Известны устройства для автоматического управления поездом, содержащие пульт машиниста, блок управления программой, блок постоянной и сменной программы, осевой датчик, напольный датчик, усилитель, блок поддержания постоянной скорости, блок времени, разгона и торможения.
Цель изобретеиия - упростить устройство и обеспечить точность графика движения поезда с оптимальным режимом ведения. Достигается это тем, что в предложенном устройстве установлены блоки корректировки момента отключения тяговых двигателей по скорости и по времени, входы которых нодключены к блоку времени, а выходы - к блоку разгона, а также тем, что, с целью исключения ошибок при определении корректируюН1ИХ воздействий, блок разгона подключен к блоку времени, который связан с пультом маи иниста.
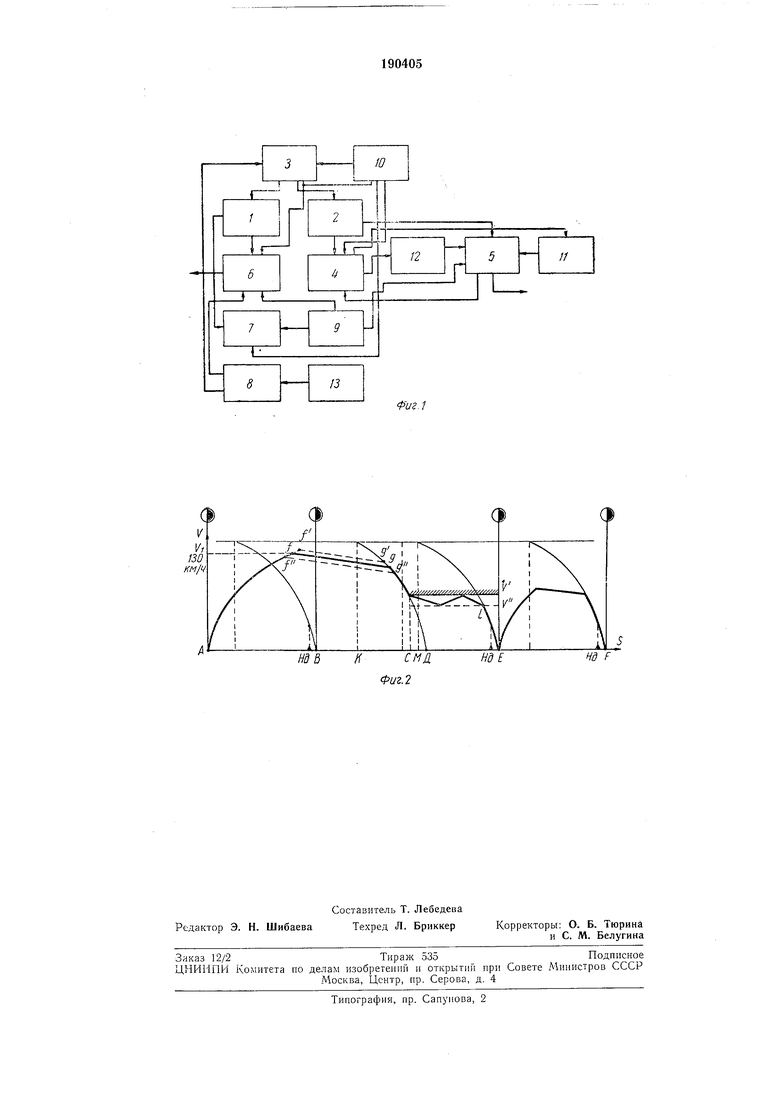
Блок-схема устройства для автоматического управления поезда представлена на фиг. 1; на фиг. 2 показаны кривые движения поезд для случаев опоздания, опережения, точного соблюдения графика, вынолнения ограничения и остановочного торможения.
Устройство содержнт: блок ноетоянной программы /, блок 2 смегп-юй программы, блок 5 унравлення программой, блок 4 времени, блок 5 разгона, блок 6 торможення, блок 7
поддержания постоянной скорости, усилитель 8, осевой датчик 9, пульт 10 машиниста, блок И корректировки по времени, блок 12 корректировки по скорости и напольный корректирующий датчик 13, установленный иа пути вблизи места точной остановки.
