Изобретение относится к области машиностроительной гидравлики, в частности к аксиально-поршневым насосам переменной производительности.
Изменение производительности аксиально-поршневых насосов осуществляется за счет изменения амплитуды перемещения качающихся поршней, что достигается изменением угла наклона регулирующего органа. Для обеспечения позиционирования регулирующего органа относительно входного сигнала применяются механические и электрические обратные связи по положению (углу наклона) регулирующего органа.
Известен аксиально-поршневой насос, имеющий два цилиндра управления регулирующим органом с нуль-установительными пружинами и дросселирующий распределитель, выполненный в виде двух плоских золотников, причем один из золотников гидравлически соединен с рабочими полостями цилиндров управления и механически связан с регулирующим органом, а другой гидравлически соединен с источником управляющего давления и сливом и механически через шарнирно-рычажную связь с валиком механического входа [1].
Известен также насос переменной производительности аксиально-поршневого типа с электрогидравлическим управлением, система управления которого содержит регулирующий орган, корпус цилиндра с поршнем управления, электрогидравлический преобразователь, датчик положения рабочего органа и блок управления [2].
Рассмотренные устройства предполагают один вид управляющего воздействия - механический или электрический. При решении ряда задач требуется система управления, позволяющая сочетать оба вида управления. Например, насос переменной производительности на мобильной машине может быть использован в движении для управления поворотом по механическому каналу управления (от штурвала) и на стоянке в составе гидросистемы для управления технологическим оборудованием по электрическому каналу управления (от пульта управления).
Наиболее близким к заявляемому изобретению является аксиально-поршневой насос с регулирующим органом, управляемый от механического и электрического входов и содержащий систему управления, включающую источник управляющего давления, золотниковый распределитель механического входа управления, двухкаскадный злектрогидравлический усилитель (ЭГУ), являющийся вторым входом, два цилиндра управления с поршнями, нуль-установительными пружинами и двумя рабочими полостями и две золотниковые коробки, одна из которых предназначена для исключения одновременного воздействия двух управляющих сигналов от регулирующего органа, а вторая обеспечивает соединение выходных гидролиний электрогидравлического усилителя со сливом при управлении от механического входа. Оба входа управления имеют обратную связь от регулирующего органа насоса [3].
Недостатком описанного выше насоса является то, что в системе управления использован дорогостоящий двухкаскадный электрогидравлический усилитель типа "сопла-заслонки", а для реализации переключения входов управления необходимо введение двух золотниковых коробок: одной для переключения входов управления, а второй - для обеспечения быстродействия при переключении - из-за конструктивной схемы золотникового распределителя ЭГУ, не обеспечивающей в нейтральном положении слив рабочей жидкости из рабочих полостей цилиндров управления.
Кроме того, введение двух золотниковых коробок создает трудности при компоновке устройства управления насосом на объекте.
Технической задачей заявляемого изобретения является существенное уменьшение габаритов насоса и упрощение его конструкции.
Технический результат при использовании изобретения заключается в снижении себестоимости насоса и более удобной его компоновке в составе объекта.
Технический результат достигается тем, что в аксиально-поршневом регулируемом насосе, содержащем корпус, приводной вал, блок цилиндров с поршнями, предохранительные и редукционные клапаны, регулирующий орган с датчиком положения на его оси, систему управления насоса, включающую источник управляющего давления, два цилиндра управления с поршнями и нуль-установительными пружинами, каждый из которых имеет две рабочие полости, пятилинейный трехпозиционный распределитель механического входа, имеющий обратную связь от регулирующего органа и шарнирно-рычажную связь механического входа управления с нуль-установителем, причем первая и вторая линии управления распределителя механического входа соединены с первыми рабочими полостями цилиндров управления, третья и пятая линии управления соединены со сливом, первые рабочие полости цилиндров управления через распределитель сообщены со сливом, блок управления насосом с двумя входами и выходом, причем первый вход соединен с управляющим сигналом, а второй вход блока управления подсоединен к выходу датчика положения регулирующего органа согласно изобретению в систему управления насосом введены пятилинейный четырехпозиционный электрогидравлический распределитель с датчиком положения золотника, блок управления, снабженный третьим дополнительным входом, и нелинейный преобразователь, причем выход датчика положения золотника через нелинейный преобразователь подключен к третьему дополнительному входу блока управления, а выход блока управления соединен с входом электрогидравлического распределителя, первая и вторая линии управления электрогидравлического распределителя соединены со вторыми рабочими полостями цилиндров управления, третья линия управления его соединена с источником управляющего давления, четвертая линия управления соединена со сливом, а пятая линия управления соединена с четвертой линией управления распределителя механического входа и через электрогидравлический распределитель сообщается с источником управляющего давления, а вторые входы цилиндров управления сообщаются со сливом.
