Изобретение относится к рапире рапирного ткацкого станка согласно ограничительной части п. 1 формулы изобретения и к устройству прокладки уточной нити с такой рапирой.
Для прокладки уточной нити используют либо одну рапиру для сквозной прокидки уточной нити через зев, либо пару из передающей и захватывающей рапир, при этом уточная нить передается внутри зева с передающей рапиры на захватывающую рапиру. Рапиры имеют зажимы для нити или нитезахватчики, управление которыми в первом из указанных вариантов осуществляется вне зева, а во втором варианте является активным, т.е. осуществляется непосредственно в самом зеве. Для этой цели используют механические или электромеханические средства (GB 2059455 А; ЕР 0690160 А), при этом приводной элемент, управляющий разжимом или смыканием нитезахватчика, расположен вне зева, соответственно под ним. Недостатки такой конструкции, проявляющиеся прежде всего при передаче нити внутри зева, состоят в основном в следующем.
При использовании механических средств приводной элемент необходимо вводить между нитями основы, чтобы можно было управлять нитезахватчиками.
При использовании электромагнитных средств вне зева необходимо устанавливать отключающий электромагнит. В результате увеличивается воздушный зазор между якорем и магнитным сердечником, что требует создания магнитного поля большей напряженности, т.е. необходимо увеличивать количество ампер-витков в обмотке. Инерционность в срабатывании этого электромагнита снижает скорость работы ткацкого станка.
При передаче нити внутри зева пути перемещения рапир в зоне ее передачи пересекаются. Иными словами, передача нити происходит в то время, когда передающая и захватывающая рапиры еще находятся в движении. В этот момент нитезахватчик приводится в действие, что заключается в нажатии на него приводным элементом. Вследствие этого такие участвующие в приведении в действие этого нитезахватчика детали как гибкая либо жесткая тяга рапиры, соответственно планка батана и направляющая гибкой либо жесткой тяги рапиры, подвержены высокой нагрузке и износу. Кроме того, при приложении такого нажимного усилия гибкая рапира прижимается к нитям основы, что приводит в результате к их обрыву. По вышеуказанным причинам гибкую рапиру и ее направляющие приходится усиливать. Выполнение этих элементов более массивными приводит в свою очередь к увеличению массы подвижных деталей, что противоречит требованию максимально возможного снижения этой массы, и, как следствие, к снижению частоты вращения вала двигателя ткацкого станка. Помимо этого необходимо учитывать и тот факт, что рапиры из-за высокой скорости работы зевообразовательного механизма вибрируют внутри зева в зоне передачи нити и могут сталкиваться с приводными элементами. В результате необходимо принимать особые меры, чтобы в максимально возможной степени снизить вибрацию с подобной частотой и амплитудой.
Величина зажимного усилия определяется, как известно, типом нити. Поэтому при механическом, а также при электромеханическом управлении нитезахватчиком необходимо соответствующим образом регулировать величину этого зажимного усилия. При выработке тканей с использованием нитей различных типов возможности применения подобных систем управления оказываются по меньшей мере ограничены, поскольку, с одной стороны, среднюю величину зажимного усилия необходимо определять экспериментально, а с другой стороны, согласование зажимного усилия в процессе работы ткацкого станка и прежде всего вдоль пути движения нити между указанными приводными элементами невозможно и поэтому не предусмотрено.
Еще один недостаток описанных выше конструкций состоит в том, что в каждой точке приложения управляющего воздействия должна быть предусмотрена соответствующая система приводных элементов для управления нитезахватчиком, а именно такими точками являются:
а) для передающих рапир: точка приведения в действие в середине зева,
б) для захватывающих рапир: точка приведения в действие в середине зева,
в) для передающих рапир: точка управления заводкой нити со стороны введения утка в зев,
г) для захватывающих рапир: точка отпускания нити со стороны улавливателя,
д) для передающих рапир: точка управления продувкой со стороны введения утка в зев.
