Изобретение относится к области измерительной техники и может быть использовано для автоматизированного контроля технического состояния колесной пары и ее положения относительно рельсового пути подвижного состава железнодорожного транспорта.
В настоящее время, в связи с ростом скоростей движения рельсового транспорта, с одной стороны, и старением подвижного состава с другой, актуальной становится задача объективного контроля за техническим состоянием железнодорожного подвижного состава. Одними из наиболее нагруженных узлов железнодорожного вагона, требующих постоянного контроля, являются колесные пары, изменяющие свои параметры в процессе эксплуатации. Проводимые периодические осмотры вагонов на станциях требуют значительных временных затрат, что существенно увеличивает время в пути. При этом при осмотрах присутствует элемент субъективизма, т.к. качество осмотра зависит от квалификации осмотрщика вагонов, количества обслуживаемого персонала и т.п. Для исключения элементов субъективизма необходим постоянный мониторинг за состоянием параметров колесной пары в течение всего времени их эксплуатации.
Кроме того, одним из наиболее важных параметров колесной пары является ее положение относительно рельсового пути, который практически не в состоянии обнаружить осмотрщик вагонов.
Известен способ выявления дефектов на поверхности катания колеса (см. а.с.№1066866, кл. В 61 К 9/12), основанный на измерении вертикального виброускорения рельса. Известный способ позволяет производить оценку состояния поверхности катания колеса, в основном эллипсность колеса, на скоростях более 50 км/час, т.е. выявлять такие состояния колеса, при которых дальнейшая его эксплуатация невозможна.
Известен способ измерения параметров качения колеса железнодорожного вагона (см. патент РФ №2153432, кл. В 61 К 9/12), основанный на прокатывании колеса со скоростью маневрирования наружным краем поверхности качения по специальной стальной плите и облучении при этом плоским лучом света внутренней части поверхности катания колеса. Синхронно с облучением производят захват изображения светящегося профиля колеса при помощи телекамеры и после дальнейшей обработки полученного изображения на ЭВМ, осуществляют визуализацию измеренного профиля на мониторе.
Известный способ позволяет автоматизировать процесс измерения параметров качения колеса, но при этом имеет два существенных недостатка.
Во-первых, для измерения используется специальная установка, которая механически удерживает колесо на стальной плите, захватывающей только наружную часть поверхности качения. Поэтому процесс измерения проходит на скорости маневрирования вагонов, а не в реальных условиях эксплуатации.
Во-вторых, известный способ не позволяет существенно ускорить время проведения технического осмотра по сравнению с традиционным способом осмотра состава осмотрщиками, хотя превосходит последний по степени объективности контроля.
Известен способ контроля поверхности катания колеса (DE №3611795, кл. G 01 B 11/24, 11/14), заключающийся в освещении в момент измерения поверхности катания колеса в процессе вращения, регистрацию фотоприемниками отраженного света в определенных точках пространства и обработке сигналов фотоприемников. Освещение и сканирование поверхности катания производят при помощи двух источников: неподвижного точечного и сканирующего при помощи зеркального барабана последовательность точек на поверхности катания перпендикулярно направлению движения, а регистрацию отраженного света осуществляют при помощи двух групп фотоприемников, расположенных в фиксированных точках пространства относительно оси вращения колеса и под определенными углами к поверхности катания колеса.
Известный способ позволяет производить контроль поверхности катания колеса во время движения вагона, но для получения воспроизводимых достоверных значений, пригодных для практического применения, необходимо жестко фиксировать фотоприемники относительно тележки вагона. Фактически указанный способ пригоден лишь для измерения параметров поверхности катания колес конкретного вагона, а не всех вагонов состава.
Кроме того, известный способ не позволяет измерять параметры гребня колеса, что также существенно ограничивает его возможности.
