Изобретение относится к области медицинской диагностики, а именно к ортопедической диагностике.
Для ортопедической диагностики важное значение имеет информация о рельефе подошвенной части стоп в нагруженном (при стоянии) и ненагруженном состояниях, распределении давления по поверхности стопы на опорную плоскую поверхность, величине угла разворота продольных осей стопы, проекции центров тяжести каждой ноги и всего тела на опорную поверхность и о динамике вариаций всех перечисленных параметров при стоянии.
Между тем авторам неизвестны устройства, которые позволяли бы одновременно в реальном масштабе времени получать всю указанную информацию.
Известны устройства [1], позволяющие получить модель подошвенной области стопы, содержащие подставку, опоку, заполненную сыпучим наполнителем и покрытую воздухонепроницаемой эластичной пленкой, вакуум-насос, вакуум-провод, соединяющий вакуум-насос с опокой, выполненной в виде трубопровода прямоугольного (или близкого к нему) сечения, полость которого с помощью штуцера соединяется с вакуум-проводом, а на внутренней стенке опоки имеются отверстия, через которые из герметичного пространства, образованного опокой и обтягивающей ее эластичной пленкой и заполненного сыпучим наполнителем, откачивается воздух. Чтобы при этом сыпучий наполнитель не попадал в вакуумную систему, отверстия опоки закрыты воздухопроницаемым фильтром.
Устройство позволяет получить негативный отпечаток стопы и работает следующим образом. При атмосферном давлении в вакуумной системе пациент становиться на эластичную пленку, закрывающую опоку с сыпучим материалом, и подподошвенная поверхность сыпучего наполнителя под давлением стопы приобретает негативный рельеф подошвенной части стопы. Далее включается вакуум-насос, откачивающий воздух из внутреннего пространства опоки, в результате чего частички сыпучего наполнителя плотно сцепляются друг с другом и поверхность сыпучего наполнителя сохраняет негативный отпечаток подошвенной части стопы.
Все необходимые измерения проводятся с помощью ручных измерительных средств (линейка, штангенциркуль) либо непосредственно по этому негативному отпечатку, либо по получаемому с него гипсовому слепку - модели подошвенной поверхности стопы.
Известны также способ и устройство [2] для исследования опорной функции стопы, состоящее из носка, выполненного из эластичного воздухонепроницаемого материала, надеваемого на ногу пациента, в центре подошвы которого имеется патрубок для последующей откачки воздуха, подстопник, выполненный из прозрачного материала (стекла) с отверстием под патрубок носка, вертикально установленными измерительной трубкой и шкалой, которая через колено, заполненное подкрашенной жидкостью, может соединяться с патрубком носка. При надевании носка на ногу пациента патрубок открыт и вследствие эластичности материала носка при установке ноги на подстопник (при этом патрубок носка проходит через соответствующие отверстия в подстопнике) без нагрузки (пациент сидит) нижняя поверхность носка является плоской, а ее контур соответствует контуру ступни. Этот контур можно зарисовать на нижней поверхности прозрачного подстопника. Затем патрубок подсоединяют к шприцу и отсасывают воздух из подстопного пространства, пока нижняя поверхность носка не окажется плотно прижатой к поверхности стопы. По объему воздуха в шприце определяют объем подстопного пространства в ненагруженном состоянии. Затем патрубок отсоединяют от шприца (при этом воздух опять заполняет подстопное пространство) и через колено, заполненное подкрашенной жидкостью, подсоединяют к измерительной трубке. После этого пациент становится на ноги, подсводное пространство при нагрузке уменьшается, вследствие чего жидкость из колена поднимается по измерительной трубке на величину, соответствующую объему воздуха, выдавливаемого из подстопного пространства при нагрузке. Зная его начальный объем (в ненагруженном состоянии), можно определить оставшийся объем подсводного пространства в нагруженном состоянии. А по отпечаткам ступни на подстопнике (для этого наружная поверхность подошвенной части может покрываться красящим веществом) можно находить площадь опорной поверхности стопы как в нагруженном, так и в ненагруженном состояниях.
Известно также устройство [3] для определения распределения давления тела человека на опорные поверхности, которое состоит из многоконтактного датчика давления тела, регулируемого источника воздуха с датчиком давления воздуха, коммутатора и измерительного блока. Датчик давления тела состоит из эластичных мембран, образующих замкнутую полость (опорную подушку), при этом на внутренних поверхностях мембран имеются металлизированные контактные площадки. На нижней мембране они точечные и образуют измерительную матрицу, а на верхней - зигзагообразной формы, расположенные таким образом, что при полном прижатии мембран друг к другу верхняя контактная система полностью перекрывает все контактные площадки нижней мембраны (не замыкая при этом отводы от них). Устройство работает следующим образом. Пациент садится или становится на опорную подушку. При этом, конечно, все контакты замыкаются. Включается коммутатор, поочередно подключающий к измерительному блоку все контактные площадки нижней мембраны и датчик давления воздуха. Затем в опорную подушку накачивают сжатый воздух от компрессора. По мере роста давления воздуха в межмембранном пространстве начинают размыкаться контакты (сначала там, где давление тела слабее, потом там, где сильнее). При циклически повторяющихся опросах одновременно фиксируются все оставшиеся замкнутыми контакты и соответствующее этому циклу давление воздуха. По давлению воздуха, соответствующему разрыву контакта, можно определить давление тела в данной точке.
