Изобретение относится к транспортно-технологическому оборудованию, а более конкретно к наземным агрегатам для транспортировки, сборки, обслуживания и технологической подготовки крупногабаритных изделий, например, блоков (пакетов) космических аппаратов.
Известна технологическая подставка (11Ф654. ИЭ12, ч. 2, л. 90, КБ "Полет", 1992), предназначенная для размещения и снаряжения на ней рамы полезной нагрузки и состоящая из основания с установленными на нем опорными стойками. Недостатком данного устройства является невозможность его использования для рам полезной нагрузки с другими типоразмерами.
Известен также транспортно-технологический агрегат (11К65М-Ч. 9600-100СБ, сборочный чертеж, КБ "Полет", 1998), предназначенный для размещения и снаряжения на нем рам полезной нагрузки различных типоразмеров и состоящий из основания с установленными на нем регулируемыми штангами и опорными стойками.
Недостатком данного устройства является то, что на нижнюю плоскость рамы полезной нагрузки возможна только ручная установка грузов (на практике масса вручную устанавливаемых грузов не превышает 30 кг). Кроме того, данное устройство не позволяет обеспечить, даже с использованием кранового оборудования, установку на раму полезной нагрузки грузов (космических аппаратов), плоскость стыка которых с рамой полезной нагрузки не горизонтальна. Последнее становится особенно актуальным в настоящее время, когда широко практикуется групповое (пакетное) выведение в одном пуске нескольких различных типов космических аппаратов, при этом, из соображений максимального использования подобтекательного пространства, компоновка пакета обуславливает различные положения плоскостей отделения космических аппаратов от рамы полезной нагрузки. Также устройство имеет ограниченные возможности по обслуживанию полезной нагрузки в процессе проведения ряда испытаний (в том числе, испытаний механических систем космических аппаратов в составе пакета на раскрытие).
Целью предлагаемого изобретения являются расширение функциональных возможностей (возможность установки на раму полезной нагрузки космических аппаратов, плоскость стыка которых с рамой не горизонтальна) и повышение эксплуатационных характеристик (возможность крановой установки на раму полезной нагрузки космических аппаратов в различных зонах рамы, возможность безударного кантования рамы полезной нагрузки, в тoм числе и с установленными космическими аппаратами, возможность проведения испытаний механических систем космических аппаратов в составе пакета на раскрытие) транспортно-технологического агрегата.
Поставленная цель достигается тем, что на основании со стороны опорных стоек устанавливаются технологические упоры, а в приемных гнездах опорных стоек размещаются передние кронштейны поворотной платформы с возможностью их взаимодействия с приемными гнездами технологических упоров. На платформе также устанавливаются задние кронштейны, размещенные с возможностью взаимодействия с приемными гнездами опорных стоек и технологических упоров. При этом расстояние между опорными стойками и технологическими упорами принимается из условия размещения между ними при горизонтальном положении поворотной платформы вертикальной плоскости, проходящей через центр масс поворотной платформы с установленным на ней пакетом космических аппаратов и перпендикулярной продольной оси основания. Высота технологических упоров превышает высоту опорных стоек и принимается из условия размещения между регулируемыми штангами и опорными стойками при опирании поворотной платформы на опорные стойки и технологические упоры вертикальной плоскости перпендикулярной продольной оси основания и проходящей через центр масс поворотной платформы с установленной рамой полезной нагрузки и размещенными на ней по одну сторону относительно последней космическими аппаратами.
Предлагаемое устройство поясняется на фиг.1-10.
На фиг.1 показан транспортно-технологический агрегат в транспортном положении.
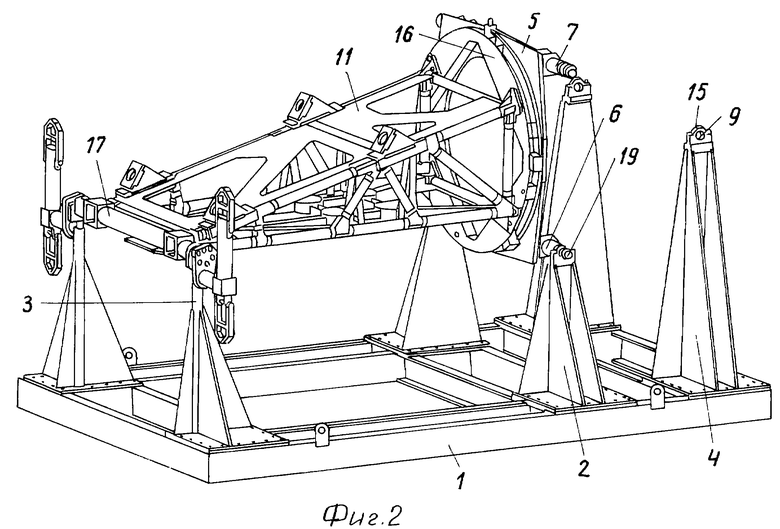
На фиг. 2 изображен транспортно-технологический агрегат с установленной рамой полезной нагрузки.
