Изобретение относится к технике измерения геометрических параметров колесных пар подвижного состава на железной дороге и определения пространственного положения этих колесных пар относительно железнодорожного пути при движении состава.
Известны бесконтактные системы контроля различных геометрических параметров колес и их пространственного положения относительно пути.
Например, известен способ контроля геометрических параметров колеса, заключающийся в том, что во время движения железнодорожного состава на контролируемую поверхность гребней колес перпендикулярно рельсу направляют узкий горизонтальный луч от источника света, установленного рядом с железнодорожным полотном. Затем отраженный от изношенной поверхности гребня колеса световой блик принимают фотоэлектрическим преобразователем телевизионной камеры и преобразуют в электрические сигналы. Электрические сигналы подают на блок обработки, выполняющий их пересчет в действительные размеры гребня. Износ гребня колеса измеряют в результате сравнения эталонного и контролируемого изображений поперечных сечений колеса с гребнем. (См. "Способ измерения износа гребня вагонного колеса о рельс" по японской заявке 53-43312, заявленной 03.07.72, публ. 18.11.78, 4759575, 6-1083, Ниппон кокую тэпудо, МКИ G 01 B 11/24, G 01 B 11/06, НКИ 106 FO, 106 С34).
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относится то, что в описываемом способе принято строго определенное направление луча, а именно перпендикулярно рельсу, что позволяет контролировать только износ гребня, а не всю поверхность качения колеса, ничего не заявляется об учете вертикальных колебаний системы при прогибе рельсов, что говорит о низкой точности измерений, никакие другие параметры колесных пар не контролируются.
Известен способ определения пространственного положения колесной пары относительно пути, реализованный в "Устройстве для определения угла набегания колеса грузового вагона на рельс" (см. патент РФ 2108251, заявл. 11.10.1994 г. , публ. 10.04.1998 г.). В указанном способе путем облучения колесной пары и принятия сигнала через установленные оптические створы, материализованные оптическими системами, состоящими из источников светового излучения и симметричных фотодетекторов на заданной высоте, фиксируются моменты времени, соответствующие прохождению наружных кромок гребней колесных пар. Таким образом, происходит фиксация двух противоположных точек хорд колес с последующим осреднением полученного результата и учитывается разность диаметров колес. Далее по величине взаимного пространственного смещения середин хорд оценивается угол набегания колеса или, что является эквивалентным понятием, угловой перекос оси колесной пары.
Недостатком этого способа является низкая точность измерения, т.к. из-за фиксированного расположения фотоприемников не полностью учитываются вертикальные колебания рельсов и измерительной системы, которые дают большую погрешность. Фиксация момента времени прохождения луча у наружной кромки гребня может быть недостоверна из-за налипших загрязнений на гребне колеса, из-за механических деформаций или повреждений самого гребня. Кроме того, световой луч, принимаемый фотоприемником, не несет никакой дополнительной информации о колесе, т.к. не является отраженным, что говорит о низкой информативности способа, т.е. о его низкой точности.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ мониторинга угла атаки колесной пары относительно пути, в котором путем облучения торцевой поверхности проходящего колеса лазерным диодом и последующего принятия отраженного сигнала фотодиодной линейкой проводят локацию дистанции между референтной точкой и точкой на плоской поверхности проходящего колеса, измеряют скорость колеса колесной пары в момент прохождения вблизи референтной точки, из полученных результатов измерения дистанции и значений скорости рассчитывают величину измеряемого угла атаки (углового перекоса оси), затем идентифицируют колесную пару с углом атаки, отличающимся от стандартного значения. При этом локацию проводят из референтной точки радиально по отношению к криволинейному участку пути. (См. патент США 5368260, приоритет от 02.11.1993, "Наземный мониторинг угла атаки между рельсовым путем и колесной парой").
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относится то, что в этом способе контролируемой поверхностью выбрана торцевая поверхность колеса, не находящаяся в контакте с рельсом, на ней накапливаются загрязнения, образующие неровности, имеются рельефные надписи, отраженный сигнал не соответствует реальной плоской поверхности колеса, измерение осуществляется на малой линейной базе (300-400 мм) и поэтому контроль углового перекоса производится с очень низкой точностью. В способе проводятся только локация дистанции до торцевой поверхности колеса и измерение изменения дистанции. Луч не несет никакой информации о состоянии геометрических параметров колесной пары. Проведение контроля на криволинейном участке пути - вынужденная мера, поскольку угловой перекос в этом случае достигает максимума и может быть обнаружен даже при ограниченной точности этого метода.
