Изобретение относится к области управления космическими аппаратами (КА) и может быть использовано в системах ориентации спутника Земли.
В первый момент после отделения КА от носителя КА произвольно вращается вследствие возмущения-толчка.
Операция начальной ориентации предъявляет специфические требования как к датчикам, так и к устройству управления. Поэтому часто для нее используется свой комплект приборов.
Известен способ демпфирования колебаний КА [1] на базе релейной системы, включающей в себя свободный гироскоп, усилитель ОС, реле, электромагнитный клапан и реактивные двигатели.
Способ заключается в том, что управляющий момент, создаваемый реактивными двигателями, формируется на основании сигналов свободного гироскопа за счет включения и выключения двигателей с помощью электромагнитного клапана, работой которого управляет трехпозиционное реле.
Основными недостатками данного способа являются значительный расход топлива, необходимость организации закона управления по углу и угловой скорости отклонений КА для обеспечения устойчивости системы, т.е. велика степень сложности и значительны габариты системы.
Известны способы [2] начальной солнечной ориентации космических аппаратов на базе специальной подсистемы начальной ориентации, в состав которой входят: оптический датчик Солнца, датчики угловых скоростей (ДУС), устройство управления. В качестве исполнительных органов используются газореактивные сопла. Способы отличаются друг от друга не только последовательностью операций, но и используемой при этом аппаратурой. Критериями для сравнительной оценки различных схем солнечной ориентации могут служить их эксплуатационные характеристики: время, затрачиваемое на полный цикл начальной солнечной ориентации, расход сжатого газа во время этой операции, сложность технической реализации системы, надежность выполнения операций.
Сложность технической реализации системы можно охарактеризовать потребным комплектом приборов. Требование к надежности выполнения операции начальной выставки очень велики, т. к. от успешности ее часто целиком зависит возможность функционирования КА.
Выделяют следующие классы возможных схем солнечной ориентации:
1) Схемы параллельного приведения (одновременно по двум осям), использующие сигналы угловой скорости КА ωx, ωy, ωz от 3-4 ДУСов и два направляющих косинуса для единичного вектора, направленного на Солнце.
2) Схемы последовательного приведения, использующие сигналы угловой скорости ωx, ωy, ωz от 3 ДУСов, и сигналы присутствия Солнца в ограниченном поле зрения.
3) Схемы с ограниченным использованием ДУС:
а) схемы, использующие сигналы о положении Солнца и сигнал об угловой скорости вращения КА только вокруг "солнечной" оси ωx;
б) схемы, использующие только угловую информацию.
Известен способ [2] , принятый в качестве прототипа, демпфирования начальных колебаний КА, заключающийся в том, что силовой гиростабилизатор решает данную задачу с помощью реактивных двигателей, образующих внешние тормозящие моменты вокруг осей аппарата, для которых он служит командным чувствительным устройством - двухкомпонентным датчиком угловой скорости.
В работе [2] показано, что углы поворота гироскопа вокруг осей карданова подвеса дают информацию о проекциях угловой скорости аппарата, т.е. подтверждается возможность использования гироскопического стабилизатора как двухкомпонентного датчика угловой скорости, способного управлять реактивными двигателями, создающими тормозящие моменты вокруг осей аппарата.
Целью изобретения является упрощение законов управления и технической реализации системы начальной ориентации космических аппаратов.
Поставленная цель достигается за счет определения соответствия между положениями устойчивого равновесия трехстепенного гироскопа (ТГ), находящегося на упорах, и соотношением величин и знаков проекций угловых скоростей КА на оси связанной с КА системы координат в случае, когда угловые скорости КА превышают диапазон измерений ТГ.
Ни в одном из известных технических решений не выявлены признаки, сходные с признаками предлагаемого способа. Это позволяет сделать вывод о том, что предлагаемый способ обладает существенными отличиями.
