Предлагаемое изобретение относится к системам автосопровождения заданного объекта визирования (OB), а также к системам самонаведения подвижных носителей с инерциальной измерительной системой, содержащей устройства с изменяющейся ориентацией направленности зеркала антенны, а именно, поворотно-чувствительные устройства, основанные на использовании гироинерциальных датчиков сигналов пространственного перемещения подвижного носителя.
Предлагаемые технические решения предназначены для автосопровождения заданного OB по дальности и по направлению, характеризующегося параметрами инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат при перемещении подвижного носителя и его сближении с заданным OB.
Предлагаемые технические решения могут быть применены:
- в системах автономного (инерциального) самонаведения подвижных носителей на заданный OB;
- в интегрированных комплексированных бортовых системах самонаведения (БССН) в составе систем управления и стабилизации подвижных носителей.
При создании таких систем важной задачей является обеспечение повышенных
- точности инерциального автосопровождения заданного OB на автономном участке траектории самонаведения подвижного носителя, а также точности и, помехоустойчивости локационного автосопровождения OB;
- тактико-технических характеристик интегрированных комплексированных БССН подвижных носителей.
Известны, например, следующие способы формирования сигналов пеленгования и устройства, осуществляющие их, описанные в книге В.М.Артамонова «Следящие системы радиолокационных станций автоматического сопровождения и управления.» - изд. Судостроение: Л; 1968 г. - с.12-35, в которой рассмотрены:
- следящая система радиолокационной станции автоматического сопровождения по направлению с коническим сканированием диаграммы направленности;
- следящая система радиолокационной станции автосопровождения по направлению моноимпульсного типа;
- следящая система радиолокационной станции автоматического автосопровождения по дальности;
- следящие системы в радиолиниях и системах самонаведения;
- следящие системы в радиотеленаведении.
Известны также следующие технические решения:
1. Устройство слежения (JP 3627135 В2 7 G01S 13/66, 09.03.2005), которое «содержит блок 5 для определения разделения цели сопровождения путем измерения величины вектора Ck,j; блок 6 управления параметрами следящего фильтра по результатам блока 5; блок 2 сглаживания для получения вектора Bk(+) и ковариантной матрицы Pk(+) ошибки сглаживания; блок 3 прогнозирования для получения вектора Bk(-) и ковариантной матрицы Pk(-) ошибки прогнозирования; блок 4 для расчета границ сопровождения».
2. Процессор для обработки информации о сопровождении цели (JP 3653216 В2 7 G01S 13/66, 25.05.2005), в котором «процессор 1 один содержит блок 3 для предсказания времени обработки данных сопровождения; блок 4 принятие решения в реальном времени, принимающий решение о сопровождении цели в некоторое заданное время, определяемое блоком 3; блок 5 для временного хранения информации о наблюдаемой цели; блок 6 управления, контролирующий поступление информации о наблюдаемой цели в процессор 1».
3. Следящий координатор цели (RU 2042101 C1 6F41G 7/00, 1995.08.20) «обеспечивает повышение точности измерения угловой скорости вращения вектора дальности объекта до цели и одновременно увеличивает дальность действия радиотехнического и оптического каналов получения сигнала от цели, причем чувствительные к сигналам от цели элементы этих каналов установлены на внутренней рамке гиростабилизированной платформы; блоки анализа обеспечивают подключение выходов указанных каналов на вход усилителя мощности, выходы которого соединены с моментными датчиками гиростабилизированной платформы, внешняя рамка которой установлена в вилке установленной в корпусе объекта с возможностью вращения вокруг продольной оси объекта».
4. Способ наведения летательного аппарата на цель (RU 2204785 С2 7 F41G 7/20 2001.01.15), при котором «предварительно в вычислитель (В) неподвижного пульта управления (НПУ) относительно Земли вводят значения географических координат (ГК) и высоты над уровнем моря (ВУМ) местоположения НПУ. Предварительно в НПУ на летательный аппарат (ЛА) передают по радиолинии (РЛ) значения ГК и ВУМ местоположения НПУ. В процессе наведения с НПУ облучают воздушную цель (ВЦ), на НПУ принимают излучение, отраженное от ВЦ, и в результате обработки принятого излучения измеряют значение дальности от НПУ до ВЦ и значения угла места и азимута направления с НПУ на ВЦ. Измеренные значения вводят в В НПУ и вычисляют приращение ГК и ВУМ местоположения ВЦ относительно местоположения НПУ, а также значения скоростей изменения этих ГК и ВУМ, вводят принятые и измеренные значения в В ЛА, вычисляют значения ошибок навигации (ОН) ЛА на ВЦ, соответствующих заданному методу наблюдения (МН), и создают управляющие воздействия, которые изменяют траекторию полета ЛА таким образом, чтобы ликвидировать ОН ЛА на ВЦ с заданным МН.»
5. Способ наведения летательных аппаратов на наземные объекты (RU 2229671 С1 7 F41G 7/22, 2003.03.05), по которому измеряют скорость летательного аппарата (ЛА), дальность до наземного объекта, угол между направлением вектора скорости ЛА и направлением на заданный объект, а также поперечное ускорение ЛА в горизонтальной плоскости. Формируют сигнал управления горизонтальной плоскости при реализации пропорционального наведения на движущийся в горизонтальной плоскости виртуальный движущийся наземный объект. Начальное положения и параметры движения последнего задаются исходя из условий обеспечения требуемой криво линейной траектории наведения ЛА на реальный наземный объект с помощью бортовых радиолокационных средств, использующих синтезированные апертуры антенны, или доплеровское обужение луча диаграммы направленности антенны.»
6. Способ измерения угловых координат объекта и радиолокационная станция для его реализация (RU2291466 С1 26.05.2005), при котором излучают зондирующие сигналы, производят прием и обнаружение отраженных от объекта сигналов, осуществляют измерение уровней принятых сигналов и измерение угловых координат луча, соответствующих принятым сигналам, формируют двумерные угловые пакеты принятых сигналов, выполняют анализ двумерного углового пакета принятых сигналов на основании которого вычисляют угловые координаты объекта.
Рассмотренные технические решения основаны на радиолокационном контакте с OB, обеспечивают формирование сигналов пеленгования OB на основе обработки принимаемых радиолокационных сигналов, получаемых в результате отражения их от OB облучаемого зондирующими сигналами. Выделение сигналов пеленгования OB не может быть осуществлено при отсутствии радиолокационного контакта с OB.
Таким образом, ни один из рассмотренных аналогов не является близким по технической сущности и не может быть принят в качестве прототипа предлагаемых технических решений.
Целью заявляемых технических решений (способа и системы для его осуществления) является обеспечение инерциального автосопровождения заданного OB с повышенной точностью на автономном инерциальном участке траектории самонаведения подвижного носителя на заданный OB, а также повышенной точности и помехоустойчивости радиолокационного автосопровождения OB.
Сущность изобретения заключается в том, что по предлагаемому способу во время предстартовой подготовки к пуску подвижного носителя определяют и устанавливают сигналы, пропорциональные начальным значениям наклонной дальности L0, угла наклона 

- пеленгов, т.е. угла наклона 

- наклонной дальности L0 до заданного OB и наклонной скорости 
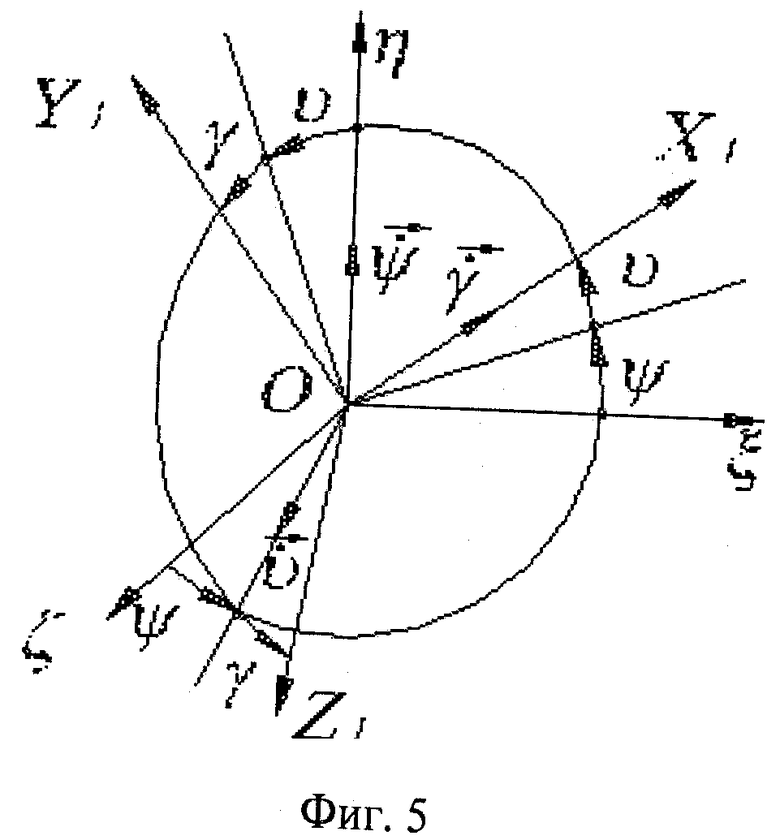
- рыскания Ψ0, тангажа ϑ0 и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5), а также начальные условия выставки инерциального пеленгования заданного OB, т.е. штатные сигналы, пропорциональные начальным значениям;
- проекций 



