Изобретение относится к гироскопическому приборостроению и может быть применено при калибровках (аттестациях, проверках) гироскопов в процессе лабораторных, заводских, приемосдаточных испытаний.
Известен способ калибровки гироскопов на двухосном наклонно-поворотном столе (НПС) [1] в котором выставка гироскопа проводится входной осью по внутренней оси НПС, ориентированной по отвесной линии, а взаимно ортогональную к ней наружную ось НПС выставляют в плоскость местного горизонта, вращают гироскоп на фиксированные углы: на угол α2 вокруг наружной оси НПС и на угол α1 вокруг внутренней оси НПС - таким образом, что для каждого измерительного положения (ИП) существует противоположное ИП, отличающееся значениями угла α2 или обоих углов α1 и α2 на 180 угловых градусов, в ИП измеряют суммарный уход гироскопа и проекцию УССВЗ на входную ось гироскопа, уходы гироскопа определяют по совокупности информации, полученной в ИП с исключением влияния проекции УССВЗ. Очевидно, что для проведения калибровки требуется в процессе измерений задавать значения угла α1(α2), при этом каждому такому значению соответствует противоположное положение α2(α1). Проведение операций по измерению на противоположных направлениях требует точной выставки на углы α1 и α2, отличающиеся от первоначальных на 180°. Погрешность выставки в ИП α1+180° и α2+180° приводит к появлению погрешности в определении составляющих угловой скорости ухода гироскопа. Кроме того, увеличивается время проведения измерений, число ИП, повышается нагрузка на электромеханический привод НПС.
С целью исключения недостатков, присущему известному способу калибровки, предлагается способ калибровки, в котором не требуется проведение измерений на противоположных направлениях в каждом измерительном положении (ИП). Поставленная цель достигается тем, что калибровка гироскопа включает выставку гироскопа на НПС, задание ИП путем вращения НПС на фиксированные углы относительно двух взаимно ортогонально расположенных наружной и внутренней осей, проведение измерений входных сигналов гироскопа в каждом ИП, определение составляющих ухода гироскопа по совокупности информации, полученной в процессе измерения входных сигналов гироскопа. При этом выставка гироскопа проводится входной осью по внутренней оси НПС, ориентированной по отвесной линии, а взаимно ортогональную к ней ось НПС выставляют в плоскости первого вертикала, ортогонально плоскости меридиан вращают гироскоп на фиксированные углы: на угол α2 вокруг наружной оси НПС и на угол α1 вокруг внутренней оси НПС, в каждом ИП измеряют суммарный уход гироскопа и проекцию угловой скорости суточного вращения Земли (УССВЗ) на входную ось гироскопа, уходы определяют по совокупности информации, полученной в ИП с исключением влияния УССВЗ.
При задании ИП углы α1 и α2 принимают следующие значения:
где  ,
,  - начальные значения углов соответственно,
- начальные значения углов соответственно,  ,
,  - значения углов α1, α2 в других ИП.
- значения углов α1, α2 в других ИП.
Сравнительный анализ с известными техническими решениями показал, что новый способ отличается:
- выставкой взаимно ортогональной входной оси гироскопа наружной оси НПС в плоскость первого вертикала - ортогонально плоскости меридиана;
- отсутствием требований к проведению измерений в ИП таким образом, чтобы для каждого ИП существовало бы противоположное ИП, отличающееся значениями угла α2 или обоих углов α1, α2 на 180°;
- сокращением числа ИП, экономией ресурса электрического привода.
Следовательно, прелагаемый способ соответствует критерию «новизна». В результате реализации предложенного способа повышается точность калибровки, снижается трудоемкость проведения работ.
Существо предлагаемого способа калибровки поясняется следующим. Рассмотрим модель ухода гироскопа, коэффициенты которой наблюдаемы в поле тяжести Земли.

