Изобретение относится к горному делу и геологии и может быть эффективно использовано для размещения геологоразведочного и добычного оборудования при освоении минерально-сырьевых ресурсов шельфа и Мирового океана.
Известна подводная платформа, включающая соединенный с плавсредством кабель-тросом пробоотборник, закрепленный на вертикальной раме подвижно, которая, в свою очередь, жестко установлена на станине (см. А.С. СССР 920438, кл. Е 02 D 1/04, 1984).
Основным недостатком известного технического решения является возможность его опрокидывания во время шторма и дрейфа плавсредства, что приводит к потере устройства.
Известна также подводная платформа, включающая раму с опорами и якорь, выполненный в виде П-образной стойки, охватывающей раму и скрепленной с нею нижними концами шарнирно и связанной своей верхней частью с плавсредством посредством кабель-троса (см. А.С. СССР 1051202, кл. Е 21 В 7/12, 1983).
Прототипу присущи недостатки, главными из которых являются: низкая надежность эксплуатации, связанная с вероятным опрокидыванием во время шторма и дрейфа плавсредства, приводящая к его потере или выходу из строя оборудования, установленного на раме; невозможность проходки вертикальных скважин при наличии сложного микрорельефа поверхности дна, что искажает получаемую геологическую информацию; невозможен визуальный дистанционный обзор за работой механизмов и выполнением технологических процессов, приводящих к совершению спускоподъемных операций, не несущих информации.
Задача изобретения - предотвращение возможности возникновения аварийных ситуаций, связанных с потерей и опрокидыванием оборудования в штормовых условиях и при дрейфе плавсредства.
Поставленная задача достигается тем, что подводная платформа, включающая раму с опорами и якорь, выполненный в виде П-образной стойки, охватывающей раму и скрепленной с нею нижними концами шарнирно и связанной своей верхней частью с плавсредством посредством кабель-троса, отличается тем, что она снабжена понтоном с регулируемой плавучестью, связанным с опорами рамы посредством механизма стабилизации, выполненного в виде раздвижных силовых цилиндров, как минимум трех, предпочтительно гидравлических, концы которых жестко закреплены на опорах рамы и шарнирно закреплены на понтоне предпочтительно посредством шаровых шарниров. Кроме того, понтон выполнен в виде тора из фасонных элементов и отрезков труб, при этом внутренняя поверхность тора разделена на изолированные друг от друга отсеки, часть которых использована для размещения рабочего агента раздвижных силовых цилиндров, с которыми отсеки сообщены через гидроприводы. Кроме того, рама выполнена из элементов арочной конструкции в форме усеченной трехгранной пирамиды, а опоры - У-образной формы и жестко закреплены на раме, при этом в верхней части рамы закреплены элементы плавучести, например блоки пенополиуретана, причем внутренние размеры рамы превышают габаритные размеры геологоразведочного и добычного оборудования. Кроме того, П-образная стойка снабжена большими лапами, закрепленными в ее нижней части, при этом продольные оси больших лап расположены в одной плоскости с продольными осями каждой ноги стойки. Кроме того, П-образная стойка снабжена двумя малыми лапами, перпендикулярными относительно плоскости, проходящей через оси ног П-образной стойки, закрепленными в ее верхней части и снабженными грузом-утяжелителем.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию "новизна".
Признаки отличительной части формулы изобретения решают следующие функциональные задачи.
Признаки первого пункта формулы обеспечивают регулировку вертикальности оси бурового оборудования независимо от положения платформы на грунте. Снабжение рамы тремя гидроцилиндрами дает возможность ее перемещения вместе с якорем в заданном направлении, а соединение штоков с понтоном с помощью шаровых шарниров позволяет компенсировать ее уклон по углам крена и дифферента платформы.
Признаки второго пункта формулы изобретения обеспечивают возможность размещения гидроприводов непосредственно на самом устройстве, а потому отпадает необходимость подвода рабочего агента с поверхности, кроме того, этот признак способствует тому, что понтон старается занять горизонтальное положение над дном моря (при совместной "работе" с признаками 4-го и 5-го пунктов).