Наиболее близким по технической сути к заявляемому способу (прототипом) является способ мониторинга геометрических параметров колесной пары и ее пространственного положения относительно пути (см. патент РФ 2180300, кл. В 61 К 9/12, 2002 г.), заключающийся в том, что колесо облучают источником света и принимают картину отраженных световых пятен, устанавливают излучатели и фотоприемники для левого и правого колес симметрично относительно участка пути, формируют симметричные совокупности световых лучей для левого и правого колес в горизонтальных и вертикальных плоскостях с числом параллельных лучей в каждой плоскости не менее двух, причем взаимное расположение лучей в совокупностях определяется размерами элементарных конических поверхностей и диаметров колес, модулируют синфазно совокупности световых лучей для левого и правого колес, облучают рабочие поверхности катания и гребней левого и правого колес, контролируют высоту лучей над головками рельсов, преобразуют пространственные совокупности полученных световых пятен в информацию о геометрических параметрах отдельных фрагментов профилей левого и правого колес, в том числе об угле конусности элементарных поверхностей, сопрягают отдельные фрагменты профилей с учетом мгновенных значений высоты лучей в полные профили рабочих поверхностей колес, идентифицируют пары синфазных световых пятен левого и правого колес, полученных от симметричных световых лучей, приведенных к одной высоте, по взаимному пространственному смещению световых пятен в каждой паре с учетом угла конусности элементарных поверхностей, судят о геометрических параметрах колесной пары и ее пространственном положении относительно пути.
Основным недостатком известного способа является сложность его технической реализации при движении состава. Это связано с тем, что измерение параметров колеса производят путем преобразования пространственных совокупностей полученных световых пятен в информацию о геометрических параметрах отдельных фрагментов профилей левого и правого колес, сопряжением отдельных фрагментов профилей с учетом мгновенных значений высоты лучей в полные профили рабочих поверхностей колес. Проводить указанные измерения и восстановление профиля колеса невозможно в реальном времени, а значит, необходимы специальные участки дорог для мониторинга параметров колесных пар.
Кроме того, в известном способе мониторинга осуществляют прием отраженного излучения световых пятен. Известно, что отраженный световой сигнал во многом зависит от поверхности отражения. Если поверхность отражения загрязнена, то отраженный сигнал практически будет отсутствовать. При этом необходимо учесть и то обстоятельство, что принимать отраженный сигнал нужно в строго заданном месте. Изменение наклона отражающей поверхности (выработка на колесе) приведет к отклонению отраженного светового пятна.
Целью настоящего изобретения является устранение указанных недостатков, а именно проведение мониторинга параметров колесной пары и ее положения относительно рельсового пути при движении состава в реальном времени в не зависимости от состояния контролируемых поверхностей.
Указанная цель в способе мониторинга параметров колесной пары и ее положения относительно рельсового пути, заключается в том, что облучают фрагменты поверхности на наружной части колеса световым излучением, осуществляют прием излучения от облучаемых фрагментов поверхности колес и по ним восстанавливают форму колес и положение колесной пары относительно рельсового пути, достигается тем, что дополнительно производят облучение фрагментов поверхности на внутренней части колес колесной пары, при этом в качестве освещаемых фрагментов колес используют линейный профиль колеса на заданной высоте от рельсового пути, а по принятому от облучаемых фрагментов колес рассеянному излучению восстанавливают полный профиль каждого из колес, сравнивают эти профили с заранее известными профилями эталонной колесной пары и по результатам сравнения делают вывод о возможности дальнейшей эксплуатации колесной пары.
Указанное выполнение способа, позволяет восстанавливать профиль рабочих поверхностей колеса за счет прямого измерения его наружного и внутреннего профилей независимо от скорости движения колеса, при этом прием рассеянного излучения от облучаемых фрагментов колес позволяет упростить процесс приема отраженного сигнала и не зависит от степени загрязнения контролируемой поверхности, а сравнение текущих, измеренных значений профилей колеса с эталонными значениями, позволяет сделать однозначный вывод о пригодности данного колеса к дальнейшей эксплуатации.
Полный профиль каждого из колес возможно восстанавливать путем пространственного совмещения внутреннего и наружного профилей колеса, что позволяет получать объективную картину о его текущем состоянии.
Процесс облучения внутренних и внешних фрагментов поверхности каждого из колес и прием рассеянного излучения от облучаемых фрагментов возможно проводить с использованием не менее чем двух оптических дальномеров, один из которых установлен снаружи рельсового пути, а другой - внутри рельсового пути. Заранее зная привязку каждого из дальномеров к рельсовому полотну, легко производить операцию по совмещению внутреннего и наружного профилей колеса.
