Изобретение относится к судостроению, в частности к конструкции и эксплуатации ледокольных судов.
Известен ледокол (см. описание к а.с. СССР 362733, кл. в 63 В 35/08), содержащий зубчатую наделку, расположенную на форштевне ниже ватерлинии, выполненную в виде ряда последовательно расположенных режуще-скалывающих зубьев, имеющих форму выдвинутого вперед вогнутого клина с заостренными кромками.
Недостатком технического решения является то, что упомянутая наделка на форштевне производит местное линейное разрушение льда в зоне передней кромки форштевня, мало сказывающееся на снижении общего ледового сопротивления ледокола, кроме того, при работе набегами форштевень с зубьями будет оказывать задерживающее действие при отходе ледокола назад.
Известно также техническое решение (см. патент России 2081027, кл. В 63 В 35/08), согласно которому судно, идущее вдоль кромки ледяного поля, подвергают искусственной качке путем попеременного заполнения балластных отсеков.
Недостаток его в том, что перекачка воды из балластных креновых цистерн является длительным процессом, достигаемые кренящие моменты судна небольшие и носят характер статических, амплитуда такой раскачки небольшая, период колебаний продолжительный, а угловая частота очень маленькая, кроме того, создать креновую качку, когда корпус судна подвержен обширному взаимодействию соприкосновения с кромкой льда - очень трудно, так как толщина льда, к которой прижат корпус, оказывает фиксирующее и демпфирующее действие силами трения.
В ледовом плавании создание динамичной принудительной поперечной (креновой) качки, в настоящее время, является неразрешимой проблемой.
Техническим результатом изобретения является повышение ледопроходимости ледокольного судна в тяжелых ледяных полях с одновременным сокращением его энерговооруженности.
Технический результат изобретения достигается тем, что в ледокольное судно для преодоления тяжелых ледяных полей, содержащее корпус с продольно-поперечным силовым набором, обшивкой бортов и главной палубой, надстройку, режуще-скалывающие зубья и источник энергии, дополнительно введены аэрокреновая система и система управления ею, при этом режуще-скалывающие зубья установлены по обоим бортам от носовой оконечности до кормы в районе ватерлинии, при этом ширина расположения режуще-скалывающих зубьев превышает толщину преодолеваемого льда, каждый режуще-скалывающий зуб выполнен из холодоустойчивой стали и представляет собой полку, выступающую за поверхность обшивки борта, скрепленную с обшивкой борта и с продольно-поперечным силовым набором, причем режуще-скалывающие зубья расположены наклоненными к ватерлинии рядами со сдвигом в ряду нижнего режуще-скалывающего зуба относительно верхнего, при этом угол полки режуще-скалывающего зуба к горизонтальной плоскости может быть от положительного до отрицательного, аэрокреновая система состоит из фермы, монтажной платформы, приводов и воздушных винтов, при этом ферма установлена вертикально, ось симметрии ее проходит через центр масс корпуса, а в основании она жестко скреплена с главной палубой и продольно-поперечным силовым набором, проходит через надстройку, при этом в ее вершине установлена горизонтально монтажная платформа, на которой размещены приводы, снабженные воздушными винтами, плоскость вращения которых совпадает или параллельна диаметральной плоскости корпуса, а система управления аэрокреновой системой включает в себя последовательно соединенные пульт, компьютер и коммутатор, который одновременно соединен с приводом и механизмом регулирования угла атаки воздушных винтов.
В описание введены новые термины и применены следующие условные обозначения.
Фрезер-пояс - часть борта ледокольного судна в районе ледового пояса, оснащенная режуще-скалывающими зубьями.
Аэрокреновая система - конструкция, принадлежащая корпусу судна и состоящая из вертикальной фермы, установленной преимущественно в центре масс ледокольного судна, жестко скрепленная внизу с корпусом, а вверху оснащенная воздушным движителем, вектор тяги которого действует в вертикальной поперечной плоскости судна, попеременно в противоположные стороны.