Таким образом, введение в систему управления насосом электрогидравлического распределителя (ЭГР) с нелинейной обратной связью по положению золотника ЭГР позволяет реализовать компактную конструкцию насоса, обеспечивающую выполнение требований к управлению регулируемым насосом и ее удобную компоновку. Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявляемого изобретения позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам заявляемого изобретения, следовательно, заявляемое изобретение соответствует критерию "новизна". Сравнение заявляемого устройства с другими техническими решениями показывает, что системы управления насосом с электрогидравлическим распределителем [2] широко известны, также как и нелинейный преобразователь [4]. Однако не обнаружено примение указанных признаков в данной взаимосвязи с другими признаками для достижения указанного технического результата, следовательно, заявляемое устройство соответствует критерию "изобретательский уровень".
На фиг.1 - изображена схема насоса с предлагаемым механическим и электрическим управлением.
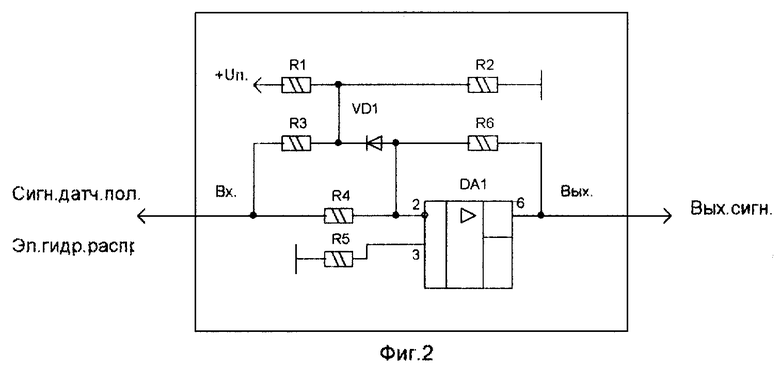
На фиг.2 - приведен пример реализации нелинейного преобразователя.
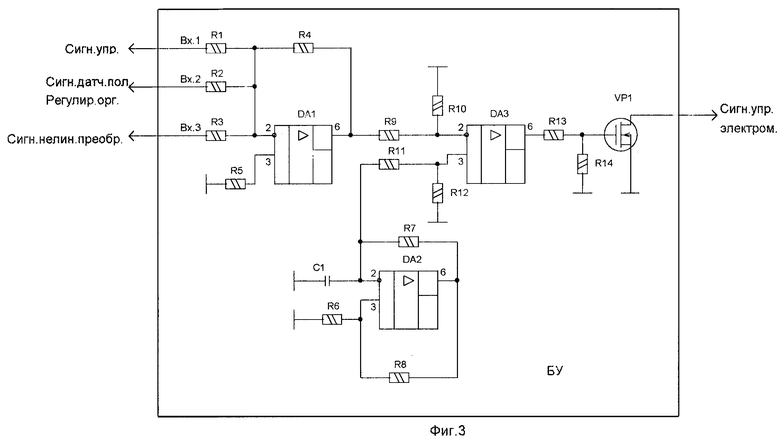
На фиг.3 - приведен пример реализации блока управления.