Известны также [4] тензометрические устройства, позволяющие измерять давление на локальных участках подошвенной области стопы как в статике (при стоянии), так и в динамике (при ходьбе). Такие устройства содержат миниатюрные тензометрические датчики, закрепляемые на опорной платформе (при стоянии) или в обуви (при ходьбе). Сигнал с датчиков измеряется стрелочным прибором (в статике, т.е. при стоянии) или подается на шлейфовый или электронный осциллограф (для исследований в динамике, т.е. при ходьбе). Однако число устанавливаемых датчиков не превышает 3-5, что дает возможность измерять давление лишь в нескольких точках стопы.
Известны также устройства, называемые стабилографами [4, 5], позволяющие определить положение проекции общего центра масс (ОЦМ) пациента на горизонтальную плоскость при стоянии. Устройство представляет собой горизонтальную опорную платформу, на которую становится обеими ногами пациент. Платформа опирается на три (расположенные в виде равнобедренного треугольника) или четыре (расположенных по углам прямоугольной платформы) упругих элемента с прикрепленными к ним тензодатчиками, сигналы с которых поступают на шлейфовый осциллограф и регистрируются. Затем эти записи совместно обрабатываются и для каждого момента времени вычисляется проекция ОЦМ на опорную горизонтальную плоскость. Метод требует весьма длительной и трудоемкой математической обработки полученных записей сигналов, проводимой вручную.
Таким образом, хотя и существуют определенные методы и устройства, позволяющие определить некоторые из вышеуказанных ортопедических диагностических признаков, однако, во-первых, их невозможно совместить, чтобы одновременно получить информацию о всех этих признаках, во-вторых, ни одно из этих устройств не позволяет получить информацию в готовом виде в реальном масштабе времени (после эксперимента требуется кропотливая и трудоемкая обработка его результатов для извлечения полезной информации), в-третьих, не все диагностические признаки могут быть этими устройствами измерены и, в-четвертых, большую сложность представляет измерение динамических характеристик изменений этих параметров при спокойном стоянии (в частности, динамика изменений рельефа стопы имеющимися устройствами не может быть определена).
Технической задачей, на решение которой направлено предлагаемое изобретение, является создание устройства (комплекса), обеспечивающего одновременное измерение в реальном масштабе времени таких ортопедических диагностических признаков, как: рельеф подошвенной части стопы; распределение давления по площади опоры стопы; положение проекций центров тяжести каждой ноги и общего центра масс тела на горизонтальную плоскость относительно проекций стоп; угол разворота между продольными осями стоп при естественном состоянии в удобной позе; а также динамические характеристики вариаций этих параметров при спокойном стоянии. При этом вся указанная информация должна представляться врачу в окончательном наглядном и удобном для непосредственного использования виде, не требуя никакой дополнительной ручной обработки, и автоматически регистрироваться.
Решение указанной задачи достигается путем создания ортопедического диагностического комплекса, состоящего из измерительной опорной платформы и электронной системы. Измерительная опорная платформа содержит две (под каждую из стоп) опорные площадки, образованные сгруппированными в матрицы прямоугольной формы совмещенными преобразователями вертикального перемещения и давления, которые размещены на поворотных платформах, снабженных датчиками угла поворота, и могут поворачиваться в горизонтальной плоскости на определенный угол, а поворотные платформы опираются на базовые опорные платформы, одна из которых неподвижна, а вторая выполнена с возможностью линейного перемещения в горизонтальной плоскости относительно неподвижной платформы и снабжена датчиком линейного перемещения. Электронная система содержит блок аналоговых коммутаторов, генератор возбуждающих сигналов первичных преобразователей, измерительный блок, интерфейсный модуль и персональную ЭВМ, причем входы питания совмещенных преобразователей вертикального перемещения и давления, их информационные выходы и информационные выходы датчиков угла поворота и линейного перемещения через блок аналоговых коммутаторов соединены соответственно с выходом генератора возбуждающих сигналов и информационным входом измерительного блока, выход измерительного блока соединен с цифровым входом интерфейсного модуля, который через стандартный канал связи соединен с персональной ЭВМ, выходы которой через интерфейсный модуль подключены к управляющим входам блока аналоговых коммутаторов и измерительного блока. Полученная от датчиков информация обрабатывается персональной ЭВМ по специальным программам, в наглядном и удобном для врача виде отображается на экране ЭВМ и может быть записана в долговременную память.