где ω - суммарный уход гироскопа;
ωX, ωY, ωZ - зависящие в первой степени от перегрузки составляющие ухода гироскопа;
ωXYηXηY+ωXZηXηZ+ωYZηYηZ+ωYYηY 2+ωZZηZ 2 - зависящие во второй степени от перегрузки составляющие ухода гироскопа;
ηX, ηY, ηZ - проекции единичной перегрузки на оси, связанные с гироскопом;
ОХ - выходная ось, OY - входная ось; OZ - ось собственного вращения гироскопа.
VBX - проекция вектора УССВЗ на входную ось гироскопа.
Данная модель показывает взаимосвязь суммарного ухода гироскопа с девятью составляющими ω0, ωX, ωY, ωZ, ωXY, ωXZ, ωYZ, ωYY, ωZZ и инструментальными погрешностями калибровки гироскопа, возникающими из-за действия на входную ось гироскопа проекции УССВЗ.
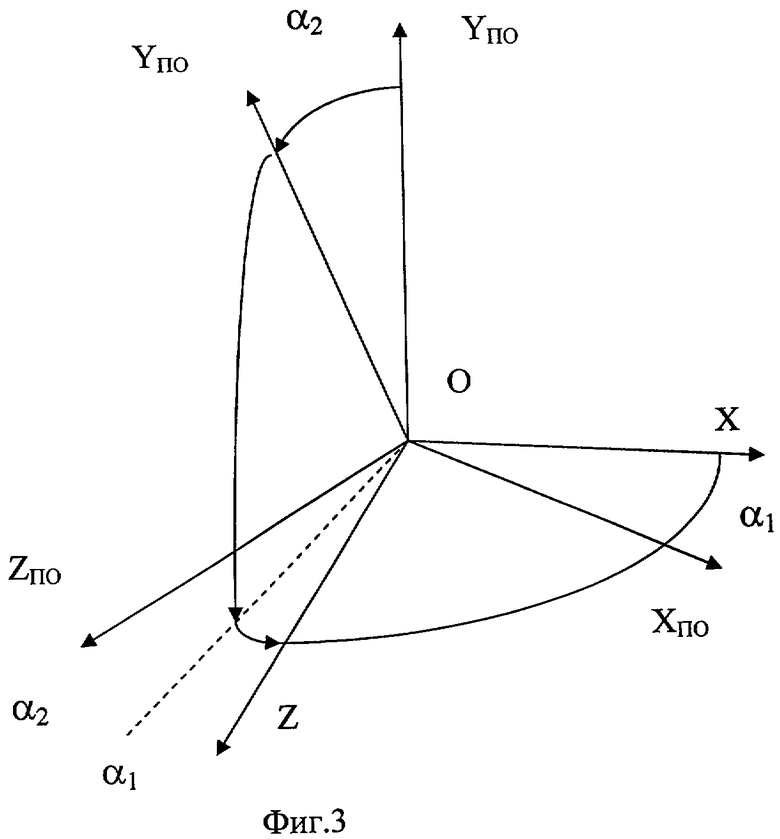
Примем, что калибровка проводится на НПС, показанном на фиг.1. Угол α1 - угол вращения гироскопа вокруг внутренней оси НПС, угол α2 - угол вращения гироскопа вокруг наружной оси НПС.
Положение гироскопа на НПС в начальный момент времени показано на фиг.2, где изображены ортогональный трехгранник (ТГ) XПОYПОZПО, моделирующий исходное положение осей НПС и географический ТГ NLE. Ось ON географического ТГ ориентирована на Север, ось ОЕ на Восток, ось OL противоположно направлению отвесной линии. Плоскость ZПОOYПО трехгранника XПОYПОZПО выставлена в горизонт, так что ось ОХПО выставлена в плоскость первого вертикала - ортогонально плоскости меридиана, при этом ее азимутальная выставка, задаваемая углом А (азимут оси ОХПО) относительно географического ТГ NLE составляет 90°, ϕ - широта места установки, g - вектор силы тяжести, V - вектор УССВЗ, VL, VN - вертикальная и горизонтальная составляющая УССВЗ соответственно. Угловое положение гироскопа в ходе калибровки по предлагаемому способу иллюстрируется на фиг.3., где показаны трехгранник XПОYПОZПО, характеризующие исходное положение НПС, трехгранник XYZ, связанный с исследуемым гироскопом в процессе калибровки. При проведении калибровки гироскоп поворачивают вокруг наружной оси НПС ОХПО на угол α2 и вокруг внутренней оси НПС OYПО, совпадающей со входной осью гироскопа на угол α1.
Процесс калибровки гироскопа представляет собой последовательное задание наборов углов α1, α2. Установим наборы углов α1(i) и α2(j)  на которых можно провести калибровку гироскопа по предлагаемому способу в соответствии с моделью (1), то есть число различных углов α1(i), α2(j) и их конкретные значения. Из фиг.2, 3 следует, что проекции единичной перегрузки по оси, связанные с гироскопом ηX, ηY, ηZ и проекция вектора УССВЗ на входную ось гироскопа определяются так:
на которых можно провести калибровку гироскопа по предлагаемому способу в соответствии с моделью (1), то есть число различных углов α1(i), α2(j) и их конкретные значения. Из фиг.2, 3 следует, что проекции единичной перегрузки по оси, связанные с гироскопом ηX, ηY, ηZ и проекция вектора УССВЗ на входную ось гироскопа определяются так:

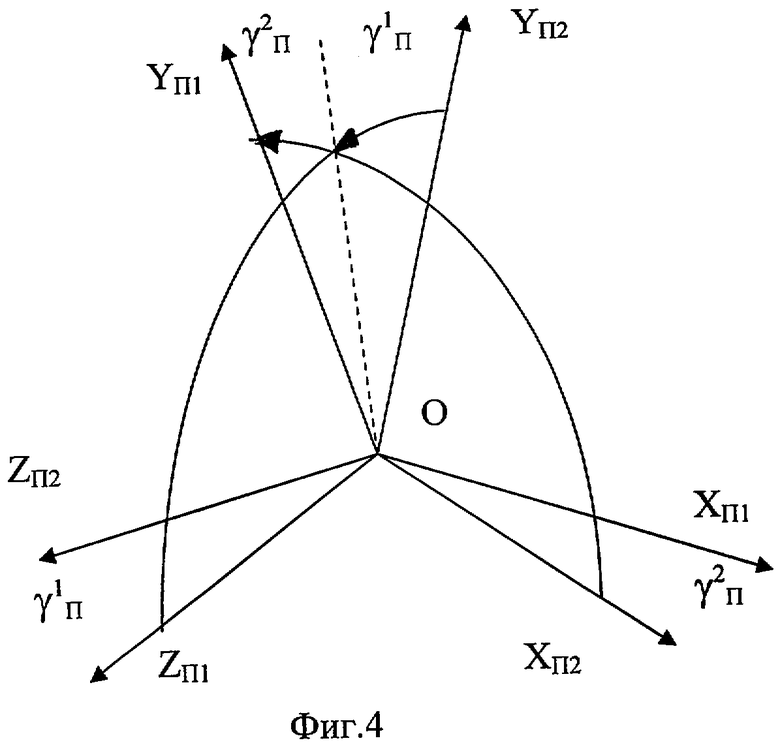
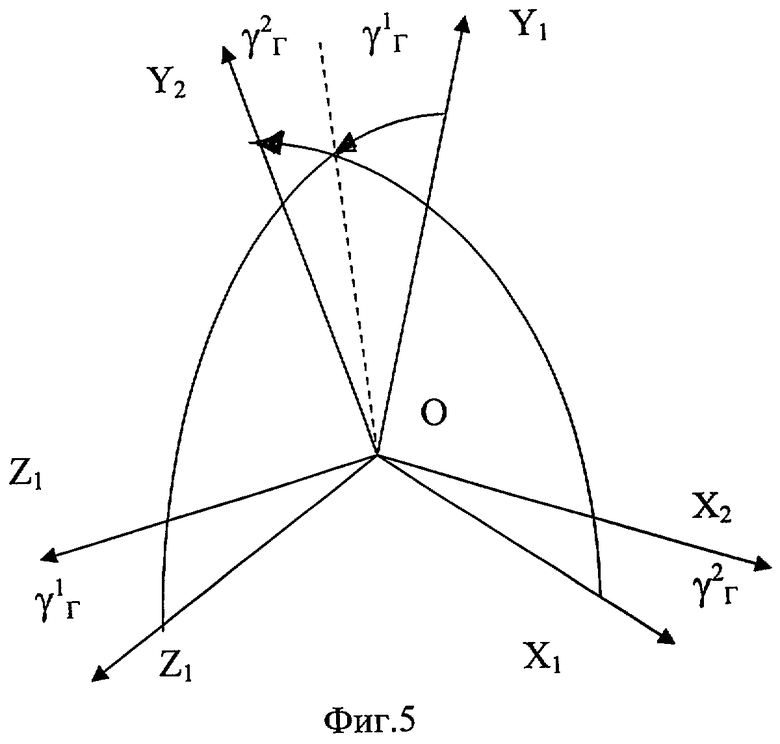
При установке гироскопа на наклонно-поворотном столе будут иметь место ошибки, обусловленные воздействием проекции вектора УССВЗ: перекосы в осях стола, показанные на фиг.4, погрешности установки гироскопа на НПС, показанные на фиг.5. На фиг.4 представлены системы координат OXП1YП1ZП1 и OXП2YП2ZП2, характеризующие наличие перекосов в осях карданова подвеса стола. На фиг.5 представлены системы координат OX1Y1Z1 и OX2Y2Z2, характеризующие наличие перекосов в осях карданова подвеса стола.
При этом из фиг.4, 5 можно показать справедливость следующего соотношения