Признак третьего пункта формулы изобретения способствует автоматическому сохранению устройством положения, обеспечивающего вертикальность оси бурового оборудования.
Признаки четвертого и пятого пунктов формулы изобретения обеспечивают качественное сцепление якоря с грунтом и исключают опирание понтона непосредственно на грунт (понтон оказывается подвешен над грунтом на шарнирах якоря) и тем самым создают условия для эффективной "работы" по приданию вертикальности оси бурового инструмента для признаков остальных пунктов формулы изобретения.
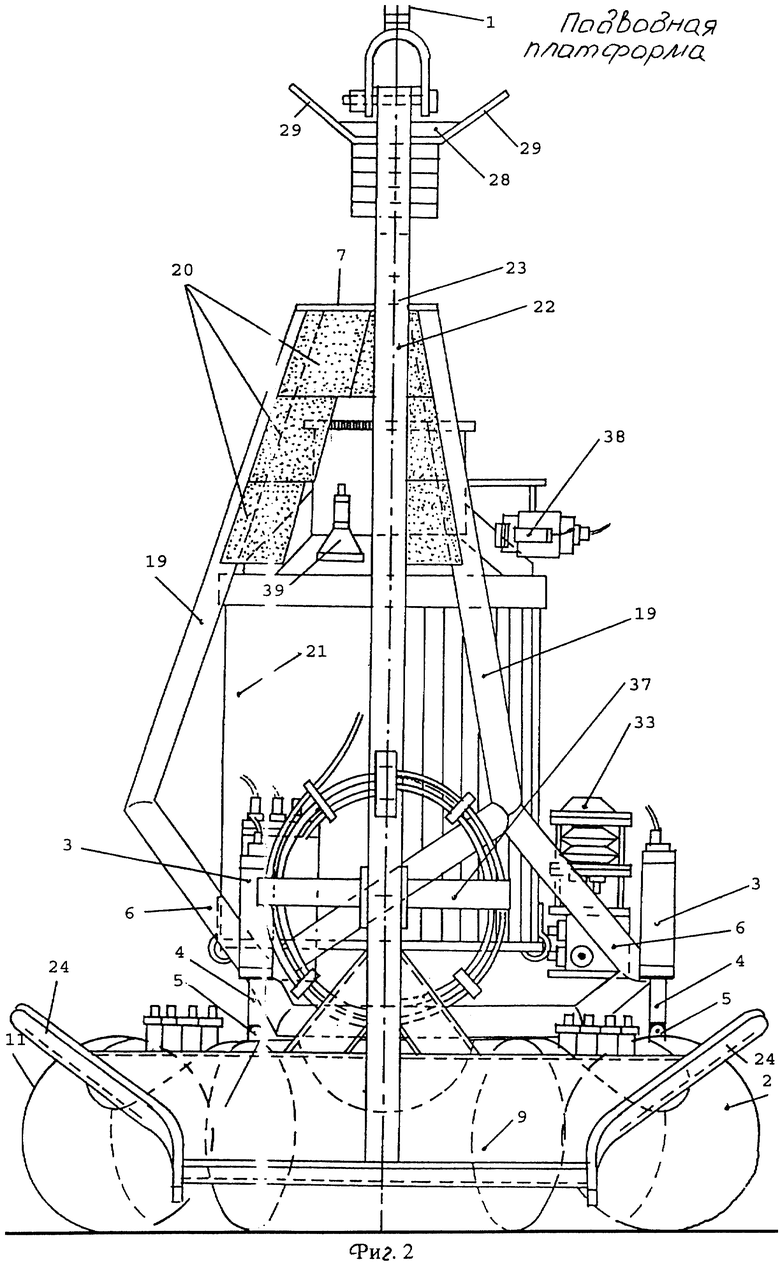
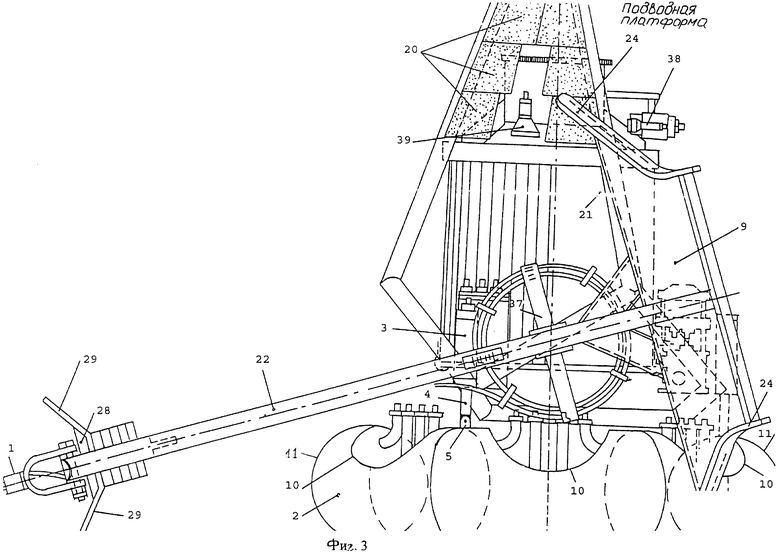
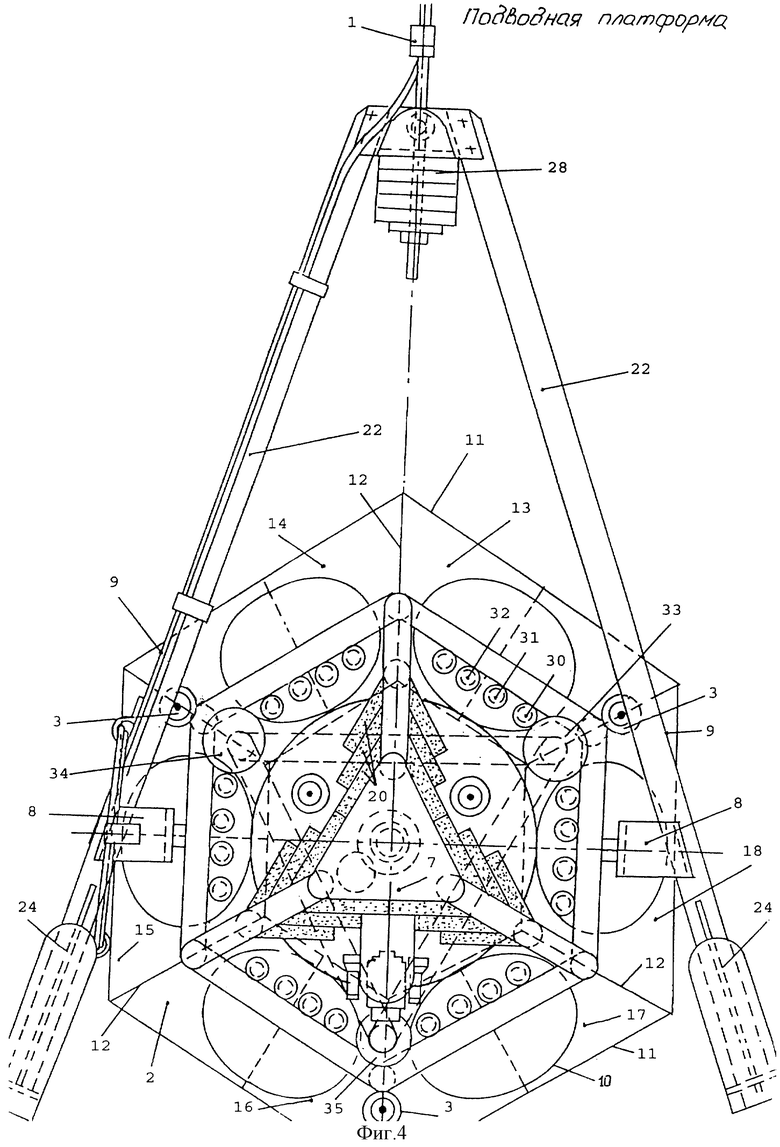
Изобретение поясняется чертежами, где на фиг.1 показан общий вид платформы, на фиг. 2 изображен общий вид платформы при ее повороте на 90o, на фиг. 3 и 4 показано положение якоря при заглублении лап в породы соответственно в вертикальной плоскости и в плане.