Насос (фиг.1) содержит корпус, приводной вал, блок цилиндров (не показаны), предохранительные 1 и редукционные клапаны 2, регулирующий орган 3 с датчиком положения 4, размещенным на его оси, систему управления насосом, включающую источник управляющего давления 5, распределитель механического входа 6, электрогидравлический распределитель (ЭГР) 7 с электромагнитом 8 и датчиком положения золотника 9 ЭГР, цилиндры управления 10 с поршнями 11 и нуль-установительными пружинами 12 и имеющие по две рабочие полости 13 и 14, блок управления 15, имеющий три входа и один выход, и нелинейный преобразователь 16, золотник 17 распределителя 6, кинематически связанный с рычагом 18 механического входа управления, который нуль-установительными пружинами 19 и 20 удерживается в нейтральном положении, а золотник 21 распределителя 6 через механическую связь соединен с регулирующим органом 3 насоса, который нуль-установительными пружинами 12 цилиндров управления 10 через поршни 11 также удерживается в нейтральном положении. Источник управляющего давления 5 через электрогидравлический распределитель 7 соединен с четвертой (напорной) линией распределителя механического входа 6. Рабочие полости 13 цилиндров управления соединены со сливом через распределитель 6, а рабочие полости 14 - через электрогидравлический распределитель 7. Выход датчика положения 4 регулирующего органа соединен с первым входом блока управления, а второй вход блока управления соединен с управляющим сигналом, выход датчика положения золотника 9 электрогидравлического распределителя 7 через нелинейный преобразователь 16 соединен с третьим входом блока управления, а выход блока управления соединен с управляющим входом (электромагнитом 8) электрогидравлического распределителя 7.
На фиг.2 приведен пример реализации нелинейного преобразователя.
Нелинейный преобразователь состоит из усилителя с переменным коэффициентом передачи, выполненного на операционном усилителе DA 1, резисторах R1.... R6 и диоде VD1, делителя, выполненного на резисторах R1 и R2, который определяет напряжение открытия диода VD1, определяемого соотношением Uоткр=Uпит x R2 /R1+R2. Сигнал на вход нелинейного преобразователя поступает с датчика положения золотника ЭГР. При величине входного сигнала Uвх <Uоткр VD1 выходное напряжение преобразователя будет равно U вых = Uвх x R6 /R4, если Uвх>Uоткр VD1, то Uвыx = Uвх x R6(R3+R4)/R3R4. Очевидно, что коэффициент передачи нелинейного преобразователя увеличивается при входных напряжениях, больших напряжения открытия диода VD1, при этом соотношением резисторов R1 и R2 можно устанавливать величину напряжения открытия диода VD1, а соотношением резисторов R3 и R4 - изменение коэффициента передачи. Таким образом, при перемещении золотника ЭГР к краю рабочей зоны изменяется коэффициент передачи сигнала датчика положения золотника ЭГР, а следовательно, и глубина обратной связи по положению, что обеспечивает удержание золотника ЭГР в рабочей зоне.
На фиг.3 приведен пример реализации блока управления.
Блок управления состоит из суммирующего усилителя, выполненного на операционном усилителе DA1 и элементах R1-R5, широтно-импульсного усилителя, выполненного на операционных усилителях DA2, DA3 и резисторах R6 - R14, конденсаторе С1 и ключе VP1.
Блок управления работает следующим образом.
При включении питания на выходе широтно-импульсного усилителя формируются импульсы со скважностью, при которых ток, проходящий через обмотку электромагнита, удерживает золотник ЭГР в нейтральном положении. Когда на 1 вход блока управления поступает управляющий сигнал напряжение на выходе суммирующего усилителя изменяется и воздействует на управляющий вход широтно-импульсного усилителя, при этом изменяется скважность импульсов на выходе широтно-импульсного усилителя, а соответственно и ток, протекающий через электромагнит, что приводит к перемещению золотника ЭГР и формированию в системе управления сигналов обратных связей по положению золотника и по положению peгулирующего органа, которые поступают на второй и третий входы блока управления и уравновешивают управляющие сигналы, выходное напряжение суммирующего усилителя принимает исходное значение, а следовательно и ток через обмотку электромагнита, при этом золотник ЭГР возвращается в нейтральное положение.
Насос работает следующим образом.
При работе основного насоса начинает работать источник управляющего давления 5. Рабочая жидкость от источника управляющего давления 5 поступает на редукционные клапаны 2 и через электрогидравлический распределитель 7 на распределитель механического входа 6.