Задача, на решение которой направлено заявляемое изобретение, состоит в повышении безопасности эксплуатации колесных пар подвижного состава на железной дороге за счет расширения спектра контролируемых параметров и увеличения массива получаемой информации. Достигаемый технический результат заключается в повышении точности мониторинга геометрических параметров колесной пары и ее пространственного положения относительно пути, меняющихся в процессе эксплуатации и ответственных за безопасность движения.
Указанный технический результат при осуществлении изобретения достигается тем, что в способе мониторинга геометрических параметров колесной пары и ее пространственного положения относительно пути, заключающемся в том, что облучают колесо источником света и принимают сигнал в виде светового пятна, согласно изобретению устанавливают излучатели и фотоприемники для левого и правого колес симметрично относительно участка пути, формируют симметричные совокупности световых лучей в горизонтальных и вертикальных плоскостях для левого и правого колес с числом параллельных лучей в каждой плоскости не менее двух, причем взаимное расположение лучей в совокупностях определяется размерами элементарных конических поверхностей и диаметром колес, модулируют синфазно совокупности световых лучей, облучают рабочие поверхности катания и гребней левого и правого колес, контролируют высоту лучей над головками рельсов, преобразуют пространственные совокупности полученных световых пятен в информацию о геометрических параметрах отдельных фрагментов профилей левого и правого колес, в том числе об угле конусности элементарных поверхностей, сопрягают отдельные фрагменты профилей с учетом мгновенных значений высоты лучей в полные профили рабочих поверхностей колес, идентифицируют пары синфазных световых пятен левого и правого колес, полученных от симметричных световых лучей, приведенных к одной высоте, по взаимному пространственному смещению световых пятен в каждой паре с учетом угла конусности элементарных поверхностей судят о геометрических параметрах колесной пары и ее пространственном положении относительно пути.
Повышение точности мониторинга достигается благодаря симметричному расположению элементов измерительного устройства с двух сторон железнодорожного пути с большой линейной базой измерения углового перекоса, облучению рабочих поверхностей и гребней колес, синфазной модуляции световых лучей с учетом вертикальных перемещений рельсов и измерительной системы и получению при этом с высокой, ранее недостижимой точностью информации о целом комплексе геометрических параметров колесной пары и ее пространственного положения относительно пути.
Формирование совокупности лучей из двух или более параллельных лучей, разнесенных в горизонтальной плоскости на расстояние, определяемое размерами элементарных конических поверхностей, обеспечивает получение информации об отдельных фрагментах контролируемого профиля, а затем и об истинном профиле колес, о значении угла конусности элементарных конических поверхностей колеса с учетом влияния вертикальных перемещений рельсов и обеспечивает, в конечном итоге, упрощение алгоритма для определения геометрических параметров профиля и углового перекоса оси колесной пары.
Формирование совокупности лучей из двух параллельных лучей, разнесенных в вертикальной плоскости на расстояние, определяемое диаметром контролируемых колес, при котором обеспечивается формирование световых пятен на рабочей поверхности в верхней и нижней частях колеса, позволяет получить информацию о разности диаметров левого и правого колес.
Контроль высоты лучей над головками рельсов обеспечивает автоматический учет двух колебательных движений в вертикальной плоскости, а именно: рельса с колесом и основания оптического блока, обеспечивая тем самым возможность динамической разгрузки измерительной системы, что также позволяет повысить точность мониторинга.
Перечень фигур.
Фиг.1 - общая схема реализации способа.
Фиг. 2 - схема формирования совокупностей падающих и отраженных световых лучей на колесе.