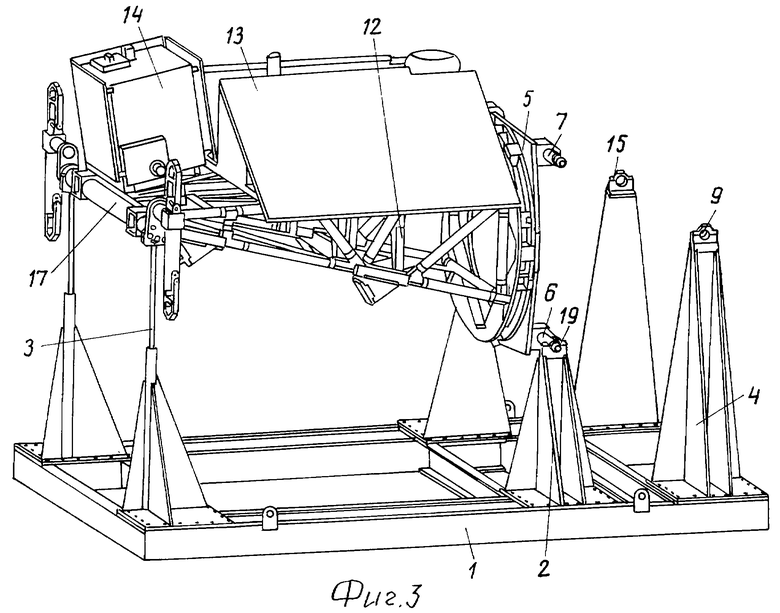
На фиг.3 представлено транспортно-технологический агрегат при установке космических аппаратов при вертикальном положении поворотной платформы.
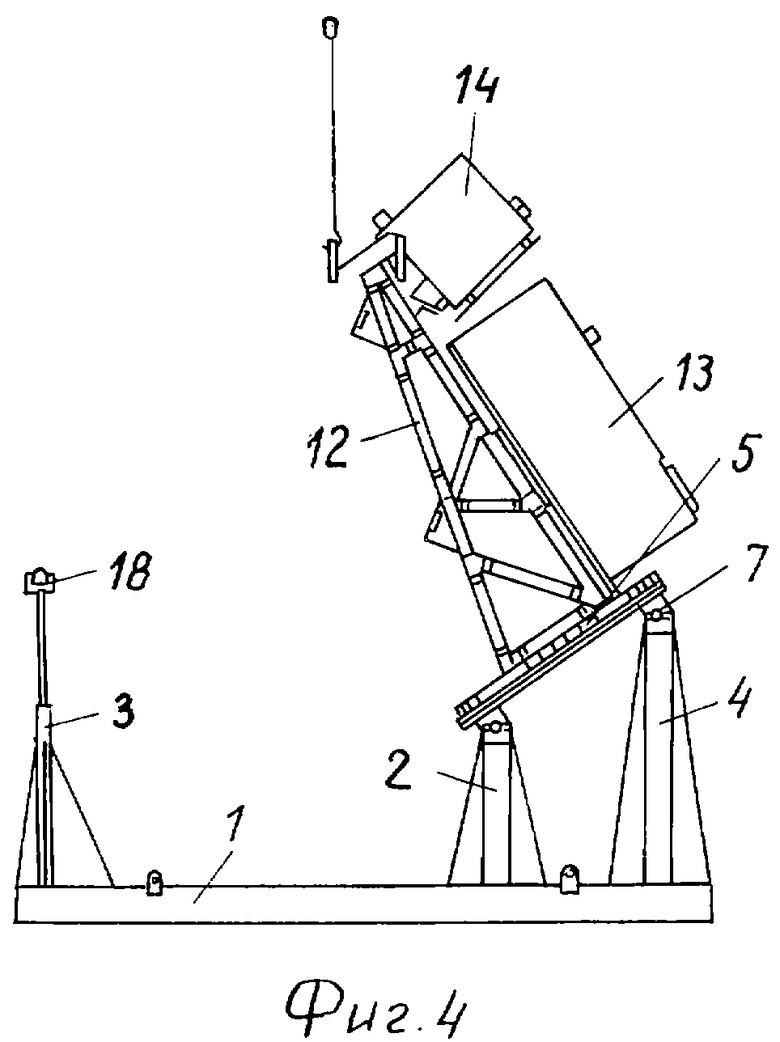
На фиг. 4 показан транспортно-технологический агрегат в процессе сборки пакета космических аппаратов при повороте платформы на опорных стойках до опирания о технологические упоры.