- декартовых координат ξ0(D0), η0(Н0), ζ0 подвижного носителя в местной горизонтальной системе координат Оξηζ (фиг.1);
- долготы λ0 и географической широты 
Далее проверяют сформированные сигналы в виде пакета последовательных информационных слов на отсутствие в них искажений. После этого сигналы, характеризующие пакет последовательных информационных слов, на борту подвижного носителя преобразуют в параллельную форму для обеспечении формирования сигналов инерциального пеленгования заданного OB. Затем на борту подвижного носителя преобразуют сигналы, пропорциональные начальным условиям выставки инерциального измерителя параметров вектора визирования заданного OB в сигналы, пропорциональные начальным значениям:
- проекций  ,
,  ,
,  вектора
вектора
- углов,  и
и 
- составляющих  ,
,  пространственной угловой координаты
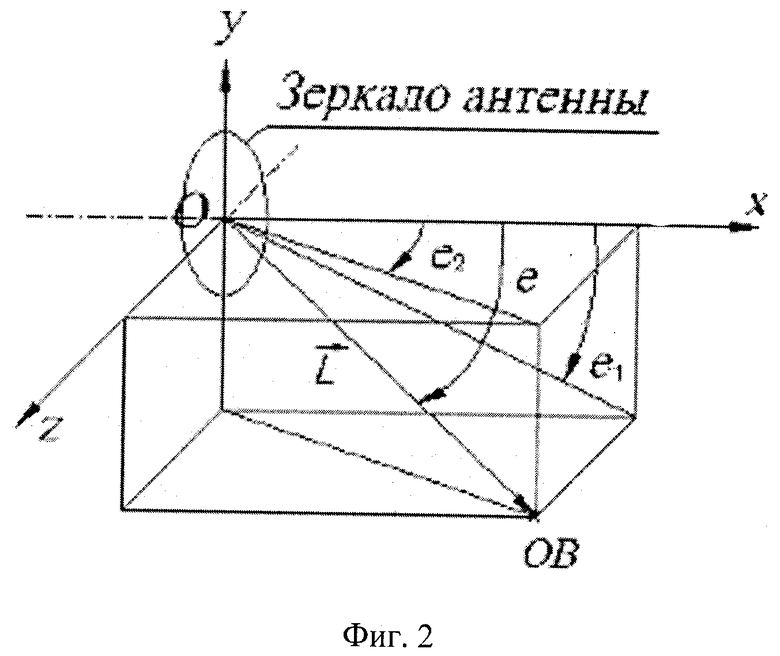
пространственной угловой координаты  заданного OB, т.е. параметров инерциального пеленгования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат Oxyz (фиг.1, фиг.2), которые характеризуют сигналы рассогласования между направлением оптической оси зеркала антенного устройства и направлением не заданной OB в соответствующих плоскостях пеленгования;
заданного OB, т.е. параметров инерциального пеленгования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат Oxyz (фиг.1, фиг.2), которые характеризуют сигналы рассогласования между направлением оптической оси зеркала антенного устройства и направлением не заданной OB в соответствующих плоскостях пеленгования;
- направляющих косинусов 
В момент времени старта подвижного носителя обновление сигналов начального определения и установления координат заданного OB и сигналов начальной выставки инерциального измерения параметров вектора визирования заданного OB (т.е. сигналов начальной информации) прекращают и во время начала его движения по траектории вместе с основанием интегрированного антенного устройства одновременно измеряют сигналы пропорциональные проекциям  ,
,  ,
,  вектора
вектора  кажущегося линейного ускорения движения и проекциям
кажущегося линейного ускорения движения и проекциям  ,
,  ,
,  вектора
вектора 
По этим измеренным сигналам с учетом не линейной зависимости поворота линии (вектора) визирования заданного OB по углу наклона и по азимуту от поворота зеркала антенного устройства соответственно по углу наклона и по азимуту, т.е. с учетом так называемой переменной электрической редукции, определяют сигналы, пропорциональные проекциям nx, ny, nz вектора 
 абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz. Далее формируют по полученным сигналам с учетом сигналов, определенных и установленных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования заданного OB, характеризующиеся:
абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz. Далее формируют по полученным сигналам с учетом сигналов, определенных и установленных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования заданного OB, характеризующиеся:
- проекциями Vx, Vy, Vz вектора
- наклонной дальностью L и наклонной скоростью  сближения с заданным OB основания интегрированного антенного устройства вместе с подвижным носителем;
сближения с заданным OB основания интегрированного антенного устройства вместе с подвижным носителем;
- рассогласованием ΔL между заданным начальным значением наклонной дальности L0 до заданного OB и текущим значением наклонной дальности L сближения с заданным OB основания интегрированного устройства вместе с подвижным носителем;
- сигналами е1, е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz;
- направляющими косинусами βij, где i, j=1,2,3, взаимного текущего углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Оξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OB, расположенным на земной поверхности.
По получаемому сигналу, пропорциональному рассогласованию ΔL между заданным начальным значением наклонной дальности L0 до заданного OB и текущим значением наклонной дальности L сближения с заданным OB основания интегрированного антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение заданного OB по дальности.
Полученные сигналы, пропорциональные параметрам е1, е2, инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, преобразуют путем их интегрирования в замкнутом контуре инерциального автосопровождения заданного OB по направлению в управляющие сигналы, пропорциональные соответственно скорости 

Для этого этими управляющими сигналами воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней двухосного карданова подвеса интегрированного антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом (фиг.7, фиг.8). Под действием этих управляющих сигналов создают возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом согласно прецессионной теории гироскопа возникает прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости 