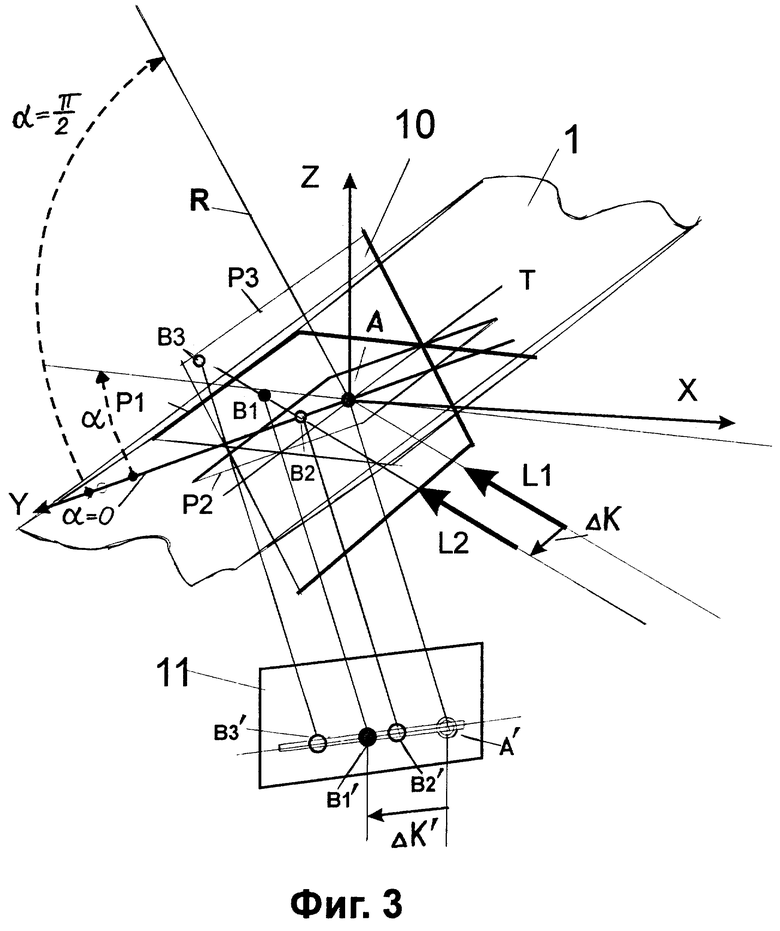
Фиг.3 - схема измерения угла конусности элементарных поверхностей.
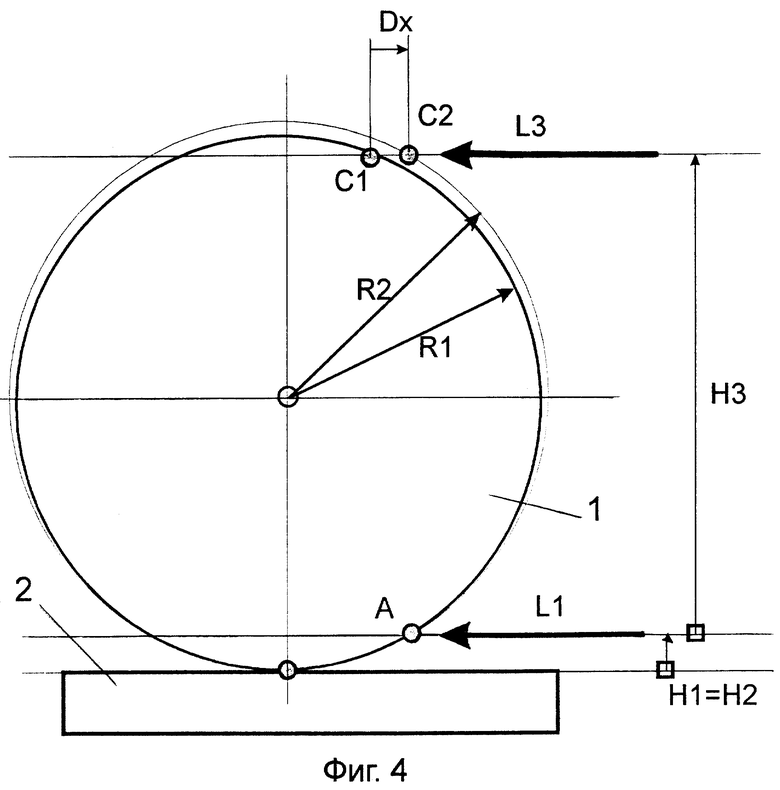
Фиг.4 - схема измерения диаметра колеса.
На фиг.1 представлена схема реализации способа с помощью устройства, состоящего из следующих составных частей.
