Область техники, к которой относится изобретение
Настоящее изобретение относится к механизму регулирования зигзагообразного стежка для выборочного регулирования циклического поперечного перемещения нити согласно ограничительной части п.1 формулы изобретения.
Уровень техники
Известно множество различных конструкций механизмов регулирования зигзагообразного стежка, используемых прежде всего в зевообразовательных механизмах для выборочного регулирования циклического поперечного перемещения нити.
В механизмах регулирования зигзагообразного стежка первого типа регулирование перемещения нитей происходит косвенным путем, при этом нить перемещается только тогда, когда она отобрана. Для этой цели нити фиксировано продеты в направляющие их глазки галев, при этом галева перемещаются в соответствии с заданной программой посредством соединительных приспособлений расположенными перед ними жаккардовыми машинами, ремизоподъемными каретками и преступными зевообразовательными механизмами. Очевидно, что при такой системе для выборочного перемещения нити механизм должен иметь большое количество деталей с большой величиной их хода, что неизбежно приводит к возникновению множества проблем. Так, в частности, высокие силы инерции движущихся деталей существенно ограничивают скорость работы зевообразовательного механизма. Другими характерными недостатками известных механизмов регулирования зигзагообразного стежка являются, например, высокий износ, сильная вибрация, высокий уровень шума, большие габариты, обусловленные наличием сложных механизмов, плохие эргономические показатели и т.п. И, наконец, из-за их сложной конструкции такие механизмы являются помимо прочего относительно дорогими.
Второй тип подобных механизмов регулирования зигзагообразного стежка известен из заявки WO 97/11215. Этот механизм имеет приводимое в циклическое движение подъемное устройство по меньшей мере с одним захватчиком нити, а также по меньшей мере одно приводимое в действие приводным устройством регулирующее приспособление для выборочного захвата нити захватчиком подъемного устройства. Такие регулирующие приспособления, которые в данном случае функционально напрямую связаны с захватчиком нити, расположены на подъемном устройстве и совершают вместе с ним вертикальное возвратно-поступательное движение. Эта конструкция обладает рядом различных недостатков. Поскольку в состав подъемного устройства помимо захватчика основной нити должны также входить, в частности, регулирующее приспособление и приводное устройство, его габариты являются сравнительно большими. Для ткацкого станка с высокой плотностью по основе такой механизм регулирования зигзагообразного стежка практически непригоден. Кроме того, подвижные детали обладают сравнительно большой массой и помимо этого их приходится перемещать по всей длине хода подъемного устройства. Далее, перемещение вместе с подъемным устройством еще и приводного устройства требует наличия подвижного интерфейса для подсоединения электрокабелей и кабелей передачи программных данных, а такие интерфейсы имеют сравнительно сложную конструкцию, являются дорогими и подвержены быстрому износу. Кроме того, заправку нити приходится производить очень аккуратно во избежание деформации деталей и, как следствие, вывода механизма из строя с соответствующими затратами на его ремонт. Поэтому заправка нити несмотря на удобный доступ к механизму требует много времени и затрат. И, наконец, из-за сравнительно больших сил инерции движущихся деталей и чувствительности к различным воздействиям встроенной в подвижные детали электроники подобный механизм регулирования зигзагообразного стежка может работать лишь со сравнительно невысокой скоростью.
Описание изобретения
В основу настоящего изобретения была положена задача усовершенствовать механизм регулирования зигзагообразного стежка указанного в начале описания типа.
Эта задача решается согласно изобретению с помощью отличительных признаков п.1 формулы изобретения.
Благодаря тому, что регулирующие приспособления расположены независимо от захватчика нити, а тем самым и от подъемного устройства, масса самого подъемного устройства уменьшена, и оно не связано напрямую с чувствительными регулирующими элементами, и поэтому его конструкция может быть оптимальным образом согласована с предусмотренной для него функцией по приведению элементов механизма регулирования зигзагообразного стежка в возвратно-поступательное движение. Регулирующие же приспособления являются практически неподвижными, т. е. они не должны совершать вместе с подъемным устройством возвратно-поступательное движение, а вместо этого их функция может быть ограничена и сконцентрирована исключительно на выполнении требуемого сдвига для циклической подачи нити с целью ее захвата и отпускания захватчиком. Неподвижное расположение регулирующих приспособлений позволяет помимо этого не только существенно упростить схему подачи на их приводы электроэнергии и управляющих сигналов и исключить ее износ, но и сделать управление и регулирование более гибким. В результате достигаются и другие решающие преимущества, а именно, с одной стороны, возможность использовать малогабаритные приводные двигатели для подъемного устройства, а с другой стороны, уменьшить размеры приводных устройств для регулирующих приспособлений, снизить потребление энергии приводными механизмами и, как следствие, сделать более экономичным не только изготовление, но и эксплуатацию при более высокой производительности. В результате при работе такого механизма выделяется меньшее количество тепла, что в конечном итоге упрощает и удешевляет кондиционирование производственных помещений, в которых установлены подобные механизмы. Кроме того, доступ к этому механизму более удобен, что упрощает заправку нити. Этому дополнительно способствует также неподверженность его деталей различным воздействиям.
Применение нового механизма регулирования зигзагообразного стежка в зевообразовательном механизме для регулирования перемещения основных нитей в ткацком станке обеспечивает достижение значительных вышеуказанных преимуществ.
Существенно меньшее количество деталей, в том числе и движущихся, и, как следствие, сокращение подвижных масс позволяет повысить скорость работы привода, а тем самым и увеличить производительность при одновременном существенном уменьшении износа, уровня шума и вибраций по сравнению с обычными механизмами регулирования зигзагообразного стежка, в частности зевообразовательными механизмами ткацкого станка. Предлагаемое в изобретении решение позволяет значительно повысить скорость работы механизма регулирования зигзагообразного стежка, прежде всего зевообразовательного механизма, а тем самым и соответствующего ткацкого станка, например до 5000 оборотов в минуту и более.
Отсутствие обычно используемых, расположенных в технологической цепи перед механизмом регулирования зигзагообразного стежка регулирующих приспособлений и различных, необходимых в остальных случаях соединительных элементов позволяет достичь и целого ряда других существенных преимуществ. Благодаря тому, что у ткацких станков, оснащенных предлагаемым в изобретении механизмом регулирования зигзагообразного стежка, не требуется предусматривать никаких дополнительных устанавливаемых сверху элементов конструкции для размещения предвключенных зевообразовательных механизмов типа жаккардовых машин, значительно уменьшается габаритная высота, в результате чего улучшается обзор и упрощается доступ ко всему ткацкому станку, что в свою очередь с эргономической точки зрения существенно улучшает обзор и упрощает обслуживание механизма регулирования зигзагообразного стежка и прежде всего зевообразовательного механизма, делая более удобным рабочее место у такого механизма. В результате упрощается проведение наладочных и профилактических работ, а также снижается риск травматизма.
Кроме того, изготовление и техническое обслуживание нового механизма регулирования зигзагообразного стежка требуют низких затрат благодаря небольшому количеству деталей, которые к тому же конструктивно являются относительно простыми.
Предпочтительные варианты выполнения механизма регулирования зигзагообразного стежка представлены в пп.2-27 формулы изобретения.
Существуют различные возможности выполнения регулирующих приспособлений. Так, например, на регулируемую нить можно подавать электрический импульс с целью отклонить ее к захватчику на величину сдвига при поперечном перемещении нити. Подобный вариант возможен, однако, лишь в том случае, когда нить реагирует на электрический импульс. Более предпочтителен вариант выполнения согласно п.2 формулы изобретения, поскольку регулирующая прорезь обеспечивает захват нити с геометрическим замыканием и ее смещение на требуемую величину сдвига независимо от свойств самой этой нити. Предпочтителен далее вариант согласно п.3 формулы, позволяющий направлять нить вдоль пути всего ее поперечного, соответственно возвратно-поступательного перемещения.
Выполнение регулирующих приспособлений согласно п.4 в виде пластин позволяет получить наиболее компактную конструкцию, что повышает возможности ее использования прежде всего при управлении основными нитями в ткацком станке. При этом регулирующие приспособления могут быть выполнены в соответствии с п.5 или 6 формулы изобретения.
В соответствии с п.7 формулы захватчик нити может перемещаться по всей длине поперечного перемещения нити. Однако более предпочтителен вариант в соответствии с п.8 формулы изобретения, согласно которому удается не только сократить величину хода захватчика нити, но и повысить гибкость регулирования.
Особо предпочтительным является вариант выполнения механизма регулирования зигзагообразного стежка согласно п.9 формулы изобретения, в соответствии с которым захватчик нити имеет действующий только в одном направлении перемещения нитезахватный крючок для захвата нити с геометрическим замыканием. В другом направлении возврат нити в исходное положение происходит предпочтительно с силовым замыканием, причем собственного натяжения нити может оказаться достаточным для этого. При необходимости могут быть предусмотрены и дополнительные нитенатяжители. В особых случаях механизм регулирования зигзагообразного стежка можно выполнить в соответствии с п.10 формулы с захватчиком основной нити, обеспечивающим захват нити с геометрическим замыканием в обоих направлениях ее перемещения.
Существуют различные возможности выполнения и расположения захватчика основной нити, наиболее предпочтительные из которых представлены в пп.11-13 формулы изобретения.
Для приводного устройства также существуют различные варианты его выполнения, при этом некоторые наиболее предпочтительные из них представлены в пп.14-16 формулы изобретения. Кроме того, приводное устройство согласно п.17 может быть выполнено с возможностью активизации в одном направлении действия развиваемого им усилия и возврата пружиной в другом направлении.
Регулирующее приспособление согласно п.18 может быть установлено с возможностью поворота на величину сдвига, необходимого для захвата и отпускания нити захватчиком, предпочтительно на опорной планке. В пп.19 и 20 формулы представлены предпочтительные варианты выполнения поворотных регулирующих приспособлений.