Н - вертикальная высота фермы аэрокреновой системы;
L ф. п. - длина фрезер-пояса;
T ф. п. - ширина фрезер-пояса (часть высоты борта);
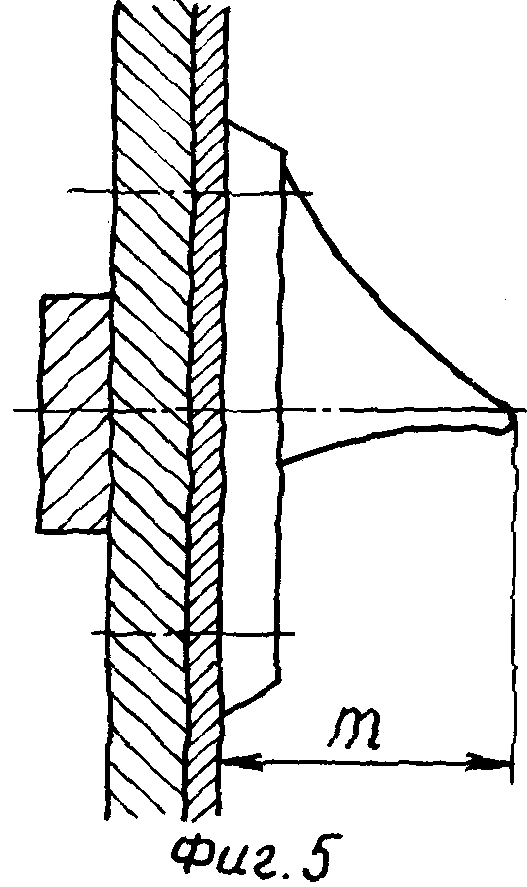
m - величина режуще-скалывающего зуба в горизонтальной плоскости к нормали борта;
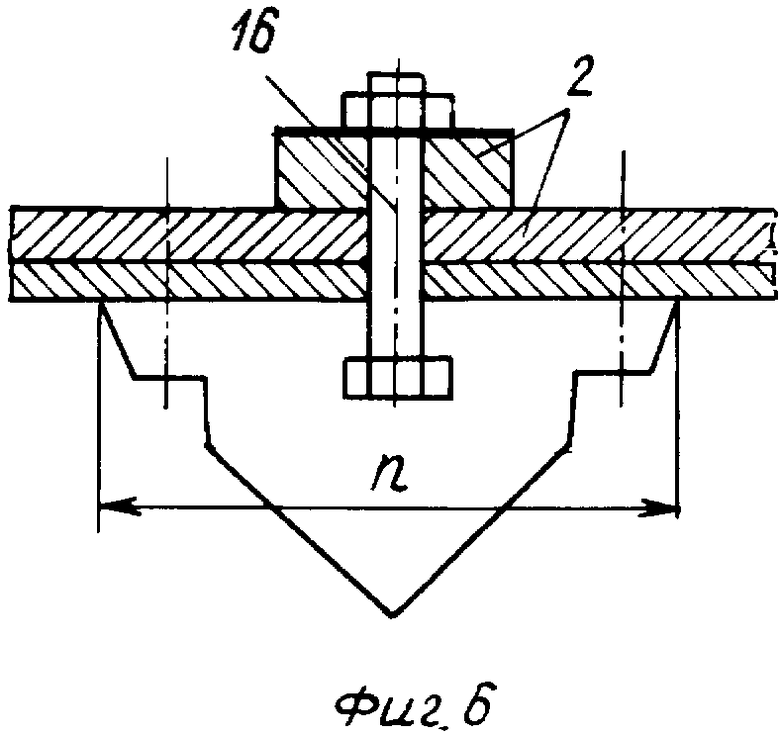
n - величина режуще-скалывающего зуба по длине борта;
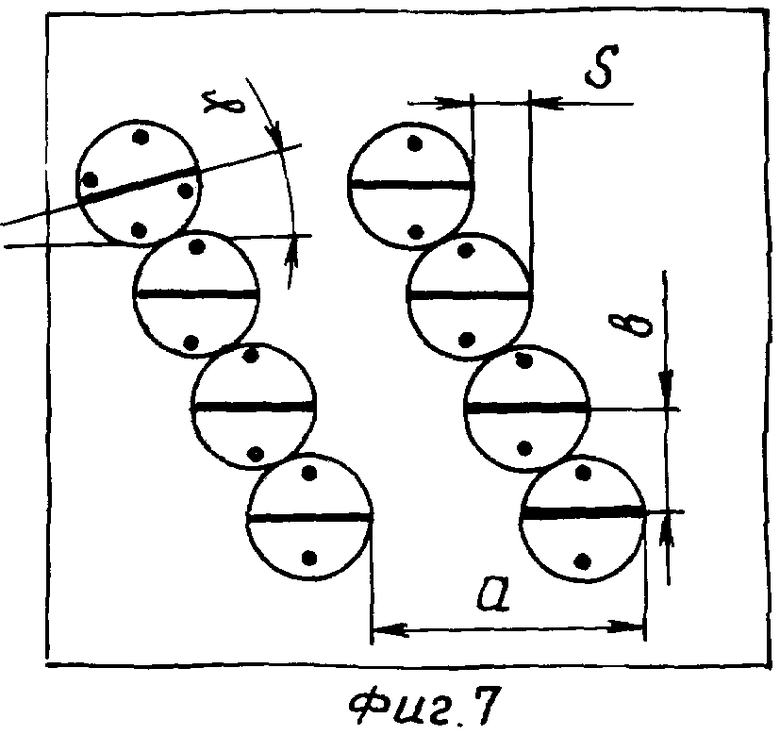
а - шаг (расстояние) по длине борта в горизонтальной плоскости между двумя соседними режуще-скалывающими зубьями;
b - раcстояние по вертикали между полками двух соседних режуще-скалывающих зубьев;
S - расстояние (сдвиг) нижнего режуще-скалывающего зуба относительно верхнего;
γ - угол между полкой режуще-скалывающего зуба и горизонтальной плоскостью;
z - количество режуще-скалывающих зубьев в ряду;
f - частота принудительных поперечных колебаний корпуса ледокола;
ϕ1- угол рабочего поперечного крена принудительных поперечных колебаний корпуса ледокола;
Р в. - сила тяги воздушных винтов;
Ма.с. момент сила аэрокреновой системы;
ЦМ - центр массы ледокольного судна;
ЦВ - центр величины судна.