 и азимута
и азимута  заданного OB относительно основания интегрированного антенного устройства в системе координат, связанной с центром масс подвижного носителя.
заданного OB относительно основания интегрированного антенного устройства в системе координат, связанной с центром масс подвижного носителя.
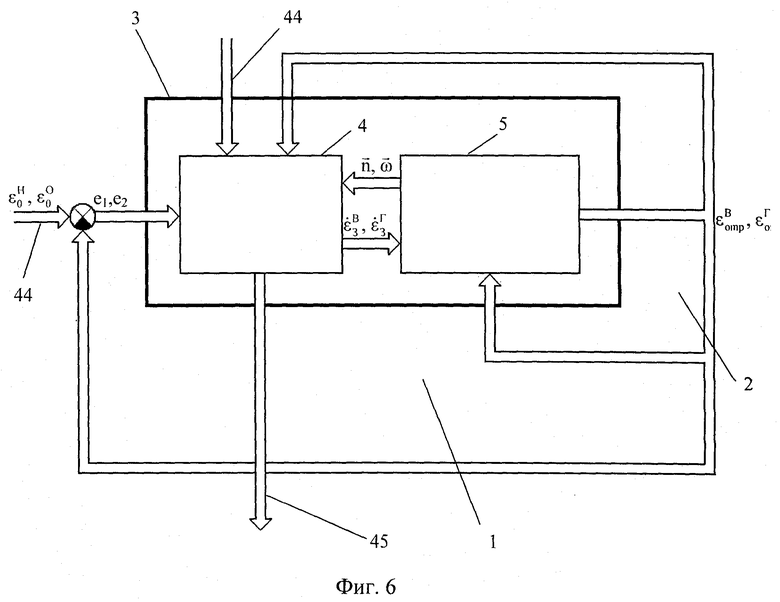
Сущность изобретения заключается также в том, что система, осуществляющая способ, характеризующаяся тем, что состоит из узкополосного контура инерциального автосопровождения и широкополосного контура гиростабилизации. и управления направлением вектора визирования заданного OB (фиг.6), содержит инерциальный дискриминатор (фиг.6) сигналов пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz (фиг.1, фиг.2), который включает в свой состав цифровое вычислительное устройство (ЦВУ) и интегрированное антенное устройства (ИАУ) (фиг.6, фиг.7). ИАУ содержит зеркало с облучателем и волноводно-коммутирующим устройством (ВКУ), двухосный карданов подвес, ось поворота наружной рамки которого установлена на основании ИАУ, а ось поворота внутренней рамки установлена в наружной рамке перпендикулярно к ее оси поворота, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса. ИАУ содержит датчик сигнала угла поворота наружной рамки двухосного карданова подвеса, датчик сигнала угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости (ДУС), три однокомпонентных акселерометра (фиг.7, фиг.8). Причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса ИАУ так, что направление вектора кинетического момента  его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования ИАУ. Гироскоп содержит трехосный карданов подвес ротора, датчик сигнала угла прецессии внутренней рамки трехосного карданова подвеса ротора гироскопа и датчик сигнала угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. При этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось поворота которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось поворота которой, в свою очередь, установлена в корпусе гироскопа. Корпус гироскопа жестко закреплен во внутренней рамке трехосного карданова подвеса ИАУ. На соответствующих осях поворота рамок трехосного карданова подвеса ротора гироскопа установлены соответственно датчики сигналов угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа. ИАУ также включает в свой состав электронный узел гиростабилизации и управления направлением зеркала ИАУ на OB по углу наклона, электронный узел гиростабилизации и управления направлением зеркала ИАУ на OB по азимуту, а также усилители сигналов обратной связи в соответствующих каналов двухканального гироскопического датчика измерения составляющих вектора абсолютной угловой скорости поворота зеркала ИАУ. Двухканальный гироскопический датчик угловой скорости (ДУС) (фиг.7, фиг.8) установлен во внутренней рамке двухосного карданова подвеса ИАУ так, что в заарретированном положении одна из его осей чувствительности совпадает с направлением линии визирования ИАУ, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси поворота внутренней рамки двухосного карданова подвеса ИАУ. При этом направление вектора кинетического момента
его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования ИАУ. Гироскоп содержит трехосный карданов подвес ротора, датчик сигнала угла прецессии внутренней рамки трехосного карданова подвеса ротора гироскопа и датчик сигнала угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. При этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось поворота которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось поворота которой, в свою очередь, установлена в корпусе гироскопа. Корпус гироскопа жестко закреплен во внутренней рамке трехосного карданова подвеса ИАУ. На соответствующих осях поворота рамок трехосного карданова подвеса ротора гироскопа установлены соответственно датчики сигналов угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа. ИАУ также включает в свой состав электронный узел гиростабилизации и управления направлением зеркала ИАУ на OB по углу наклона, электронный узел гиростабилизации и управления направлением зеркала ИАУ на OB по азимуту, а также усилители сигналов обратной связи в соответствующих каналов двухканального гироскопического датчика измерения составляющих вектора абсолютной угловой скорости поворота зеркала ИАУ. Двухканальный гироскопический датчик угловой скорости (ДУС) (фиг.7, фиг.8) установлен во внутренней рамке двухосного карданова подвеса ИАУ так, что в заарретированном положении одна из его осей чувствительности совпадает с направлением линии визирования ИАУ, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси поворота внутренней рамки двухосного карданова подвеса ИАУ. При этом направление вектора кинетического момента  ротора гироскопического ДУС совпадает с положительным направлением оси поворота наружной рамки двухосного карданова подвеса ИАУ. Все три акселерометра, измеряющих соответственно проекции вектора кажущегося линейного ускорения, установлены во внутренней рамке двухосного карданова подвеса ИАУ так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных акселерометров, измеряющих соответствующие проекции кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных акселерометров совпадает в заарретированном положении с нулевым положением линии визирования ИАУ. Выходы соответствующих датчиков сигналов угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа соединены с входом соответствующих узлов гиростабилизации и управления направлением зеркала ИАУ на заданный OB по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса ИАУ. При этом выходы датчиков сигналов угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического ДУС соединены со входом соответствующих усилителей сигнала обратной связи, выходы которых соединены соответственно с датчиками сигналов момента внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического ДУС. 3еркало выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании ИАУ. При этом зеркала шарнирно соединено тягами механического координатора ИАУ соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса ИАУ так, что расстояние между каждым из шарниров на задней поверхности и его центром поворота равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и внутренней рамке двухосного карданова подвеса ИАУ, и центром поворота этих рамок. ИАУ включает в свой состав также электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, и, кроме того, электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединенного с входом датчика сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. Причем сигнал, снимаемый с выхода электронного узла масштабирования сигнала с выхода электронного узла формирования управляющего сигнала угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала ИАУ на поперечную ось Oz3 системы координат OxЗyЗzЗ, связанной с зеркалом. Выход электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости
ротора гироскопического ДУС совпадает с положительным направлением оси поворота наружной рамки двухосного карданова подвеса ИАУ. Все три акселерометра, измеряющих соответственно проекции вектора кажущегося линейного ускорения, установлены во внутренней рамке двухосного карданова подвеса ИАУ так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных акселерометров, измеряющих соответствующие проекции кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных акселерометров совпадает в заарретированном положении с нулевым положением линии визирования ИАУ. Выходы соответствующих датчиков сигналов угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа соединены с входом соответствующих узлов гиростабилизации и управления направлением зеркала ИАУ на заданный OB по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса ИАУ. При этом выходы датчиков сигналов угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического ДУС соединены со входом соответствующих усилителей сигнала обратной связи, выходы которых соединены соответственно с датчиками сигналов момента внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического ДУС. 3еркало выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании ИАУ. При этом зеркала шарнирно соединено тягами механического координатора ИАУ соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса ИАУ так, что расстояние между каждым из шарниров на задней поверхности и его центром поворота равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и внутренней рамке двухосного карданова подвеса ИАУ, и центром поворота этих рамок. ИАУ включает в свой состав также электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, электронный узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, и, кроме того, электронный узел масштабирования сигнала, снимаемого с выхода электронного узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединенного с входом датчика сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. Причем сигнал, снимаемый с выхода электронного узла масштабирования сигнала с выхода электронного узла формирования управляющего сигнала угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала ИАУ на поперечную ось Oz3 системы координат OxЗyЗzЗ, связанной с зеркалом. Выход электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости  , поворота зеркала в горизонтальной плоскости, соединен с входом датчика сигнала момента управления направлением поворота внутренней рамки трехстепенного карданова подвеса ротора гироскопа.
, поворота зеркала в горизонтальной плоскости, соединен с входом датчика сигнала момента управления направлением поворота внутренней рамки трехстепенного карданова подвеса ротора гироскопа.
Выходы трех однокомпонентных акселерометров соединены соответственно с первым, вторым и третьим входами ЦВУ. Выходы двухканального гироскопического ДУС и выход электронного узла масштабирования соединены соответственно с четвертым, пятым и шестым входами ЦВУ. Выход датчика сигнала угла поворота наружной рамки и выход датчика сигнала угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту соединены с седьмым и с восьмым входами ЦВУ соответственно. Первый и второй выход ЦВУ соединен соответственно с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости  поворота зеркала в вертикальной плоскости и с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости
поворота зеркала в вертикальной плоскости и с входом электронного узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости  поворота зеркала в горизонтальной плоскости. Информационная линия связи соединяет аппаратуру формирования массива сигналов координат начального определения и установления заданного OB и начальной выставки (НВ) инерциального дискриминатора сигналов пеленгования заданного OB, внешнюю по отношению к заявляемой системе инерциального автосопровождения, с информационным девятым входом ЦВУ. Информационный третий выход ЦВУ соединен информационной линией связи, по которой поступает массив сигналов, необходимых для формирования сигналов самонаведения подвижного носителя на заданный OB, с аппаратурой формирования сигналов управления подвижным носителем, внешней по отношению к заявляемой системе инерциального автосопровождения заданного OB.
поворота зеркала в горизонтальной плоскости. Информационная линия связи соединяет аппаратуру формирования массива сигналов координат начального определения и установления заданного OB и начальной выставки (НВ) инерциального дискриминатора сигналов пеленгования заданного OB, внешнюю по отношению к заявляемой системе инерциального автосопровождения, с информационным девятым входом ЦВУ. Информационный третий выход ЦВУ соединен информационной линией связи, по которой поступает массив сигналов, необходимых для формирования сигналов самонаведения подвижного носителя на заданный OB, с аппаратурой формирования сигналов управления подвижным носителем, внешней по отношению к заявляемой системе инерциального автосопровождения заданного OB.
Введение указанных признаков в способ и в систему для его осуществления обеспечивает инерциальное автосопровождение заданного OB по сигналам рассогласования по дальности и углового рассогласования, характеризующимися параметрами инерциального пеленгования заданного OB по дальности и по направлению в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат при перемещении по траектории подвижного носителя и его сближении с заданным OB. При это обеспечивается повышения точности инерциального автосопровождения заданного OB на автономном участке траектории самонаведения подвижного носителя, а также точности и помехоустойчивости локационного (в частности, радиолокационного) автосопровождения OB, а также повышение тактико-технических характеристик интегрированных комплексированных бортовых систем самонаведения.
Из уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений задачи инерциального автосопровождения заданного OB, построения интегрированной системы инерциального автосопровождения заданного OB по информации инерциального дискриминатора сигналов пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат.
Поэтому предложенные технические решения соответствуют условиям изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
- на фиг.1 - принятые системы координат;
- на фиг.2 - положение вектора  визирования заданного OB в базовой антенной системе координат Oxyz;
визирования заданного OB в базовой антенной системе координат Oxyz;
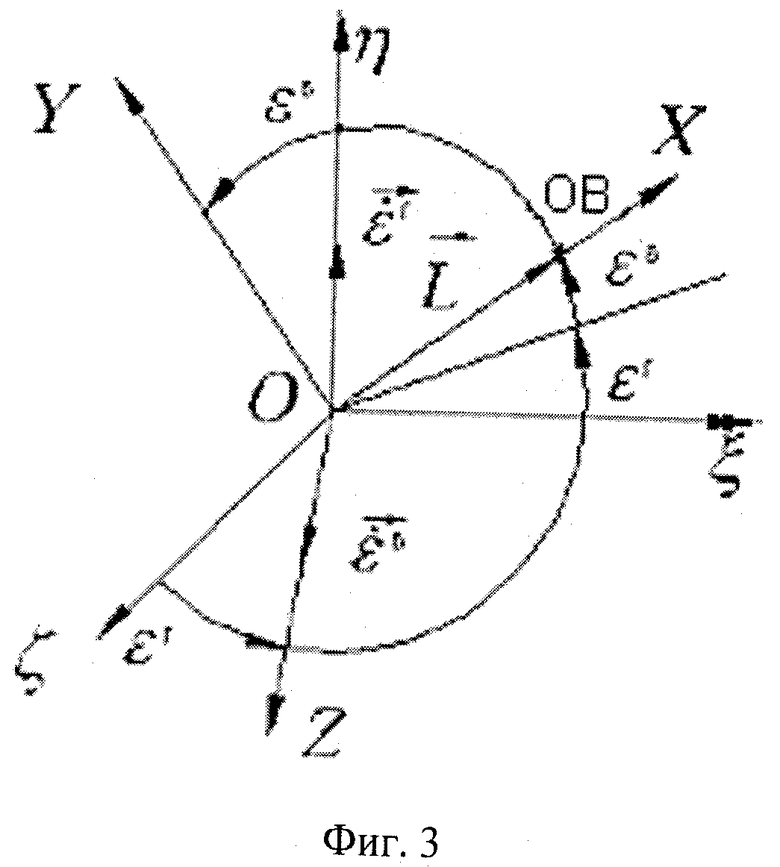
- на фиг.3 - взаимное положение базовой антенной системы координат Oxyz и местной горизонтальной системы координат Оξηζ;
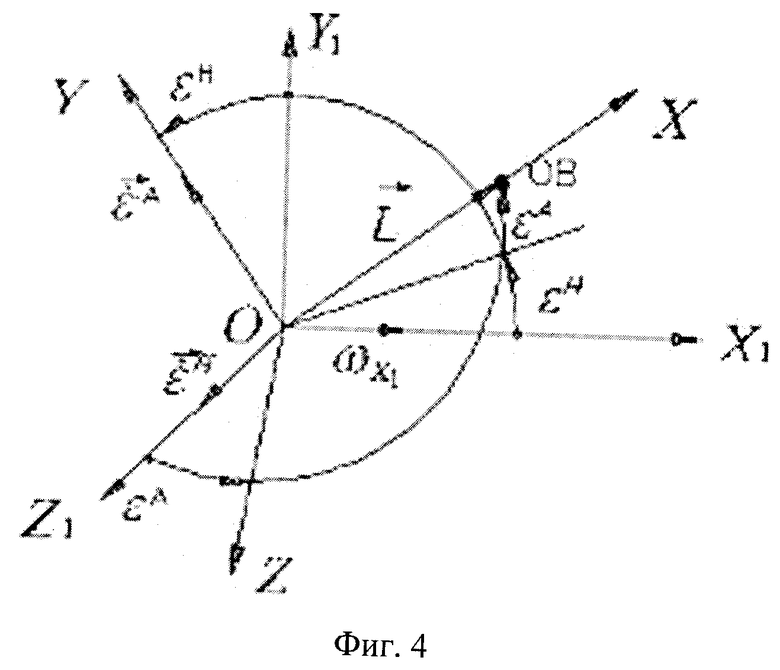
- на фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной системы координат Ox1y1z1;
- на фиг.5 - взаимное положение связанной с центром масс подвижного носителя системы координат Ox1y1z1 и местной горизонтальной системы координат Оξηζ;
- на фиг.6 - функциональная схема предлагаемой интегрированной системы инерциального автосопровождения заданного OB;
- на фиг.7 - функционально-структурная схема предлагаемой интегрированной системы инерциального автосопровождения заданного OB;
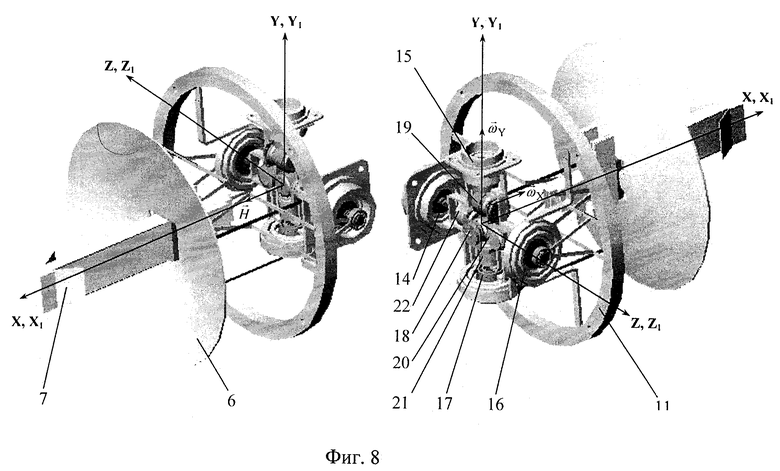
- на фиг.8 - принципиальная кинематическая схема интегрированного антенного устройства.
Предлагаемый способ характеризуется тем, что для обеспечения инерциального автосопровождения заданного OB по направлению и, следовательно, формирования сигналов е1 и е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz (фиг.2), а также для инерциального автосопровождения заданного OB по дальности и, следовательно, формирования сигнала, пропорционального рассогласованию ΔL между начальным значением наклонной дальности L0 до заданного OB и текущим значением наклонной дальности L сближения с заданным OB основания интегрированного антенного устройства вместе с подвижным носителем во время предстартовой подготовки к пуску подвижного носителя, задают сигналы, пропорциональные начальным значениям наклонной дальности L0, угла наклона