Однако наиболее предпочтительным является вариант выполнения механизма регулирования зигзагообразного стежка согласно п.21. Возвратно-поступательно перемещаемый в продольном направлении регулирующий элемент позволяет использовать для его расположения и привода различные варианты. Так, например, согласно п.22 приводное устройство может быть соединено с нижним концом регулирующего элемента. Предлагаемый в изобретении механизм может иметь и конструкцию, представленную в п.23. Подобный механизм регулирования зигзагообразного стежка напоминает известную в настоящее время жаккардовую машину, однако в данном случае приводное устройство должно совершать не полный ход, а лишь перемещаться на величину, соответствующую величине сдвига, необходимого для захвата и отпускания нити захватчиком, благодаря чему такой механизм может иметь существенно более простую конструкцию и меньшие размеры в сравнении с жаккардовой машиной, а для перемещения на столь сравнительно небольшую величину сдвига, необходимого для захвата и отпускания нити захватчиком, затрачивается существенно меньше энергии по сравнению с известными на сегодняшний день жаккардовыми машинами.
Наиболее простую и прежде всего компактную конструкцию имеет механизм регулирования зигзагообразного стежка, выполненный в соответствии с п.24.
Согласно п.25 захватчик основной нити целесообразно располагать на подъемной планке подъемного устройства.
Предлагаемый в изобретении механизм регулирования зигзагообразного стежка может найти применение в различных целях, например для избирательного подвода уточных нитей различных цветов и качества для их захвата прокладчиком уточной нити. Наиболее предпочтителен, однако, вариант, согласно которому механизм регулирования зигзагообразного стежка в соответствии с п.26 является узлом зевообразовательного механизма ткацкого станка, при этом имеется несколько подобных механизмов регулирования зигзагообразного стежка, служащих для регулирования поперечного перемещения основных нитей в ткацком станке. Для каждого регулирующего элемента может быть предусмотрено собственное приводное устройство, что позволяет расширить возможности по управлению механизмом регулирования зигзагообразного стежка. Для более простых случаев более предпочтительным может оказаться и вариант выполнения механизма согласно п.27.
Предлагаемый в изобретении механизм регулирования зигзагообразного стежка более подробно поясняется на примере некоторых вариантов его выполнения со ссылкой на прилагаемые схематичные чертежи, на которых показано:
на фиг. 1 - первый вариант выполнения механизма регулирования зигзагообразного стежка в зевообразовательном механизме ткацкого станка, вид сбоку;
на фиг. 2 - механизм регулирования зигзагообразного стежка по фиг. 1 в увеличенном масштабе;
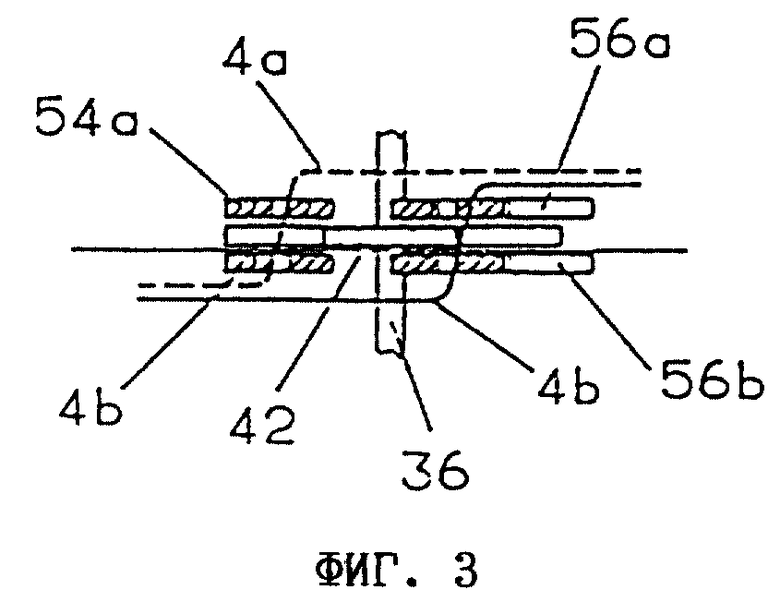
на фиг. 3 - механизм регулирования зигзагообразного стежка по фиг. 2 в сечении плоскостью III-III по фиг.2;
на фиг. 4 - диаграмма, поясняющая различные фазы перемещения элементов изображенного на фиг.1-3 механизма регулирования зигзагообразного стежка;
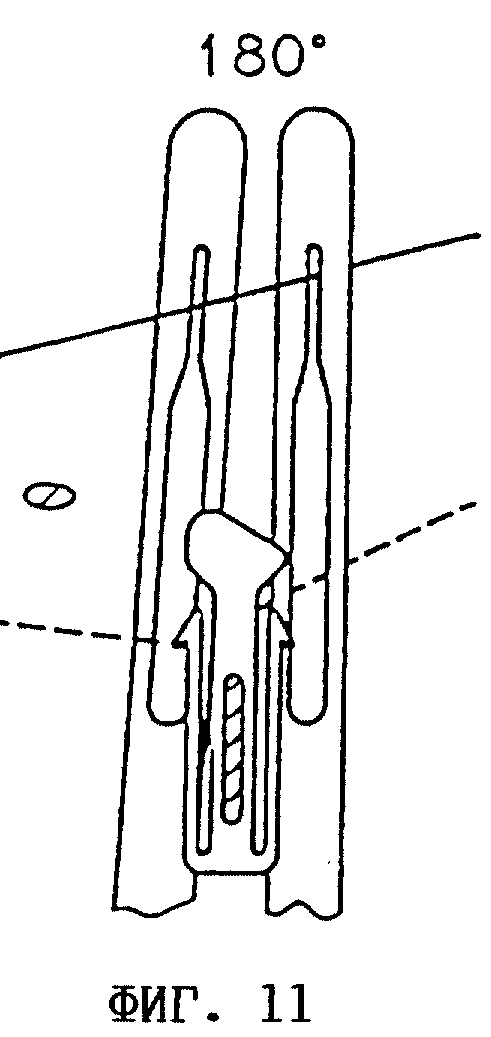
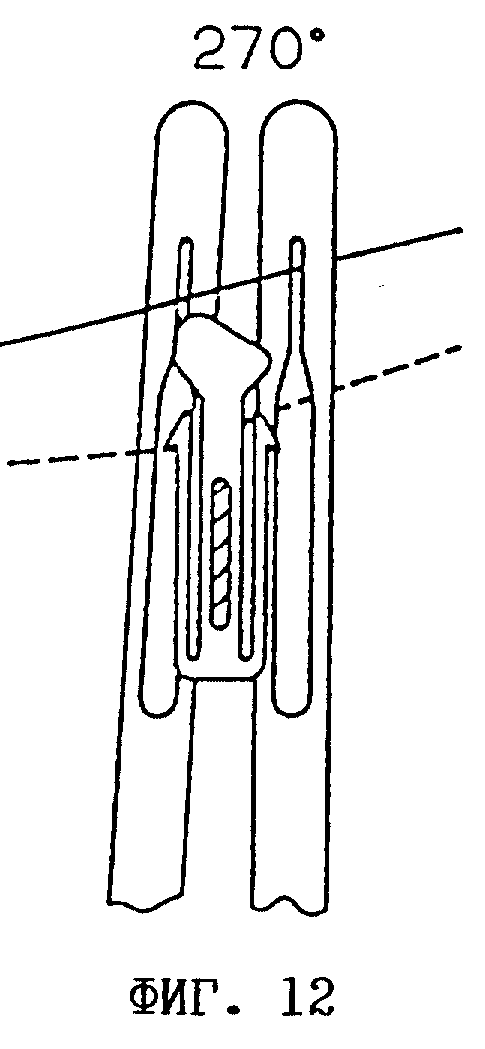
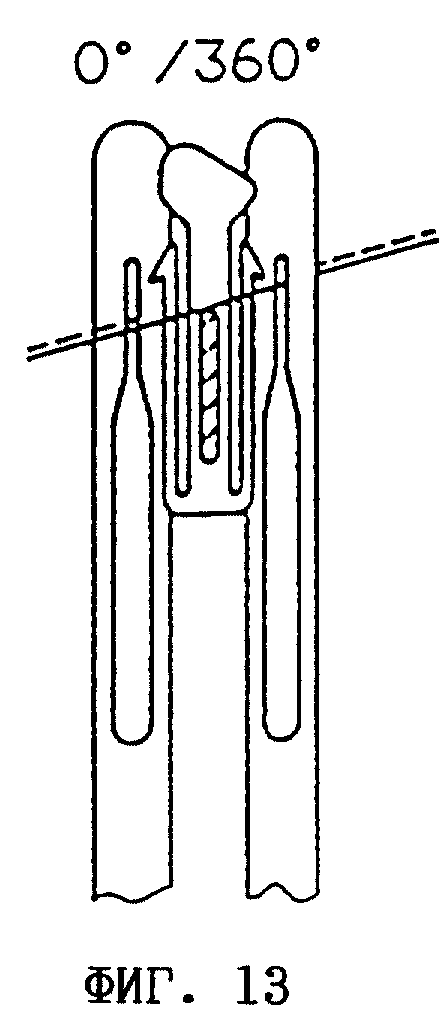
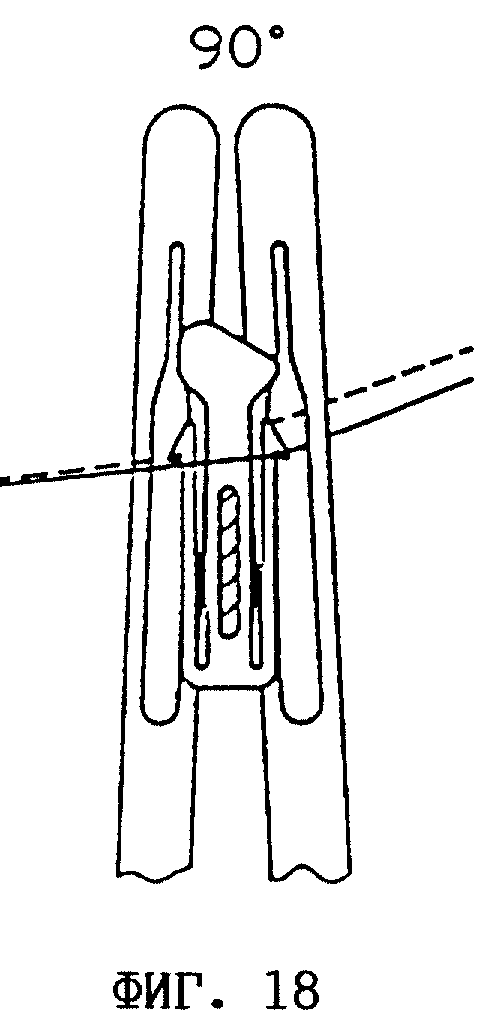
на фиг. 5-20 - различные фазы перемещения элементов механизма регулирования зигзагообразного стежка по фиг.1-3, при этом захватчики нити показаны открытыми, т.е. для большей наглядности расположенная спереди часть регулирующего приспособления не изображена;
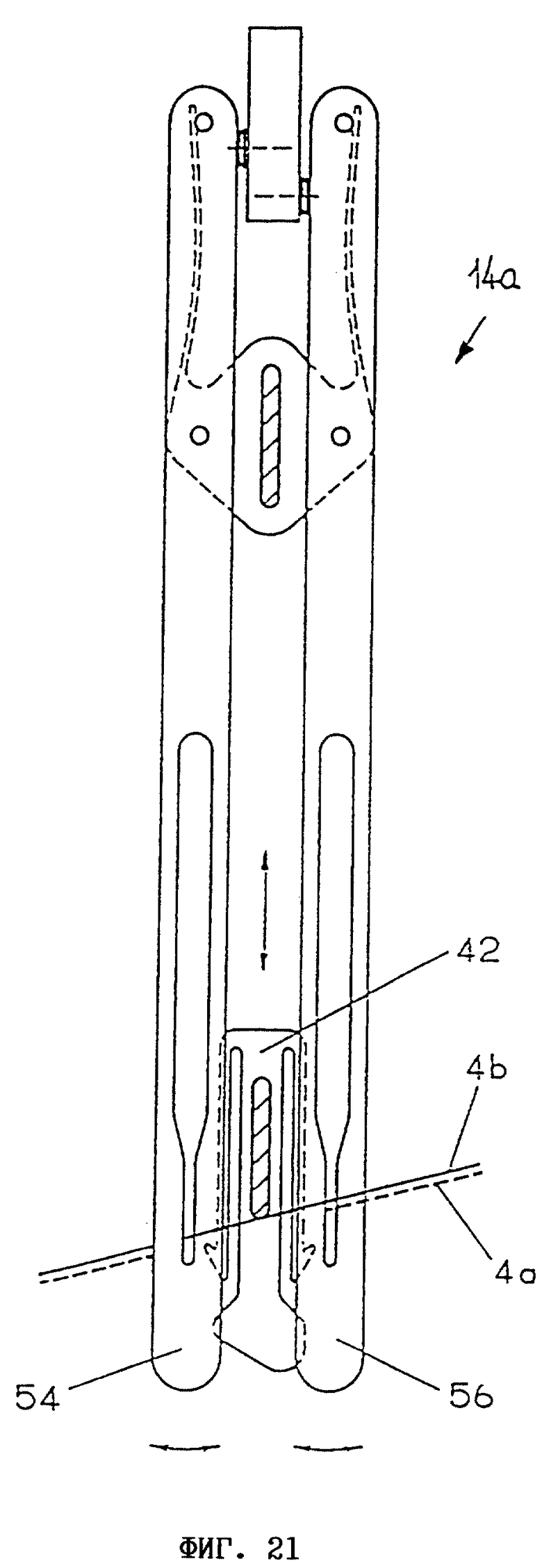
на фиг.21 - механизм регулирования зигзагообразного стежка по фиг.1-20, элементы которого перемещаются из исходного положения в верхнее положение;
на фиг.22 - третий вариант выполнения механизма регулирования зигзагообразного стежка с пьезоэлектрическим управлением;
на фиг.23 - четвертый вариант выполнения механизма регулирования зигзагообразного стежка с одним регулирующим элементом и двумя захватчиками нити, перемещающимися из среднего исходного положения,
на фиг. 24 - пятый вариант выполнения механизма регулирования зигзагообразного стежка с совершающим циклическое движение в продольном направлении регулирующим элементом, выполненным из двух пластин, и функционально связанными с ним захватчиками нити;
на фиг. 25 - механизм регулирования зигзагообразного стежка в сечении плоскостью XXV-XXV по фиг.24 в увеличенном масштабе;
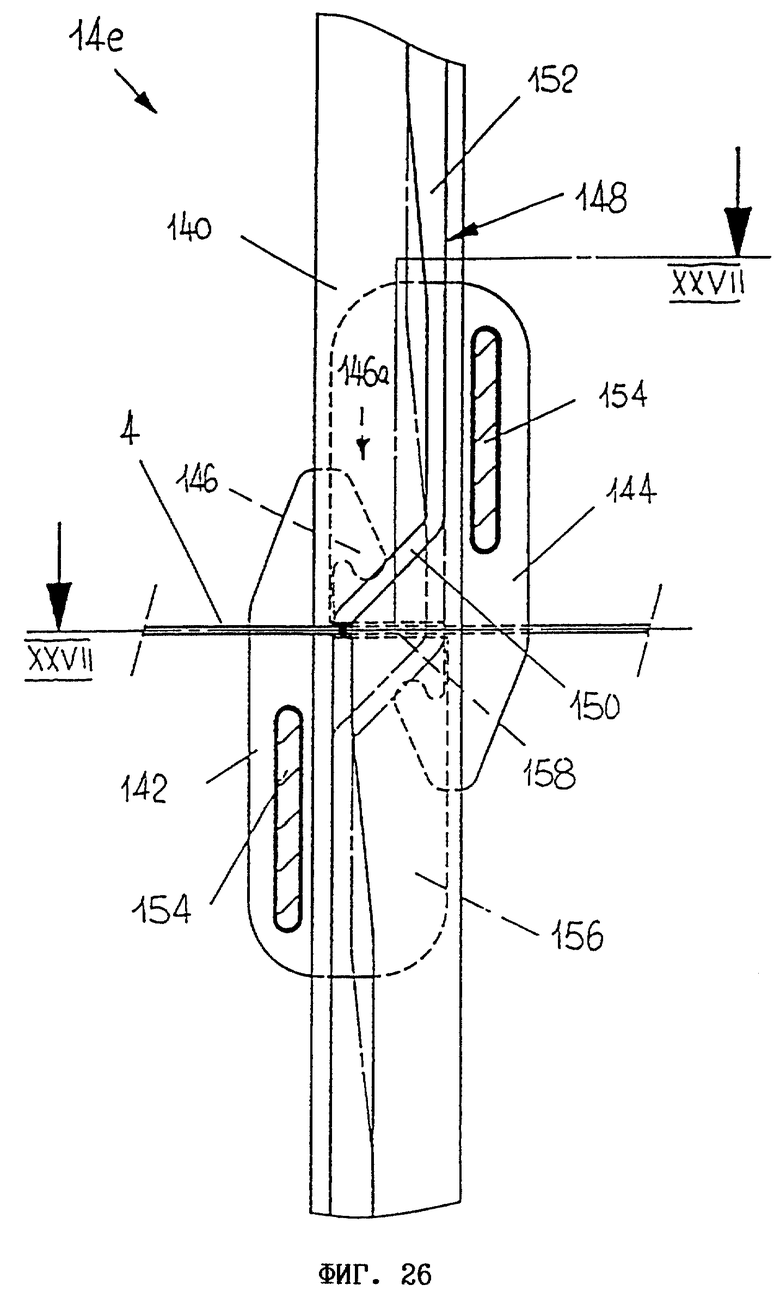
на фиг. 26 - шестой вариант выполнения механизма регулирования зигзагообразного стежка, аналогичный варианту по фиг.24 и 25, но с регулирующим элементом, выполненным из трех пластин, и функционально связанными с ним захватчиками нити;
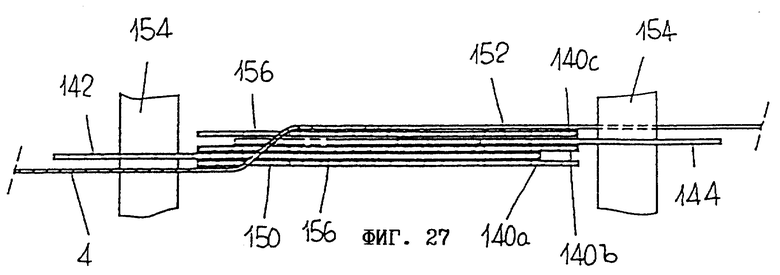
на фиг. 27 - механизм регулирования зигзагообразного стежка в сечении плоскостью XXVII-XXVII по фиг.26 в увеличенном масштабе;
на фиг. 28 - схематичное изображение седьмого варианта выполнения механизма регулирования зигзагообразного стежка, аналогичного варианту по фиг. 24-27, с одним приводным устройством;
на фиг. 29-33 - механизм регулирования зигзагообразного стежка по фиг. 24-28 при различных фазах регулирования перемещения нити;