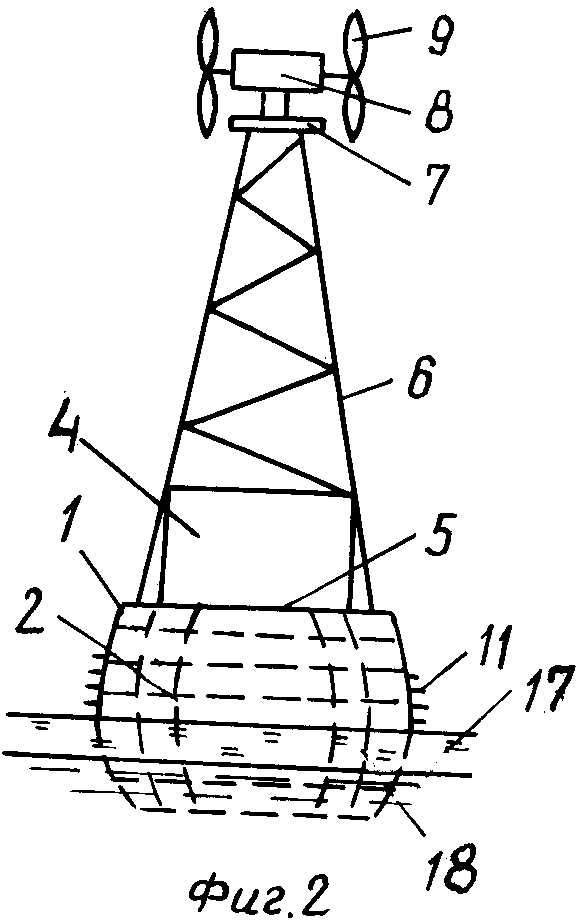
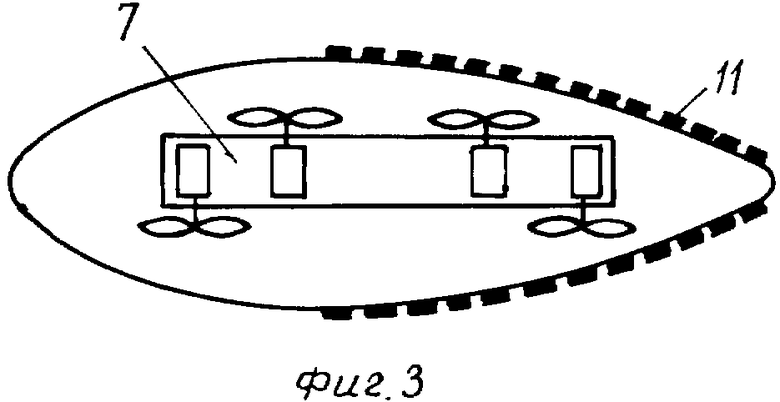
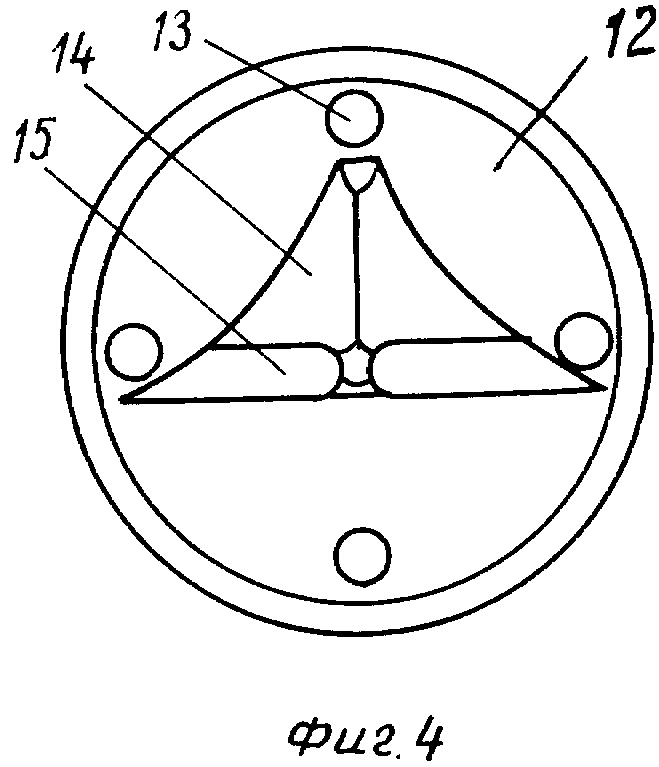
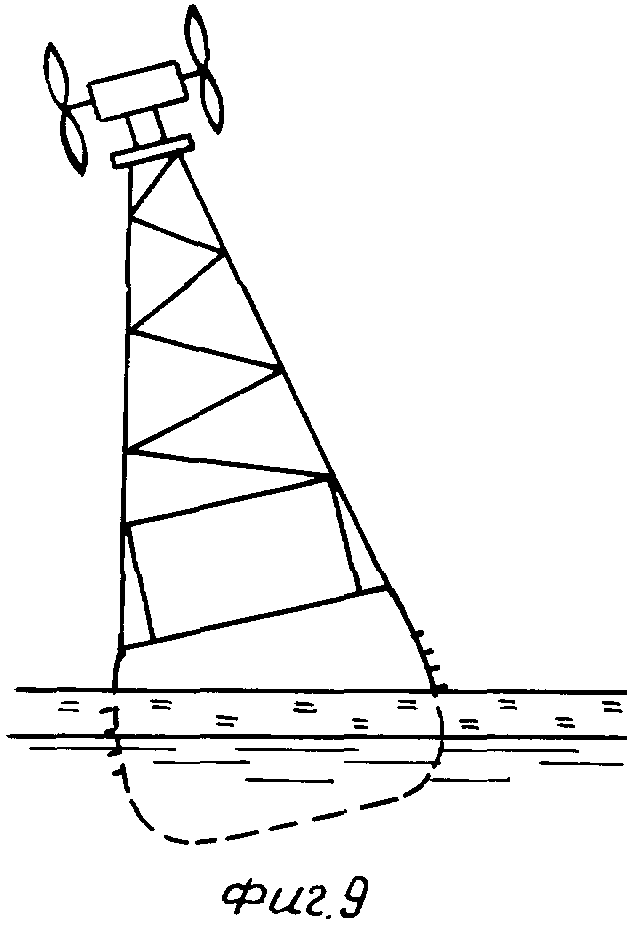
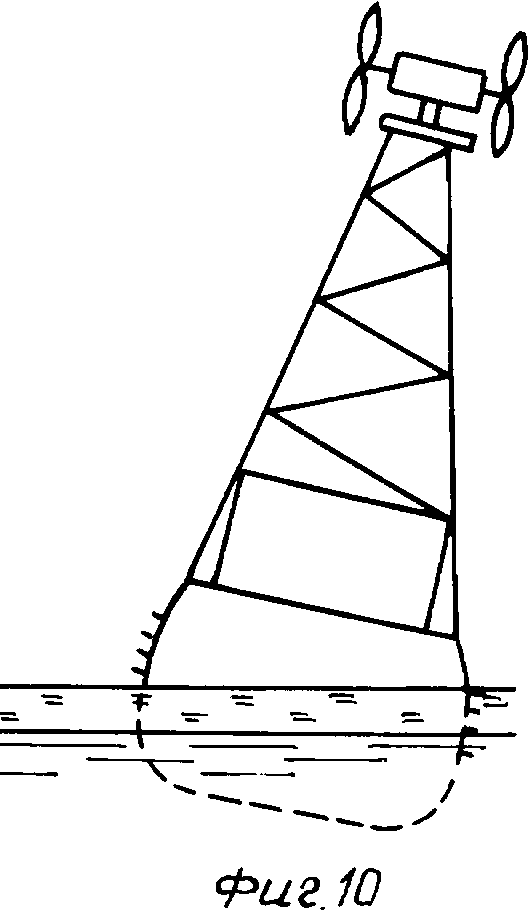
На приведенных чертежах изображено: фиг.1 - общий вид ледокольного судна для преодоления тяжелых ледяных полей, вид сбоку; на фиг.2 схематично показано то же судно, вид спереди; на фиг.3 показано то же судно, вид сверху; на фиг. 4 показана конструкция режуще-скалывающего зуба, вид прямо на борт; на фиг.3 схематично показан режуще-скалывающий зуб, вид сбоку с разрезом по вертикальной поперечной плоскости судна и его крепление к обшивке борта и продольно-поперечному силовому набору; на фиг.6 схематично показан режуще-скалывающий зуб и его крепление, вид сверху; на фиг.7 схематично показаны основные соотношения установки режуще-скалывающих зубьев на борту ледокольного судна; на фиг.8 показана функциональная электрическая схема работы аэрокреновой системы; на фиг. 9, 10 показана работа ледокольного судна для преодоления тяжелых ледяных полей.
Ледокольное судно для преодоления тяжелых ледяных полей содержит (см. фиг. 1, 2, 3) корпус 1, наиболее целесообразной форме корпуса удовлетворяют ледоколы канадского типа, имеющие мидель-шпангоут округлой формы, продольно-поперечный силовой набор 2, обшивку бортов 3, часть которой по длине L ф. п. от носовой оконечности 10 до кормы и по ширине Г ф.п. снабжена с обоих бортов фрезер-поясом, состоящим из режуще-скалывающих зубьев 11. Фрезер-пояс расположен в районе ватерлинии 18, ширина его Г ф.п. ориентировочно соответствует двойной толщине преодолеваемого льда 17, но может от нее отличаться. Каждый режуще-скалывающий зуб 11 (см. фиг.4, 5, 6) выполнен из прочной вязкой холодоустойчивой стали и представляет из себя отливку в виде фланца 12, снабженного ребрами жесткости 14, подкрепляющими горизонтальную полку 15, которая выступает за поверхность обшивки бортов 3 по горизонтальной плоскости на m и по длине борта на n. Геометрическая форма полки 15 режуще-скалывающего зуба 11 может быть различная, в данном случае она выбрана треугольной. Фланец 12 имеет крепежные отверстия 13, причем сопрягается с обшивкой борта 3 так, что его контактная поверхность подвергнута механической обработке с выполнением профиля обшивки борта 3 по кривизне, а крепежные отверстия 13 вместе с отверстиями в элементах продольно-поперечного силового набора 2 калиброваны под усиленные болты 16, что позволяет исключить люфт режуще-скалывающего зуба 11 и обеспечить герметичность соединения от проникновения забортной воды.