При ручном управлении насосом рычагом 18 через механическую связь перемещается золотник 17 распределителя 6. Поток рабочей жидкости от источника управляющего давления 5 через золотники 17 и 21 подводится к рабочей полости 13 одного из цилиндров управления, а рабочая полость 13 второго цилиндра сообщается со сливом. Создающийся перепад давления в рабочих полостях 13 цилиндров управления перемещает регулирующий орган 3 и насос изменяет подачу рабочей жидкости. Вместе с регулирующим органом 3 перемещается золотник 21 распределителя 6 до полного отключения подводящей линии от рабочей полости 13 одного из цилиндров управления. Это приводит к прекращению подачи в него рабочей жидкости и регулирующий орган 3 насоса останавливается. Таким образом, величина перемещения регулирующего органа, а соответственно и подача насоса находятся в соответствии с величиной изменения положения рычага 18.
При управлении насосом от электрического входа включают электропитание (на фиг.1 не показано) блока управления насосом 15, при этом блок управления формирует электрический ток, поступающий на электромагнит 8, и обеспечивается перемещение золотника электрогидравлического распределителя 7 из исходного положения в нейтральное, при котором четвертая (напорная) линия управления распределителя механического входа 6 отсоединяется от источника управляющего давления 5, а рабочие полости 14 цилиндров управления 10 отсоединяются от слива. При нейтральном положении золотника электрогидравлического распределителя 7 в рабочих полостях 14 цилиндров управления обеспечивается равенство давлений и регулирующий орган 3 неподвижен. Подача управляющего сигнала на первый вход блока управления приводит к изменению величины управляющего тока через электромагнит 8 и перемещению золотника электрогидравлического распределителя 7. Нелинейная обратная связь по положению золотника (датчик положения 9, нелинейный преобразователь 16, третий вход блока управления 15) обеспечивает его позиционирование в рабочей зоне и предотвращает соединение первой и второй линии управления электрогидравлического распределителя со сливом, а третьей линии управления - с четвертой линией управления распределителя 6. При перемещении золотника ЭГР 7 рабочая жидкость от источника управляющего давления 5 поступает в рабочую полость 14 одного из цилиндров управления 10, а полость 14 второго цилиндра управления 10 и полости 13 сообщается со сливом, что приводит к перемещению поршней 11 и изменению угла наклона регулирующего органа 3. Перемещение регулирующего органа 3 происходит до возвращения золотника ЭГР 7 в нейтральное положение за счет обратной связи (датчик положения 4, первый вход блока управления 15). При этом подача рабочей жидкости насосом будет пропорциональна величине управляющего сигнала.
Результаты испытания заявляемой конструкции насоса с усовершенствованной системой управления показали высокую надежность конструкции, хорошую управляемость и динамичность.
Источники информации
1. А.с. 1070332, F 04 В 13/26 - 1984 г.
2. Патент РФ 2155275, F 04 В 1/30 - 1999 г.
3. Патент РФ 2109167, F 04 В 1/26 - 1995 г.
4. "Электроника", В.Г. Гусев, Ю.М. Гусев. М.: Высшая школа, 1991 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС ПЕРЕМЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ | 2010 |
|