на фиг. 34 - кинематическая характеристика захватичкиков нити, соответствующая различным фазам регулирования перемещения нити, показанным на фиг.29-33;
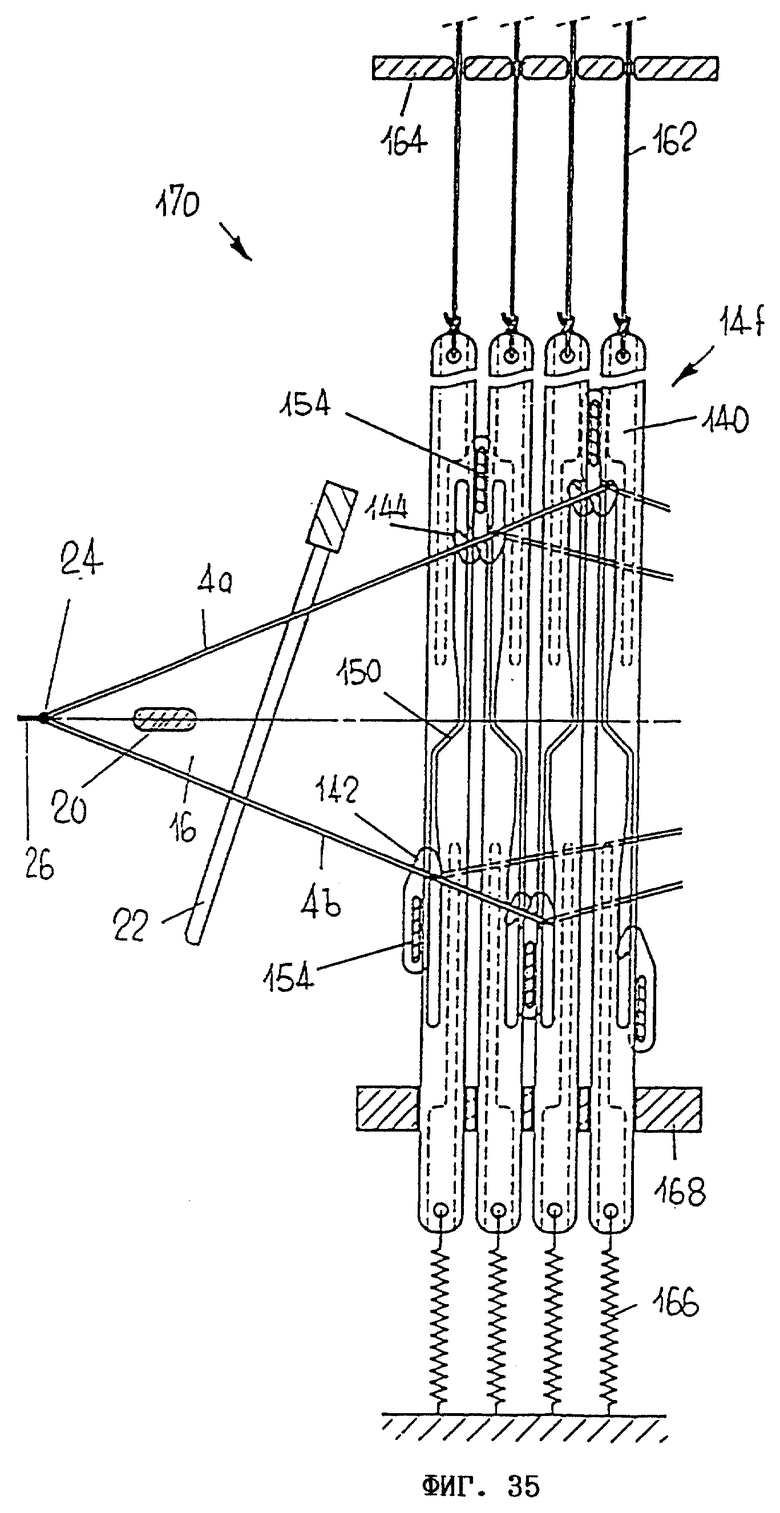
на фиг.35 - механизм регулирования зигзагообразного стежка по фиг.24-33 в зевообразовательном механизме ткацкого станка в положении с открытым зевом;
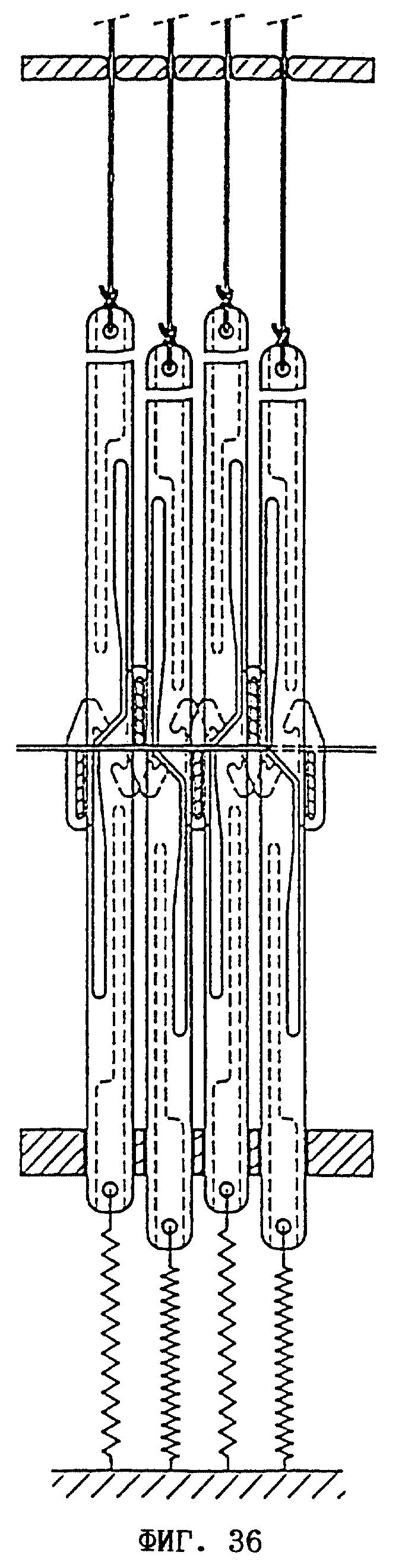
на фиг. 36 - зевообразовательный механизм по фиг.35 в положении с закрытым зевом;
на фиг.37 - вид спереди ткацкого станка с механизмом регулирования зигзагообразного стежка по фиг.35 и 36, имеющим индивидуальное раппортное управление;
на фиг. 38 - еще один ткацкий станок с механизмами регулирования зигзагообразного стежка по фиг.35 и 36, приводные устройства которого приводят в действие по несколько регулирующих элементов в зависимости от раппорта;
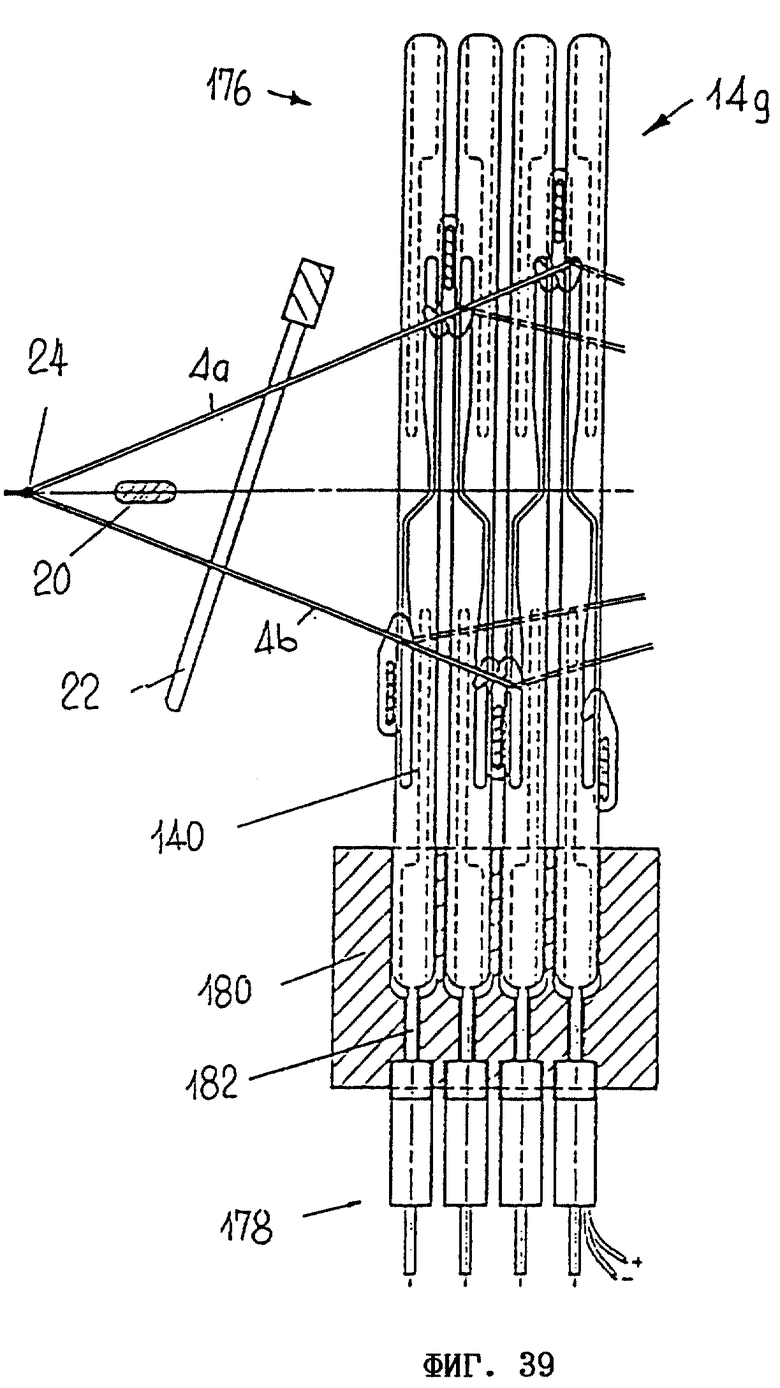
на фиг.39 - восьмой вариант выполнения механизма регулирования зигзагообразного стежка, который аналогичен механизму по фиг.24-27, но имеет приводное устройство другой конструкции, в зевообразовательном механизме в положении с открытым зевом;
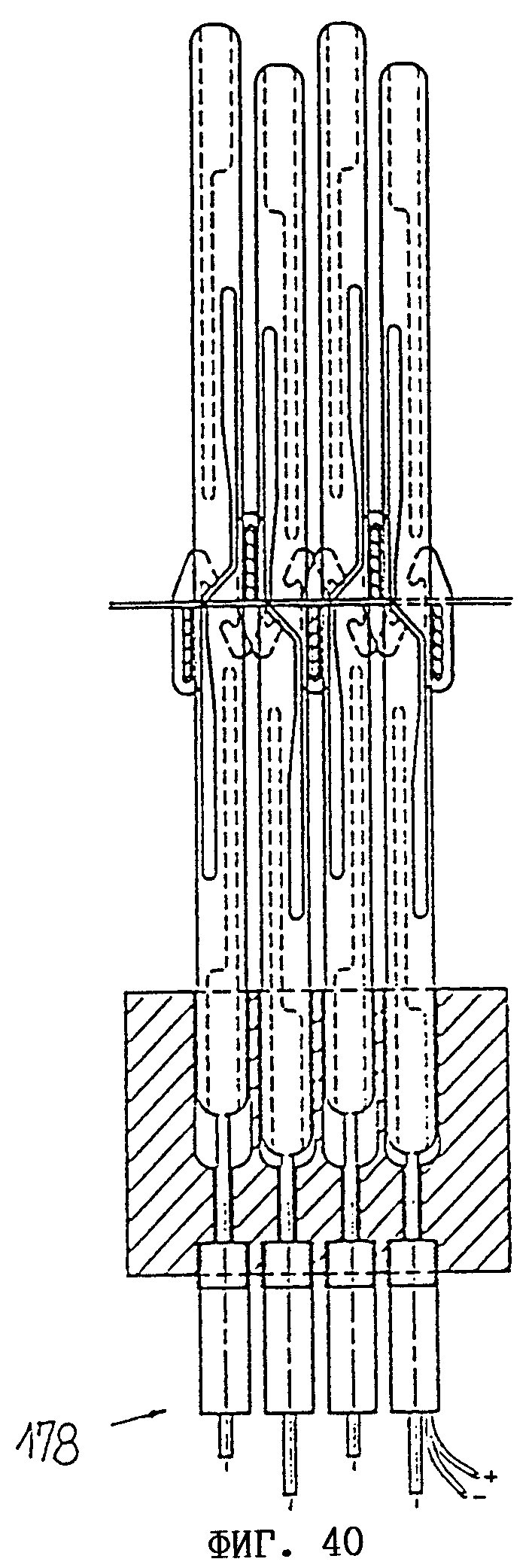
на фиг.40 - зевообразовательный механизм по фиг.39 в положении с закрытым зевом;
на фиг.41 - приводное устройство зевообразовательного механизма по фиг. 39 и 40, выполненное в виде пневматического поршневого блока;
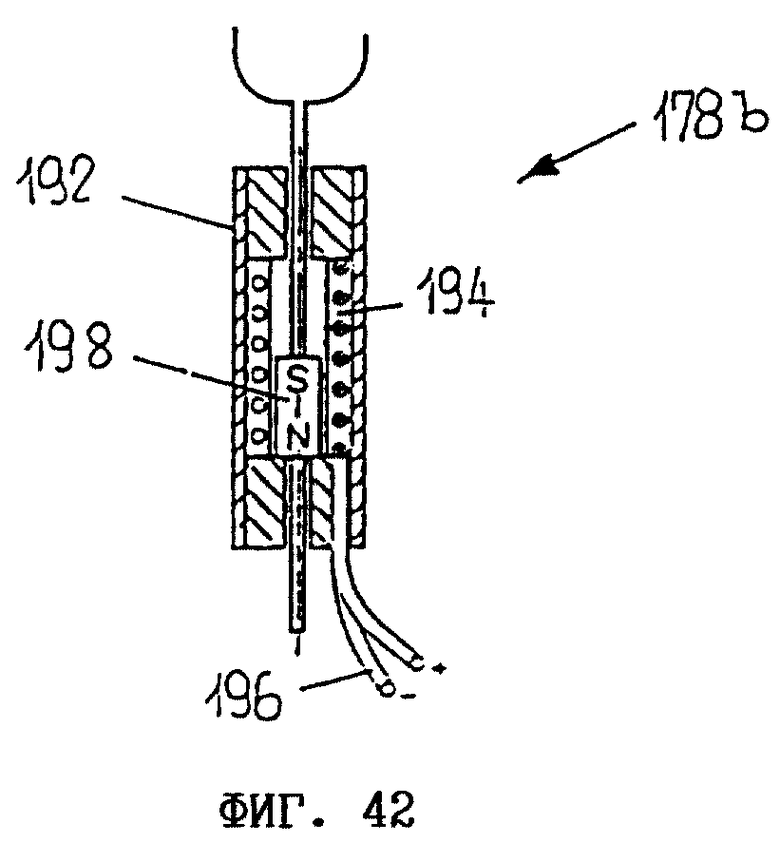
на фиг.42 - приводное устройство зевообразовательного механизма по фиг. 39 и 40, выполненное в виде электромагнита;
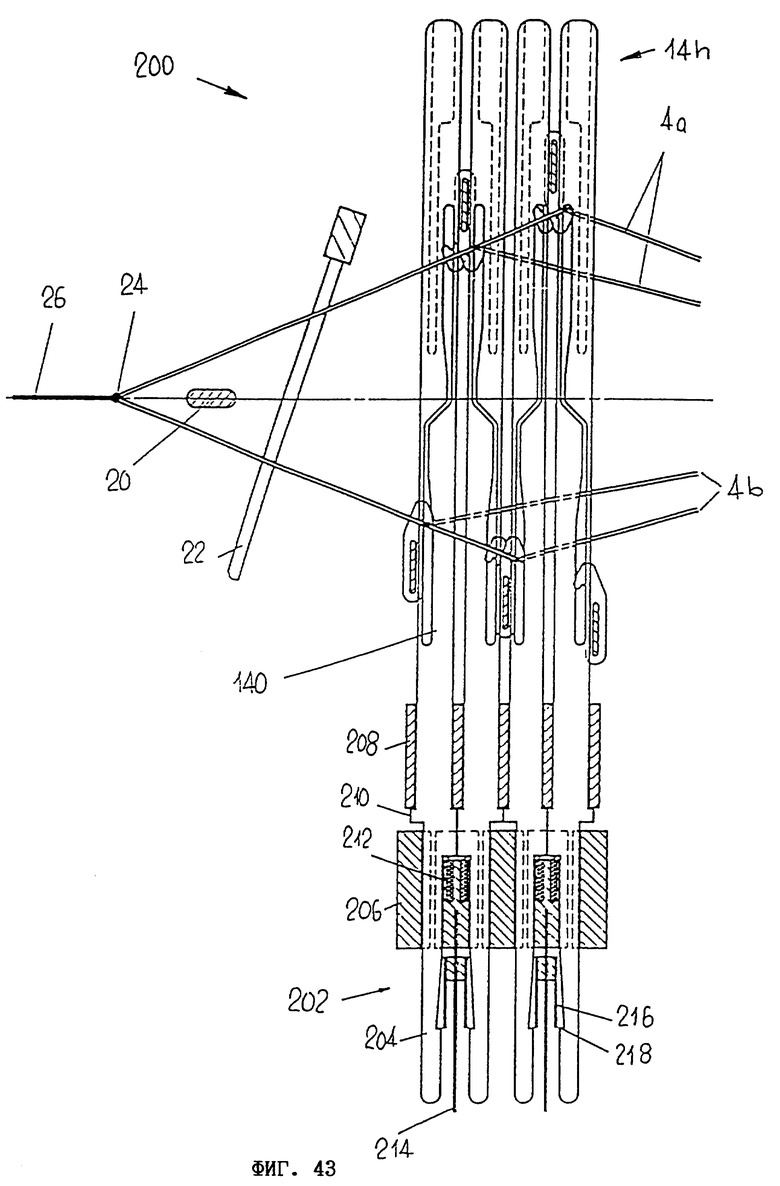
на фиг. 43 - девятый вариант выполнения зевообразовательного механизм с механизмами регулирования зигзагообразного стежка, которые аналогичны механизму по фиг.24-27, но имеют приводное устройство иной конструкции;
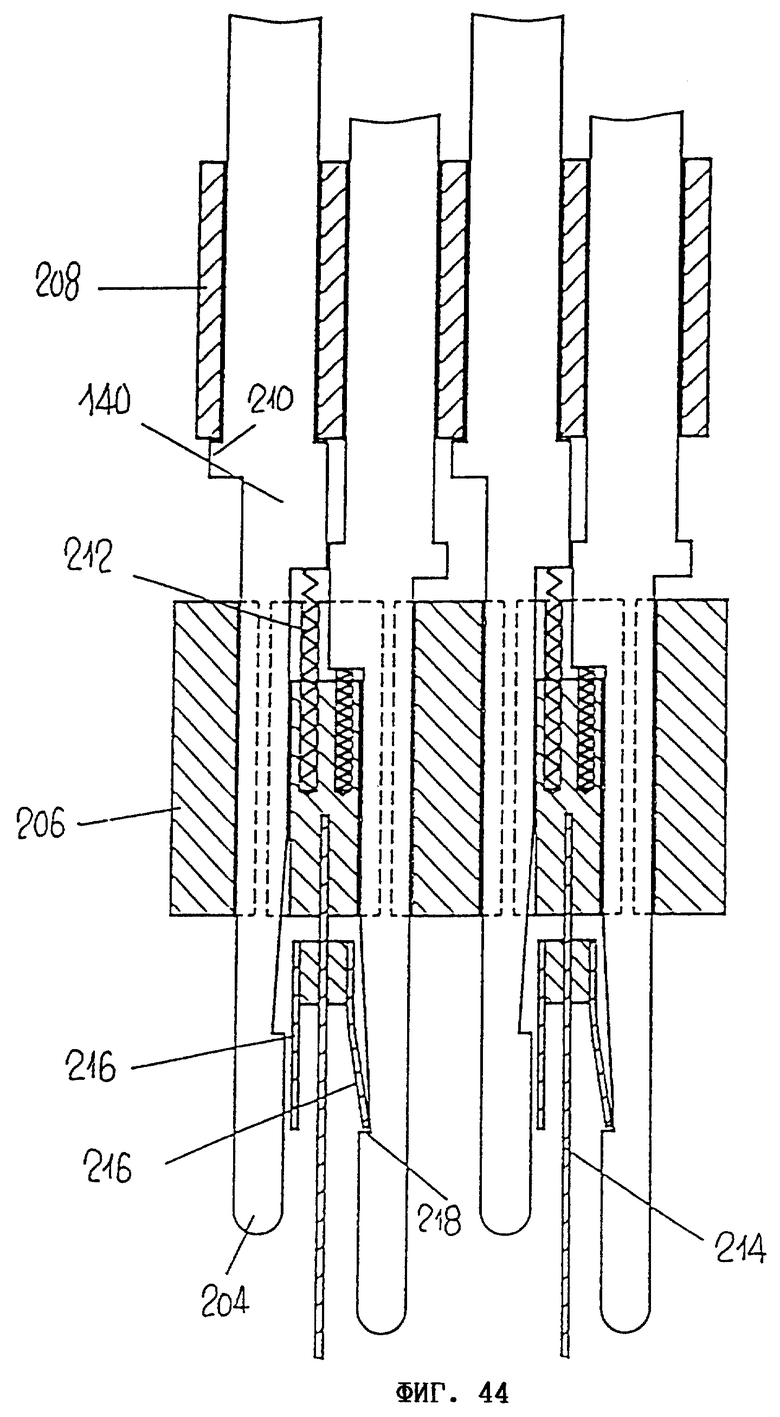
на фиг.44 - приводные устройства зевообразовательного механизма по фиг. 43 в увеличенном масштабе;
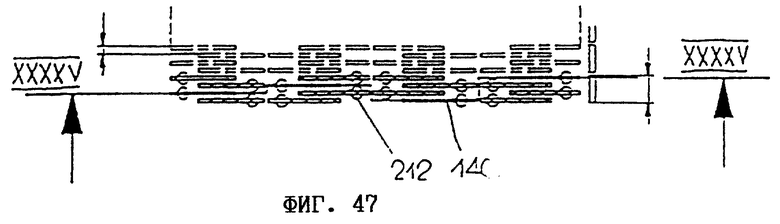
на фиг. 45 - приводные устройства по фиг.43 и 44, но несколько иной конструкции, в сечении плоскостью XXXXV-XXXXV по фиг.47 и в верхнем положении;
на фиг.46 - приводные устройства по фиг.45 в нижнем положении;
на фиг.47 - вид сверху системы регулирующих элементов по фиг.45 и 46;
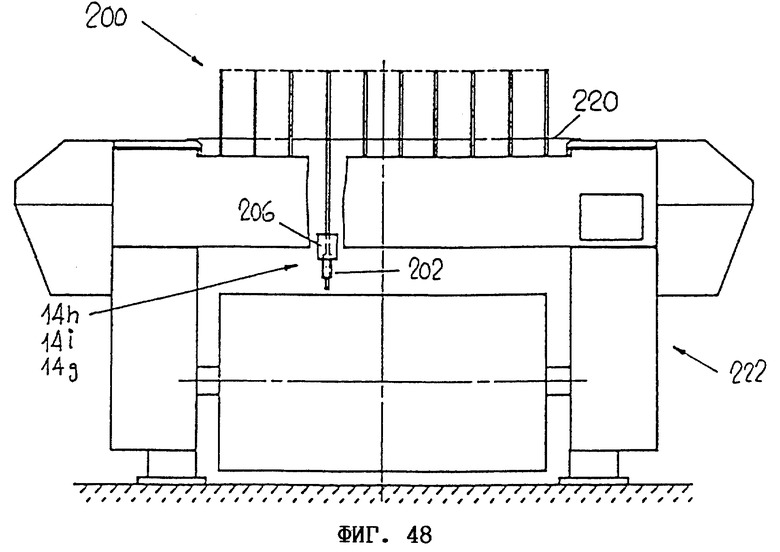
на фиг.48 - вид спереди ткацкого станка с механизмами регулирования зигзагообразного стежка по фиг.38-47 с непосредственным приводом регулирующих элементов.
Варианты выполнения изобретения