Режуще-скалывающие зубья 11 установлены по фрезер-поясе (см. фиг.7) в определенном порядке: рядами с шагом а, наклоненными к ватерлинии 18, с расстоянием по высоте борта между ними b, со сдвигом S в ряду нижнего относительно верхнего, с углом полки 15 к горизонтальной плоскости ±γ° и количеством в ряду z. В зависимости от конкретных условий эксплуатации и назначения ледокольного судна при его проектировании величины а, b, S, γ, m n, z, a также L ф.п. и Тф.п. могут меняться.
Аэрокреновая система выполнена из вертикальной фермы 6 высотой Н, установленной в районе центра масс корпуса 1 ледокольного судна, в основании она имеет прямоугольник, две стороны которого равны ширине корпуса 1, а другие две - не меньше, что позволит обеспечить ферме 6 наилучший момент сопротивления изгибу, ферма 6 своим основанием жестко скреплена с главной палубой 5, и продольно-поперечным силовым набором 2 корпуса 1 может проходить как внутри, так и снаружи надстройки 4. На верхней части фермы 6 горизонтально укреплена монтажная платформа 7 (см. фиг.3), на которой установлены приводы 6 воздушных винтов 9. Привод представляет из себя электродвигатель постоянного тока, соединенный посредством планетарного редуктора с четырехлопастным воздушным винтом 9 изменяемого шага, которых установлено четное количество, с возможностью синхронного изменения углов атаки лопастей воздушного винта 9. Плоскости вращения воздушных винтов 9 совпадают или параллельны вертикальной продольной диаметральной плоскости корпуса 1, а векторы тяги в паре воздушных винтов направлены в противоположные стороны.
Для обеспечения работы аэрокреновой системы и ее интеграции в управление ледокольным судном предназначена система управления (см. фиг.8), состоящая из судового источника энергии 19, пульта 20, компьютера 21 и коммутатора 22, который связан с приводом 8 и механизмом регулирования угла атаки воздушных винтов 9.
Ледокольное судно для преодоления тяжелых ледяных полей работает следующем образом.
При прокладке канала в сплошных ледяных полях, льдах большой толщины, оказывающих значительное сопротивление ледоколу и требующих больших энергозатрат, применяют новую технологию (способ) разрушения льда, новую конструкцию ледокола и новую тактику прокладки канала, которые заключаются в том, что ледокольному судну нового поколения, оснащенному аэрокреновой системой с фрезер-поясом режуще-скалывающих зубьев дают принудительные маятниковые динамичные колебания в поперечной плоскости судна с заданной угловой скоростью одновременно с поступательным движением вперед. При этом ледокольное судно внедряется в ледяное поле при срезании (скалывании) и выкрашивании кромки граничного льда бортами, прокладывая русло канала, и не подвергает непроизводительному продольному сжатию корпусом ледяное поле всей своей громадной кинетической энергией поступательного движения.
Устройство приводится в действие путем включения судового источника энергии 19 на пульте 20. В пульт 20 системы управления с помощью задатчиков судоводитель вводит группы исходных данных и параметры выходных величин. Группы исходных данных составляют переменные величины: характеристики льда - толщина, прочность, возраст, торосистость и др, метеорологические условия - сила и направление ветра, температура воздуха, выпадение осадков, характеристики ледокольного судна: скорость хода, весовое водоизмещение, осадка и другие группы. К параметрам выходных величин относятся: частота принудительных поперечных колебаний корпуса ледокола f и угол рабочего поперечного крена принудительных поперечных колебаний корпуса ледокола ϕ. На пульте 20 расположены органы управления, индикация прохождения команд, а также световая и звуковая сигнализации опасных и предельных режимов. Заданные пультом 20 параметры поступают в компьютер 21, в котором хранятся программы работы аэрокреновой системы, а также необходимая дополнительная информация: коэффициенты, константы, ограничительные величины параметров, индивидуальная информация по данному ледокольному судну: ширина корпуса 1, высота борта, форма корпуса и др., параметры аэрокреновой системы: L п.ф. Т ф.п., а, b, S, z, m, n, γ, Н, данные группы воздушных винтов 9: количество, диаметр, диапазон углов атаки лопастей, скорость вращения воздушных винтов и другие параметры. В итоге в компьютере 21 вычисляется закон управления аэрокреновой системы, который реализуется в текущем времени исполнительными командами, которые усиливаются и поступают в коммутатор 22 и затем на привод 8 воздушных винтов 9. Сила тяги Р в. воздушных винтов 9 определяется мощностью привода 8, скоростью их вращения, углом атаки лопастей и количеством одинаково направленных воздушных винтов 9. Сила тяги Р в. прикладывается к плечу Н фермы 6 и создает момент силы М а.с. аэрокреновой системы, М а.с. = Р в. • Н, который действует относительно ЦМ ледокольного судна и создает корпусу поперечный кренящий момент.