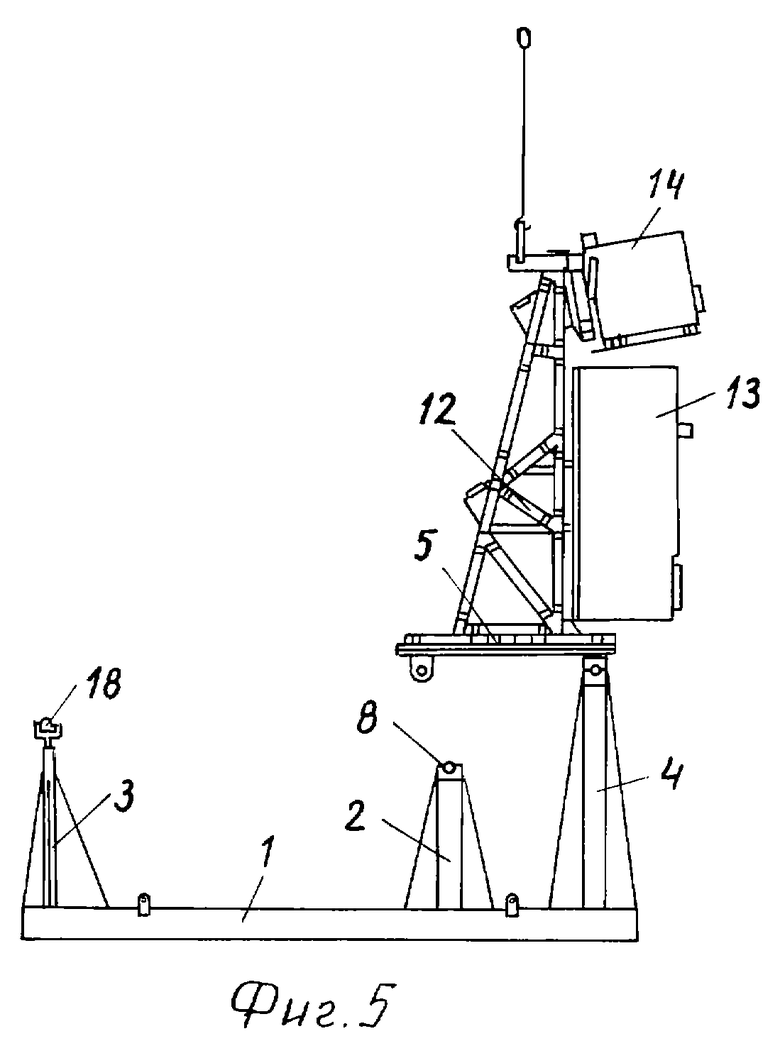
На фиг. 5 изображен транспортно-технологический агрегат при переводе поворотной платформы в горизонтальное положение.
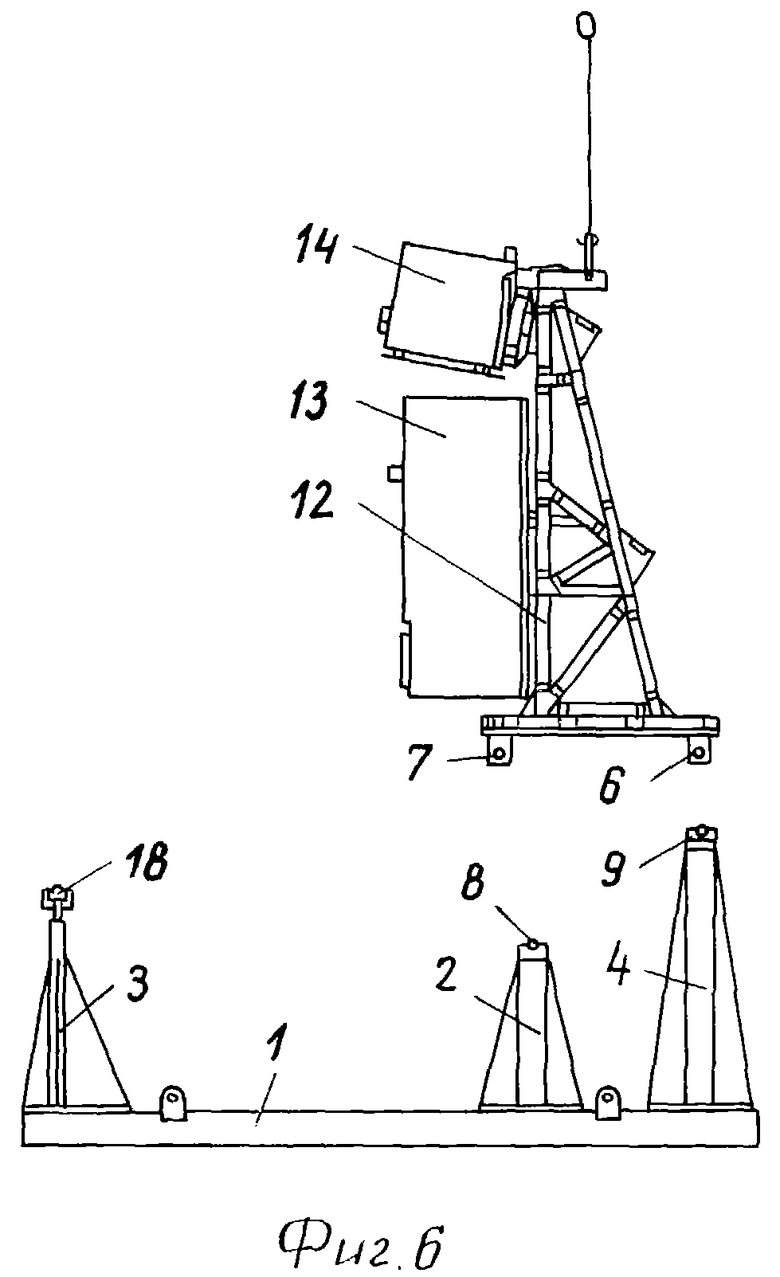