Таким образом, необходимы пять систем приводных элементов, приведение в действие которых должно осуществляться раздельно.
С этим в свою очередь связаны следующие недостатки:
1) необходимость в техническом обслуживании пяти систем,
2) высокая частота выхода из строя,
3) снижение коэффициента полезного действия,
4) высокие затраты.
Тем самым известные конструкции с индивидуальным управлением нитезахватчиками, прежде всего вдоль пути движения нити между приводными элементами, являются малоэффективными.
Наиболее близкий к указанному в ограничительной части п.1 формулы изобретения прототип описан в заявке ЕР 0690160 А и показан на фиг.17 этой публикации. В этой заявке описана рапира, в корпусе которой имеется приводное устройство, выполненное в виде пьезоэлемента. Расширение этого пьезоэлектрического приводного устройства при подаче определенного электрического напряжения сопровождается смыканием нитезахватчика, т.е. опусканием подвижного зажимного элемента нитезахватчика на неподвижный зажимной элемент. Сжатие пьезоэлектрического приводного устройства в обесточенном состоянии сопровождается разжиманием нитезахватчика, т.е. приподнятием подвижного зажимного элемента нитезахватчика от неподвижного зажимного элемента. Поскольку, однако, усилие, развиваемое при сжатии пьезоэлектрического приводного устройства, невелико, поджатие подвижного зажимного элемента к неподвижному зажимному элементу снижает его эффективность и поэтому является нежелательным и его необходимо избегать. У подобного нитезахватчика зажим может находиться только в двух положениях, а именно в "открытом" или "сомкнутом", при этом невозможно обеспечить первоначальное смыкающее усилие за счет поджатия подвижного зажимного элемента к неподвижному зажимному элементу. При перебоях в электроснабжении такой нитезахватчик автоматически открывается и отпускает уточную нить. Кроме того, из вышеуказанной публикации не очевидна возможность индивидуально регулировать величину усилия, развиваемого этим пьезоэлектрическим приводным устройством. Сложность конструкции и габариты электромагнитных приводов являются ограничивающим условием, из-за которого избегают их установку в корпус рапиры.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача усовершенствовать рапиру указанного в начале описания типа и устранить описанные недостатки.
Эта задача решается в соответствии с отличительными признаками п.1 формулы изобретения.
Благодаря тому, что даже в случае возможных перебоев в электроснабжении подвижный зажимной элемент остается поджат к неподвижному зажимному элементу, обеспечивается надежный захват и надежное удержание уточной нити нитезахватчиком. Кроме того, за счет поджатия подвижного зажимного элемента к неподвижному зажимному элементу нет необходимости в создании слишком большого удерживающего уточную нить усилия, которое должно развивать приводное устройство, поскольку суммарное зажимное усилие складывается из смыкающего усилия А, обеспечиваемого вышеуказанным поджатием одного зажимного элемента к другому, и зажимного усилия В, развиваемого непосредственно приводным устройством. В результате можно использовать приводное устройство меньшей мощности. Вместе с тем разжимающее усилие, противодействующее смыкающему усилию и превосходящее его по величине, обеспечивает надежное разжимание зажима нитезахватчика, причем этот процесс разжимания в свою очередь также может происходить в две стадии, а именно вначале за счет отключения приводного устройства и тем самым снятия зажимного усилия, в результате чего уточная нить будет удерживаться только смыкающим усилием подвижного зажимного элемента, а затем за счет дополнительного создания разжимающего усилия, под действием которого подвижный зажимной элемент будет отжиматься от неподвижного зажимного элемента с образованием между ними свободного зазора для очистки. Кроме того, усилие, развиваемое расположенным в рапире приводным устройством, можно очень точно регулировать во времени и по величине в течение всего ткацкого цикла для согласования такого усилия с требованиями ткацкого процесса. Такая возможность имеет особое значение прежде всего в тех случаях, когда узор вырабатываемой ткани постоянно меняется и необходимо прокидывать уточные нити различной толщины и качества.