Корпус 1 вводится, допустим, в левый крен, при достижении величины угла крена, заданного на пульте 20, привод 8 работающих воздушных винтов 9 отключается, тормозится до остановки (при этом возможна рекуперация энергии) и включается другой винт или группа винтов 9, создающих противоположную тягу, и корпус 1 получает противоположное угловое движение вплоть до достижения корпусом противоположного правого крена заданной величины, тогда привод 8 воздушных винтов 9 правого крена отключается, тормозится, и включается группа воздушных винтов 9 левого крена. Таким образом, устанавливаются устойчивые принудительные маятниковые колебания в поперечной плоскости корпуса 1 с заданными параметрами.
При выполнении описанных эволюций ледокольного судна не используются креновые цистерны, их вообще в корпусе нет, нет также другой существенной массы на судне, перемещаемой в его поперечной плоскости, а корпус ледокола, как указывалось выше, применен канадского типа. Этим достигается, что ЦМ и ЦВ судна находятся на одной вертикали в диаметральной плоскости, поэтому посторонним кренящим моментам корпус судна не подвергается. При работе аэрокреновой системы принудительные поперечные колебания ледокола не изменяют его остойчивости и обеспечивается соответствующее качество судна.
Разрушение льда происходит следующим образом: ледокольное судно вводится, допустим, в левый крен. Работают режуще-скалывающие зубья 11 фрезер-пояса левого борта. Под действием реакции сопротивления кромки льда возникает суммарная, по борту, поперечная отталкивающая сила, которая будет прижимать ледокольное судно к правой кромке канала. Но в это время контакт со льдом 17 происходит по гладкой поверхности правого бурта, так как режуще-скалывающие зубья 11 фрезер-пояса правого борта находятся выше ледяного поля 17. Когда же судно перекладывается в правый крен, то режуще-скалывающие зубья 11 фрезер-пояса правого борта с ходу, имея большой запас кинетической энергии поперечного движения, ударят сверху вниз по кромке правой стороны канала, что создаст дополнительный разрушающий эффект, так как режуще-скалывающие зубья 11 будут работать всей своей выступающей полкой 15. Под действием реакции сопротивления льда правой кромки канала ледокольное судно, находящееся в правом крене, будет отталкиваться от правой кромки канала и прижиматься к левой кромке канала. Таким образом, ледокольное судно будет разрушать кромки граничного льда своими фрезер-бортами даже при нулевом поступательном движении, а при ходе вперед будет внедряться в ледяное поле, прокладывая в нем канал.
Аэрокреновая система с фрезер-бортами работает в автоматическом режиме, однако судоводитель в любой момент может вмешаться в ее работу, изменить параметры или управлять вручную с пульта 20 в пределах ограничительных величин.
Работа ледокольного судна предусматривает ряд эксплуатационных этапов.
1 этап. В некотором удалении от тяжелого льда, на свободной воде, в полынье, в среде льда, не оказывающего существенного противодействия поперечным кренам, судоводитель дает ледокольному судну малый ход вперед, включает аэрокреновую систему, устанавливает исходные данные и создает судну поперечные колебания (допустим малый крен ϕ=5-7o и малую угловую скорость, соответствующую малой частоте f принудительных поперечных колебаний корпуса ледокола).
2 этап. Судоводитель осторожно подводит ледокольное судно к кромке льда, упирается в него носовой оконечностью 3 и вгрызается бортами в ледяное поле. Лед оказывает сопротивляющее действие на раскачку ледокольного судна, т.е. происходит демпфирование поперечных вынужденных колебаний, тогда автоматика компьютера 21 увеличивает силу тяги воздушных винтов 9. Судоводитель "чувствует" как судно нагружается, вгрызаясь в лед. Однако полного разрушения льда не происходит, так как фрезер-пояс работает только своей частью (см. 1 этап ϕ, f) и не разрушает всю толщину льда.
3 этап. Судоводитель плавно увеличивает ϕ и f на пульте 20, при этом фрезер-пояс перекрывает всю толщину льда с запасом, одновременно увеличивает ход судна до установления оптимального или возможного в данных конкретных ледовых условиях. Это и есть эффективный рабочий режим прокладки канала бортами ледокольного судна в тяжелых сплошных льдах.
4 этап. Выход ледокольного судна на слабое ледовое сопротивление или на свободную воду. В этом случае судоводитель должен заранее соответственно изменить режим работы аэрокреновой системы или отключить ее. Это достигается изменением задающих параметров или введением стоп-команд на пульте 20. Если судоводитель, по какой-либо причине, допустит выход ледокольного судна на опасные режимы, то сработает автоматика аварийных режимов, и ледокольное судно будет приведено в безопасное состояние. Кроме того, как было сказано выше, остойчивость ледокола также обеспечит безопасность судну.
5 этап. Работа ледокольного судна методом "набегов", "наездов". При снятии со льда вывешенного неподвижного ледокольного судна судоводитель на пульте 20 включает режим "снятие", по которому аэрокреновая система работает по специальной программе. Корпус ледокола раскачивается малыми поперечными кренами и дается одновременно ход назад. Очевидно, что подвижное ледокольное судно тянуть назад более выгодно, чем совершенно неподвижное, особенно если корпус 1 заклинен, т.е. в режиме "снятие" требуется меньше времени и энергии для приведения ледокола в рабочее состояние.
Конструктивные особенности фрезер-пояса.