Подводная платформа предназначена для размещения геологоразведочного и добычного оборудования и включает соединенные между собой кабель-тросом 1 через механизм стабилизации положения платформы на дне океана плавсредство (на чертеже не показано) и понтон 2. Механизм стабилизации положения платформы содержит три гидроцилиндра 3 со штоками 4, которые через шаровые шарниры 5 соединены с понтоном 2. Корпуса гидроцилиндров 3 жестко соединены с опорами 6 рамы 7. На раме 7 с помощью двух шарниров 8 закреплен якорь 9.
Понтон 2 выполнен в виде тора из фасонных элементов 10 и отрезков труб 11, которые соединены между собой водонепроницаемыми перегородками 12. Таким образом, понтон разделен на секции, одна из которых 13 предназначена для масла, а остальные 14, 15, 16 и 18 используются как балластные емкости.
Рама 7 подводной платформы состоит из элементов арочной конструкции в форме усеченной трехгранной пирамиды. Основание пирамиды снабжено тремя У-образными опорами 6. На верхних торцевых частях элементов, являющихся ребрами 19 пирамиды, закреплены элементы плавучести (блоки пенополиуретана) 20. Внутренние размеры рамы 7 превышают габаритные размеры геологоразведочного и добычного оборудования 21.
Якорь 9 выполнен в виде П-образной конструкции с расположением стоек 22 симметрично и под наклоном к вертикальной оси 23 платформы с возможностью размещения лап 24 за пределами внешнего периметра понтона 2. Продольные оси 25 лап 24 расположены в одной плоскости с продольными осями 26 стоек 22, на которых они закреплены. Балка 27 якоря снабжена грузом-утяжелителем 28 с двумя малыми лапами 29, симметрично расположенными относительно плоскости, проходящей через продольные оси 26 стоек 22 (т.е. перпендикулярно ей).
Работа геологоразведочного и добычного оборудования на подводной платформе в безаварийном режиме эксплуатации осуществляется следующим образом.
На плавсредстве в нижнем основании рамы 7 оборудуют площадку, которую с помощью болтовых соединений крепят к конструктивным элементам рамы с возможностью ее замены при использовании оборудования другого типа. На площадке устанавливают геологоразведочное оборудование, например буровой станок. Добычное оборудование, в качестве которого может быть использован агрегат для разработки кобальтовых корок или сбора железомарганцевых конкреций (ЖМК), располагают на другой специально оборудованной площадке. Секцию 13 заполняют маслом и через патрубки 30, 31 и 32 соединяют с гидроприводами 33, 34 и 35 гидроцилиндров 3. Патрубок 36 соединяют с элементами гидропривода (на чертежах не показаны) добычного агрегата 21. Секции 14-18 в зависимости от глубины акватории и центровки платформы частично, перемежаемо или полностью заполняют водой. Кроме того, различными уровнями воды в секциях и перемежаемых их заполнением располагают массовый центр тяжести платформы с агрегатом на вертикальной оси 23, придавая тем самым платформе устойчивое равновесие. Кабель-трос 1 подключают к системе энергоснабжения плавсредства и аппаратуре дистанционного управления. Нижняя торцевая часть кабель-троса закреплена на стойке 22 и намотана на барабан 37, жестко установленный на стойке с возможностью поворота вместе с якорем. Через кабель-трос производится питание электродвигателей агрегата 21, гидроприводов 33, 34 и 35, а также телевизионной камеры 38 и светильника 39.