Колесная пара в виде двух колес 1 перемещается по рельсам 2. С двух сторон пути симметрично установлены лазеры 3 и матричные фотоприемники 4. Для синфазной модуляции излучения лазеров установлен импульсный генератор 5, а для управления приемниками - блок управления 6. Сигналы обрабатываются в блоке предварительной обработки сигналов 7, затем поступают в вычислительную машину 8. Имеются преобразователи 9 вертикальных перемещений лучей относительно головки рельсов 2, установленные с обеих сторон рельсового пути.
Простейшим случаем использования нескольких синфазно модулированных лучей для мониторинга геометрических параметров колесных пар является формирование симметричных совокупностей из трех параллельных световых лучей для левого и трех параллельных лучей для правого колес колесной пары, причем расстояние ΔK между лучами L1 и L2 в горизонтальной плоскости определено размерами элементарных конических поверхностей (необходимым пространственным разрешением), а расстояние между лучами L1 и L3 в вертикальной плоскости определено диаметром колеса. При этом под элементарной конической поверхностью понимается поверхность конечной ширины, пренебрежимо мало отличающаяся от реальной контролируемой поверхности. Рассмотрим работу представляемого способа.
С обеих сторон рельсового пути левое и правое колеса 1 (фиг.1), а именно их рабочие поверхности катания и гребни, симметрично облучают оптимально коллимированными лазерными лучами LI, L2, L3, генерированными соответствующими лазерами 3. Наблюдаемую картину световых пятен А, В и С (фиг.2, 3) на контролируемых рабочих поверхностях колес отображают на матричные приемники 4 (А', В' и С'). Излучение лазеров 3 синфазно модулируют при помощи импульсного генератора 5. Матричными приемниками 4 синхронно управляют при помощи блока управления 6. Снимаемые с матричных приемников 4 электрические сигналы обрабатывают в блоке предварительной обработки сигналов 7, где аналоговым способом определяют пространственное смещение пятен, после чего они в цифровом виде поступают в вычислительную машину 8. Также на вычислитель 8 подают аналоговые или цифровые электрические сигналы с преобразователей 9 вертикальных перемещений лучей, чем обеспечивают контроль высоты лучей над головками рельсов и автоматический учет двух колебательных движений в вертикальной плоскости, а именно движения рельса 2 с колесом 1 и движения основания оптического блока с излучателем 3 и фотоприемником 4, имеющего независимую подвеску с низкой собственной частотой колебаний.
На фиг.2 и фиг.4 более подробно показано одно колесо 1 с облучающими его совокупностями из пар параллельных лучей L1 и L2, L1 и L3, расположенных на соответствующих им высотах H1, H2 и Н3, где Н1=Н2, и показано расположение матричных приемников 4.
Луч L1 образует на поверхности колеса световое пятно А. Параллельно лучу L1 на эту же поверхность направлен луч L2, который образует световое пятно В и смещен относительно луча L1 в горизонтальном направлении на небольшое расстояние ΔK (5-10 мм). Третий луч L3 смещен от луча L1 в вертикальном направлении на величину Н3 с условием попадания луча на рабочую поверхность колеса в точке С (в верхней части колеса) во всем диапазоне изменений диаметра.
Как видно из фиг.2 и фиг.4, при изменении значения радиуса колеса (R2-->R1) при износе меняется положение световых пятен (С1-->С2) на поверхности колеса вдоль направления луча L3 на величину Dx, которая геометрически связана со значениями высот H1 и Н3, а также с искомым значением разницы эталонного и истинного радиусов колеса.
На фиг. 3 рабочая поверхность колеса 1 представлена в виде элемента конической поверхности 10, расположенной в пространстве таким образом, что радиус-вектор R указывает на точку падения А луча L1, а ось Y параллельна оси колесной пары. Элемент конической поверхности 10 представлен в 3-х положениях (плоскости P1, P2, Р3) с различными значениями угла конусности α (угол между осью колесной пары и образующей элементарной конической поверхности колеса в точке падения луча L1, через которую проходит касательная Т, являющаяся общей прямой для плоскостей Р1, P2, Р3), одного из главных параметров для определения износа поверхности. Для плоскости Р1 угол α = 0, для плоскости Р3 угол α = π/2, а для плоскости P2 значение угла α принимает промежуточные значения. Здесь показано, что в случае изменения угла конусности α в пределах от 0 до π/2, световое пятно В1 от луча L2 изменяет свое положение относительно первого пятна А, полученного от луча L1, занимая различные положения вдоль направления луча L2, а именно от В2 к В3, и, соответственно, изображение этого пятна В1' смещено на чувствительной поверхности матричного приемника, которая представлена на схеме картинной плоскостью 11 относительно точки А' на величину ΔK′.