На фиг. 6 представлен транспортно-технологический агрегат при вращении поворотной платформы на 180o на крюке крапа.
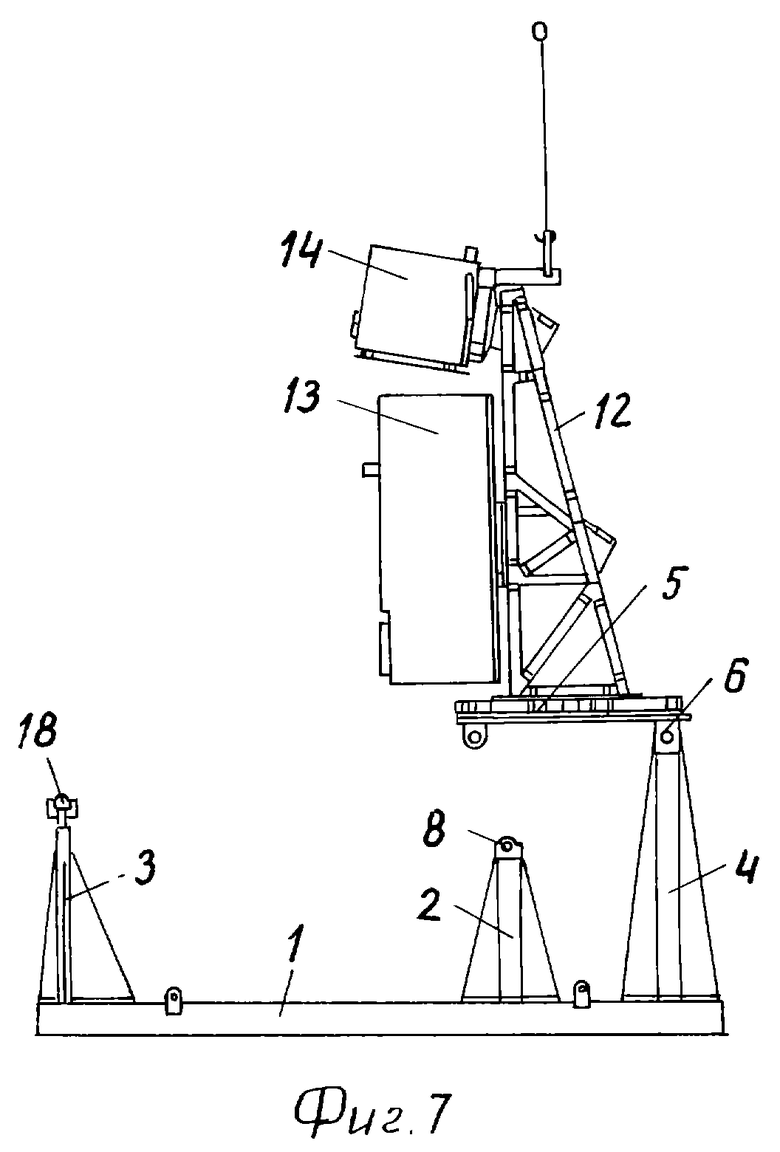
На фиг. 7 показана установка поворотной платформы на технологические упоры.