- пеленгов, т.е. угла наклона
- наклонной дальности L0 до заданного OB и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем в предстартовом положении (фиг.1);
сближения с заданным OB основания антенного устройства вместе с подвижным носителем в предстартовом положении (фиг.1);
- рыскания Ψ0, тангажа ϑ0 и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5),
а также начальные условия выставки инерциального пеленгования заданного OB, т.е. штатные сигналы, пропорциональные начальным значениям:
- проекций  ,
,  ,
,  вектора
вектора
- декартовых координат ξ0(D0), η0(Н0), ζ0 подвижного носителя в местной горизонтальной системе координат Оξηζ (фиг.1);
- долготы λ0 и географической широты  подвижного носителя (фиг.1)
подвижного носителя (фиг.1)
и, кроме того, сигналы, пропорциональные необходимым режимным параметрам дальности, контрольное слово и командное слово.
Далее сформированные сигналы в виде пакета последовательных информационных слов проверяют на отсутствие в них искажений. После этого сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельный код для обеспечении формирования сигналов инерциального пеленгования заданного OB. Затем на борту подвижного носителя преобразуют сигналы, пропорциональные начальным условиям выставки инерциального пеленгования заданного OB, в сигналы пропорциональные начальным значениям:
- проекций , , вектора
- углов и
- составляющих и пространственной угловой координаты заданного OB, т.е. параметров инерпиального пеленгования в двух взаимно перпендикулярных плоскостях его пеленгования в базовой антенной системе координат Oxyz (фиг.1, фиг.2), которые характеризуют сигналы рассогласования между направлением оптической оси зеркала антенного устройства и направлением на заданный OB в соответствующих плоскостях пеленгования;
- направляющих косинусов  (где i, j=1,2,3), определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Оξηζ связанной одной своей осью Сζ0 с заданным OB, расположенном на земной поверхности (фиг.1).
(где i, j=1,2,3), определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Оξηζ связанной одной своей осью Сζ0 с заданным OB, расположенном на земной поверхности (фиг.1).
Формирование перечисленных сигналов выполняют согласно следующему алгоритму:

где ξ0=ξmax - начальное значение горизонтальной декартовой координаты заданного OB, т.е. горизонтальная дальность D0 пуска подвижного носителя;

где ζ0 - начальное значение боковой декартовой координаты заданного OB в горизонтальной плоскости;





где r0 - начальное значение модуля радиуса-вектора 
Н0=η0 - высота пуска подвижного носителя;

где L0 - начальное значение наклонной дальности до заданного OB в предстартовом положении подвижного носителя;
P0 - начальное значение полупериметра векторного треугольника, образуемого векторами 






где i, j=1, 2, 3;
В момент старта подвижного носителя обновление сигналов начальной информации прекращают, а после старта во время его движения по траектории определяют сигналы, пропорциональные измеренным текущим значениям проекций 













где: 

eH, eA - углы поворота линии (вектора) визирования заданного OB по наклону и по азимуту соответственно относительно основания антенного устройства в связанной антенной системы координат (фиг.4);

где



По полученным сигналам, пропорциональным сигналам nx, ny, nz вектора

- проекциям Vx, Vy, Vz вектора 
- наклонной дальностью L и наклонной скоростью сближения с заданным OB основания интегрированного антенного устройства вместе с подвижным носителем.
- рассогласования ΔL между заданным начальным значением наклонной дальности L0 до заданного OB и текущим значением наклонной дальности L сближения с заданным OB основания интегрированного антенного устройства вместе с подвижным носителем;
- составляющими е1 и е2 пространственной угловой координаты 
- направляющими косинусами βij, где i, j=1, 2, 3, - взаимного текущего углового положения базовой антенной системе координат Oxyz и опорной геоцентрической системе координат Оξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OB, расположенном на земной поверхности (фиг.1), согласно следующему алгоритму:
где i, j=1, 2, 3;
L0=Lmax - наклонная дальность пуска подвижного носителя до заданного OB;
, , , L0, , , - начальные условия выставки инерциального измерения параметров вектора визирования заданного OB в инерциальном дискриминаторе сигналов пеленгования заданного OB;







где для неподвижного заданного OB R=const и, принимая угловую скорость суточного вращения земли Q=const,

причем

и

Таким образом, реализуя изложенные выше алгоритмы, формируют сигнал, пропорциональный рассогласованию ΔL, определяемому из системы уравнений (23) согласно алгоритму:

между получаемым текущим значением наклонной дальности L сближения с заданным OB и начальным значением наклонной дальности L0 до заданного OB подвижного носителя вместе с основанием интегрированного антенного устройства, по которому осуществляют инерциальное автосопровождение заданного OB по дальности.
Кроме того, полученные сигналы е1 и е2 инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz преобразуют путем их интегрирования в замкнутом контуре инерциального автосопровождения заданного OB по направлению в управляющие сигналы, пропорциональные соответственно скорости 


Для этого этими управляющими сигналами воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного в внутренней рамке двухосного карданова подвеса интегрированного антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом (фиг.7, фиг.8). Под действием этих управляющих сигналов создают возмущающее управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом согласно - прецессионной теории гироскопа возникает прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью близкой по величине к угловой скорости и изменения соответствующих углов визирования заданного OB. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением на заданный OB, сформированным сигналами, пропорциональными скорости и изменения углов визирования заданного OB в горизонтальной и в вертикальной плоскости и соответственно возмущающим управляющим моментам. Эти сигналы преобразуют в сигналы управления электродвигателями поворота рамок двухосного карданова подвеса интегрированного устройства. По сигналам управления электродвигатели развивают поворотные моменты, равные и совпадающие по направлению с направлением соответствующих возмущающих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса интегрированного антенного устройства и шарнирно связанного с ним зеркала в текущее направление на заданный OB, тем самым замыкают контур инерциального автосопровождения заданного OB. При этом одновременно определяют отработанные сигналы, пропорциональные соответственно углу наклона 