Существует однозначная связь между исходными геометрическими параметрами, включая угол α, и величиной взаимного смещения ΔK′ изображений световых пятен А', В1' в картинной плоскости 11, что позволяет определить величину угла конусности α. Значение угла α может быть в ряде случаев конечной целью контроля степени износа колес. Полученная информация об угле α исключает необходимость в итерациях в алгоритме вычисления поправки в измеренные координаты световых пятен при изменениях высоты луча Н над головкой рельса (алгоритме приведения координат точек к одной высоте), что означает получение истинных координат профиля.
Процедура вычисления величины углового перекоса оси колесной пары состоит в том, что сравнивают координаты световых пятен А на левом и правом колесах, полученные синфазно для того момента, когда они находятся примерно в серединах поверхностей катания, где угол α принимает минимальные значения. Полученная разность координат с учетом поправок на колебания высоты лучей над головками рельсов геометрически связана с угловым перекосом. При угловом перекосе, равном нулю, эти пятна имеют одинаковые координаты их энергетических центров. Для повышения точности способа проводят сравнение координат нескольких групп синфазных световых пятен на выбранных поверхностях катания, полученных в разные моменты времени.
В том случае, когда используется несколько лучей, например пять, лучи должны располагаться в горизонтальной плоскости на равных расстояниях ΔK друг от друга, что позволяет за один период импульсной модуляции излучения лазера получать информацию сразу о некоторых фрагментах профиля колеса, не искаженных вертикальными колебаниями системы отсчета, которые по одному из возможных алгоритмов сопрягаются с другими смежными фрагментами с учетом изменяющейся высоты лучей над головкой рельса. В этом случае повышается точность измерения истинных координат профиля колеса за счет увеличения количества синфазных световых пятен на контролируемом участке профиля и за счет отсутствия влияния вертикальных колебаний. Процедура измерения углового перекоса при использовании пяти лучей в горизонтальной плоскости аналогична описанному выше способу измерения при двух лучах.
После того, как вычислитель 8 выдаст всю необходимую информацию о профилях обоих колес, приведенных к одинаковой высоте над головками обоих рельсов, о боковом смещении обоих колес относительно внутренних поверхностей головок рельсов, вступает в действие программа расчета углового перекоса оси колесной пары. Для этого вычислитель при помощи одного из возможных алгоритмов идентифицирует попарно световые пятна, зарегистрированные синфазно, и с учетом бокового смещения определяет их пространственное несовпадение. В случае отсутствия углового перекоса оси это несовпадение равно нулю.
Таким образом, рассмотренный способ контроля геометрических параметров колесных пар, а также их пространственного положения относительно пути позволяет контролировать:
- профиль рабочих поверхностей колес,
- боковое смещение колесной пары относительного рельсового пути,
- угловой перекос оси колесной пары относительно рельсового пути,
- отклонение значения диаметра колес от номинального (эталонного) значения или разность диаметров левого и правого колес.