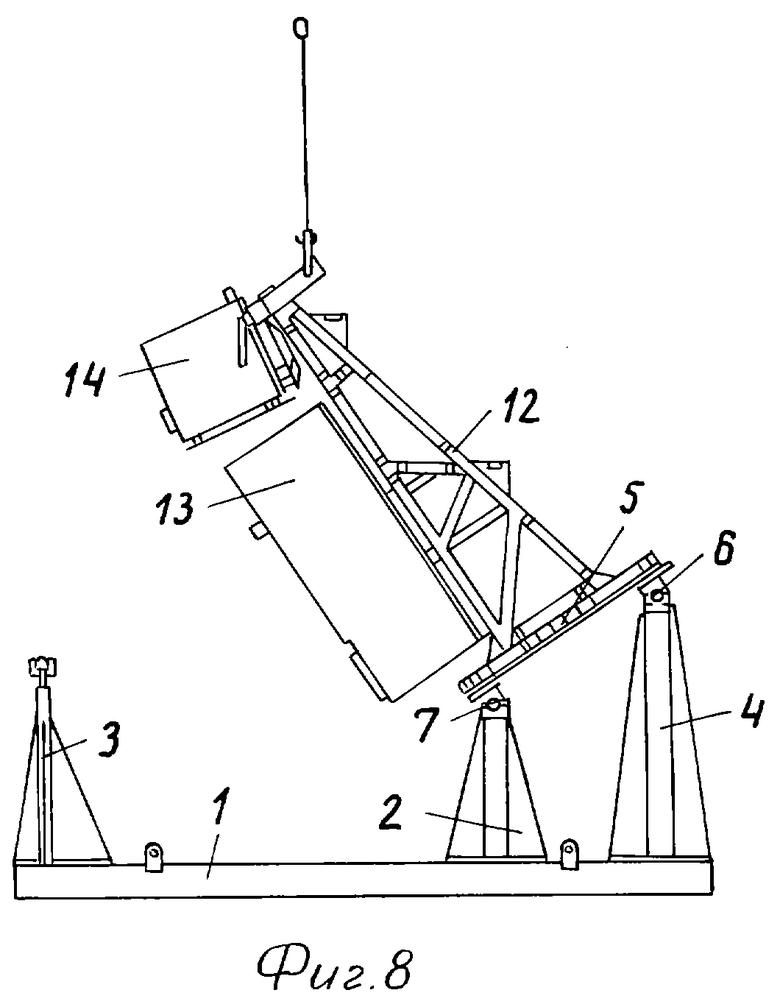
На фиг. 8 изображен транспортно-технологический агрегат при повороте платформы на технологических упорах до опирания об опорные стойки.
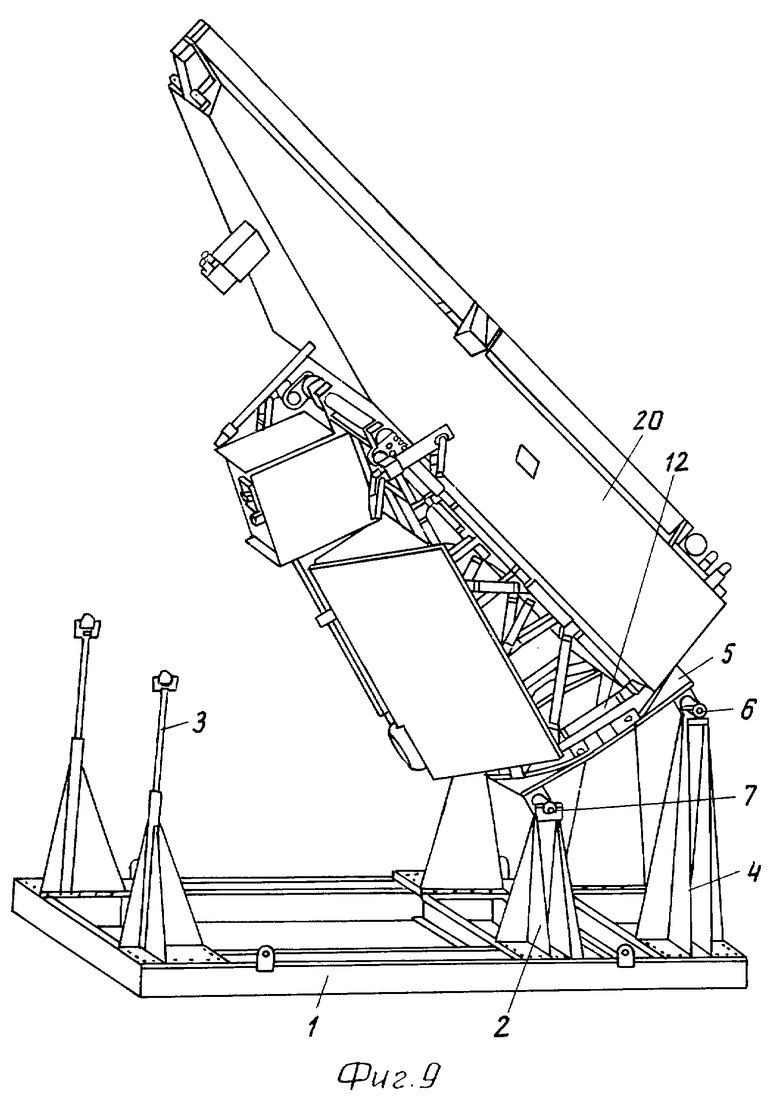
На фиг. 9 представлен транспортно-технологический агрегат при установке космического аппарата с опиранием поворотной платформы на опорные стойки и технологические упоры.