Система, осуществляющая способ, состоит из узкополосного контура 1 инерциального автосопровождения и широкополосного контура 2 гиростабилизации и управления направлением вектора визирования заданного OB (фиг.6), содержит инерциальный дискриминатор 3 (фиг.6) сигналов пеленгования заданного. OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz (фиг.1, фиг.2), который включает в свой. состав цифровое вычислительное устройство (ЦВУ) 4 и интегрированное антенное устройства (ИАУ) 5 (фиг.6, фиг.7). ИАУ 5 содержит зеркало 6 с облучателем 7 и волноводно-коммутирующим устройством (ВКУ), двухосный карданов подвес 8, ось 9 поворота наружной рамки 10 которого установлена на основании 11 ИАУ 5, а ось 12 поворота внутренней рамки 13 установлена в наружной рамке 10 перпендикулярно к ее оси 9 поворота, электродвигатель 14 поворота наружной рамки 10 двухосного карданова подвеса 8 и электродвигатель 15 поворота внутренней рамки 13 двухосного карданова подвеса 8. ИАУ 5 содержит датчик 16 сигнала угла поворота наружной рамки 10 двухосного карданова подвеса 8, датчик 17 сигнала угла поворота внутренней рамки 13 двухосного карданова подвеса 8 соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп 18, двухканальный гироскопический датчик 19 угловой скорости (ДУС), три однокомпонентных акселерометра 20, 21, 22 (фиг.7, фиг.8). Причем управляемый трехстепенной гироскоп 18 установлен во внутренней рамке 13 двухосного карданова подвеса 8 ИАУ 5 так, что направление вектора кинетического момента Н его ротора 23 в заарретированном положении гироскопа 18 совпадает с нулевым направлением линии визирования ИАУ 5. Гироскоп 18 содержит трехосный карданов подвес 24 ротора 23, датчик 25 сигнала угла прецессии внутренней рамки 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18 и датчик 27 сигнала угла прецессии наружной рамки 28 трехосного карданова подвеса 24 ротора 23 гироскопа 18, датчик 29 сигнала момента управления направлением поворота внутренней рамки 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18, датчик 30 сигнала момента управления направлением поворота наружной рамки 28 трехосного карданова подвеса 24 ротора 23 гироскопа 18. При этом ось 31 собственного вращения ротора 23 гироскопа 18 установлена во внутренней рамке 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18, ось 32 поворота которой установлена в наружной рамке 28 трехосного карданова подвеса 24 ротора 23 гироскопа 18, ось 33 поворота которой, в свою очередь, установлена в корпусе гироскопа 18. Корпус гироскопа 18 жестко закреплен во внутренней рамке 13 трехосного карданова подвеса 8 ИАУ 5. На соответствующих осях 32 и 33 поворота рамок 26 и 28 трехосного карданова подвеса 24 ротора 23 гироскопа 18 установлены соответственно датчики 25 и 27 сигналов угла прецессии внутренней рамки 26 и наружной рамки 28 трехосного карданова подвеса 24 ротора 23 гироскопа 18. ИАУ 5 также включает в свой состав электронный узел 34 гиростабилизации и управления направлением зеркала 6 ИАУ 5 на OB по углу наклона, электронный узел 35 гиростабилизации и управления направлением зеркала 6 ИАУ 5 на OB по азимуту, а также усилители 36 и 37 сигналов обратной связи в соответствующих каналов двухканального гироскопического датчика 19 измерения составляющих вектора абсолютной угловой скорости поворота зеркала 6 ИАУ 5. Двухканальный гироскопический датчик угловой скорости (ДУС) 19 (фиг.7, фиг.8) установлен во внутренней рамке 13 двухосного карданова подвеса 8 ИАУ 5 так, что в заарретированном положении одна из его осей чувствительности совпадает с направлением линии визирования ИАУ 5, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси 12 поворота внутренней рамки 13 двухосного карданова подвеса 8 ИАУ 5. При этом направление вектора кинетического момента 
 поворота зеркала 6 в горизонтальной плоскости, соединен с входом датчика 29 сигнала момента управления направлением поворота внутренней рамки 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18.
поворота зеркала 6 в горизонтальной плоскости, соединен с входом датчика 29 сигнала момента управления направлением поворота внутренней рамки 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18.
Выходы трех однокомпонентных акселерометров 20, 21, 22 соединены соответственно с первым, вторым и третьим входами ЦВУ 4. Выходы двухканального гироскопического ДУС 19 и выход электронного узла 43 масштабирования соединены соответственно с четвертым, пятым и шестым входами ЦВУ 4. Выход датчика 16 сигнала угла поворота наружной рамки 10 и выход датчика 17 сигнала угла поворота внутренней рамки 13 двухосного карданова подвеса 8 соответственно по углу наклона и по азимуту соединены с седьмым и с восьмым входами ЦВУ 4 соответственно. Первый и второй выход ЦВУ 4 соединен соответственно с входом электронного узла 41 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 6 в вертикальной плоскости и с входом электронного узла 42 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 6 в горизонтальной плоскости. Информационная линия связи 44 соединяет аппаратуру формирования массива сигналов координат начального определения и установления заданного OB и начальной выставки (НВ) инерциального дискриминатора сигналов пеленгования заданного OB, внешнюю по отношению к заявляемой системе инерциального автосопровождения, с информационным девятым входом ЦВУ 4. Информационный третий выход ЦВУ 4 соединен информационной линией связи 45, по которой поступает массив сигналов, необходимых для формирования сигналов самонаведения подвижного носителя на заданный OB, с аппаратурой формирования сигналов управления подвижным носителем, внешней по отношению к заявляемой системе инерциального автосопровождения заданного OB.
Работа предлагаемой системы, осуществляющей заявленный способ, выполняется следующим образом.
При предстартовой подготовке и управлении пуском подвижного носителя в режиме начального определения и установления координат задаваемого OB и начальной выставки инерциального пеленгования заданного OB на информационный вход ЦВУ по информационной линии связи по стандартному цифровому каналу из внешней аппаратуры подготовки и управления пуском на приемник последовательного кода поступает штатный информационный массив, состоящий, например, из 20-ти 32-разрядных слов (фиг.7):
- контрольное слово
- L0 - начальное значение наклонной дальности сближения с заданным OB основания 11 антенного устройства 5 (фиг.7) вместе с подвижным носителем,
- 
- , , - начальные значения проекций вектора  линейной скорости подвижного носителя на оси местной горизонтальной системы координат Оξηζ (фиг.1),
линейной скорости подвижного носителя на оси местной горизонтальной системы координат Оξηζ (фиг.1),
- ξ0, η0, ζ0 - начальные значения декартовых координат заданного OB в местной горизонтальной системе координат Оξηζ,
- λ0, - начальные значения долготы и географической широты подвижного носителя в момент старта (фиг.1),
- Ψ0, υ0, γ0 - начальные значения рыскания, тангажа, крена в момент старта подвижного носителя,
-  ,
, 
- LПП - сигнал, пропорциональный наклонной дальности до заданного OB, характеризующий переход в режим перемещения подвижного носителя на конечном участке траектории,
- командное слово, содержащее режимные команды, определяющие алгоритм работы системы.
Штатный информационный массив по мере изменения взаимного положения подвижного носителя и заданного OB в предстартовом состоянии непрерывно обновляется и перезаписывается, проверяется на отсутствие искажений сигналов передаваемой информации. При этом в ЦВУ 4 инерциального дискриминатора 3 сигналов пеленгования заданного OB (фиг.6) реализуются алгоритмы (1)÷(14) формирования сигналов начальной выставки инерциального измерения параметров вектора визирования задаваемого OB, а именно:
- , 
- , , - начальные значения проекций вектора
- , - значения составляющих пространственной угловой координаты е заданного OB в базовой антенной системе координат Oxyz (фиг.2), характеризуемые начальными значениями соответствующих сигналов пеленгования заданного OB в двух взаимно перпендикулярных плоскостях в системе координат Oxyz,
- 

- , где i, j=1, 2, 3, - матрица начальных значений направляющих косинусов, определяющих взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Оξ0η0ζ0, одна координатная ось которой связана с заданным OB (фиг.1).
В момент старта подвижного носителя поступление по информационной линии связи 44 в ЦВУ 4 инерциального дискриминатора 3 штатного информационного массива предстартового определения и установления начальных координат заданного OB и начальной выставки инерциального пеленгования заданного OB прекращается (фиг.6). Одновременно с этим разаарретируется управляемый трехстепенной гироскоп 18, гироскопический ДУС 19, акселерометры 20, 21, 22 и включается процесс инерциального пеленгования заданного OB, алгоритм функционирования которого (23) реализуется в ЦВУ 4 инерциального дискриминатора 3. При этом сигналы, пропорциональные измеренным проекциям , , вектора , с выхода соответствующих акселерометров 20, 21, 22 подаются соответственно на входы 1, 2, 3 ЦВУ 4, где преобразуются согласно алгоритмам (16), (17), (18) в сигналы, пропорциональные проекциям nx, ny, nz вектора
, , вектора
на оси базовой антенной системы координат Oxyz (фиг.7).
По полученным сигналам, пропорциональным проекциям nx, ny, nz и ωx, ωy, ωz в ЦВУ 4 дискриминатора 3 (фиг.6) при определенных и установленных начальных значениях координат заданного OB и начальных условиях выставки инерциального измерения параметров вектора визирования заданного OB формируют (выделяют) согласно алгоритму (23) сигналы инерциального пеленгования, пропорциональные параметрам:



По сигналу, пропорциональному рассогласованию ΔL, в ЦВУ 4 дискриминатора 3 осуществляется инерциальное (автономное) автосопровождение заданного OB по дальности.
С выходов 1 и 2 ЦВУ 4 сигналы, пропорциональные е1 и е2, после их преобразования в ЦВУ 4 соответственно в сигналы, пропорциональные 



поступают соответственно на вход электронного узла 41 и на вход электронного узла 42. При этом сигнал, снимаемый с выхода электронного узла 43 масштабирования сигнала с выхода электронного узла 41 формирования управляющего сигнала, пропорционального угловой скорости поворота зеркала 6 интегрированного антенного устройства 5 в вертикальной плоскости, пропорционален также проекции 
 поворота зеркала 6, поступает на вход датчика 30 сигнала момента управления направлением поворота наружной рамки 28 трехосного карданова подвеса 24 ротора 13 гироскопа 18 (фиг.7, фиг.8). С выхода электронного узла 42 сигнал, пропорциональный задаваемой горизонтальной угловой скорости поворота зеркала 6, поступает на вход датчика 29 сигнала момента управления направлением поворота внутренней рамки 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18 (фиг.7, фиг.8). Под действием управляющих сигналов, пропорциональных соответственно угловой скорости и , возникают возмущающие управляющие моменты, которые согласно прецессионной теории гироскопа вызывают моменты гироскопической реакции в опорах осей 32 и 33 прецессии соответствующих рамок 28 и 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18. Вследствие этого возникает прецессионное отклонение соответствующих рамок 28 и 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18 с угловой скоростью, близкой по величине к угловой скорости и изменения соответствующих углов поворота зеркала 6. Одновременно с выхода соответствующих датчиков 25 и 27 сигнала угла прецессии сигналы, пропорциональные рассогласованию между направлением вектора
поворота зеркала 6, поступает на вход датчика 30 сигнала момента управления направлением поворота наружной рамки 28 трехосного карданова подвеса 24 ротора 13 гироскопа 18 (фиг.7, фиг.8). С выхода электронного узла 42 сигнал, пропорциональный задаваемой горизонтальной угловой скорости поворота зеркала 6, поступает на вход датчика 29 сигнала момента управления направлением поворота внутренней рамки 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18 (фиг.7, фиг.8). Под действием управляющих сигналов, пропорциональных соответственно угловой скорости и , возникают возмущающие управляющие моменты, которые согласно прецессионной теории гироскопа вызывают моменты гироскопической реакции в опорах осей 32 и 33 прецессии соответствующих рамок 28 и 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18. Вследствие этого возникает прецессионное отклонение соответствующих рамок 28 и 26 трехосного карданова подвеса 24 ротора 23 гироскопа 18 с угловой скоростью, близкой по величине к угловой скорости и изменения соответствующих углов поворота зеркала 6. Одновременно с выхода соответствующих датчиков 25 и 27 сигнала угла прецессии сигналы, пропорциональные рассогласованию между направлением вектора  и и соответственно возмущаемыми управляющими моментами. Эти сигналы поступают соответственно на входы электронных узлов 34 и 35, с выхода которых после преобразования в управляющие электрические напряжения и усиления по мощности подаются на управляющую обмотку соответствующих электродвигателей 14 и 15 поворота рамок 10 и 13 двухосного карданова подвеса 8 зеркала 6 интегрированного антенного устройства 5.
и и соответственно возмущаемыми управляющими моментами. Эти сигналы поступают соответственно на входы электронных узлов 34 и 35, с выхода которых после преобразования в управляющие электрические напряжения и усиления по мощности подаются на управляющую обмотку соответствующих электродвигателей 14 и 15 поворота рамок 10 и 13 двухосного карданова подвеса 8 зеркала 6 интегрированного антенного устройства 5.
По сигналам управления электродвигатели развивают поворотные моменты равные и совпадающие по направлению с направлением соответствующих возмущающих управляющих моментов, для поворота наружной 10 и внутренней 13 рамок-двухосного карданова подвеса 8 интегрированного антенного устройства 5 и шарнирно связанного с ним зеркала 6.
При этом одновременно с выхода датчиков 16 и 17 сигнала угла поворота наружной рамки 10 и внутренней рамки 13 двухосного карданова подвеса 8 соответственно по углу наклона и по азимуту поступают соответственно на 7 и 8 вход ЦВУ 4 сигналы отработки направления зеркала 6 на OB по углу наклона и по азимуту , которые в ЦВУ 4 преобразуются согласно соответствующим алгоритмам в сигналы, пропорциональные.


