Изобретение относится к судоподъемным и аварийно-спасательным работам на морских и внутренних водоемах.
Известны способы подъема затонувших объектов с помощью подъемно-транспортных устройств с балластными цистернами. Например, известен «Способ подъема затонувших судов из больших глубин» по заявке РФ №93018262/11 публикация 1995 г., МПК В63С 7/08. Корпус поднимаемого судна охватывают жестким каркасом, а к раме каркаса крепят герметичные понтоны, которые спускают при помощи специального контейнера-носителя, заполняемого балластом из сыпучего материала.
Известен также «Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления» по патенту РФ № 2238876, МПК В63С 7/06, который выбран в качестве прототипа.
Способ включает позиционирование П-образного подъемно-транспортного устройства (ПТУ), имеющего положительную плавучесть под водой, с помощью подруливающих устройств в вертикальной и горизонтальной плоскостях над поднимаемым объектом, опускание на последний с размещением его между вертикальными секциями ПТУ, центрирование его относительно поднимаемого объекта путем перемещения ПТУ установленными на вертикальных секциях привальными рычагами устройства центрирования после выдвижения их гидроцилиндрами навстречу друг другу до установления динамического контакта с поднимаемым объектом. Затем ПТУ опускают до контакта его горизонтальной секции с поднимаемым объектом и захватывают последний путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней частью этого объекта опорных консолей устройств захвата, расположенных в нижней части каждой вертикальной секции. После этого поднимают ПТУ с поднимаемым объектом над грунтом и буксируют их полностью или частично под водой.
Такое выполнение работ ориентировано на наличие жесткого корпуса поднимаемого объекта и невыполнимо в случае его маложесткой конструкции (например, при подъеме артефактного судна из дерева). Кроме того, конструктив ПТУ сложен и дорог в исполнении, а также не предусматривает целенаправленного перемещения вымываемого грунта при захвате объекта.
Предлагаемое изобретение в части способа направлено на решение технической задачи, связанной с повышением надежности позиционирования подъемного устройства относительно поднимаемого объекта при наличии течения без обжатия его корпуса с одновременным сбором и фракционированием вымываемого из-под него грунта с целью исключения потери элементов поднимаемого объекта.
В заявляемом способе выполнения подводных подъемно-транспортных операций имеющее положительную плавучесть и замкнутое по наружному периметру подъемно-транспортное устройство (ПТУ), содержащее по крайней мере две симметрично расположенные относительно центра масс ПТУ группы понтонов, позиционируют под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом и далее опускают на последний, размещая его внутри замкнутого контура с дополнительным центрированием подъемного устройства относительно объекта, фиксируют ПТУ на дне за счет создания отрицательной плавучести и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней его частью опор на консолях устройства захвата, расположенных в нижней части подъемно-транспортного устройства, причем выдвижение осуществляют в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости устройства и пересекающихся в последней, после этого выводят объект из соприкосновения с грунтом и после балластировки поднимают подъемно-транспортное устройство с поднимаемым объектом на поверхность, дополнительно найтуют последний к устройству, устанавливают, закрепляя по наружному периметру, пластырь на нижний обрез устройства с поднимаемым объектом, закрывают их натягиваемым на верхний обрез покрывалом и буксируют их, обеспечивая нахождение поднятого объекта частично или полностью в воде.
В частном случае, имеющее положительную плавучесть ПТУ позиционируют в вертикальной и горизонтальной плоскостях относительно поднимаемого объекта с созданием управляющих сил на связях лебедок с предварительно установленными на дне якорями.
Кроме того, для снижения сопротивления грунта, а также для образования надежной самоцентрирующей опоры поднимаемому объекту, выдвижение консолей устройства захвата и начальный подъем (отрыв от грунта) устройства с захваченным объектом сопровождают местным размывом грунта под поднимаемым объектом с одновременным отсосом возникающей пульпы и подачей ее на устройство отделения от воды и сбора твердой ограниченной по минимальным габаритам фракции пульпы.