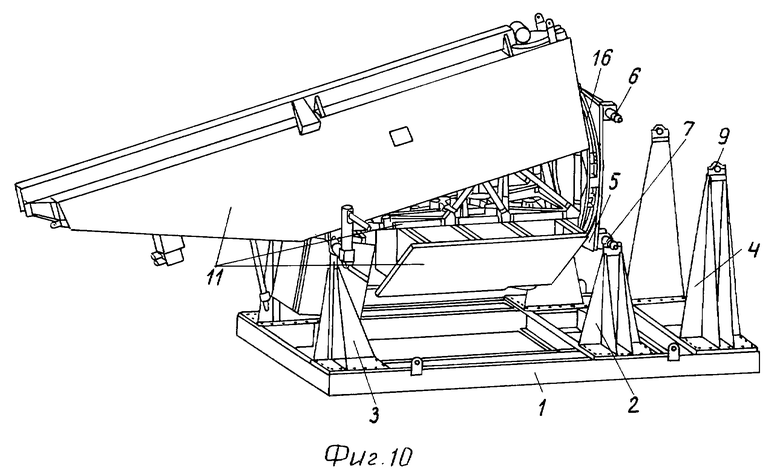
На фиг. 10 представлен транспортно-технологический агрегат с установленным пакетом космических аппаратов при вертикальном положении поворотной платформы.
Предлагаемое устройство содержит основание 1 (фиг.1) с закрепленными на нем опорными стойками 2 и регулируемыми штангами 3. На основании 1 со стороны опорных стоек 2 установлены технологические упоры 4. Опорные стойки 2 снабжены поворотной платформой 5. На поворотной платформе 5 выполнены передние 6 и задние 7 кронштейны. Передние кронштейны 6 установлены в приемных гнездах 8 опорных стоек 2 и размещены с возможностью их взаимодействия с приемными гнездами 9 (фиг.2) технологических упоров 4. Задние кронштейны 7 размещены с возможностью их взаимодействия с приемными гнездами 9 и 8 технологических упоров 4 и опорных стоек 2 соответственно. На поворотной платформе 5 выполнены узлы крепления 10 (фиг. 1) пакета космических аппаратов (полезной нагрузки) 11 (фиг.9). Расстояние между опорными стойками 2 и технологическими упорами 4 принято из условия размещения между ними при горизонтальном положении поворотной платформы 5 вертикальной плоскости, проходящей через центр масс поворотной платформы 5 с установленным на ней пакетом космических аппаратов 11 и перпендикулярной продольной оси основания 1. Опорные стойки 2 снабжены фиксаторами (условно не показаны) вертикального положения поворотной платформы 5. Высота технологических упоров 4 превышает высоту опорных стоек 2 и принимается из условия размещения между регулируемыми штангами 3 и опорными стойками 2 при опирании поворотной платформы 5 на опорные стойки 2 и технологические упоры 4 вертикальной плоскости перпендикулярной продольной оси основания 1 и проходящей через центр масс поворотной платформы 5 с установленной рамой полезной нагрузки 12 (фиг.2) и размещенными на ней по одну сторону относительно последней космическими аппаратами 13 и 14 (фиг.6).
Предлагаемое устройство функционирует следующим образом.