Расположенное в рапире приводное устройство активно, т.е. без создания внешних усилий, управляет нитезахватчиком этой рапиры, что исключает приложение какой бы то ни было нагрузки к головке рапиры, к направляющей рапиры и к нитям основы. В результате практически полностью отпадает необходимость в подрегулировке и ремонте указанных деталей рапиры. Помимо этого, предотвращается обрыв нитей основы, что значительно снижает эксплуатационные расходы и значительно повышает производительность процесса выработки тканей. Нитезахватчик можно соответствующим образом регулировать не только при работе ткацкого станка в целом, но и в пределах одного ткацкого цикла по отдельным уточинам, настраивая его под конкретные физические и ткацко-технологические параметры прокладываемой уточной нити. Предусмотренная система управления позволяет задавать и регулировать величину зажимного усилия нитезахватчика.
За один цикл прокладки уточной нити нитезахватчик выполняет следующие операции:
1. передающая рапира забирает уточную нить у нитеподающего устройства и
2. вводит эту уточную нить в зев;
3. примерно на середине зева передающая рапира передает уточную нить захватывающей рапире;
4. в конце цикла прокладки уточной нити нитезахватчик захватывающей рапиры отпускает нить;
5. нитезахватчики разжимаются для очистки и
6. при необходимости изменяется зажимное усилие нитезахватчиков.