Делать вывод о возможности дальнейшей эксплуатации колесной пары возможно после наложения измеренного профиля внутренней или наружной поверхности колеса на эталонный профиль, при этом отклонение измеренного профиля колеса от эталонного не должно на любом отрезке профиля превышать контрольной величины.
Положение колесной пары относительно рельсового пути можно определять методом наложения однотипных профилей колес друг на друга, а по величине пространственного смещения одного из профилей можно делать вывод об отставании одного из колес колесной пары.
Заявляемый способ мониторинга параметров колесной пары и ее положения относительно рельсового пути позволяет объективно контролировать параметры колесной пары при ее движении по рельсовому пути в реальном времени, что не имеет аналогов в измерительной технике, используемой на железнодорожном транспорте, а значит соответствует критерию «изобретательский уровень».
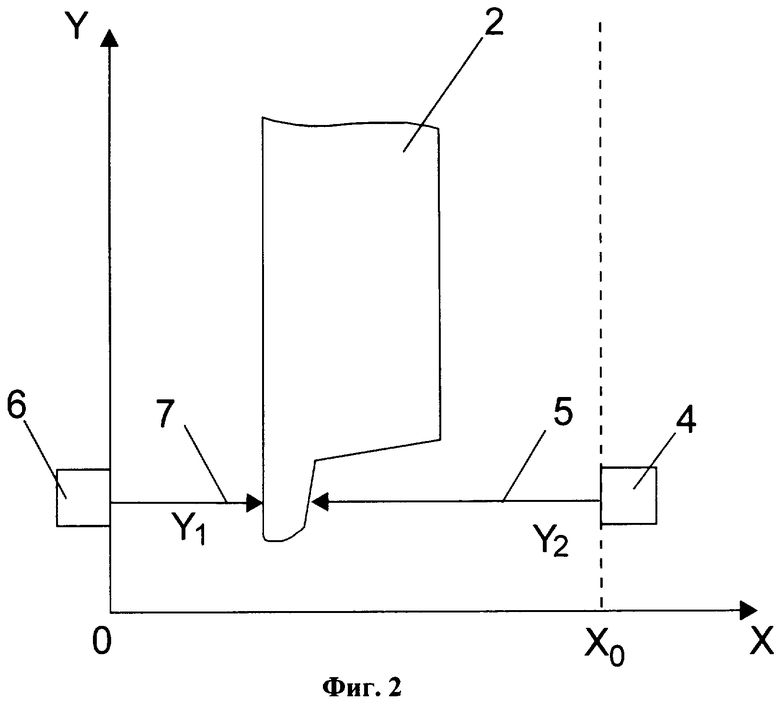
На фиг.1 представлена схема реализации заявляемого способа.
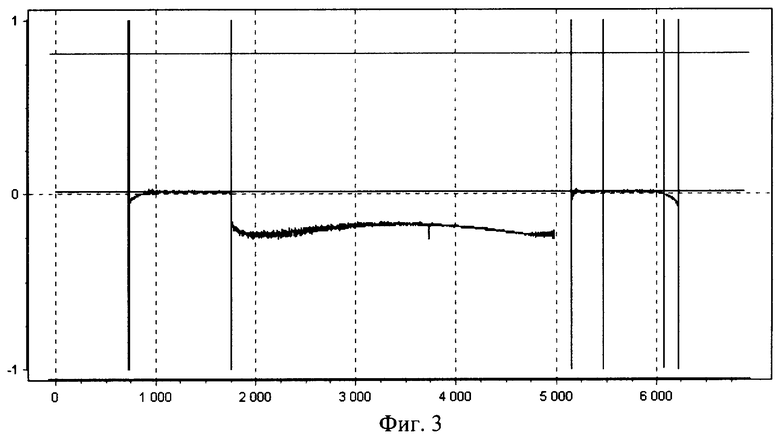
На фиг.2 представлен рисунок, поясняющий принцип формирования профиля колеса.