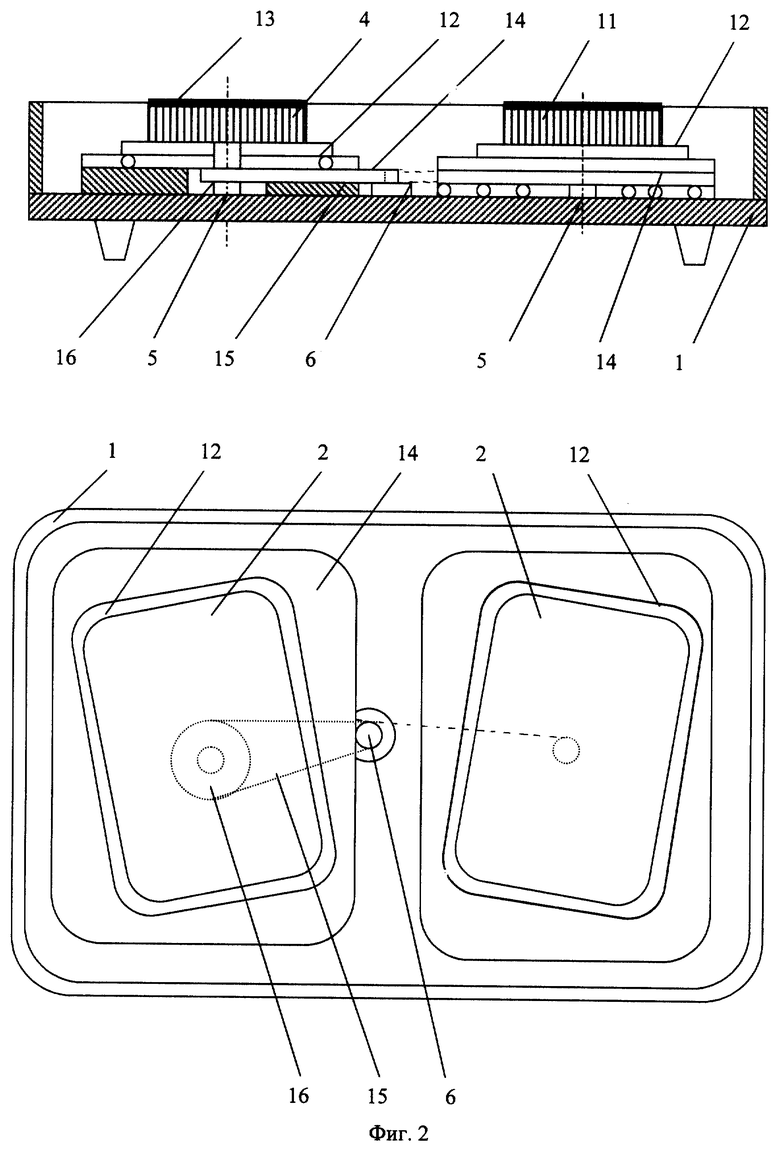
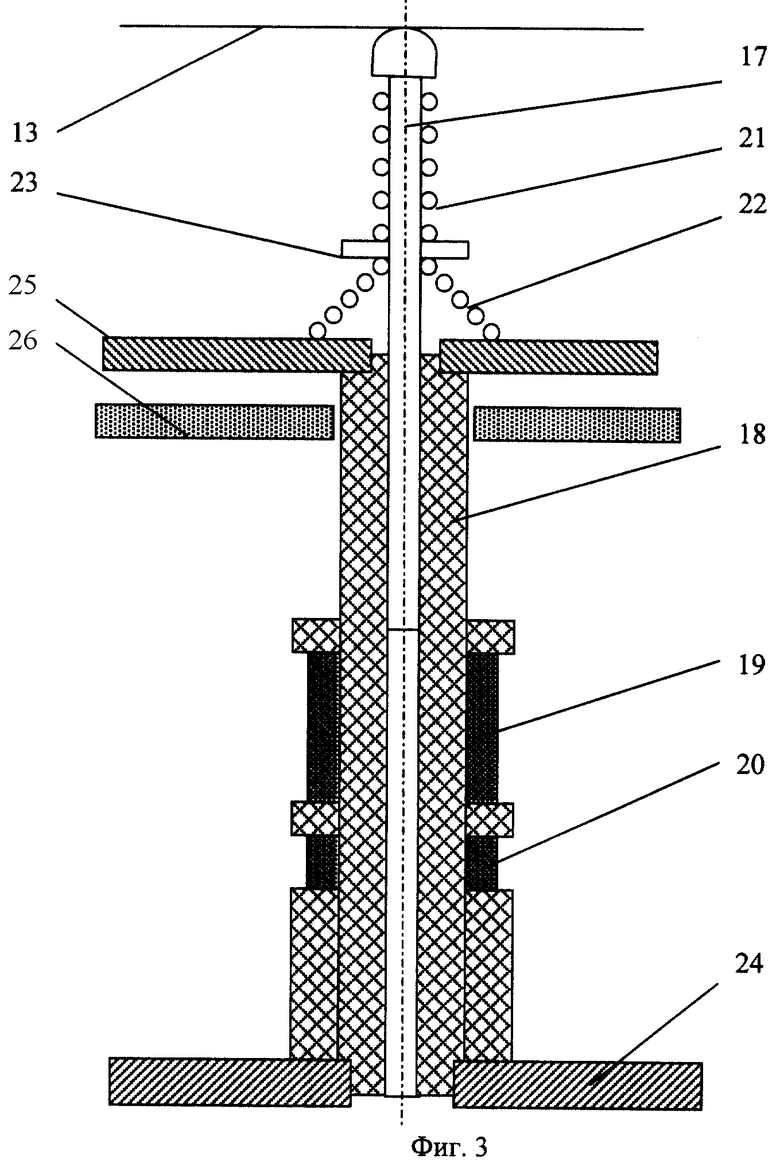
Сущность изобретения поясняется структурно-функциональной схемой ортопедического диагностического комплекса (фиг.1), схематическими чертежами измерительной опорной платформы (фиг.2) и схемой совмещенного преобразователя вертикального перемещения и давления (фиг.3).