На фиг.1 схематично показана конструкция ткацкого станка. Сматываемые с навоя 2 основные нити 4 подаются через натяжное устройство 6 на первое скало 8 и далее на второе скало 10, между которыми расположены основонаблюдатели 12. Со второго скала 10 основные нити 4 проходят через несколько объединенных в один зевообразовательный механизм 13 механизмов 14 регулирования зигзагообразного стежка, которые образуют из основных нитей 4 открытый зев 16, и далее поступают в ручей 18, где в открытый зев 16 вводятся уточные нити 20, которые затем бердом 22 прибиваются к опушке 24 ткани. Сотканное таким путем текстильное полотно 26, направляемое тканенаправителем 28 приемного устройства 30, наматывается на товарный валик 32.
Зевообразовательный механизм 13 выполнен из отдельных, подробно показанных на фиг.2 и 3 механизмов 14 регулирования зигзагообразного стежка, и имеет подъемное устройство 34 с подъемной планкой 36, которая приводным эксцентриком 40 приводится через шатун 38 в вертикальное возвратно-поступательное движение. На подъемной планке 36 расположены в ряд захватчики 42 основной нити, выполненные в виде пластин и имеющие с противоположных сторон пружинящие язычки 44, на свободных концах каждого из которых предусмотрено по нитезахватному крючку 46, 48 для захвата по одной основной нити 4а, 4b. Каждый нитезахватный крючок имеет на свободном конце направляющий скос 50, который набегает на нить и который облегчает благодаря своей форме захват основной нити крючком. Перед нитезахватными крючками 46, 48 расположен нитеразделитель 52, предотвращающий непроизвольное зацепление основных нитей этими крючками 46, 48.
Для каждого крючка 46, 48 в каждом захватчике 42 основной нити предусмотрены регулирующие элементы 54, 56, управляемые приводным устройством 58, 60 при захвате соответствующей основной нити 4а, 4b крючком 46, 48 захватчика. Эти приводные устройства 58, 60 кабелем 62 соединены с блоком 64 управления, который не рассматриваемым более подробно, но известным образом управляет приводными устройствами в соответствии с узором, который должно иметь изготавливаемое текстильное полотно. Каждый регулирующий элемент 54, 56 состоит из двух регулирующих пластин 54а, 54b, соответственно 56а, 56b, между которыми размещен захватчик 42 основной нити. Регулирующие элементы 54, 56, соответственно их регулирующие пластины 54а, 54b, соответственно 56а, 56b установлены на общем держателе 66 с возможностью поворота вокруг оси 68, причем величина их хода при повороте соответствует лишь величине сдвига, необходимого для ввода основной нити в захватчики и для ее вывода из них. Держатель 66 установлен в ряду с другими держателями на неподвижной опорной планке 70 и имеет пружинящие лапки 72, каждая из которых взаимодействует с упором 74, расположенным между регулирующими пластинами 54а, 54b, соответственно 56а, 56b, и поджимает последние к приводному устройству 58, 60.