Затем производят спуск платформы в акваторию, при этом якорь 9 находится в положении устойчивого равновесия за счет расположения его центра тяжести ниже шарниров 8. В момент установки платформы на грунт лапы 24 якоря должны располагаться выше основания понтона 2, а штоки 4 задвинуты внутрь гидроцилиндров 3. Если поверхность дна представлена сложным микрорельефом, возможен крен и дифферент платформы вместе с агрегатом 21. Для избежания подобного явления включают соответствующие гидроприводы 33, 34 и 35 и подают масло во внутренние полости гидроцилиндров 3, которое, оказывая давление на поршни, выдвигает штоки на требуемую длину, при этом рама 7 и агрегат 21 отклоняются к вертикали. Такую же операцию выполняют в случае расположения лап якоря и понтона на поверхности дна в момент касания при отсутствии крена и дифферента платформы. За счет выдвижения штоков 4 гидроцилиндров 3 рама 7 вместе с якорем 9 поднимается вверх, освобождая при этом лапы 24. Контроль за установкой рамы и якоря осуществляют визуальным обзором с помощью телевизионной камеры 38. Кроме того, блоки пенополиуретана 20, установленные на верхних торцевых частях элементов рамы 7, способствуют вертикальному расположению рамы с оборудованием. Во время дрейфа плавсредства, а также при шторме происходит натяжение кабель-троса 1, при этом якорь 9 выводится из положения устойчивого равновесия и поворачивается вокруг осей шарниров 8. Во избежание обрыва кабель-троса он частично сматывается с барабана 37, который совершает с якорем вращение на определенный угол. Требуемая длина слабины кабель-троса достигается за счет большого диаметра барабана 37 при незначительном его повороте (до 120o). В конечном итоге две лапы 24 и одна из малых лап 29 якоря, которые направлены в одну сторону, внедряются в породы дна, препятствуя при этом опрокидыванию платформы за счет возникновения держащей силы.
При изменении направления дрейфа лапы якоря отрываются от пород. Натяжением кабель-троса якорь выводится в положение устойчивого равновесия, а затем симметрично расположенные лапы внедряются в породы.
Совершение колебательных движений якорем без передачи усилия натяжения кабель-троса платформе предотвращает ее опрокидывание, приводящее к потере оборудования и самой платформы.
После завершения процесса работы производят отрыв платформы от поверхности дна, частичный ее подъем и перестановку на заданное место.
Использование изобретения позволит получить значительный экономический эффект за счет исключения аварийных ситуаций в процессе промышленного применения платформы для производства горных и геологоразведочных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| МОРСКОЙ ДОБЫЧНОЙ КОМПЛЕКС | 2000 |
|
RU2182666C2 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОЙ РАЗРАБОТКИ | 2000 |
|
RU2182230C2 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС | 2000 |