Ортопедический диагностический комплекс (фиг.1) состоит из измерительной опорной платформы 1, электронной системы 2 и персональной ЭВМ 3.
Измерительная опорная платформа 1 содержит две опорные площадки 4, образованные сгруппированными в матрицы прямоугольной формы совмещенными преобразователями вертикального перемещения и давления, датчиками 5 угла поворота, размещенными в каждой опорной площадке, и датчиком 6 расстояния между центрами опорных площадок.
Электронная система 2 состоит из блока аналоговых коммутаторов 7, генератора 8 возбуждающих сигналов первичных преобразователей, измерительного блока 9 и интерфейсного модуля 10, обеспечивающего связь с персональной ЭВМ 3.
Измерительная платформа (фиг.2) содержит две опорные площадки 4, в которых размещены сгруппированные в матрицы прямоугольной формы совмещенные преобразователи вертикального перемещения и давления 11. Опорные площадки жестко установлены на поворотные платформы 12 с возможностью свободного поворота на некоторый угол в горизонтальной плоскости. С вертикальной осью каждой поворотной платформы совмещены датчики 5 угла поворота. Сверху поверхности опорных площадок обтянуты сменной эластичной пленкой 13. Поворотные платформы опираются на базовые несущие платформы 14, одна из которых (на фиг. 2 - левая) неподвижна, а вторая может перемещаться линейно относительно базовой неподвижной платформы. Для измерения величины этого перемещения установлен датчик 6 линейного перемещения, представляющий собой многооборотный потенциометрический преобразователь, связанный с помощью установленного на его оси шкива с тросиком 15, один конец которого закреплен на подвижной базовой платформе, а второй конец - на блоке 16 со спиральной пружиной, обеспечивающей постоянное натяжение тросо-блочной передачи. Может быть использован преобразователь линейного перемещения любого другого типа, обеспечивающий диапазон измерения 250-300 мм с погрешностью не более ±5 мм.
Совмещенные преобразователи вертикального перемещения и давления могут быть реализованы различным образом. Диапазон измерения линейного перемещения должен быть не менее 20 мм, а давления (веса) - до 0,5 кг при допустимых погрешностях не свыше 5%. Поперечные размеры совмещенного преобразователя не должны превышать 8 мм (чтобы можно было составить из них матрицу с шагом не более 10 мм). Кроме того, важным требованием является высокая перегрузочная способность по давлению, в том числе и к ударным нагрузкам.
На фиг.3 приведен возможный вариант совмещенного преобразователя вертикального перемещения и давления индуктивного типа, удовлетворяющий всем предъявляемым требованиям. Он состоит из ферромагнитного цилиндрического стержня 17, который может свободно перемещаться в осевом отверстии каркаса 18 датчика, выполненного из диэлектрика. На каркасе размещены обмотки 19 и 20, первая из которых чувствительна к вертикальному перемещению ферромагнитного стержня 17, а вторая - к давлению. Стержень 17 подпружинен двумя пружинами: цилиндрической 21 с малой жесткостью и диапазоном вертикального сжатия до 20 мм и конической 22 с большой жесткостью и диапазоном сжатия до 3 мм. Пружины разделены между собой шайбой 23. Каркасы датчиков закрепляются между опорными металлическими пластинами 24 и 25, между которыми находится печатная плата 26, к которой припаиваются выводы обмоток всех датчиков матрицы и на ней же размещены интегральные схемы аналогового коммутатора.
Верхние торцы ферромагнитных стержней имеют округлую головку и сверху вся матрица датчиков закрыта эластичной пленкой 13, которую можно легко заменять и дезинфицировать.
Для уменьшения трения поворотные платформы катаются на шариках, размещенных в желобах в опорной и базовой платформах, имеющих вид дуг окружностей с центром, совпадающим с центром вращения поворотной платформы. Аналогичным образом, на шариках, размещенных в продольных желобах, сделанных в подвижной базовой платформе и в основании опорной платформы, происходит линейное перемещение подвижной базовой платформы.