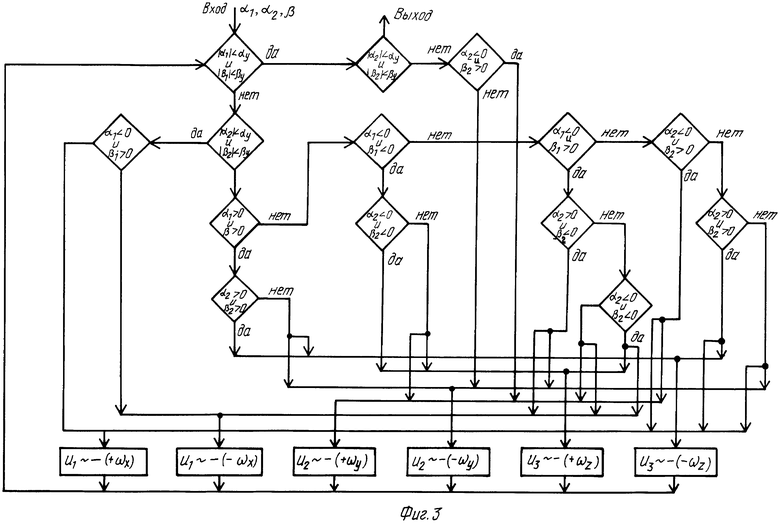
Способ поясняется чертежами, где на фиг.1 показаны все возможные случаи устойчивого равновесия гироскопа на упоре. На фиг.2 показана связанная с корпусом КА система координат и векторы угловых скоростей рамок ТГ. На фиг.3 приведен алгоритм обработки информации о знаках проекций угловых скоростей КА на оси связанной системы координат.
Способ реализуется следующим образом. Положение ТГ на упорах упорах и, следовательно, знаки сигналов с датчиков углов ТГ определяются направлением вращения КА относительно осей связанной с КА системы координат и соотношением модулей угловых скоростей,
Как видно из фиг.1, положение упора ТГ под воздействием угловых скоростей, превышающих предельные значения, имеет определенную закономерность.
При различных комбинациях модулей и знаков угловых скоростей движения КА, превышающих предельные значения, приводит к одному и тому же состоянию. Например, к состоянию +αy и βy приводят следующие случаи: - ωx; - ωx+ωz; - ωx-ωz при |-ωz| ≫ |ωx|.
Совершенно очевидно, что во всех этих случаях присутствует угловая скорость -ωx.
Подобные закономерности можно выделить и во всех остальных состояниях. На этом и основан способ успокоения объекта при работе ТГ на упорах.
Способ поясняется алгоритмом, приведенным на фиг.3.
Каждому устойчивому положению ТГ на упорах соответствует доминирующая над остальными угловая скорость КА. Для первого квадранта, соответствующего положительным сигналам с датчиков угла ТГ (+αy, +βy), доминирующей является отрицательная угловая скорость -ωx относительно оси Х КА, для второго квадранта (+αy, -βy), - положительная угловая скорость +ωz относительно оси Z КА, для третьего квадранта (-αy, -βy) - положительная угловая скорость +ωx относительно оси Х КА, для четвертого квадранта (-αy, +βy) отрицательная угловая скорость -ωz относительно оси Z КА.
Первоначально осуществляется компенсация доминирующей угловой скорости КА. После компенсации доминирующей угловой скорости ТГ занимает новое положение устойчивого равновесия, которое определяется оставшейся из измеряемых данных ТГ угловой скоростью. Компенсация оставшейся угловой скорости продолжается до возвращения ТГ с упоров в рабочую зону.
Теоретические предпосылки возможности создания алгоритма демпфирования колебаний объекта по сигналам ТГ, находящегося на упорах
Известно, что при вращении основания, на которое устанавливается ТГ (в данном случае основанием ТГ является КА) с угловыми скоростями, превышающими диапазон измерения ТГ, имеет место "выбивание" ТГ. Покажем, что в этом случае показание ТГ можно использовать для демпфирования колебаний КА.
Уравнения движения ТГ в кардановом подвесе имеют вид [3]:

где A, C, A1, B1, C1, A2 - моменты инерции соответственно ротора гироскопа, внутренней и наружной рамок карданова подвеса;
ω - угловая скорость вращения ротора; абсолютная угловая скорость вращения внутренней рамки;
абсолютная угловая скорость вращения внутренней рамки; абсолютная угловая скорость вращения внутренней рамки;
абсолютная угловая скорость вращения внутренней рамки;
Lζ- момент внешних сил относительно оси вращения ζ наружного кольца;
LN - момент внешних сил относительно оси вращения N внутреннего кольца.
Для гироскопа типа ГПА приняты следующие обозначения:
Iэ - экваториальный момент инерции ротора ТГ;
Н - кинетический момент ТГ;
βy - предельный утоп отклонения внутренней рамки, ограниченный упором;
αy- предельный угол отклонения наружной рамки, ограниченный упором; вектор абсолютной угловой скорости объекта,
вектор абсолютной угловой скорости объекта,
Ω - вектор абсолютной угловой скорости гироскопа относительно инерциального пространства;
Мх, Мz - моменты, действующие по осям ТГ.