|
RU2182229C2 |
| АГРЕГАТ ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2000 |
|
RU2181838C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070133C1 |
| КОМПЛЕКС ДЛЯ СПУСКА И ПОДЪЕМА ОБОРУДОВАНИЯ ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МОРЕЙ | 2023 |
|
RU2814109C1 |
| СПОСОБ РАЗРАБОТКИ ПОДВОДНОЙ РОССЫПИ | 1997 |
|
RU2131037C1 |
Изобретение может быть использовано для размещения геологоразведочного и добычного оборудования при освоении минерально-сырьевых ресурсов шельфа и Мирового океана. Задача: предотвращение возможности возникновения аварийных ситуаций, связанных с потерей и опрокидыванием оборудования в штормовых условиях и при дрейфе плавсредства, обеспечение возможности бурения вертикальных скважин вне зависимости от рельефа дна. Сущность: подводная платформа, включающая раму с опорами и якорь, выполненный в виде П-образной стойки, охватывающей раму, скрепленной с нею нижними концами шарнирно и связанной своей верхней частью с плавсредством посредством кабель-троса, отличается тем, что она снабжена понтоном с регулируемой плавучестью, связанным с опорами рамы посредством механизма стабилизации, выполненного в виде раздвижных силовых цилиндров, как минимум трех, предпочтительно гидравлических, концы которых жестко закреплены на опорах рамы и шарнирно закреплены на понтоне предпочтительно посредством шаровых шарниров. Кроме того, понтон выполнен в виде тора из фасонных элементов и отрезков труб, при этом внутренняя поверхность тора разделена на изолированные друг от друга отсеки, часть которых использована для размещения рабочего агента раздвижных силовых цилиндров, с которыми отсеки сообщены через гидроприводы. Кроме того, рама выполнена из элементов арочной конструкции в форме усеченной трехгранной пирамиды, а опоры - У-образной формы и жестко закреплены на раме, при этом в верхней части рамы закреплены элементы плавучести, например блоки пенополиуретана, причем внутренние размеры рамы превышают габаритные размеры геологоразведочного и добычного оборудования. Кроме того, П-образная стойка снабжена большими лапами, закрепленными в ее нижней части, при этом продольные оси больших лап расположены в одной плоскости с продольными осями каждой ноги стойки. 4 з.п. ф-лы, 4 ил.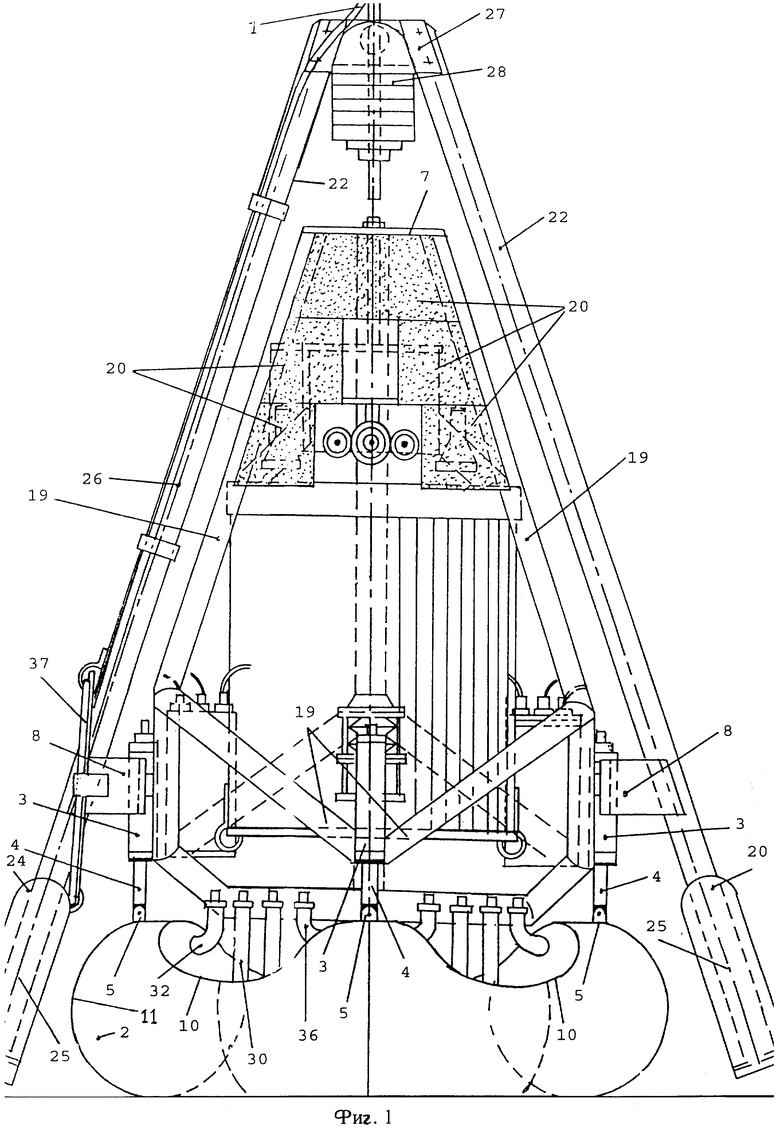
| Подводная буровая установка | 1982 |
|
SU1051202A1 |
| ЗАТАПЛИВАЕМЫЙ ПОНТОН МОРСКОЙ БУРОВОЙ УСТАНОВКИ | 0 |
|
SU369240A1 |
| ЗАТАПЛИВАЕМЫЙ ПОНТОН МОРСКОЙ БУРОВОЙ УСТАНОВКИ | 0 |
|
SU376549A1 |
| Способ установки морской стационарной платформы на дно моря | 1978 |
|
SU882421A3 |
| Подводная буровая установка | 1986 |
|
SU1448022A1 |
| Подводная буровая установка | 1987 |
|
SU1559088A1 |
| СПОСОБ СООРУЖЕНИЯ И ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1998 |
|
RU2140516C1 |
| US 3442339 A, 06.05.1969. | |||