Ортопедический диагностический комплекс работает следующим образом.
Пациент становится обеими ногами на опорные площадки 4 таким образом, чтобы стопы не выступали за края площадок, и принимает естественную позу, раздвигая опорные площадки на удобную дистанцию и поворачивая их на удобный для стояния угол (эти параметры при необходимости могут выставляться врачом принудительно).
Под действием веса пациента ферромагнитные подвижные стержни 17 совмещенных датчиков, образующих измерительную матрицу, перемещаются в соответствии с рельефом подошвенной части стопы. При этом вследствие малой жесткости пружин 21 на ненагруженных участках стопы конические пружины 22 не деформируются, а следовательно, соответствующие датчики давления дают нулевые показания, так как нижние торцы подвижного сердечника 17 находятся за пределами зоны чувствительности обмотки 20. Под нагруженными участками стопы пружины 21 сжимаются до предела, после чего начинают сжиматься более жесткие пружины 22. При этом нижний торец стержня 17 входит в зону чувствительности обмотки 20, вследствие чего увеличивается индуктивная связь между обмоткой 20 и обмоткой 19 и в обмотке 20 наводится ЭДС, примерно пропорциональная дальнейшему перемещению (приближению) ферромагнитного стержня 17 к обмотке 20. Весь диапазон чувствительности обмотки 20 к изменению положения стержня 17 должен соответствовать диапазону деформации конической пружины 22 (2-3 мм). Ввиду большого различия между жесткостью пружин 21 и 22 весь вес пациента будет распределяться только на опорные участки стопы.
Обмотка 19 подключается к генератору синусоидального тока, частота которого подбирается таким образом, чтобы обеспечить максимальную чувствительность обмотки 19 к вертикальному перемещению ферромагнитного стержня 17 в ненагруженных датчиках и обмотки 20 к дальнейшему перемещению стержня 17 в нагруженных датчиках. Экспериментальные исследования показали, что оптимальная частота возбуждения датчиков перемещения составляет 5-8 KHz при диаметре стержня 2-2,5 мм. Обмотка датчика перемещения работает в режиме заданного тока, а обмотка 20 является вторичной обмоткой воздушного трансформатора, первичной обмоткой которого является обмотка 19. При этом, пока ферромагнитный стержень 17 находится далеко от обмотки 20, индуктивная связь между обмотками очень слабая и сигнал, наводимый в обмотке 20, близок к нулю. Но когда пружина 21 полностью сжимается, торец ферромагнитного стержня 17 входит в зону чувствительности обмотки 20, индуктивная связь между обмотками начинает возрастать и сигнал, наводимый в обмотке 20, увеличивается пропорционально дальнейшему перемещению ферромагнитного стержня 17.
Обмотки датчиков с помощью блока 7 аналоговых коммутаторов поочередно подключаются к генератору 8 синусоидального тока и измерительному блоку 9, содержащему усилитель, детектор и аналого-цифровой преобразователь. Быстродействие АЦП, аналоговых коммутаторов и всех остальных элементов выбирается таким, чтобы цикл опроса всех датчиков обеих матриц, а также датчиков угловых и линейных перемещений опорных площадок, не превышал 1 с.
Далее эти сигналы уже в цифровом виде через интерфейсный модуль 10 поступают в персональную ЭВМ 3.
Вся дальнейшая обработка полученной измерительной информации производится ЭВМ программным путем.
Прикладное программное обеспечение ортопедического диагностического комплекса должно обеспечивать:
1. Построение трехмерного изображения рельефа поверхности стоп и профилей его сечений при произвольном расположении вертикальных секущих плоскостей в задаваемом масштабе с одновременной индикацией цифровых значений величин просвета между опорной плоскостью и сводом стопы в месте расположения курсора.
2. Построение масштабных изображений опорных участков поверхностей стоп с изолиниями равного давления и раскраску их по 10 градациям (с шагом изменения давления 10% от максимального значения).
3. Вычисление и изображение на построенных картах давлений каждой стопы проекций геометрических центров давлений каждой ноги и общего центра масс (ОЦМ) всего тела.
4. Построение и изображение продольных осей стоп и индикация числового значения их углов, а также расстояния между центрами вращения стоп.
5. Вычисление и индикация (в цифровом виде) динамических параметров девиации проекций на опорную плоскость центров тяжести каждой ноги и ОЦМ (амплитуда и период колебаний, усредняемые за заданный интервал времени).
6. Запоминание и кратковременное (для визуального анализа по экрану) или длительное хранение (архивирование) любых кадров изображения и дополнительных сведений (данные пациента), вводимых с клавиатуры.
Кроме того, программное обеспечение включает в себя модуль управления аппаратными средствами комплекса (блоком аналоговых коммутаторов и измерительным блоком).