характеризующие поворот по углу наклона и по азимуту вектора L визирования в текущее направление на заданный OB. Таким образом замыкается контур инерциального (автономного) автосопровождения заданного OB. Одновременно с 3-го информационного выхода ЦВУ 4 по информационной линии связи 45 в аппаратуру, внешнюю по отношению к заявляемой системе, поступает массив сигналов, необходимых для формирования сигналов самонаведения подвижного носителя на заданный OB, а именно:
- 

- 
ЦВУ 4 инерциального дискриминатора 3 сигналов пеленгования заданного OB включает в свой состав аналого-цифровые преобразователи входных сигналов, процессор обработки сигналов акселерометров и гироскопический приборов, оперативно-запоминающее устройство, цифро-аналоговые преобразователи выходных сигналов, взаимосвязанные входы-выходы по каналам информационного обмена между собой, с внешним источником информации и интегрированным антенным устройством 5. ЦВУ 4 обеспечивает хранение штатного информационного массива сигналов, введенного от внешнего источника информации по информационной линии связи 44. Кроме того, ЦВУ 4 реализует математическое и программное обеспечение инерциального дискриминатора 3, позволяющее получить информацию о сигналах е1 и е2, инерциального пеленгования заданного OB в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz, о сигнале рассогласования ΔL по дальности между начальным значением наклонной дальности L0 до заданного OB и текущим значением наклонной дальности L сближения подвижного носителя с заданным OB для реализации интегрированной системы инерциального автосопровождения заданного OB, осуществляющей заявленный способ. Таким образом, предлагаемые технические решения (способ и система инерциального автосопровождения заданного OB) обеспечивают достижение положительного эффекта, заключающегося в следующем.
Предлагаемые технические решения обладают абсолютной помехозащищенностью так как не излучают и не принимают никаких радиосигналов, или сигналов в других диапазонах излучения. Использование заявленных технических решений обеспечивает повышение точности инерциального автосопровождения заданного OB на автономном участке траектории подвижного носителя, повышенную точность и помехоустойчивость при совместной работе предлагаемых технических решений, например, с радиолокационными системами автосопровождения OB.
Предложенные технические решения также обеспечивают повышение тактико-технических характеристик интегрированных комплексированных систем самонаведения подвижных носителей.
Результаты приведенных исследований подтверждают реализуемость предложенных способа и системы инерциального автосопровождения заданного OB и обеспечение ими достижения повышенных тактико-технических характеристик интегрированной комплексированной БССН подвижного носителя.