Изобретение относится к технике измерения геометрических параметров колесной пары подвижного состава, меняющихся в процессе эксплуатации и ответственных за безопасность движения, и направлено на повышение точности мониторинга. Сущность: облучают колесо источником света и принимают картину отраженных световых пятен, устанавливают излучатели и фотоприемники для левого и правого колес симметрично относительно участка пути, формируют симметричные совокупности световых лучей для левого и правого колес в горизонтальных и вертикальных плоскостях с числом параллельных лучей в каждой плоскости не менее двух, причем взаимное расположение лучей в совокупностях определяется размерами элементарных конических поверхностей и диаметров колес, модулируют синфазно совокупности световых лучей для левого и правого колес, облучают рабочие поверхности катания и гребней левого и правого колес, контролируют высоту лучей над головками рельсов, преобразуют пространственные совокупности полученных световых пятен в информацию о геометрических параметрах отдельных фрагментов профилей левого и правого колес, в том числе об угле конусности элементарных поверхностей, сопрягают отдельные фрагменты профилей с учетом мгновенных значений высоты лучей в полные профили рабочих поверхностей колес, идентифицируют пары синфазных световых пятен левого и правого колес, полученных от симметричных световых лучей, приведенных к одной высоте, по взаимному пространственному смещению световых пятен в каждой паре с учетом угла конусности элементарных поверхностей, судят о геометрических параметрах колесной пары и ее пространственном положении относительно пути. Технический результат: достоверный одновременный контроль сразу нескольких параметров, таких как угол перекоса осей колесной пары и ее боковое смещение, разность диаметров колес пары, а также степень износа рабочих поверхностей колес и гребней колес с учетом колебательных и связанных с ударными нагрузками перемещений при любой скорости движения подвижного состава. 4 ил.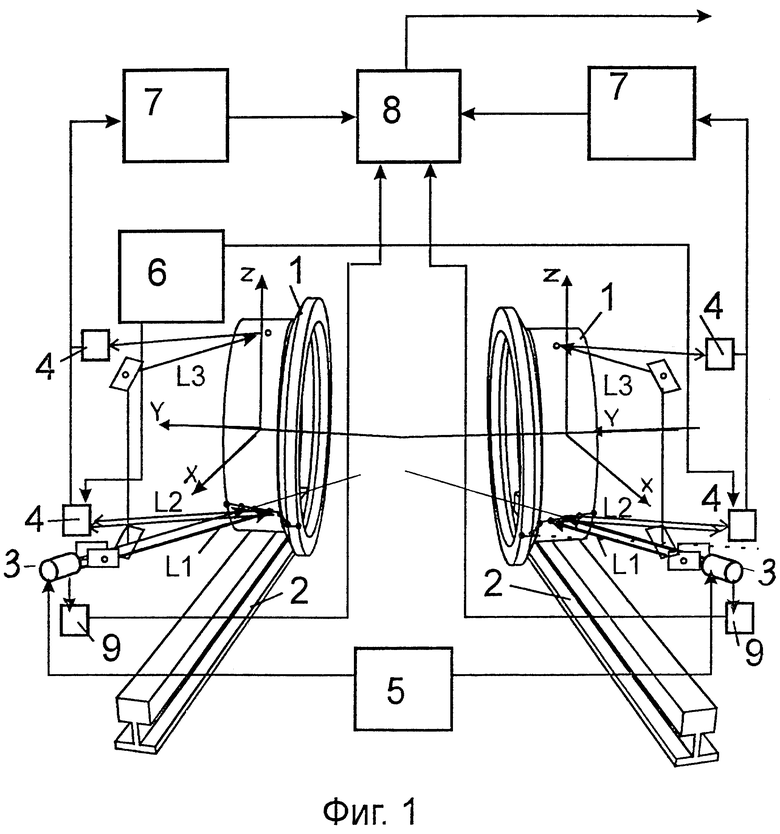
Способ мониторинга геометрических параметров колесной пары и ее пространственного положения относительно пути, заключающийся в том, что облучают колесо источником света и принимают сигнал в виде светового пятна, отличающийся тем, что устанавливают излучатели и фотоприемники для левого и правого колес симметрично относительно участка пути, формируют симметричные совокупности световых лучей в горизонтальных и вертикальных плоскостях для левого и правого колес, с числом параллельных лучей в каждой плоскости не менее двух, причем взаимное расположение лучей в совокупностях определяется размерами элементарных конических поверхностей и диаметром колес, модулируют синфазно совокупности световых лучей, облучают рабочие поверхности катания и гребней левого и правого колес, контролируют высоту лучей над головками рельсов, преобразуют пространственные совокупности полученных световых пятен в информацию о геометрических параметрах отдельных фрагментов профилей левого и правого колес, в том числе об угле конусности элементарных поверхностей, сопрягают отдельные фрагменты профилей с учетом мгновенных значений высоты лучей в полные профили рабочих поверхностей колес, идентифицируют пары синфазных световых пятен левого и правого колес, полученных от симметричных световых лучей, приведенных к одной высоте, по взаимному пространственному смещению световых пятен в каждой паре с учетом угла конусности элементарных поверхностей, судят о геометрических параметрах колесной пары и ее пространственном положении относительно пути.
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| US 4932784 A, 12.06.1990 | |||
| СПОСОБ КОНТРОЛЯ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПРИ ДВИЖЕНИИ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2122956C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗНОСА РЕБОРДЫ ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2116214C1 |