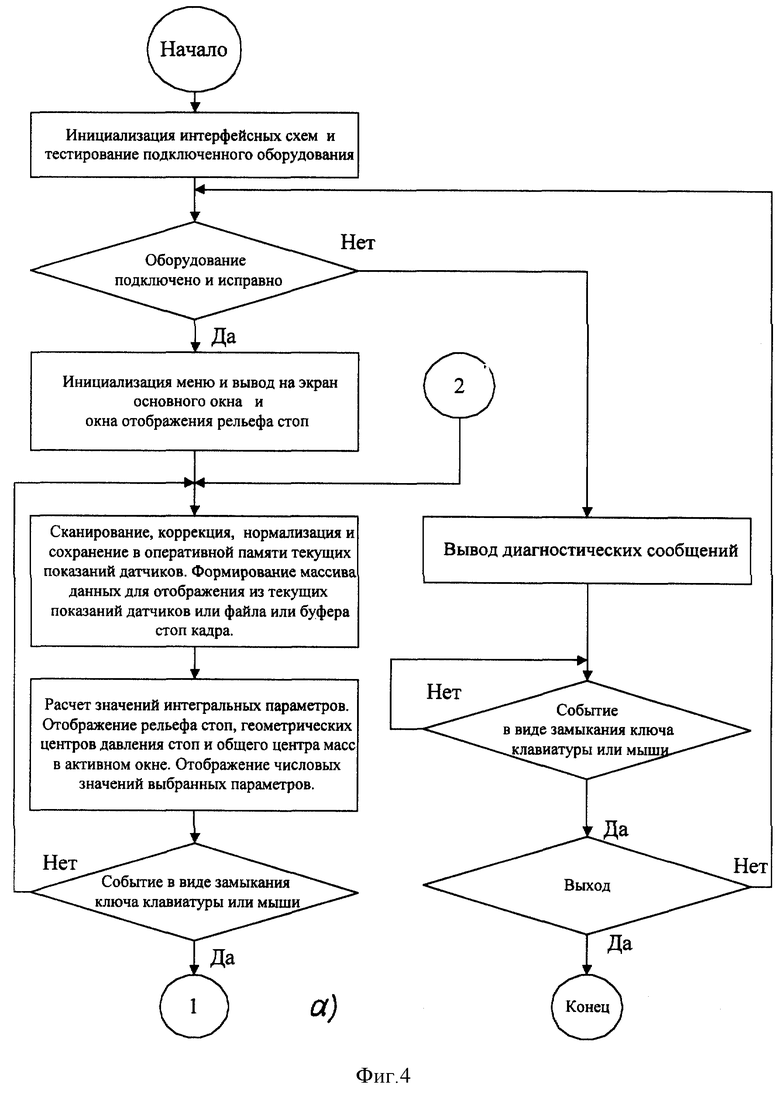
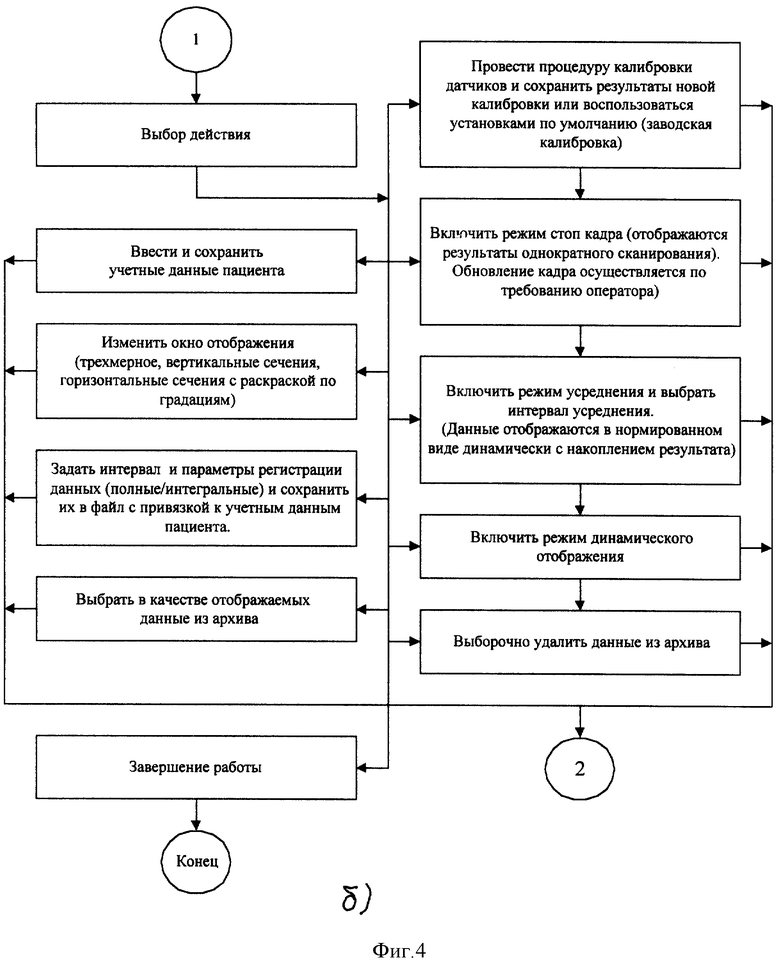
Укрупненная блок-схема пакета специального программного обеспечения комплекса представлена на фиг.4.