где:  ,
,  - погрешности установки гироскопа на наклонно-поворотном столе;
- погрешности установки гироскопа на наклонно-поворотном столе;
 ,
,  - перекосы в осях наклонно-поворотного стола.
- перекосы в осях наклонно-поворотного стола.
Используя уравнение (1) и выражения (2), (3) получим уравнение измерений для калибровки гироскопа в режиме датчика угловой скорости (ДУС) при некоторых значениях углов α1(i) и α2(j) из используемых наборов:

где kД - известный масштабный коэффициент ДУС;
I(i,j) - измеренное значение выходного сигнала ДУС в ИП, задаваемое углами α1(i), α2(j);
ηX(i,j), ηY(j), ηZ(i,j) - проекции единичной перегрузки в соответствии с выражениями (2) при α1=α1(i) и α2=α2(j).
Запишем уравнение (1) в векторно-матричной форме

где  - вектор калибруемых параметров, при этом
- вектор калибруемых параметров, при этом  , что следует из формулы (4),
, что следует из формулы (4),
 - матрица измерений размерности 1×5, определяемая тригонометрическими функциями угла вращения α2 вокруг наружной оси карданова подвеса.
- матрица измерений размерности 1×5, определяемая тригонометрическими функциями угла вращения α2 вокруг наружной оси карданова подвеса.
 - матрица измерения 5×12, определяемая тригонометрическими функциями углов вращения вокруг внутренней оси карданова подвеса, представленная на стр.7.
- матрица измерения 5×12, определяемая тригонометрическими функциями углов вращения вокруг внутренней оси карданова подвеса, представленная на стр.7.
ω12(i,j)- измерения в задаче калибровки вектора  .
.
Определим минимальный набор и значения углов α2, достаточных для идентификации вектора с минимальным влиянием измерительного шума на результаты калибровки. Данное условие будет выполняться при максимальном значении детерминанта матрицы М. Структура и вид матрицы  показывает, что минимальное значение углов α2(j), обеспечивающих идентификацию вектора равно пяти и максимальным соответствующего им определителя матрицы наблюдений:
показывает, что минимальное значение углов α2(j), обеспечивающих идентификацию вектора равно пяти и максимальным соответствующего им определителя матрицы наблюдений:
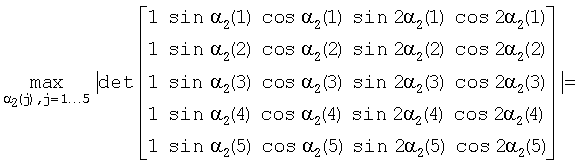

не зависит от выбора первого значения α2 и достигается на следующем наборе углов

Выражение (7) дает оптимальный набор углов α2 в программу калибровки по предлагаемой схеме задания ИП.
Определим оптимальный набор углов α1 для калибровки составляющих по углу α1. Из анализа структуры матрицы очевидно, калибровка составляющих ухода ω0, ωXZ, ωYY, ωZZ будет оптимальной из условий максимума следующего определителя