Как показано на фиг.1 и прежде всего на фиг.2-20, регулирующие элементы имеют прорези 76, которые на участке исходного положения основных нитей 4а, 4b выполнены в виде узких регулирующих прорезей 78, переходящих в направлении возвратно-поступательного перемещения нитей в более широкие направляющие прорези 80.
Ниже принцип работы зевообразовательного механизма наглядно поясняется со ссылкой на фиг.1-20. Исходное положение основных нитей определяется прямой линией, соединяющей второе скало 10 с тканенаправителем 28. Это исходное положение соответствует также положению верхней ветви зева, из которого основные нити 4, 4а, 4b выборочно переводятся со сдвигом на величину хода Н в положение нижней ветви зева, как показано на чертежах. Захват одной из основных нитей 4, 4а, 4b происходит лишь в том случае, когда эта основная нить будет зацеплена в ее верхнем положении с помощью соответствующего регулирующего элемента 54, 56 соответствующим нитезахватным крючком 46, 48 (фиг.5, 9 и 17). С этой целью по сигналу от блока 64 управления задействуется соответствующее приводное устройство 58, 60, которым соответствующий регулирующий элемент 54, 56 поворачивается навстречу соответствующему нитезахватному крючку 46, 48, в результате чего последний при движении захватчика 42 вниз увлекает за собою нить в нижнее положение (фиг.1, 2, 7, 11 и 19). Возврат основной нити из нижнего положения в верхнее происходит при перемещении захватчика 42 вверх прежде всего за счет силы собственного натяжения этой основной нити. Перемещению вверх может дополнительно способствовать укладка основной нити на подъемную планку, расположенную непосредственно под нитезахватным крючком. При необходимости нитезахватный крючок можно также выполнить в виде двойного крючка 48а, как это показано штриховой линией на фиг.2. Вывод основной нити из нитезахватного крючка 46, 48 происходит по достижении захватчиком 42 и, следовательно, основной нитью 4а, 4b исходного положения. В этом положении приводное устройство 58, 60 отключается, в результате чего регулирующий элемент 54, 56 под действием развиваемого пружинящей лапкой 72 усилия поворачивается назад в исходное положение (фиг.13-16), в котором невозможен захват основных нитей захватчиком 42.