Исходное положение транспортно-технологического агрегата следующее: поворотная платформа 5 опирается на опорные стойки 2 и технологические упоры 4 (фиг. 1), при этом передние 6 и задние 7 кронштейны взаимодействуют соответственно с приемными гнездами 8 и 9 опорных стоек 2 и технологических упоров 4 соответственно.
Для установки рамы полезной нагрузки 12 поворотная платформа 5 переводится в вертикальное положение. При этом демонтируются хомуты 15 технологических упоров 4, поворотная платформа 5 (вручную) поворачивается на опорных стойках 2 до ее вертикального положения и стопорится в данном положении фиксаторами (условно не показаны). Затем краном (условно не показан) производится установка (фиг.2) на транспортно-технологический агрегат рамы полезной нагрузки 12. При этом стыковочное кольцо 16 рамы полезной нагрузки 12 стыкуется с поворотной платформой 5 (задействуются узлы крепления 10), а передняя балка 17 рамы полезной нагрузки 12 опирается на приемные гнезда 18 регулируемых штанг 3.
Затем при помощи крана обеспечивается установка (фиг.3) космических аппаратов 13 и 14 на верхнюю (для данного положения) плоскость рамы полезной нагрузки 12 и их последующая стыковка с соответствующими посадочными узлами (условно не показаны) рамы полезной нагрузки 12.
Поворотная платформа 5 расфиксируется относительно опорных стоек 2 и при помощи крана поворачивается (такелажные элементы крана крепятся за раму полезной нагрузки 12) на опорных стойках 2 до опирания (фиг.4) задних кронштейнов 7 о приемные гнезда 9 технологических упоров 4. Безударность кантования при этом обеспечивается за счет того, что центр масс кантуемой системы ("поворотная платформа 5 - рама полезной нагрузки 12 - космические аппараты 13 и 14") не переходит через ось вращения и до момента опирания поворотной платформы 5 о технологические упоры 4 находится между регулируемыми штангами 3 и опорными стойками 2. Устанавливаются хомуты 15 технологических упоров 4 и демонтируются хомуты 19 опорных стоек 2.
Затем краном поворотная платформа 5 с установленными на ней рамой полезной нагрузки 12 и космическими аппаратами 13 и 14 поворачивается (фиг.5) на технологических упорах 4 до горизонтального положения (поворотной платформы 5). В процессе данного кантования центр масс кантуемой системы ("поворотная платформа 5 - рама полезной нагрузки 12 - космические аппараты 13 и 14") пеpемещaетcя в направлении технологических упоров 4, но не переходит ось вращения, оставаясь между опорными стойками 2 и технологическими упорами 4 (это исключает динамический "бросок" кантуемой системы).
После этого демонтируются хомуты 15 технологических упоров 4. Поворотная платформа 5 краном поднимается вверх (до выхода задних кронштейнов 7 из приемных гнезд 9 технологических упоров 4) и на крюке крана вращается (фиг. 6) в горизонтальной плоскости на 180o.
Затем поворотная платформа 5 краном опускается (фиг.7) до вхождения ее передних кронштейнов 6 в приемные гнезда 9 технологических упоров 4. Устанавливаются хомуты 15 технологических упоров 4.
После этого поворотная платформа 5 краном поворачивается (фиг. 8) на технологических упорах 4 до вхождения ее задних кронштейнов 7 в приемные гнезда 8 опорных стоек 2. Устанавливаются хомуты 19 опорных стоек 2.
Затем при помощи крана на верхнюю (для данного положения) плоскость рамы полезной нагрузки 12 обеспечивается установка (фиг.9) космического аппарата 20 и его последующая стыковка с соответствующим посадочным узлом (условно не показан) рамы полезной нагрузки 12. Тем самым закончена сборка пакета космических аппаратов 11 в составе рамы полезной нагрузки 12, космических аппаратов 13, 14 и 20. В таком положении проводится обслуживание и, при необходимости, испытания (в том числе испытания механических систем на раскрытие) космических аппаратов 13, 14 и 20.
После проведения обслуживания и испытаний пакета космических аппаратов 11 демонтируются хомуты 15 технологических упоров 4 и поворотная платформа 5 с установленным на ней пакетом космических аппаратов 11 поворачивается краном (фиг. 10) на опорных стойках 2 до опирания передней балки 17 рамы полезной нагрузки 12 на приемные гнезда 18 регулируемых штанг 3.
Следует отметить, что в таком положении возможна установка на раму полезной нагрузки 12, в зависимости от направления (ориентации) соответствующего посадочного узла, и космического аппарата 20.
После этого поворотная платформа 5 закрепляется относительно опорных стоек 2 при помощи фиксаторов (условно не показаны).