Максимум в выражении (8) не зависит от выбора значения первого угла α1(1) и достигается на следующем главном наборе углов

Параметры  и ωX, ωY, d будут калиброваться одинаково из условия максимума определителя
и ωX, ωY, d будут калиброваться одинаково из условия максимума определителя

который не зависит от выбора первого значения α1(i) и достигается на следующем наборе углов

Калибровка параметров ωXY, ωYZ осуществляется на наборе углов, который определяется из условия максимума следующего определителя

и достигается на наборе углов

Очевидно, что уравнение (1) может быть записано в иной векторно-матричной форме

где  - вектор калибруемых параметров, аналогичный (4).
- вектор калибруемых параметров, аналогичный (4).
 - матрица измерений размерности 1×5, определяемая тригонометрическими функциями угла вращения α1 вокруг внутренней оси карданова подвеса. Матрица
- матрица измерений размерности 1×5, определяемая тригонометрическими функциями угла вращения α1 вокруг внутренней оси карданова подвеса. Матрица  имеет размерность 5×12 и запишется в виде, представленном на стр.9.
имеет размерность 5×12 и запишется в виде, представленном на стр.9.
Матрица определяется определяемая тригонометрическими функциями угла вращения вокруг наружной оси карданова подвеса.
Нетрудно видеть, что поиск максимума детерминанта матрицы  осуществляется аналогично выражению (6) и набор углов для программы калибровки составит
осуществляется аналогично выражению (6) и набор углов для программы калибровки составит

Определим набор углов α2 в программу калибровки. Для выявления оптимальных углов калибровки составляющих ω0, ωY, d воспользуемся условием максимума определителя подобным (9). По уже известному решению, набор углов по α2 в этом случае составит

Оптимальный набор углов для калибровки, составляющих ωXZ, ωYY, ωZZ, будет определяться из условия максимума следующего определителя

и достигается на следующем наборе углов

Для выявления наилучших условий калибровки, составляющих  , и
, и  , составим следующий определитель
, составим следующий определитель

Максимум определителя (18) не зависит от выбора первого угла и достигается на следующем наборе

Тем самым показано, что удалось найти оптимальные по критерию максимального подавления измерительного шума на результаты калибровки наборы углов α1, α2, позволяющие обеспечить калибровку гироскопа по предлагаемому способу. Установленные наборы углов, определяют следующие оптимальные программы калибровки по предлагаемому способу.
- программы калибровки из 25 ИП, в которых задается значение углов α1, α2, согласно выражениям (7), (9), (11), (13);
- программы калибровки из 30 ИП, в которых задается значение углов α1, α2, согласно выражениям (15), (16), (18), (20).
Синтезированные программы калибровки обладают различной степенью наблюдаемости, избыточности измерений, которую можно использовать для повышения эффективности калибровки гироскопа.
Таким образом, определены оптимальные наборы углов α1, α2, задающие ИП (программы калибровки), на которых обеспечивается полная калибровка гироскопа - определение девяти составляющих ухода, погрешностей, возникающих из-за влияния погрешностей на входную ось гироскопа (погрешностей перекоса в осях подвеса и погрешностей выставки гироскопа на посадочных местах). При этом измеряется суммарный уход гироскопа и проекция УССВЗ на входную ось гироскопа в каждом ИП с учетом влияния УССВЗ на результаты калибровки. Указанный эффект достигается при выставке наружной оси стенда в плоскость первого вертикала, ортогонально плоскости меридиана.
Итак, предложенный способ калибровки гироскопов включает однократную выставку исследуемого гироскопа на двухосном НПС входной осью по внутренней оси НПС, выставку наружной оси НПС в плоскости первого вертикала ортогонально плоскости меридиана, горизонтирование наружной оси НПС, задание нескольких ИП без разворота конструкции в противоположные ИП, измерение суммарного ухода гироскопа и проекции УССВЗ в данных ИП, определение по ним составляющих ухода гироскопа и инструментальных погрешностей, возникающих из-за влияния проекции УССВЗ на входную ось гироскопа.
Способ обеспечивает полную калибровку гироскопа, помимо девяти составляющих ухода, определяются погрешности установки гироскопа на стенде и погрешности перекоса в оси карданова подвеса, снижает количество ИП по сравнению с прототипом, повышает точность измерений по суммарным погрешностям калибровки каждого из параметров, реализуется по программам калибровки из 25 и 30 (две программы калибровки) ИП, без потери отличительных эффективных свойств.
Практическая реализация предлагаемого способа может быть осуществлена на НПС, обеспечивающем задание программы калибровки по предложенному способу, который может быть построен на горизонтально ориентированном двухосном кардановом подвесе, имеющем точные датчики углов по своим осям и углы прокачки ±180°.
Источники информации
1. Патент RU 204806, 2003; G 01 C 25/00
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2204806C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2205367C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 1997 |
|
RU2121134C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ ТРЕХОСНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2599182C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕОРТОГОНАЛЬНОСТИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНОГО ГИРОСКОПА | 2019 |
|
RU2727318C1 |
| СПОСОБ КАЛИБРОВКИ УГЛОВ РАССОГЛАСОВАНИЯ ОСИ ДАТЧИКА УГЛА НЕУПРАВЛЯЕМОГО ГИРОСКОПА ОТНОСИТЕЛЬНО ОСИ ВРАЩЕНИЯ ЕГО КОРПУСА | 2005 |
|
RU2308683C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |

Изобретение может быть использовано при аттестациях, проверках гироскопов в процессе лабораторных, заводских, приемосдаточных испытаний. Гироскоп устанавливают на двухосном наклонно-поворотном столе. Задают несколько измерительных положений путем разворота наклонно-поворотного стола на фиксированные углы таким образом, что в каждом положении измеряют суммарный уход гироскопа и проекции угловой скорости суточного вращения Земли. Определяют составляющие ухода гироскопа с исключением влияния вектора угловой скорости суточного вращения Земли. Техническим результатом является полная калибровка гироскопа, не требующая проведения высокоточных и дорогостоящих измерений широты места, азимутального направления и уклонения отвесной линии, снижение трудоемкости путем сокращения операций точной выставки наружной оси наклонно-поворотного стола ортогонально оси Мира в каждом измерительном положении, повышение точности калибровки путем проведения измерений в оптимальных положениях стола. 5 ил.
Способ калибровки гироскопов, включающий выставку гироскопа на наклонно-поворотном столе, задание измерительных положений путем разворота наклонно-поворотного стола на фиксированные углы относительно двух взаимно ортогонально расположенных наружной и внутренней осей стола, проведение измерений входных сигналов гироскопа в каждом измерительном положении, определение составляющих ухода гироскопа по совокупности информации, полученной в процессе измерения входных сигналов гироскопа, отличающийся тем, что наружную ось наклонно-поворотного стола выставляют в плоскости первого вертикала - ортогонально плоскости меридиана, а выставку гироскопа проводят входной осью по внутренней оси наклонно-поворотного стола, ориентированной по отвесной линии, вращения гироскопа на фиксированные углы задают на угол α2 вокруг наружной оси наклонно-поворотного стола, и на угол α1 вокруг внутренней оси наклонно-поворотного стола, при этом при задании измерительных положений (ИП) углы α1 и α2 принимают значения










где  ,
,  - начальные значения углов α2, α1 соответственно,
- начальные значения углов α2, α1 соответственно,  ,
,  - значения углов α2, α1 в других ИП, или при задании измерительных положений углы α2 и α1 принимают значения
- значения углов α2, α1 в других ИП, или при задании измерительных положений углы α2 и α1 принимают значения












| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2204806C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2205367C1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ГРУЗОВЫХ ТЕЛЕЖЕК С ОДНОГО ПОДВЕСНОГО КОНВЕЙЕРА НА ДРУГОЙ | 0 |
|
SU212134A1 |
| Стенд для испытаний гироскопических приборов | 1990 |
|
SU1820219A1 |
| US 3736791 А, 05.06.1973 | |||
| US 3782167 А, 01.01.1994. | |||