Учитывая принятые обозначения, пренебрегая моментами инерции рам и считая углы отклонения гироскопа малыми, уравнения движения гироскопа можно записать в виде:
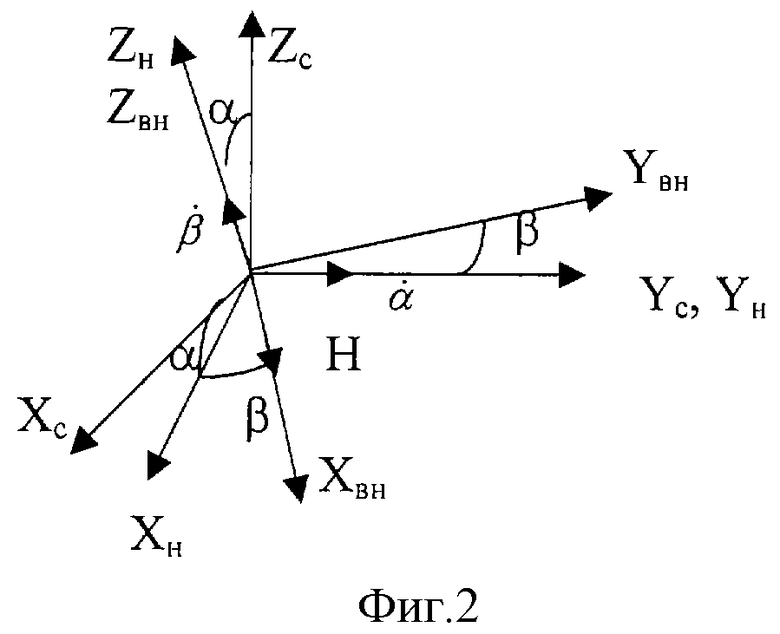
Взаимное расположение осей КА и ТГ ГПА показано на фиг.2, где введены следующие обозначения:
XcYcZc - оси, связанные с КА;
ХвнУвнZвн - оси, связанные с внутренней рамкой;
XнYнZн - оси, связанные с наружной рамкой.
Из фиг. 2 получаем выражения абсолютной угловой скорости гироскопа при замкнутых обратных связях:
Таким образом, уравнение движении ТГ типа ГПА на подвижном КА при замкнутых обратных связях в соответствии с фиг.2 имеют вид:

Для случая ωx= const, ωy= const, ωz= const уравнения имеют вид:

Пренебрегая влиянием угловой скорости ωy, направленной по оси кинетического момента гироскопа для малых углов α и β и учитывая, что
Mz= -kα,
Mx= -kβ,
где k - коэффициент передачи в цепях коррекции гироскопа, получим
В нормальном режиме работы гироскопа, т.е. |α| < αy и |β| < βy ограничимся рассмотрением прецессионных уравнений
откуда
или при переходе на картинную плоскость
При отделении КА от носителя угловые скорости КА могут достигать значительных величин, которые превышают диапазон измерения ТГ. Известно, что при этом происходит "выбивание" ТГ, т.е. ТГ касается сначала одного, а затем другого упора, после чего занимает положение устойчивого равновесия.
Определим соотношение между угловыми скоростями объекта и положениями устойчивого равновесия гироскопа.
Допустим, что ωz> 0, ωx>0 и |ωz| > |ωx|. В момент касания упоров t=t1; 
Начальные условия для второго участка движения определим при t=t1:
Интегрируя уравнения движения гироскопа с учетом полученных начальных условий, будем иметь:
Для момента времени t1 можно записать:
откуда

откуда
Таким образом, при касании стенки упора βy наблюдается равномерное движение ТГ вокруг оси X, причем α > 0 до касания упора αy.
В момент времени t= t2 ТГ займет устойчивое положение равновесия.
ТГ займет устойчивое положение равновесия.
При этом уравнения движения гироскопа примут вид:
Hωx= -kαy+M
Hωz= -kβy+M
т.е. гироскопические моменты в положении αy и βy уравновесятся моментами реакций опор и ТГ будет совершать в инерциальном пространстве принудительное вращение со скоростями +ωx и +ωz.
Технический эффект предлагаемого изобретения заключается в том, что использование предложенного способа исключает необходимость использования дополнительной аппаратуры для режима начальной ориентации КА.
Литература
1. Алексеев К. Б. , Бебенин Г.Г. Управление космическими летательными аппаратами. М., Машиностроение, 1974 г.
2. Раушенбах Б. В., Токарь Е.Н. Управление ориентацией космических аппаратов. Издательство "Наука", главная редакция физико-математической литературы, М., 1974 г.