Фрезер-пояс с обоих бортов выполнен так, что по длине L ф.п., возможно вплоть до кормы, он перекрыт режуще-скалывающими зубьями 11 без разрыва. Ширина его Т ф.п. назначается от максимально возможной толщины льда, которую может преодолевать конкретно проектируемый ледокол, может быть равной или превышать толщину льда, располагаться симметрично или несимметрично толщине льда. Если фрезер-пояс будет выше ватерлинии или в ее районе, то для разрушения льда потребуются большие крены, но при работе в мелкобитом льду, без поперечных колебаний, сопротивление корпуса будет меньше. Однако для преодоления тяжелых льдов большой толщины ледокольному судну лучше иметь Т ф.п. большой величины, превышающей толщину льда, допустим, в 2,0-2,5 раза, большие величины f и ϕ, тогда динамическая нагрузка на каждый режуще-скалывающий зуб будет меньше, а разрушение льда будет интенсивнее и быстрее.
Работа ледокольного судна, оснащенного аэрокреновой системой с фрезер-поясом, по разрушению ледяного поля имеет следующие физико-технические особенности:
1. По мере движения ледокольного судна разрушение льда фрезер-поясом суммируется из частных местных разрушений, производимых каждым режуще-скалывающим зубом 11, которое носит характер непрерывного последовательного линейно-точечного скола, выкрашивания, срезания некоторого объема граничного льда. При взаимодействии с обломками ледяных полей и торосистыми образованиями начальное взаимодействие фрезер-пояса с ними носит характер многократной ударно-дробной деформации льда.
2. Сила поперечного момента корпуса ледокольного судна приложена на очень ограниченный участок ледяного поля на величину площади полки 15 режуще-скалывающего зуба 11, создается огромная концентрация напряжений на консоли кромки льда, которое во много раз превышает предел прочности льда на срез и изгиб, в результате лед разрушается (скалывается, выкрашивается, спиливается).
3. Сила, развиваемая каждым режуще-скалывающим зубом 11, приложена к кромке льда вертикально, практически не раскладывается на составляющие и целиком совершает полезную работу на разрушение льда.
4. Время действия вертикальной ударной нагрузки на кромку льда режуще-скалывающим зубом 11 очень маленькое, поэтому деформация не успевает распространиться, рассосредоточиться, преобразоваться в поликристаллической толще льда и локализуется в месте приложения.
5. Попеременное отталкивание корпуса 1 ледокольного судна от правой и левой кромок канала, в результате взаимодействия фрезер-пояса со льдом, создает условия возникновения промежутка (щели) между корпусом 1 и ледяным полем, что имеет благоприятные последствия для вытеснения подледной воды при деформации изгиба и ослабления ледяного поля от вывешивания носовой оконечности ледокола на лед и действия вертикальными усилиями.
Эффективность предложенного технического решения в том, что предложена новая прогрессивная технология разрушения тяжелых ледяных полей и разработана конструкция ледокольного судна для ее осуществления.
Удалось "уйти" от применяемого традиционного метода ледопроходимости в тяжелых ледяных полях посредством разрушения льда гладким корпусом, т.е. бортами, преодолевая сопротивление продольного сжатия льда, затрачивая огромную работу по этой непроизводительной технологии. Исключено, в значительной мере, внешнее трение корпуса ледокола, противодействующее соприкасающимся телам.
Разрушение льда достигается поперечным вертикальным конгруэнтным граничным скалыванием, выкрашиванием льда по контуру судна. Ледоразрушающим фактором здесь является не кинетическая энергия поступательного движения ледокольного судна, т.е. не продольный таранный напор под действием всей его массы и мощи, а поперечный вертикальный колебательный разрушительный момент фрезер-пояса и аэрокреновой системы ледокольного судна. Иначе, мощность главной силовой установки ледокольного судна и его водоизмещение не являются решающими факторами ледопроходимости в тяжелых льдах и появляется возможность их уменьшения с вытекающими последствиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕДОКОЛЬНОЕ СУДНО С ДВИЖИТЕЛЕМ ХОДА НАЗАД ПРИ РАБОТЕ НАЕЗДАМИ В ТЯЖЕЛЫХ ЛЬДАХ | 2000 |