При отрыве ПТУ с поднимаемым объектом от грунта для нейтрализации сил сцепления с последним одновременно включают все устройства размыва грунта и производят пульпоотсос.
Технический результат для заявляемого устройства такой же, как и для осуществления одного из действий способа.
Способ реализует подъемно-транспортное устройство, замкнутое по наружному периметру и имеющее устройство захвата поднимаемого объекта, включающее выдвижные опорные консоли в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости ПТУ с возможностью образования опорной призмы для поднимаемого объекта при выдвинутом положении этих консолей, на вводимых под поднимаемый объект кромках которых выполнены форсунки для подачи воды под давлением для размыва грунта, а также симметрично расположенные относительно его центра масс группы понтонов с системой подачи в них и сброса из них воздуха, снабжено лебедками, связанными с располагаемыми на дне якорями.
При целесообразности ПТУ оснащают, по крайней мере, одним пульпонасосом, связанным пульпопроводами с зоной размыва грунта под поднимаемым объектом и с устройством отделения и сбора твердой фракции пульпы.
В частном случае ПТУ снабжено закрепляемыми по наружному периметру устанавливаемым на нижний обрез устройства с поднимаемым объектом пластырем и покрывалом, закрывающим верхний обрез устройства.
Изобретение поясняется чертежами.
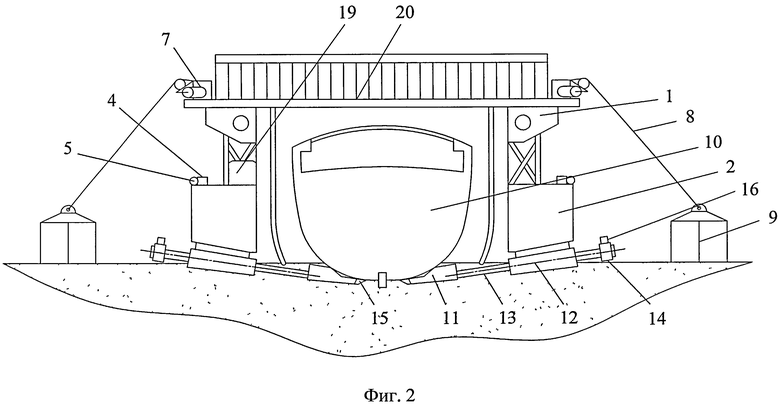
На фиг.1 показан общий вид подъемно-транспортного устройства в плане, на фиг.2 - поперечный разрез ПТУ.
Способ выполнения подводных подъемно-транспортных операций выполняется с помощью замкнутого в плане по наружному периметру подъемно-транспортного устройства 1 (фиг.1), которое может перемещаться в надводном и подводном положениях и содержит две симметрично расположенные относительно центра масс ПТУ понтонов 2 (Фиг.1 и 2), снабженные клапанами 3 вентиляции и клапанами 4 продувки, трубопроводом 5 и магистралью 6 (Фиг.1), связанные с воздухобаллонной станцией обеспечивающего судна. По углам ПТУ установлены на непоказанных пружинных опорах грузовые лебедки 7, тросами 8 или якорными цепями соединенные с якорями 9, разнесенными относительно поднимаемого объекта 10. Устройства захвата объекта 10 выполнены в виде стапельных опор 11 (Фиг.2), закрепленных на выдвигаемых гидроцилиндрами 12 консолях 13. Работа гидроцилиндров 12 обеспечивается насосами 14. На передних (входящих под объект 10) кромках опор 11 размещены форсунки 15 подачи воды под давлением от насосов 16.
Внутри ПТУ расположены пульпопроводы 17 (Фиг.1), связанные через пульпонасосы 18 с сетчатыми отстойниками 19 (Фиг.2).
В верхней части ПТУ смонтированы огражденные леерами площадки 20. Питание насосов и дистанционное управление лебедками и клапанами понтонов осуществляются по кабелю 21 (Фиг.1) от систем обеспечивающего судна.