Очевидно, что данный комплекс позволяет легко зафиксировать и измерить числовые значения характеристики ненагруженной стопы.
Измерение характеристик ненагруженных стоп (при этом измеряется только профиль нижней поверхности стопы) позволяет получить дополнительную диагностическую информацию. Особый интерес представляет выявление изменений профиля стопы под нагрузкой, которое легко получить путем сопоставления профилей стопы без нагрузки и под нагрузкой.
Для измерения профиля ненагруженной стопы пациент должен перенести весь вес своего тела на одну ногу, не убирая с опорной площадки вторую. Удостовериться в том, что вторая нога не нагружена, можно по показаниям датчиков давления соответствующей опорной площадки, которые должны быть нулевыми. В этом случае, очевидно, будут работать только датчики вертикального перемещения, фиксируя профиль нижней поверхности ненагруженной стопы, т.к. при этом будут сжиматься (в соответствии с профилем стопы) только верхние пружины малой жесткости. Для одновременного измерения профилей обеих стоп без нагрузки пациента можно посадить на расположенный рядом с опорной платформой стул, не убирая его ног с опорных площадок.
Существенными отличительными признаками предлагаемого устройства являются:
- использование под каждую стопу сгруппированных в матрицы прямоугольной формы совмещенных преобразователей вертикального перемещения и механического давления, которые поочередно опрашиваются с помощью программно-управляемого блока аналоговых коммутаторов;
- использование поворотных (в горизонтальной плоскости) опорных площадок с датчиками угла поворота;
- обеспечение возможности линейного перемещения одной из опорных площадок и установка датчика ее перемещения;
- обеспечение автоматического ввода всей измеренной информации в ЭВМ с циклом опроса всех датчиков, обеспечивающих представление информации в реальном масштабе времени.
Все это обеспечивает возможность автоматического расчета и наглядного представления на дисплее ЭВМ трехмерных изображений рельефа стоп, карты распределения давления на опорных участках поверхности стоп, совмещенных с последними изображениями проекций на опорную плоскость центров тяжестей каждой ноги и общего центра масс тела, изображений профилей рельефа стоп при произвольном расположении вертикальной секущей плоскости, индикации в цифровом виде динамических параметров проекций на опорную плоскость центров тяжестей каждой ноги и общего центра масс и других цифровых данных; автоматическое измерение в цифровом виде расстояний между двумя любыми произвольно расположенными точками на изображениях стоп, помеченных курсорами, произвольно перемещаемыми по экрану оператором.
Литература.
1. Ситенко А.Н., Прозоровский В.Ф., Зарудный С.С., Маевский B.C. Устройство для изготовления негативной модели подошвенной области стопы. Авт. свид. СССР, 1509037, 1987.
2. Нагибин В.И., Дюсенбаев К.А. Способ исследования опорной функции стопы и устройство для его осуществления. Авт. свид. СССР 1814877, 1991, опубл. Б.И. 18, 1993.
3. Волковицкий В.Р., Соколовский М.И., Агеев А.Ф., Еремина Е.С. Устройство для определения давления тела человека на опорные поверхности. Авт. свид. СССР, 1507327, 1987. Опубл. Б.И. 34, 1989.