Изобретение относится к области приборостроения и может найти применение в системах автосопровождения заданного объекта визирования (ОВ), а также в системах самонаведения подвижных носителей с инерциальной измерительной системой. Технический результат - повышение точности. Для этого во время предстартовой подготовки к пуску подвижного носителя определяют и устанавливают сигналы, пропорциональные начальным координатам по наклонной дальности, по углу наклона, по азимуту взаимного положения подвижного носителя и первоначально заданного ОВ относительно основания интегрированного антенного устройства в связанной с центром масс подвижного носителя системе координат. При этом формируют штатные сигналы в виде пакета последовательных слов, пропорциональные параметрам начальной выставки инерциального измерение параметров вектора визирования заданного ОВ в местной горизонтальной системе координат. Эти сигналы преобразуют параллельную форму и по ним формируют сигналы, пропорциональные начальным условиям выставки инерциального пеленгования заданного ОВ в базовой антенной системе координат. 2 н.п. ф-лы, 8 ил.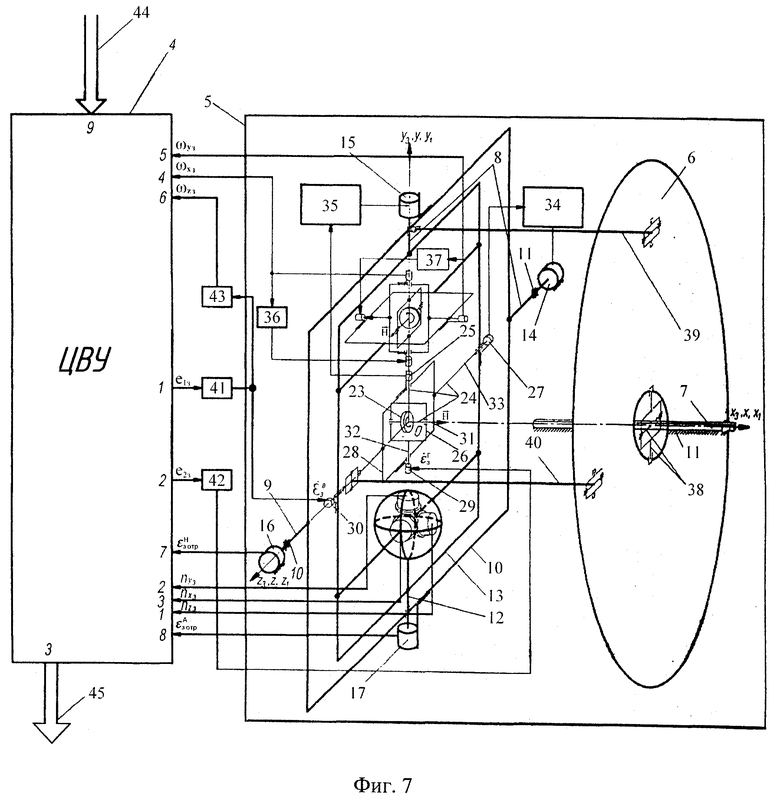
1. Способ инерциального автосопровождения заданного объекта визирования, характеризующийся тем, что во время предстартовой подготовки подвижного носителя определяют и устанавливают сигналы, пропорциональные начальным значениям наклонной дальности, угла наклона и азимута взаимного положения подвижного носителя и первоначально заданного объекта визирования (ОВ), при этом формируют штатные сигналы в виде пакета последовательных информационных слов, который содержит начальные значения угла наклона и азимута заданного ОВ относительно основания антенного устройства, жестко установленного внутрь корпуса подвижного носителя, в связанной с центром масс подвижного носителя системе координат, наклонной дальности до заданного ОВ и наклонной скорости сближения с заданным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом положении, рыскания, тангажа и крена подвижного носителя вместе с основанием антенного устройства, а также начальные условия выставки инерциального пеленгования заданного ОВ, т.е. штатные сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат, декартовых координат подвижного носителя в местной горизонтальной системе координат, долготы и географической широты α'0 подвижного носителя, а также сигналы, пропорциональные режимным параметрам по дальности, контрольное слово, командное слово, далее проверяют сформированные сигналы на отсутствие в них искажений, после чего сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельную форму для обеспечения формирования сигналов инерциального пеленгования заданного ОВ, затем преобразуют сигналы, пропорциональные начальным условиям выставки инерциального пеленгования заданного ОВ в сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, углов визирования заданного ОВ соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат, составляющих пространственной угловой координаты заданного ОВ, характеризуемых параметрами инерциального пеленгования его в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, направляющих косинусов, определяющих начальное взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным ОВ, расположенным на земной поверхности; в момент времени старта подвижного носителя обновление сигналов начального определения и установления координат заданного ОВ и сигналов начальной выставки инерциального пеленгования заданного ОВ прекращают и во время начала его движения по траектории вместе с основанием интегрированного антенного устройства одновременно измеряют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота зеркала интегрированного антенного устройства на соответствующие оси системы координат, связанной с зеркалом интегрированного антенного устройства, по этим измеренным сигналам с учетом переменной электрической редукции между углами поворота зеркала антенного устройства и вектора визирования заданного ОВ определяют сигналы, пропорциональные проекциям вектора, кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, формируют по полученным сигналам с учетом сигналов, определенных и установленных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования заданного ОВ, характеризующихся проекциями вектора линейной скорости сближения с заданным ОВ основания интегрированного антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, наклонной дальностью и наклонной скоростью сближения с заданным ОВ основания интегрированного антенного устройства вместе с подвижным носителем, рассогласованием между начальным значением наклонной дальности до заданного ОВ и текущим значением наклонной дальности сближения с заданным ОВ основания интегрированного антенного устройства вместе с подвижным носителем сигналами инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, направляющими косинусами взаимного текущего углового положения базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным ОВ, расположенным на земной поверхности, по полученному сигналу пропорциональному рассогласованию между заданным начальным значением наклонной дальности и текущим значением наклонной дальности сближения с заданным ОВ основания интегрированного антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение заданного ОВ по дальности, а полученные сигналы, пропорциональные параметрам инерциального пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, преобразуют путем их интегрирования в замкнутом контуре инерциального автосопровождения заданного ОВ по направлению в управляющие сигналы, пропорциональные соответственно скорости изменения углов визирования заданного ОВ, определяющих текущее направление вектора визирования на заданный ОВ в горизонтальной и в вертикальной плоскости, обусловленное перемещением основания интегрированного антенного устройства вместе с подвижным носителем по направлению к заданному ОВ, которыми воздействуют на соответствующие датчики момента управляющего трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом, под действием этих управляющих сигналов создают возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа, при этом возникает прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости изменения соответствующих углов визирования заданного ОВ, одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора кинетического момента ротора гироскопа и направлением на заданный ОВ, сформированным сигналами, пропорциональными скорости изменения углов визирования заданного ОВ в горизонтальной и в вертикальной плоскости и соответственно возмущающими управляющими моментами; эти сигналы преобразуют в сигналы управления электродвигателями поворота рамок двухосного карданова подвеса интегрированного антенного устройства, а по сигналам управления электродвигатели развивают поворотные моменты, равные и совпадающие по направлению с направлением соответствующих возмущающих управляющих моментов для поворота наружной и внутренней рамок двухосного карданова подвеса интегрированного антенного устройствами и шарнирно связанного с ним зеркала в текущее направление на заданный ОВ, тем самым замыкают контур инерциального автосопровождения заданного ОВ и определяют сигналы, пропорциональные отработанным значениям угла наклона и азимута заданного ОВ относительно основания интегрированного антенного устройства в системе координат, связанной с центром масс подвижного носителя.
2. Система, осуществляющая способ по п.1, характеризующаяся тем, что состоит из узкополосного контура инерциального автосопровождения заданного ОВ и широкополосного контура гиростабилизации и управления направлением вектора визирования ОВ, содержит инерциальный дискриминатор сигналов пеленгования заданного ОВ в двух взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, который включает в состав цифровое вычислительное устройство (ЦВУ), а также интегрированное антенной устройство, содержащее зеркало с облучателем и волноводно-коммутирующим устройством, двухосный карданов подвес, ось поворота наружной рамки которого установлена на основании интегрированного антенного устройства, а ось поворота внутренней рамки установлена в наружной рамке перпендикулярно к ее оси поворота, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик сигнала угла поворота наружной рамки двухосного карданова подвеса, датчик сигнала угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту, кроме того, управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости, три однокомпонентных акселерометра, причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства так, что направление вектора кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования интегрированного антенного устройства, гироскоп содержит трехосный карданов подвес ротора, датчик сигнала угла прецессии внутренней рамки трехосного карданова подвеса ротора и датчик сигнала угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в корпусе гироскопа, который жестко закреплен во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства, которое также включает в свой состав электронный узел гиростабилизации и управления направлением зеркала на ОВ по углу наклона, электронный узел гиростабилизации и управления направлением зеркала на ОВ по азимуту, а также усилители сигналов обратной связи в соответствующих каналах двухканального датчика угловой скорости, который установлен во внутренней рамки двухосного карданова подвеса интегрированного антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с направлением линии визирования интегрированного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси поворота внутренней рамки двухосного карданова подвеса интегрированного антенного устройства, при этом направление кинетического момента ротора гироскопического датчика угловой скорости совпадает с положительным направлением оси поворота наружной рамки двухосного карданова подвеса интегрированного антенного устройства; все три акселерометра установлены во внутренней рамке двухосного карданова подвеса интегрированного антенного устройства так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных акселерометров, при этом ось чувствительности одного из трех однокомпонентных акселерометров совпадает в заарретированном положении с нулевым положением линии визирования интегрированного антенного устройства;
выходы соответствующих датчиков сигнала угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа соответственно соединены с входом узлов гиростабилизации и управления направлением зеркала интегрированного антенного устройства, выходы которых соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса интегрированного антенного устройства, при этом выходы датчиков сигнала угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора двухканального гироскопического датчика угловой скорости соединены соответственно с входом усилителей сигнала обратной связи, выходы которых соединены с датчиками сигнала момента внутренней и наружной рамок двухканального гироскопического датчика угловой скорости; зеркало выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительна центра излучения облучателя, жестко закрепленного на основании интегрированного антенного устройства, при этом зеркало шарнирно соединено тягами механического координатора интегрированного антенного устройства соответственно с наружной рамкой и внутренней рамкой его двухосного карданова подвеса так, что расстояние между каждым из шарниров на задней поверхности зеркала и его центром поворота равно расстоянию между каждым из шарниров установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса интегрированного антенного устройства и центром вращения этих рамок; интегрированное антенное устройство включает в свой состав также узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, и, кроме того, узел масштабирования сигнала, снимаемого с выхода узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединенного с входом датчика сигнала момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, причем сигнал, снимаемый с выхода узла масштабирования сигнала с выхода узла формирования управляющего сигнала угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала на поперечную ось системы координат, связанной с зеркалом, выход узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, соединен с входом датчика сигнала момента управления направлением внутренней рамки трехосного карданова подвеса ротора гироскопа; выходы трех однокомпонентных акселерометров соединены соответственно с первым, вторым и третьим входами ЦВУ, выходы двухканального гироскопического датчика угловой скорости и выход узла масштабирования соединены с четвертым, пятым и шестым входами ЦВУ, выход датчика сигнала угла поворота наружной рамки и выход датчика сигнала угла поворота внутренней рамки двухосного карданова подвеса интегрированного антенного устройства соединены с седьмым и восьмым входом ЦВУ соответственно, первый и второй вход ЦВУ соединен соответственно с входом узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости и с входом узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в горизонтальной плоскости; информационный девятый вход ЦВУ соединен информационной линией связи с аппаратурой формирования штатного массива сигналов координат начального определения и установления заданного ОВ и начальной выставки инерциального пеленгования заданного ОВ, внешней по отношению к заявляемой системе, информационный третий выход ЦВУ соединен информационной линией связи, по которой поступает массив сигналов, необходимых для формирования сигналов самонаведения подвижного носителя на заданный ОВ, с аппаратурой формирования сигналов управления подвижного носителя, внешней по отношению к заявляемой системе инерциального автосопровождения заданного ОВ.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| АРТАМОНОВ В.М | |||
| Следящие системы радиолокационных станций автоматического сопровождения и управления | |||
| - Судостроение: Л., 1968, с.12-35 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |
| US 5786787 A, 28.07.1998. | |||