Пример движения ноезда при выполнении им графика по фиг.-2. Па станции Л машинисг нажимает кнопку «пуск на пульте машиниста (фиг. 1), и сигнал из пульта поступает на блок 3 управления программой. Блок 3 переключает программу, после чего из блока 1 производится запись пути участка АД (фиг. 2) в блок 6 торможения (фнг. 1), так
как в блоке сменной программы 2 имеется
указание об отмене остановки на станции В.
Из блока 2 (фиг. 1) производится запись
конечного значения разгонной скорости в блок
разгона, после чего поступает сигнал на сравнекие программного и истинного времени в блок времени, результат которого записывается в блок 11, либо через блок 12 поступает в блок разгона, уменьшая конечное значение скорости разгона пропорциопально времени
опережения графнка. Поезд начинает разгоняться, и в течение разгона сигналы с датчика 9 оборотов колеса постунают в блок разгона и блок торможения. В блоке разгона производится замер скорости поезда и сравграммы и скорректированной в результате определения расхождения программного и истинного времени.
Таким образом, поезд перейдет в режим выбега в точке / (фит. 2), если расхождение времен не было зафиксировано, в точке f, если было опережеиие, и /°, если было опоздание.
В блоке 6 (фиг. 1) происходит но сигналам датчика оборотов колеса отсчет расстояния, остающегося до точки Д (фиг. 2). В точке В происходит переключение программы, сброс всех ошибок, перезапись расстояния и проверка времени. В точке К блок торможения подключает тормозную кривую по пути на сравнение с существующей скоростью ноезда.
В момент совпадения скорости поезда со скоростью заданной тормозной кривой в точках g, g или g блок 6 (фиг. 1) включает торможение и ведет поезд по принципу слежения за тормозной кривой. В точке С (фиг. 2) при достижении поездом скорости ограничения сигнал из блока торможения поступает в блок 3 (фиг. 1), который нереключает программу дв:;жения на участок СЕ (фиг. 2). На участке СЕ программой подключается блок 7 (фиг. 1) поддержания У-const и поезд идет со скоростью, ограниченной пределами V и V, задаваемыми блоком 7. В точке / (фиг. 2) скорость ноезда
становится равной скорости, задаваемой тормозной кривой, включенной в точке М, и поезд включает тор.можение. В момент прохода поездом Нд (напольного датчика 13) его сигнал через усилитель 8 (фиг. 1) поступает в блок торможения, где сбрасывается по пути и точно корректируется тормозная кривая. Далее поезд останавливается, регулируя тормозное усилие но сигналам системы следящей за скорректированной кривой.
Предмет изобретения
1.Устройство для автоматического управления поездом, содержащее пульт мащиниста, блок унравления программой, блок постоянной и сменной программы, осевой датчик, напольный датчик, усилитель, блок иоддержания постоянной скорости, блок времени, разгона и торможения, отличающееся
тем, что, с целью упрощения устройства и обеспечения точности графика движения ноезда с оптимальным режимом ведения, установлены блоки корректировки момента отключения тяговых двигателей но скорости и но
времени, входы которых нодключены к блоку времени, а выходы - к блоку разгона.
2.Устройство по п. 1, отличающееся тем, что, с целью исключения ошибок при определении корректирующих воздействий, блок
разгона подключен к блоку времени, который связан с пультом машиниста.
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 1967 |
|
SU190406A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ МЕТРОПОЛИТЕНА | 1969 |
|
SU241497A1 |
| СПОСОБ ОРГАНИЗАЦИИ ВИЗУАЛЬНОЙ СПРАВОЧНО-ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ МАШИНИСТА ПОЕЗДА | 2010 |
|
RU2494905C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| БОРТОВОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ АВТОТОРМОЗОВ ПОЕЗДА В ПУТИ СЛЕДОВАНИЯ | 2005 |
|
RU2293673C2 |
| Комплекс информационного обеспечения системы автоматического управления торможением поезда | 2018 |
|
RU2697630C1 |
| Устройство и способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения | 2022 |
|
RU2822934C2 |
Нд F