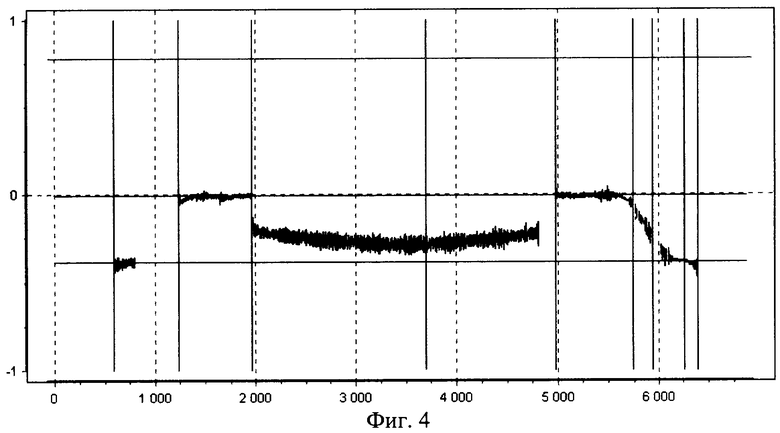
На фиг.3 представлен реально снятый график профиля внутренней поверхности колеса.
На фиг.4 представлен реально снятый график профиля наружной поверхности колеса.
Схема реализации заявляемого способа (см. фиг.1)включает: колесную пару 1 с колесами 2, находящуюся на рельсовом пути 3; оптический дальномер 4 для наружной стороны колеса со сканирующим лучом 5, оптический дальномер 6 для внутренней стороны колеса со сканирующим лучом 7; блок обработки информации 8, соединенный с компьютером 9. Устройство работает следующим образом.
При движении по рельсовому пути колесная пара 1 попадает в поле зрения оптических дальномеров 4 и 6, которые своими световыми лучами 5 и 7 сканируют наружный и внутренний профиль колеса 1 (см. фиг.2). Оптический дальномер 6, сканируя лучом 7, формирует текущую координату Y1 внутренней поверхности колеса 2, а оптический дальномер 4, сканируя лучом 5, формирует текущую координату Y2 его наружной поверхности. Сигнал от оптического дальномера 6 используется в качестве базового сигнала, необходимого для привязки начала координат оптического дальномера 4, т.к. внутренняя поверхность колеса выбрана в качестве базовой поверхности для определения координат его наружного профиля. Перед началом измерений производят юстировку оптических дальномеров, т.е. производят точное определение координаты Х0 (расстояние между оптическими дальномерами 4 и 6), которую вносят в качестве исходной координаты в блок обработки информации 8. Перед началом измерений текущих координат для каждого из колес состава из блока 8 по сигналу магнитной педали (на фиг.1 она не показана) поступает сигнал на включение оптических дальномеров. Сигналы с оптических дальномеров 4 и 6 в виде набора текущих координат точек сканируемых поверхностей колес поступают на блок обработки информации 8, где из них формируют законченный профиль поверхности колеса (см. фиг.3 и 4). После определения указанных профилей, их сравнивают с эталонными сигналами и делают отметку об их состоянии. Указанное сравнение полученных и эталонных профилей без дополнительных измерений позволяет получить информацию о положении колесной пары относительно рельсового пути. Для этого сравнивают начальные координаты колес, например, Y1 правого колеса с Y1 левого колеса. Если один из полученных профилей «обгоняет» другой, значит присутствует элемент перекоса оси 1.
Полученные профили колес с отметками об их техническом состоянии с указанием номера состава с конкретным указанием номера вагона и колеса поступают в компьютер 9 (информационную базу железной дороги). Ремонтные бригады ближайшей станции технического обслуживания вагонов на основании полученной информации идентифицируют указанные колеса и производят их необходимое техническое обслуживание.
В качестве оптического дальномера при проведении измерений использовался сертифицированный лазерный дальномер марки "Лабракон", работающий по принципу триангуляционного измерителя расстояния с допустимой погрешностью измерения расстояния 0,2 мм.