В рассматриваемом примере захватчик 42 основной нити имеет два нитезахватных крючка 46, 48, с которыми функционально связаны соответственно два регулирующих элемента 54, 56, в результате чего один захватчик может выборочно перемещать две основные нити 4а, 4b из положения верхней ветви зева в положение нижней ветви зева, как это прежде всего поясняется на диаграмме по фиг. 4 и показано на соответствующих фиг.5-20, на которых проиллюстрированы отдельные фазы перемещения нити. В соответствии с этим количество размещаемых на подъемной планке 36 захватчиков 42 должно быть в два раза меньше количества самих основных нитей, а количество регулирующих элементов 54, 56 на опорной планке 70 должно соответствовать количеству основных нитей. Выполненные в виде пластин захватчики 42 и регулирующие элементы 54, 56 имеют соответствующую небольшую толщину, которая может составлять, например, от 0,1 до 0,5 мм. При необходимости может оказаться целесообразным распределить требуемое количество захватчиков 42 и регулирующих элементов 54, 56 по двум и более подъемным планкам 36 и опорным планкам 70.
Как следует из приведенного выше описания, в зевообразовательном механизме нового типа не требуется использование нижних кареток, представляющих собой пружинные устройства для опускания ремизок, а количество деталей, необходимых для регулирования перемещения основных нитей, за счет непосредственного регулирования этого перемещения сокращено до минимума, что позволяет значительно снизить величину приводных усилий по сравнению с усилиями, которые требуется создавать в обычных механизмах. Благодаря этому не только обеспечивается существенная экономия энергии, но и создается возможность значительно повысить скорость работы подобного ткацкого станка, например, до 5000 оборотов в минуту и более.
На фиг. 21 показан механизм 14а регулирования зигзагообразного стежка, который по своей конструкции в основном соответствует механизму, показанному на фиг. 1-20, за исключением того, что в данном варианте этот механизм расположен не под полотном, образуемым основными нитями 4а, 4b, а над ним, и поэтому нейтральное положение основных нитей соответствует положению нижней ветви зева, а основные нити переводятся захватчиком 42 в положение верхней ветви зева.
У показанного на фиг.22 зевообразовательного механизма, сформированного из механизмов 14b регулирования зигзагообразного стежка, захватчики 82 основной нити расположены в ряд на подъемной планке, являющейся частью ремизной рамки 84, перемещаемой, как известно, вверх и вниз. Захватчики в этом варианте также имеют нитезахватные крючки 46, 48, а также выступы 86, 88, способствующие возврату основных нитей в исходное положение. С захватчиком 82, соответственно с нитезахватными крючками 46, 48 функционально связаны регулирующие элементы 90, 92, которые в свою очередь имеют прорезь 76, образованную регулирующей прорезью 78 и направляющей прорезью 80, и установленные на опорной планке 94 с возможностью поворота. С дальней от основных нитей 4а, 4b стороны каждый регулирующий элемент имеет приводной рычаг 96. Каждый приводной рычаг 96 имеет управляющий упор 98, а также предварительно сжатую пружину 100, поджимающую управляющий упор 98 к в данном случае электрическому переключательному элементу 102, так называемому пьезоэлементу, работающему на изгиб. При отключенном переключательном элементе 102 управляющий упор 98 упирается в него, а регулирующий элемент удерживается в нейтральном исходном положении. При активизации же переключательного элемента 102 по сигналу от блока 64 управления, поступающему по кабелю 104, этот переключательный элемент 102 отклоняется в показанное штриховой линией положение, а регулирующий элемент 90 может под действием предварительно сжатой пружины 100 повернуться, следуя за перемещениями приводного устройства, выполненного в виде приводной управляющей планки 106, входящей в поводковый паз 108 на нижнем конце приводного рычага 96. Этот поводковый паз 108 имеет такую ширину, что приводное устройство может свободно перемещаться в нем при застопоренном переключательным элементом 102 в исходном положении приводном рычаге 96. При включенном переключательном элементе 102 приводной рычаг 96 прижимается предварительно сжатой пружиной 100 к управляющей планке 106 и в результате начинает следовать за перемещением управляющей планки 106, благодаря чему регулирующий элемент 90, соответственно элемент 92, зацепляет соответствующую основную нить 4а, 4b за соответствующий нитезахватный крючок 46, 48. Каждый из показанных на фиг.22 штриховой линией управляющих упоров 98а-98п соответствует одному из расположенных последовательно в ряд регулирующих элементов, а каждый из последних в свою очередь взаимодействует с собственным, не показанным на чертеже переключательным элементом.
На фиг.23 показан механизм 14с регулирования зигзагообразного стежка, у которого для захвата одной основной нити 4 предусмотрено два захватчика 110, 112, перемещающих основную нить из ее нейтрального положения, соответствующего положению заступа, в положение верхней, соответственно нижней ветви зева. Захватчики 110, 112 расположены на соответствующих подъемных планках 114, 116, и каждый из них имеет на конце пружинящего язычка 118 нитезахватный крючок 120, 122. С обоими захватчиками 110, 112 функционально связан общий регулирующий элемент 124, который установлен на опорной планке 126 с возможностью поворота и который с дальней от основной нити 4 стороны имеет приводной рычаг 128, взаимодействующий с двумя приводными устройствами 130, 132, приводные усилия которых направлены навстречу друг другу и которые поворачивают регулирующий элемент 124 к одному или другому захватчику 110, 112. Регулирующий элемент 124 имеет в свою очередь прорезь 134 для регулирования перемещения основной нити, причем эта прорезь в месте нейтрального положения основной нити 4 выполнена в виде узкой регулирующей прорези 136, переходящей как сверху, так и снизу в более широкие направляющие прорези 138, 140. Принцип работы этого механизма аналогичен принципу работы механизма регулирования зигзагообразного стежка, описанному выше.
На фиг.24 и 25 показан еще один вариант выполнения механизма 14d регулирования зигзагообразного стежка с регулирующим элементом 140, с которым функционально связаны расположенные по обеим его сторонам захватчики 142, 144 основной нити с нитезахватными крючками 146. Захватчики 142, 144 перемещаются навстречу друг другу из показанного на фиг.24 положения заступа вниз, соответственно вверх. Регулирующий элемент 140 имеет прорезь 148, которая в положении заступа выполнена в виде регулирующей прорези 150, к которой с обеих сторон примыкают направляющие прорези 152. Регулирующая прорезь 150 расположена с таким наклоном относительно продольного направления регулирующего элемента 140, чтобы регулирующий элемент при своем циклическом (возвратно-поступательном) продольном движении перемещался на величину сдвига S, как это показано штрихпунктирной линией на фиг.24. При перемещении регулирующего элемента из показанного на фиг.24 сплошной линией положения в положение, показанное штрихпунктирной линией, основная нить 4 переводится из зоны действия левого захватчика 142 в зону действия правого захватчика 144, в результате чего основная нить при подъеме этого захватчика подъемной планкой 154 не изображенного подробно подъемного устройства может быть переведена из положения заступа в положение верхней ветви зева. Как показано, в частности, на фиг.25, регулирующий элемент 140 выполнен пластинчатым и состоит из регулирующих пластин 140а и 140b, между которыми заключены захватчики 142, 144 основной нити, которые проходят по части их ширины и также выполнены в виде пластин.
На фиг.26 и 27 показан механизм 14е регулирования зигзагообразного стежка, который по своей конструкции в основном соответствует механизму, показанному на фиг.24 и 25, но регулирующий элемент которого имеет дополнительную регулирующую пластину 140с, в результате чего каждый из захватчиков 142, 144 основной нити расположен между отделенными друг от друга регулирующими пластинами 140а, 140b соответственно 140b и 140с. Благодаря этому захватчики можно выполнить более широкими, и поэтому они перекрываются с регулирующими пластинами по большей площади, что обеспечивает более надежное направленное перемещение этих захватчиков вдоль регулирующих пластин. При этом захватчики 142, 144 могут иметь выступающий за нитезахватный крючок 146 участок 156, который, образуя с крючком 146 своего рода двойной крючок 146а, задействуется для возврата основной нити 4 из положения верхней, соответственно нижней ветви зева, и способствует таким путем активному управлению перемещением основной нити при формировании зигзагообразного стежка. Между уширенными участками 156 захватчиков 142, 144 в показанном на фиг.26 положении заступа образуется зазор 158, способствующий переводу основной нити по регулирующей прорези 150 из одного положения в другое.
На фиг. 28-33 показан другой вариант конструктивного исполнения представленных на фиг.24, 25, соответственно 26, 27 механизмов 14f регулирования зигзагообразного стежка и их приводных устройств, при этом на фиг.29-33 показаны различные фазы перемещения элементов этих механизмов при управлении основной нитью. Перемещением показанных на фиг.28-32 регулирующих элементов 140 управляет пневматическое приводное устройство 160, с которым соответствующий регулирующий элемент 140 соединен аркатным шнуром 162, проходящим от приводного устройства 160 к регулирующему элементу 140 через кассейную доску 164.