ПТУ 1 предварительно позиционируют относительно поднимаемого объекта 10 с помощью лебедок 7 выборкой-подачей тросов 8, связанных с заранее установленными якорями 9.
Затем, манипулируя клапанами 3 вентиляции и клапанами 4 продувки секций понтонов 2, обеспечивают положение ПТУ на ровном киле с малой положительной плавучестью.
Управляемо работая лебедками 5, ПТУ притапливают, позиционируют под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом 10 и постепенно опускают на последний, размещая его внутри ПТУ. После посадки ПТУ на грунт устройству придают отрицательную плавучесть, чем окончательно фиксируют его относительно объекта 10. Затем захватывают поднимаемый объект путем одновременного попарного выдвижения консолей 13 с опорами 11 до их контакта с поднимаемым объектом 10 при включенных насосах 16, подающих воду на форсунки 15. После установления надежного захвата при включенных насосах 14, 16 и 18, снижая тем самым сцепление объекта 10 с грунтом, планомерно продувают понтоны 2. ПТУ придают положительную плавучесть и осуществляют его отрыв от дна при необходимом контролируемом травлении тросов 8. Находящиеся на площадках 20 водолазы ограничивают возникающую положительную плавучесть при существенном обжатии непоказанных пружин под опорами лебедок 7. После отключения насосов 14, 16 и 18 и окончательной балластировке ПТУ 1 с объектом 10 производят их всплытие, соответствующим образом управляя лебедками 7, а также клапанами 3 вентиляции понтонов 2.
Оставляя поднятый объект 10 в воде, нижнюю часть ПТУ «затягивают» не показанным на фигурах пластырем, а верхнюю часть закрывают непоказанным покрывалом. Этим обеспечивается сохранность поднятого объекта 10 при транспортировке сцепки ПТУ - объект 10.
Устройство захвата включает ряд стапельных опор 11 на консолях 13, закрепленных в нижней части ПТУ с возможностью их ввода вовнутрь его под углом α=50-80° к диаметральной плоскости устройства 1. Для этого в соответствующий гидроцилиндр 12 нагнетают воду насосом 14. Вода под высоким давлением подается к форсункам 15, расположенным на врезающихся кромках опор 11, с помощью насосов 16. Этим самым опоры при выдвижении не испытывают излишнего сопротивления грунта. Для исключения ненужного замутнения воды и потери элементов поднимаемого объекта 10 образующаяся пульпа насосами 18 подается в отстойники 19, фракционирующие твердый остаток по минимальному размеру.
При этом стапельные опоры 11 образуют призму, обеспечивающую отсутствие моментов, разрушающих объект. Предлагаемое изобретение за счет снижения ручного труда, обеспечивающего подъем водолазов, позволяет повысить надежность подъема и последующей транспортировки маложестких поднимаемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления | 2015 |
|
RU2619882C2 |
| Захватное устройство для заиленных подводных объектов и способ его использования при осуществлении подъема | 2016 |
|
RU2630040C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| Судоподъемный комплекс, твердотопливный газогенератор и способ судоподъема | 2018 |
|
RU2700431C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2011 |
|
RU2518683C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| СПОСОБ УСТАНОВКИ И ДЕМОНТАЖА ДОННОГО КОМПЛЕКСА ДЛЯ ВЫПОЛНЕНИЯ РАБОТ НА ШЕЛЬФЕ И КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381135C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ ЗАХВАТА И ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2000 |
|
RU2176966C2 |
Изобретение относится к судоподъемным и аварийно-спасательным работам на морских и внутренних водоемах. Способ включает позиционирование под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом подъемно-транспортного устройства (ПТУ), имеющего положительную плавучесть и замкнутого в плане по наружному периметру. ПТУ опускают на поднимаемый объект, размещая его внутри замкнутого контура с дополнительным центрированием ПТУ относительно объекта за счет создания отрицательной плавучести. Фиксируют на дне и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней его частью опорных консолей устройства захвата, расположенных в нижней части ПТУ. Выводят объект из соприкосновения с грунтом. Выполняют балластировку и поднимают ПТУ с объектом на поверхность, найтуют к устройству. Устанавливают, закрепляя по наружному периметру, пластырь на нижний обрез устройства с поднимаемым объектом и буксируют их. Подъемно-транспортное устройство, замкнутое по наружному периметру и имеющее устройство захвата поднимаемого объекта, содержит выдвижные опоры на консолях в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости ПТУ с возможностью образования опорной призмы для поднимаемого объекта при выдвинутом положении консолей. На кромках опор выполнены форсунки для подачи воды под давлением для размыва грунта, а также симметрично расположенные относительно центра масс подъемно-транспортного устройства группы понтонов с системой подачи в них и сброса из них воздуха. ПТУ снабжено лебедками, связанными с располагаемыми на дне якорями. Повышается надежность позиционирования подъемно-транспортного устройства. 2 н. и 4 з.п. ф-лы, 2 ил.