Проведенные натурные испытания макета устройства, реализующего заявляемый способ, полностью подтвердили его работоспособность и применимость для мониторинга параметров колесных пар подвижного состава и их положения относительно рельсового пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО ПУТИ | 2000 |
|
RU2180300C1 |
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ КОЛЕС ПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2268183C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ БУКСЫ КОЛЕСНОЙ ПАРЫ | 2003 |
|
RU2258017C2 |
| СПОСОБ МОНИТОРИНГА ПЕРЕМЕЩЕНИЙ БУКСЫ | 2009 |
|
RU2453458C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280577C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ БУКСЫ КОЛЕСНОЙ ПАРЫ | 2010 |
|
RU2430848C1 |
| СПОСОБ КОНТРОЛЯ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2008 |
|
RU2393970C1 |
| СИСТЕМА ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ ПОВЕРХНОСТЕЙ КАТАНИЯ КОЛЕС КОЛЕСНОЙ ПАРЫ И СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ ПОВЕРХНОСТЕЙ КАТАНИЯ КОЛЕСНОЙ ПАРЫ С ЕЕ ПОМОЩЬЮ | 2023 |
|
RU2811175C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩЕЙСЯ КОЛЕСНОЙ ПАРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2023 |
|
RU2818377C1 |
| СПОСОБ КОМПЛЕКТАЦИИ ЖЕЛЕЗНОДОРОЖНОГО КОЛЕСА СРЕДСТВАМИ АВТОМАТИЧЕСКОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2015 |
|
RU2606410C2 |
Изобретение относится к измерительной технике и может быть использовано для автоматизированного контроля технического состояния колесной пары и ее положения относительно рельсового пути подвижного состава железнодорожного транспорта. Способ мониторинга параметров колесной пары и ее положения относительно рельсового пути, заключается в том, что облучают световым излучением рабочую поверхность колеса и по принятому излучению определяют профиль колеса и положение колесной пары относительно рельсового пути. В качестве принятого излучения используют рассеяное излучение от точек на облучаемой рабочей поверхности колеса, измеряют координаты этих точек и по полученным координатам формируют законченный профиль колеса, который сравнивают с эталонным профилем колеса колесной пары. По результатам сравнения делают вывод о возможности дальнейшей эксплуатации колесной пары. Технический результат - проведение мониторинга вне зависимости от состояния контролируемых поверхностей. 4 ил.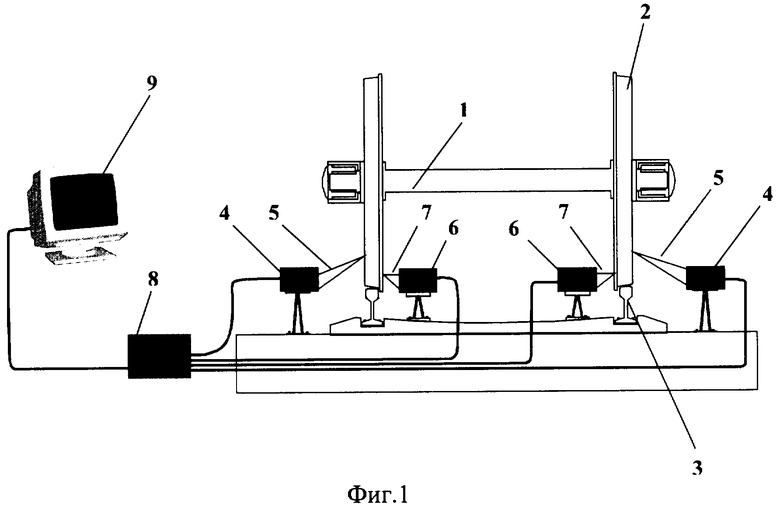
Способ мониторинга параметров колесной пары и ее положения относительно рельсового пути, заключающийся в том, что облучают световым излучением рабочую поверхность колеса и по принятому излучению определяют профиль колеса и положение колесной пары относительно рельсового пути, отличающийся тем, что в качестве принятого излучения используют рассеяное излучение от точек на облучаемой рабочей поверхности колеса, измеряют координаты этих точек и по полученным координатам формируют законченный профиль колеса, который сравнивают с эталонным профилем колеса колесной пары, а по результатам сравнения делают вывод о возможности дальнейшей эксплуатации колесной пары.
| СПОСОБ МОНИТОРИНГА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО ПУТИ | 2000 |
|
RU2180300C1 |
| Динамометрическая втулка | 1921 |
|
SU600A1 |
| Руководство по эксплуатации [он-лайн], 12.10.2002, всего 9с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗНОСА РЕБОРДЫ ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2116214C1 |