Такое приводное устройство служит в первую очередь для создания направленного вверх движения, тогда как движение в обратном направлении обеспечивает возвратная пружина 166, которая соединена с перемещающимся в направляющей 168 нижним концом регулирующего элемента 140. Кинематическая характеристика захватчиков 142, 144 представлена на диаграмме перемещений по фиг. 34. Основная нить 4 левым захватчиком 142 переводится из положения заступа, показанного на фиг.29, к нижнему зеву в положение, показанное на фиг. 30. Из этого положения основная нить затем при возврате захватчика 142 снова переводится в положение заступа, показанное на фиг.31, при этом основная нить 4 передается с помощью регулирующей прорези 150 регулирующего элемента 140 на правый захватчик 144. Последний увлекает ее к верхнему зеву в показанное на фиг.32 положение, из которого эта нить затем снова переводится правым захватчиком 144 в положение заступа, показанное на фиг.33.
На фиг. 35 и 36 показана система из нескольких механизмов 14f регулирования зигзагообразного стежка по фиг.28-33 в зевообразовательном механизме 170 ткацкого станка, при этом указанные механизмы регулирования зигзагообразного стежка могут быть расположены как в один ряд последовательно один за другим, так и в несколько рядов рядом друг с другом, что зависит от плотности (степени заполнения) изготавливаемого текстильного полотна 26, соответственно от плотности управляемых основных нитей 4а, 4b. На фиг.35 зевообразовательный механизм показан в положении с открытым зевом при прокладке в зеве 16 уточной нити 20, которую затем бердо 22 прибивает к опушке 24 ткани. На фиг.36 зевообразовательный механизм показан в положении с закрытым зевом.
На фиг.37 представлен вид спереди ткацкого станка с механизмами 14f регулирования зигзагообразного стежка по фиг.35 и 36 и зевообразовательным механизмом 170. Как показано на фиг.37, ткацкий станок имеет станину 172, в которой расположен зевообразовательный механизм 170 с механизмами 14d, 14e, соответственно 14f регулирования зигзагообразного стежка, служащий для непосредственного управления не показанными основными нитями в соответствии с раппортом. Каждый регулирующий элемент 140 оттягивается вниз предварительно растянутой возвратной пружиной 166 и соединен проходящим через кассейную доску 164 аркатным шнуром 162 с отбирающим устройством 174, в состав которого входят приводные устройства 160. На фиг.38 показан еще один ткацкий станок, в котором одно приводное устройство 160а отбирающего устройства 174а и зевообразовательного механизма 170а одновременно обслуживает несколько регулирующих элементов в соответствии с шириной Т раппорта.
На фиг. 39-42 показан еще один вариант выполнения зевообразовательного механизма 176 с механизмами 14g регулирования зигзагообразного стежка, которые конструктивно соответствуют показанным на фиг.24-27 механизмам 14d и 14e регулирования зигзагообразного стежка, но имеют иные приводные устройства 178. В данном случае нижние концы регулирующих элементов 140 установлены в направляющей 180 и соединены соединительными элементами 182 с расположенными ниже приводными устройствами 178. Последние приводят в действие регулирующие элементы по отдельности. Как показано на фиг.41, подобное приводное устройство 178а может быть выполнено в виде пневматического поршневого блока. Соединенный с соединительным элементом 182 поршень 184 удерживается в цилиндре 186 в нижнем положении предварительно сжатой возвратной пружиной 188. При подаче в цилиндр по подводящему каналу 190 сжатого воздуха поршень, а вместе с ним и регулирующий элемент приподнимаются. На фиг.42 показан другой вариант выполнения приводного устройства 178b. В этом случае приводное устройство выполнено в виде электромагнита и имеет размещенную в корпусе 192 катушку 194, к которой по проводам 196 подается управляющий ток. В катушке 194 расположен подвижный постоянный магнит 198, который соединительным элементом 182 соединен с регулирующим элементом 140. На фиг.39 зевообразовательный механизм показан в положении с открытым зевом, а на фиг.40 - в положении с закрытым зевом.
На фиг.43 и 44 показан следующий вариант выполнения зевообразовательного механизма 200 с механизмами 14h регулирования зигзагообразного стежка, которые конструктивно соответствуют показанным на фиг.24-27 механизмам регулирования зигзагообразного стежка, но с другим исполнением приводных устройств 202. В данном случае каждый регулирующий элемент 140 имеет на нижнем конце соответствующий направляющий элемент 204, который перемещается вверх и вниз в направляющей 206. Для привода регулирующих элементов используются перемещаемые вверх и вниз делительные ножи 208, каждый из которых взаимодействует с частью 210 захватчика на регулирующем элементе 140. Предварительно сжатая пружина 212 в направляющей 206 поджимает регулирующий элемент 140, а тем самым и часть 210 захватчика к делительному ножу 208, благодаря чему регулирующий элемент 140 может повторять возвратно-поступательное перемещение делительного ножа. С нижней стороны направляющей 206 расположена управляющая пластина 214, несущая пьезоэлектрические переключательные элементы 216, которые в выключенном состоянии обеспечивают свободное перемещение направляющего элемента 204 и вместе с ним регулирующего элемента, а во включенном состоянии, т.е. в активизированном состоянии, упираются в уступ 218, не допуская в результате перемещения части 210 захватчика и вместе с ней регулирующего элемента 140 вслед за делительным ножом 208. За счет этого регулирующий элемент стопорится одним из активизированных переключательных элементов, что исключает возможность передачи соответствующей основной нити 4 от одного захватчика 142 на другой захватчик 144 и тем самым ее перемещение из нижнего положения в верхнее, и наоборот.
На фиг. 45-47 показан еще один вариант выполнения механизма 14i регулирования зигзагообразного стежка, который соответствует механизму 14h по фиг. 43 и 44, но приводные устройства которого 202а имеют управляющие пластины 214а с двумя расположенными один под другим рядами переключательных элементов 216, 216а, которые включаются попеременно, если смотреть в продольном направлении делительных ножей 208. В соответствии с этим вариантом направляющие элементы 204а отличаются друг от друга расположением уступов 218, 218а, которые у двух соседних управляющих элементов выполнены на разной высоте. Благодаря этому механизмы регулирования зигзагообразного стежка можно размещать с высокой плотностью и, следовательно, увеличить количество основных нитей, приходящееся на один сантиметр. На фиг.45 делительные ножи показаны в верхнем положении, а на фиг.46 - в нижнем положении, при этом отдельные переключательные элементы 216, 216а показаны в активизированном, т. е. в отклоненном вбок положении, в котором они упираются в уступы 218, 218а направляющих элементов 204а.
Показанный на фиг.48 ткацкий станок имеет зевообразовательный механизм 200 по фиг.39-43 с механизмами 14g, 14h, 14i регулирования зигзагообразного стежка по фиг.39-47. При этом направляющая 206 с приводными устройствами 202 расположена под ткацкой зоной 220 в станине 222 станка, обеспечивая сверху свободный доступ к ткацкой зоне.
В описанных выше вариантах выполнения механизмы регулирования зигзагообразного стежка используются каждый раз для управления основными нитями с целью зевообразования в ткацком станке. Однако такие механизмы регулирования зигзагообразного стежка можно использовать и для управления другими нитями и в иных целях, в частности для отбора уточных нитей, подача которых осуществляется либо отдельно от основных нитей, либо прежде всего аналогично основным нитям.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСШНУРОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ НИТЯМИ | 2003 |
|
RU2299935C2 |
| ТКАЦКИЙ СТАНОК С ПНЕВМАТИЧЕСКОЙ ПРОКЛАДКОЙ УТОЧНОЙ НИТИ | 1997 |
|
RU2176294C2 |
| РАПИРА И УСТРОЙСТВО ПРОКЛАДКИ УТОЧНОЙ НИТИ ДЛЯ РАПИРНОГО ТКАЦКОГО СТАНКА | 1999 |
|
RU2208073C2 |
| ТКАЦКАЯ МАШИНА С ПНЕВМАТИЧЕСКОЙ ПРОКИДКОЙ УТКА | 1995 |
|
RU2135656C1 |
| БЕСЧЕЛНОЧНЫЙ ЛЕНТОТКАЦКИЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ УЗКИХ ТКАНЫХ ИЗДЕЛИЙ, А ТАКЖЕ УЗКОЕ ТКАНОЕ ИЗДЕЛИЕ | 2001 |
|
RU2239009C2 |
| ТЕКСТИЛЬНАЯ МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ТЕКСТИЛЬНЫХ ИЗДЕЛИЙ ИЗ НИТЕЙ | 1996 |
|
RU2143019C1 |
| ТКАЦКИЙ СТАНОК, ПРЕЖДЕ ВСЕГО ЛЕНТОТКАЦКИЙ СТАНОК | 2004 |
|
RU2337188C2 |
| ТКАЦКАЯ МАШИНА | 1995 |
|
RU2145651C1 |
| ЛЕНТОТКАЦКИЙ СТАНОК | 1995 |
|
RU2129174C1 |
| РЕМИЗНЫЙ МЕХАНИЗМ | 1995 |
|
RU2117084C1 |






























Изобретение относится к области текстильного машиностроения и касается механизма регулирования зигзагообразного стежка для выборочного регулирования циклического поперечного перемещения нити, прежде всего основной нити в ткацком станке, имеющего по меньшей мере одно приводимое в циклическое движение подъемное устройство, по меньшей мере один захватчик нити, а также по меньшей мере одно приводимое в действие приводным устройством регулирующее приспособление для выборочного захвата нити захватчиком, при этом регулирующее приспособление расположено независимо от подъемного устройства захватчика, при этом в совокупности этот механизм выполнен таким образом, что регулирующее приспособление выборочно циклически перемещает нить на величину сдвига непосредственно к захватчику и от него. Данный механизм имеет повышенные скоростные характеристики. 26 з.п. ф-лы, 48 ил.
| WO 9711215 А, 27.03.1997 | |||
| Устройство для упаковки плоских изделий | 1975 |
|
SU536092A1 |
| Способ изготовления фрикционных изделий | 1955 |
|
SU108700A1 |
| RU 94033110 А1, 10.07.1996. | |||