1. Способ выполнения подводных подъемно-транспортных операций, характеризующийся тем, что имеющее положительную плавучесть и замкнутое в плане по наружному периметру подъемно-транспортное устройство позиционируют под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом и далее опускают на последний, размещая его внутри замкнутого контура с дополнительным центрированием подъемного устройства относительно объекта за счет создания отрицательной плавучести, устройство фиксируют на дне и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней его частью опорных консолей устройства захвата, расположенных в нижней части подъемно-транспортного устройства, причем выдвижение осуществляют в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости устройства и пересекающихся в последней, после этого выводят объект из соприкосновения с грунтом, выполняют балластировку и поднимают подъемно-транспортное устройство с поднимаемым объектом на поверхность, дополнительно найтуют последний к устройству, устанавливают, закрепляя по наружному периметру пластырь на нижний обрез устройства с поднимаемым объектом, и буксируют их, обеспечивая нахождение последнего частично или полностью в воде.
2. Способ выполнения подводных операций по п.1, отличающийся тем, что производят позиционирование подъемно-транспортного устройства, имеющего положительную плавучесть, в вертикальной и горизонтальной плоскостях относительно поднимаемого объекта с созданием управляющих сил на связях лебедок с предварительно установленными на дне якорями.
3. Способ выполнения подводных операций по п.1 или 2, отличающийся тем, что выдвижение консолей устройства захвата, отрыв от грунта и начальный подъем устройства с захваченным объектом сопровождают местным размывом грунта под поднимаемым объектом с одновременным отсосом возникающей пульпы и подачей ее на устройство отделения от воды и сбора твердой, ограниченной по минимальным габаритам, фракции пульпы.
4. Подъемно-транспортное устройство, замкнутое по наружному периметру и имеющее устройство захвата поднимаемого объекта, включающее выдвижные опоры на консолях в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости подъемно-транспортного устройства с возможностью образования опорной призмы для поднимаемого объекта при выдвинутом положении этих консолей, на вводимых под поднимаемый объект кромках опор выполнены форсунки для подачи воды под давлением для размыва грунта, а также симметрично расположенные относительно центра масс подъемно-транспортного устройства группы понтонов с системой подачи в них и сброса из них воздуха, а также снабжено лебедками, связанными с располагаемыми на дне якорями.
5. Подъемно-транспортное устройство по п.4, включающее по крайней мере один пульпонасос, связанный пульпопроводами с зоной размыва грунта под поднимаемым объектом и с устройством отделения и сбора твердой фракции пульпы.
6. Подъемно-транспортное устройство по п.4 снабжено закрепляемым по наружному периметру устанавливаемым на нижний обрез устройства с поднимаемым объектом пластырем и покрывалом, закрывающим верхний обрез устройства.
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| US 3691977 А, 19.09.1972 | |||
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 2001 |
|
RU2246421C2 |
| US 3541986 A, 24.11.1970. | |||