|
RU2171202C1 |
| ЛЕДОКОЛ С ЭФФЕКТИВНЫМ ИСПОЛЬЗОВАНИЕМ ВЕРТИКАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ЕГО МАССЫ | 2000 |
|
RU2172273C1 |
| СУДНО ЛЕДОВОГО ПЛАВАНИЯ И.Н.КОЧЕРГИНА | 1992 |
|
RU2041122C1 |
| АРКТИЧЕСКОЕ ЛЕДОКОЛЬНОЕ ТРАНСПОРТНОЕ КРУПНОТОННАЖНОЕ СУДНО С ЛЕДОСТОЙКИМ ПИЛОНОМ | 2008 |
|
RU2389640C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2456201C1 |
| Носовая оконечность ледокола | 1978 |
|
SU944986A1 |
| Ледокольное судно | 1988 |
|
SU1762746A3 |
| ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ РАБОТЫ ПРЕИМУЩЕСТВЕННО В МЕЛКОВОДНЫХ ЗАМЕРЗАЮЩИХ АКВАТОРИЯХ | 2013 |
|
RU2549739C1 |
| Ледокол | 1983 |
|
SU1143645A1 |
| Самоходное ледокольно-ледоуборочное судно ВАДПИ-4 | 1981 |
|
SU1008079A1 |

Изобретение относится к судостроению, в частности к конструкции и эксплуатации ледокольных судов. Ледокольное судно содержит корпус, надстройку, режуще-скалывающие зубья, аэрокреновую систему и систему управления ею. Режуще-скалывающие зубья установлены по обоим бортам от носовой оконечности до кормы в районе ватерлинии. Аэрокреновая система состоит из фермы, монтажной платформы, приводов и воздушных винтов. Ферма установлена вертикально, ось симметрии ее проходит через центр масс корпуса, а в основании она жестко скреплена с главной палубой и продольно-поперечным силовым набором. В вершине фермы установлена горизонтально монтажная платформа, на которой размещены приводы, снабженные воздушными винтами, плоскость вращения которых совпадает или параллельна диаметральной плоскости судна. Система управления аэрокреновой системой включает в себя последовательно соединенные пульт, компьютер и коммутатор, который соединен с приводом и механизмом регулирования угла атаки воздушных винтов. Достигается повышение ледопроходимости ледокольного судна в тяжелых ледяных полях с одновременным сокращением его энерговооруженности. 10 ил.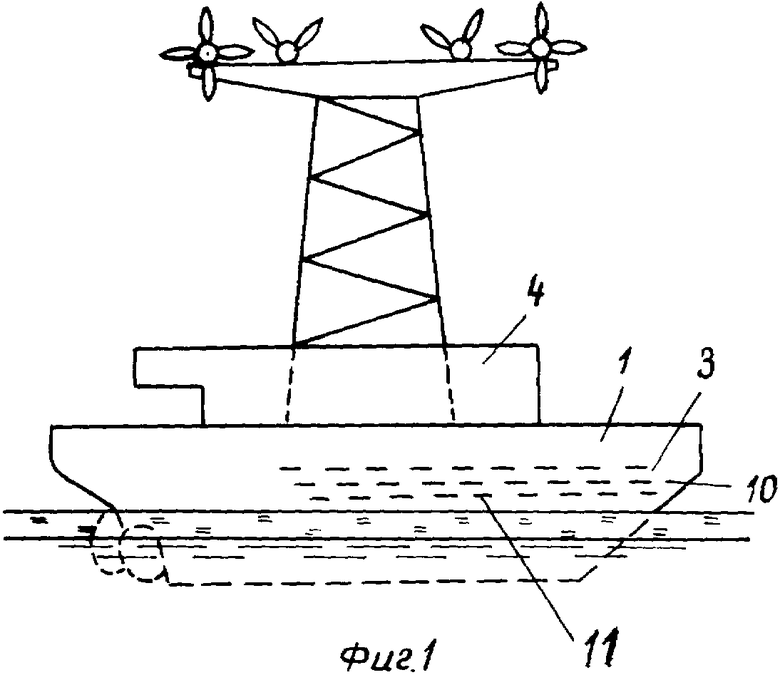
Ледокольное судно для преодоления тяжелых ледяных полей, содержащее корпус с продольно-поперечным силовым набором, обшивкой бортов и главной палубой, надстройку, режуще-скалывающие зубья и источник энергии, отличающееся тем, что в ледокольное судно дополнительно введены аэрокреновая система и система управления ею, при этом режуще-скалывающие зубья установлены по обоим бортам от носовой оконечности до кормы в районе ватерлинии, причем ширина расположения режуще-скалывающих зубьев превышает толщину преодолеваемого льда, каждый режуще-скалывающий зуб выполнен из холодоустойчивой стали и представляет собой полку, выступающую за поверхность обшивки борта, скрепленную с обшивкой борта и с продольно-поперечным силовым набором, при этом режуще-скалывающие зубья расположены наклоненными к ватерлинии рядами со сдвигом в ряду нижнего режуще-скалывающего зуба относительно верхнего, причем угол полки режуще-скалывающего зуба к горизонтальной плоскости может быть от положительного до отрицательного, а аэрокреновая система состоит из фермы, монтажной платформы, приводов и воздушных винтов, при этом ферма установлена вертикально, ось симметрии ее проходит через центр масс корпуса, а в основании она жестко скреплена с главной палубой и продольно-поперечным силовым набором, проходит через надстройку, причем в ее вершине установлена горизонтально монтажная платформа, на которой размещены приводы, снабженные воздушными винтами, плоскость вращения которых совпадает или параллельна диаметральной плоскости корпуса, а система управления аэрокреновой системой включает в себя последовательно соединенные пульт, компьютер и коммутатор, который одновременно соединен с приводом и механизмом регулирования угла атаки воздушных винтов.
| ФОРШТЕВЕНЬ ДЛЯ ЛЕДОКОЛОВ | 0 |
|
SU362733A1 |
| Речное транспортное судно для плавания в битом и сплошном льду | 1981 |
|
SU965883A1 |
| US 4326476 А, 27.04.1982 | |||
| ОПТОЭЛЕКТРОННЫЙ КОММУТАТОР | 1990 |
|
RU2028675C1 |