4. Клиническая биомеханика/Под ред. В.И. Филатова. - Л.: Медицина, 1980. - 200 с.
5. Волков С.В., Митрофанов О.П., Васильев А.А. Стабилограф. Авт. свид. СССР 1457896, 1987. Опубл. Б.И. 6, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ МАССАЖНОЙ ОРТОПЕДИЧЕСКОЙ СТЕЛЬКИ | 1995 |
|
RU2094030C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОРТОПЕДИЧЕСКИХ СТЕЛЕК | 1994 |
|
RU2085156C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| СИСТЕМА ДИАГНОСТИКИ ОПОРНО-ДВИГАТЕЛЬНОЙ ФУНКЦИИ ЧЕЛОВЕКА | 1996 |
|
RU2116046C1 |
| СПОСОБ ОЦЕНКИ РЕЗУЛЬТАТОВ РЕАБИЛИТАЦИОННЫХ МЕРОПРИЯТИЙ У БОЛЬНЫХ С ПОСЛЕДСТВИЯМИ ГЕМОРРАГИЧЕСКОГО ИНСУЛЬТА ИЛИ АМПУТАЦИОННЫМИ КУЛЬТЯМИ НИЖНИХ КОНЕЧНОСТЕЙ ПОСЛЕ ПРОТЕЗИРОВАНИЯ | 2013 |
|
RU2547611C1 |
| СПОСОБ ПРОВЕДЕНИЯ ОРТОПЕДИЧЕСКИХ ИЗМЕРЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2137444C1 |
| УСТРОЙСТВО ДЛЯ ТРЕХПЛОСКОСТНОЙ ОЦЕНКИ СОСТОЯНИЯ СТОП И ПРОВЕДЕНИЯ ФУНКЦИОНАЛЬНЫХ ПРОБ | 2007 |
|
RU2382599C2 |
| Способ и устройство для диагностики и коррекции опорной дисфункции | 2018 |
|
RU2705232C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2177249C2 |
Изобретение относится к медицинской технике, а именно к ортопедической диагностике, и может быть использовано при диагностическом обследовании пациентов. Технический результат изобретения состоит в возможности в реальном масштабе времени получать трехмерное изображение рельефа подподошвенной части обеих стоп в нагруженном состоянии (при стоянии) и карту распределения давления на нагруженных участках стоп с одновременным указанием количественной информации, отражающей как геометрические характеристики нижней поверхности стоп, так и локальные давления на их отдельных участках. Автоматически вычисляются и индицируются на картах распределения давлений положение продольных осей обеих ступней и угол между ними, расстояние между центрами обеих ступней, положение проекций центров тяжести каждой ноги и общего центра масс тела на опорную плоскость и динамические характеристики их девиаций (амплитуда и период колебаний, усредненные за заданный промежуток времени) при спокойном состоянии пациента. Результат достигается путем использования совмещенных преобразователей вертикального перемещения и давления, сгруппированных в прямоугольные матрицы, образующие опорные площадки под каждую ступню. Совмещенные преобразователи вертикального перемещения и давления индуктивно-трансформаторного типа имеют единый подвижный ферромагнитный сердечник в виде цилиндрического стержня с закругленной верхней головкой, подпружиненного двумя пружинами: верхней с большим диапазоном деформации и малой жесткостью и нижней с малым диапазоном деформации и большой жесткостью, разделенных шайбой, и единый каркас из диэлектрического материала, на котором размещены две геометрически разделенные обмотки, и по осевой плоскости которого может свободно перемещаться подвижный сердечник. 1 з.п. ф-лы, 4 ил.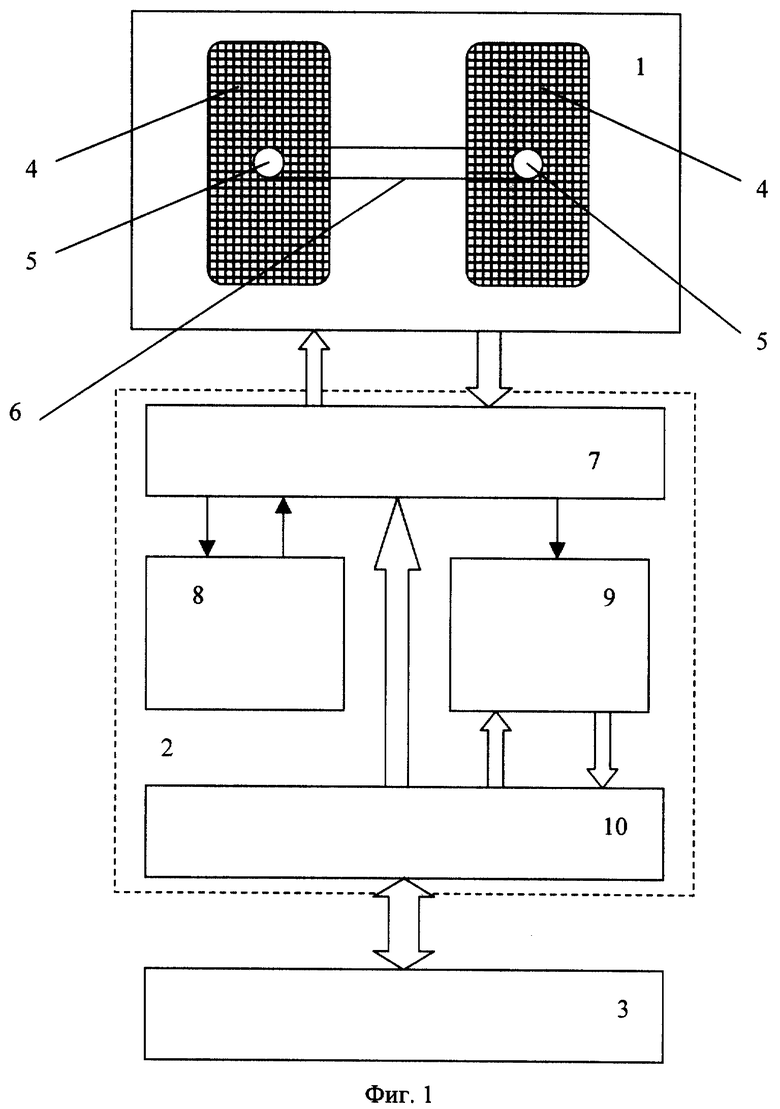
| Стабилограф | 1987 |
|
SU1457896A1 |
| Способ исследования опорной функции стопы и устройство для его осуществления | 1991 |
|
SU1814877A1 |
| Клиническая биомеханика/ Под ред | |||
| В.И.Филатова | |||
| - Л.: Медицина, 1980, 200 с. | |||