RU2436994C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| НАСОС ПЕРЕМЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ | 1999 |
|
RU2155275C1 |
| ГРУППОВОЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ (ВАРИАНТЫ) | 2001 |
|
RU2196250C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2001 |
|
RU2207489C2 |
| ГИДРОПРИВОД ВЕНТИЛЯТОРОВ СИСТЕМЫ ОХЛАЖДЕНИЯ | 2000 |
|
RU2184250C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА КАЧАНИЯ КРИСТАЛЛИЗАТОРА | 2001 |
|
RU2201842C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2151329C1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
Изобретение относится к области машиностроительной гидравлики, а именно к аксиально-поршневым насосам переменной производительности. Насос содержит корпус, приводной вал, блок цилиндров с поршнями, предохранительные и редукционные клапаны, регулирующий орган с датчиком положения на его оси, систему управления насоса, включающую источник управляющего давления, два цилиндра управления с поршнями и нуль-установительными пружинами, каждый из которых имеет две рабочие полости, пятилинейный трехпозиционный распределитель механического входа, имеющий обратную связь от регулирующего органа и шарнирно-рычажную связь механического входа управления с нуль-установителем. Первая и вторая линии управления распределителя механического входа соединены с первыми рабочими полостями цилиндров управления, третья и пятая линии управления соединены со сливом. Первые рабочие полости цилиндров управления через распределитель сообщены со сливом, блок управления насосом - с двумя входами и выходом. Первый вход соединен с управляющим сигналом, а второй вход блока управления подсоединен к выходу датчика положения регулирующего органа. В систему управления насосом введены пятилинейный четырехпозиционный электрогидравлический распределитель с датчиком положения золотника, блок управления, снабженный третьим дополнительным входом, и нелинейный преобразователь. Выход датчика положения золотника через нелинейный преобразователь подключен к третьему дополнительному входу блока управления. Выход блока управления соединен с входом электрогидравлического распределителя. Первая и вторая линии управления электрогидравлического распределителя соединены со вторыми рабочими полостями цилиндров управления. Третья линия управления его соединена с источником управляющего давления. Четвертая линия управления соединена со сливом. Пятая линия управления соединена с четвертой линией управления распределителя механического входа и через электрогидравлический распределитель сообщена с источником управляющего давления. Вторые входы цилиндров управления сообщаются со сливом. Существенно уменьшаются габариты насоса и упрощается его конструкция. 1 з.п. ф-лы, 3 ил.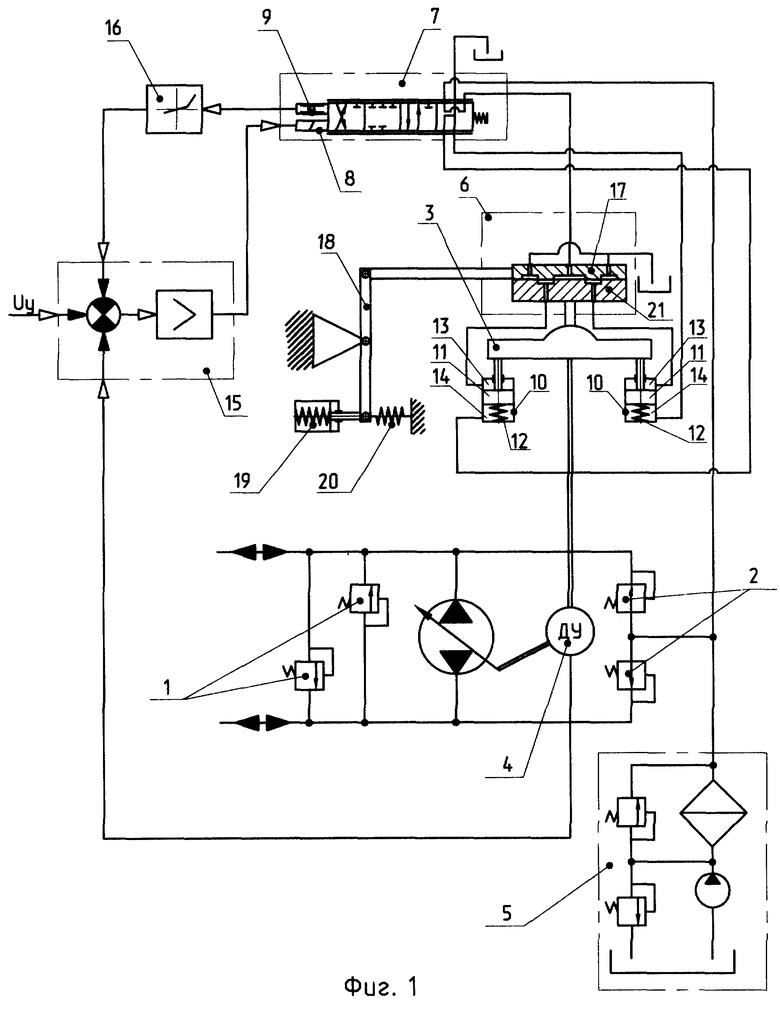
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 1995 |
|
RU2109167C1 |
| НАСОС ПЕРЕМЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ | 1999 |
|
RU2155275C1 |
| Механизм управления регулируемым аксиально-поршневым насосом | 1982 |
|
SU1070332A1 |
| Механизм управления насосом | 1990 |
|
SU1820027A1 |
| Механизм управления насоса | 1990 |
|
SU1758282A1 |
| Аксиально-поршневой регулируемый насос | 1988 |
|
SU1571286A1 |
| Механизм управления регулируемым аксиально-поршневым насосом | 1972 |
|
SU439624A1 |
| US 5975858 A, 02.11.1999 | |||
| US 5907951 A, 01.06.1999 | |||
| US 5320499 A, 14.06.1994. | |||