3. Николаи Е.Л. Гироскоп в кардановом подвесе. Изд. 2-е, М., Наука, 1964 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2012 |
|
RU2498216C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПУТЕВОЙ СИСТЕМЕ КООРДИНАТ С ПРИВОДОМ ПОВОРОТА АППАРАТУРЫ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497728C2 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| СПОСОБ ИНЕРЦИАЛЬНОГО АВТОСОПРОВОЖДЕНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2498193C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2004 |
|
RU2280840C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2204806C1 |
Изобретение предназначено для использования в области управления космическими аппаратами, в системах ориентации спутника Земли. Технический результат - упрощение законов управления и технической реализации системы начальной ориентации космических аппаратов. Способ заключается в демпфировании начальных колебаний космического аппарата по сигналам гироскопа. Расчетным путем определяют соответствие между положениями устойчивого равновесия гироскопа на упорах и соотношением величины и знаков угловых скоростей аппарата. Для каждого устойчивого положения гироскопа на упорах выделяют доминирующую угловую скорость. Компенсируют эту скорость по сигналам с датчиков углов гироскопа с помощью бортовой вычислительной машины и исполнительных органов системы ориентации, после чего гироскоп занимает новое положение устойчивого равновесия в соответствии с оставшейся нескомпенсированной угловой скоростью, которую аналогично компенсируют по сигналам с датчиков углов гироскопа до выхода гироскопа в рабочую зону. 3 ил.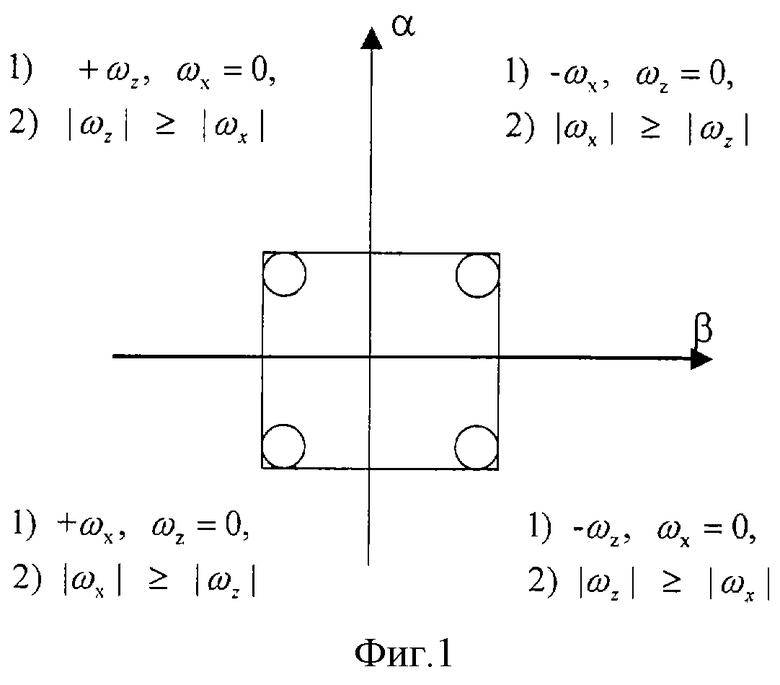
Способ начальной ориентации космического аппарата, заключающийся в демпфировании начальных колебаний космического аппарата по сигналам гироскопа, отличающийся тем, что расчетным путем определяют соответствие между положениями устойчивого равновесия трехстепенного гироскопа на упорах и соотношением величин и знаков угловых скоростей космического аппарата и для каждого устойчивого положения трехстепенного гироскопа на упорах выделяют доминирующую угловую скорость, компенсируют эту скорость по сигналам датчиков углов трехстепенного гироскопа с помощью бортовой вычислительной машины и исполнительных органов системы ориентации, после чего трехстепенный гироскоп занимает новое положение устойчивого равновесия в соответствии с оставшейся нескомпенсированной угловой скоростью, которую аналогично компенсируют по сигналам датчиков углов трехстепенного гироскопа до выхода последнего в рабочую зону.
| РАУШЕНБАХ Б.В | |||
| и др | |||
| Управление ориентацией космических аппаратов | |||
| М.: Наука, 1974, с.499-504 | |||
| СПОСОБ ПОЛУЧЕНИЯ КИСЛОМОЛОЧНОГО ПРОДУКТА С ПРИРОДНЫМ ВИТАМИНОМ К2 (ВАРИАНТЫ) И КИСЛОМОЛОЧНЫЙ ПРОДУКТ, ПОЛУЧЕННЫЙ ДАННЫМ СПОСОБОМ | 2014 |
|
RU2583873C1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| RU 2073211 С1, 10.02.1997. | |||