Рама полезной нагрузки 12 с установленными на ней космическими аппаратами 13, 14 и 20 при помощи крана снимается с транспортно-технологического агрегата и стыкуется с ракетой-носителем (условно не показана). Отстыковка стыковочного кольца 16 рамы полезной нагрузки 12 от узлов крепления 10 поворотной платформы 15 производится при подстыкованной к раме полезной нагрузки 12 тросовой системе крана (условно не показана).
После снятия пакета космических аппаратов 11 с транспортно-технологического аппарата снимаются фиксаторы (условно не показаны) вертикального положения поворотной платформы 5. Поворотная платформа 5 поворачивается на опорных стойках 2 и укладывается (фиг. 1) на технологические упоры 4. На приемные гнезда 9 технологических упоров 4 устанавливаются хомуты 15. Тем самым транспортно-технологический агрегат подготовлен к проведению очередного цикла работ.
Таким образом, предложенный транспортно-технологический агрегат имеет существенные отличия от ранее известных устройств и позволяет расширить их функциональные возможности и повысить эксплуатационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТУПЕНЬ РАКЕТЫ | 2000 |
|
RU2193994C2 |
| КОНТЕЙНЕР | 2000 |
|
RU2209542C2 |
| ШПРИЦ | 2000 |
|
RU2202378C2 |
| КОНТЕЙНЕР | 2000 |
|
RU2217362C2 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИЙ АГРЕГАТ | 2003 |
|
RU2252179C2 |
| ШПРИЦ | 2000 |
|
RU2203688C2 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ БОЛЬНОГО В ВАННУ | 2000 |
|
RU2189211C2 |
| СПОСОБ ФОРМИРОВАНИЯ ГРАВИТАЦИОННОГО УСТРОЙСТВА И ГРАВИТАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2223895C2 |
| КОНТЕЙНЕР | 2000 |
|
RU2209165C2 |
Изобретение относится к оборудованию, преимущественно для сборки, обслуживания и технологической подготовки крупногабаритных изделий, например блоков (пакетов) космических аппаратов (КА). Согласно изобретению агрегат содержит основание с опорными стойками, регулируемыми штангами и технологическими упорами. Стойки снабжены поворотной платформой с возможностью ее опирания на упоры. Высота упоров превышает высоту стоек. КА устанавливают на раму полезной нагрузки, закрепленную на поворотной платформе, при различных положениях последней. При повороте платформы из вертикального положения в наклонное и из наклонного в горизонтальное и наоборот - ось поворота платформы переходит с опорных стоек на ось поворота на технологических упорах и наоборот. Изобретение обеспечивает повышение функциональных и эксплуатационных характеристик оборудования при установке в различных зонах рамы полезной нагрузки КА с различными наклонами. 10 ил.
Транспортно-технологический агрегат, содержащий основание с закрепленными на нем опорными стойками и регулируемыми штангами для крепления пакета космических аппаратов, отличающийся тем, что на основании со стороны опорных стоек установлены технологические упоры, а опорные стойки снабжены поворотной платформой с выполненными на ней узлами крепления пакета космических аппаратов и снабженной передними кронштейнами, установленными в приемных гнездах опорных стоек, при этом передние кронштейны поворотной платформы размешены с возможностью их взаимодействия с приемными гнездами технологических упоров, причем на поворотной платформе установлены задние кронштейны с возможностью их взаимодействия с приемными гнездами технологических упоров и опорных стоек, а расстояние между опорными стойками и технологическими упорами принимается из условия размещения между ними при горизонтальном положении поворотной платформы вертикальной плоскости, проходящей через центр масс поворотной платформы с установленным на ней пакетом космических аппаратов и перпендикулярной продольной оси основания, при этом высота технологических упоров превышает высоту опорных стоек и принимается из условия размещения между регулируемыми штангами и опорными стойками, при опирании поворотной платформы на опорные стойки и технологические упоры, вертикальной плоскости, перпендикулярной продольной оси основания и проходящей через центр масс поворотной платформы с установленной на ней рамой полезной нагрузки, на которой размещены по одну сторону относительно рамы космические аппараты.
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Железобетонные плиты для полов, тротуаров, укрепления откосов и т.п. | 1928 |
|
SU9600A1 |
| чертеж, КБ "Полет", 1998 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Технология сборки и испытаний космических аппаратов./Под ред | |||
| И.Т.БЕЛЯКОВА и И.А.ЗЕРНОВА | |||
| - М.: Машиностроение, 1990, с.268-276 | |||
| КОСМИЧЕСКИЙ АППАРАТ | 1992 |
|
RU2072951C1 |