Нитезахватчики передающей и захватывающей рапир имеют практически одинаковое конструктивное исполнение, что позволяет управлять приводными устройствами с помощью одного и того же блока управления. В результате значительно сокращаются издержки производства. Использование трансформаторов для приведения в действие нитезахватчика исключает приложение к рапире соответствующих механических нагрузок. Указанные меры позволяют эксплуатировать рапирный ткацкий станок со скоростью до 1000 об/мин и помимо этого использовать такие различные типы нити, как комплексная нить с нулевой круткой или фасонная пряжа с узелками.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его выполнения со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - первый вариант выполнения предлагаемой в изобретении рапиры,
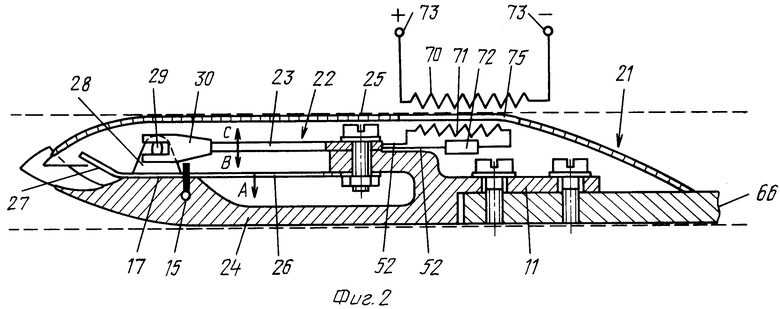
на фиг.2 - второй вариант выполнения предлагаемой в изобретении рапиры,
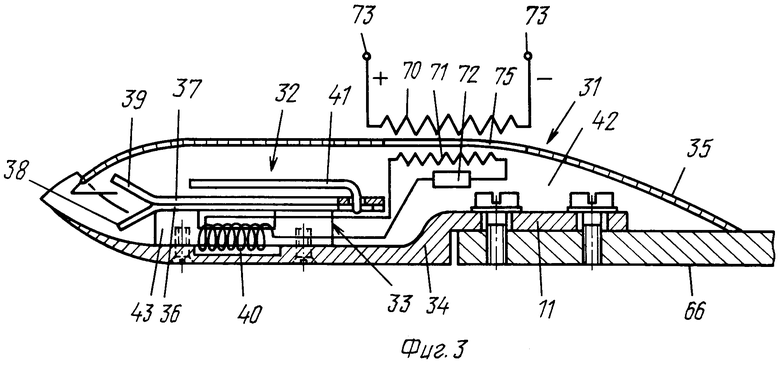
на фиг.3 - третий вариант выполнения предлагаемой в изобретении рапиры,
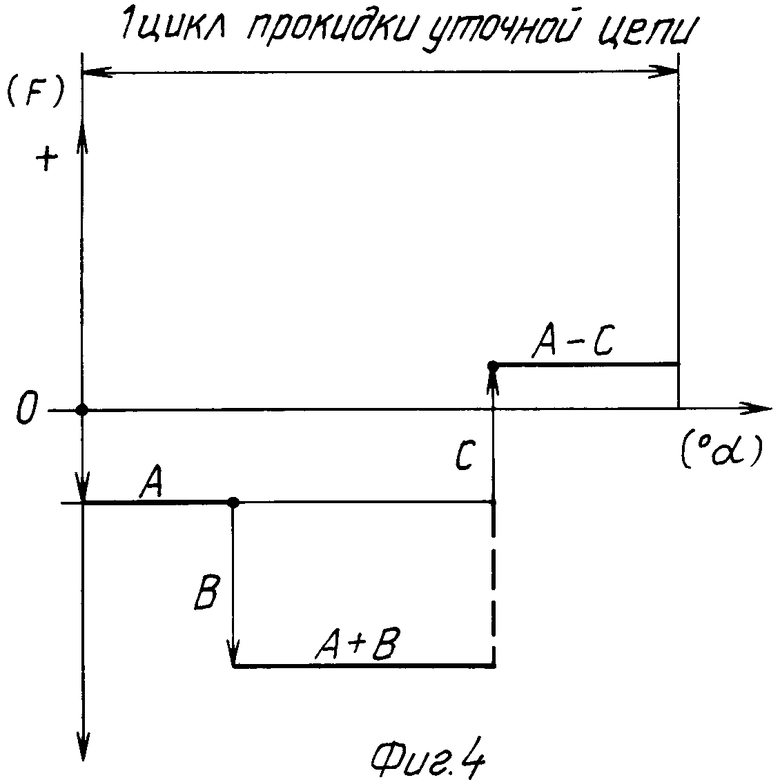
на фиг.4 - диаграмма изменения зажимного усилия в зависимости от времени за один рабочий цикл нитезахватчика, соответствующий одному циклу прокидки уточной нити,
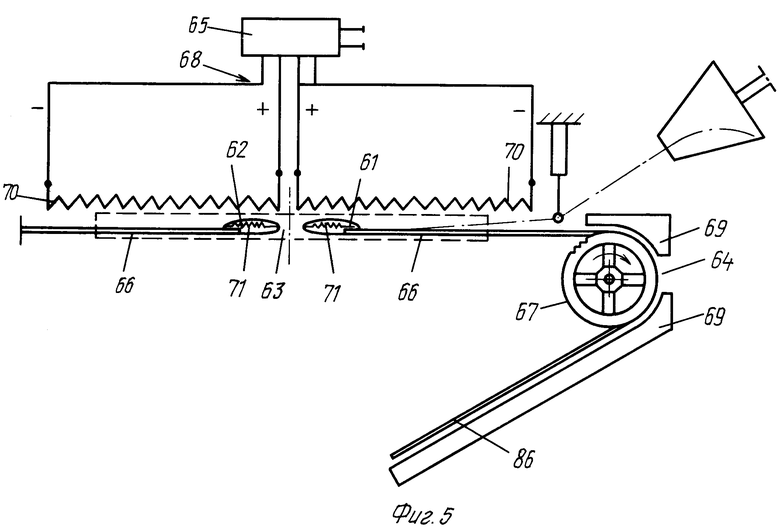
на фиг. 5 - вариант выполнения предлагаемого в изобретении устройства прокладки уточной нити.
На фиг.1 показана предлагаемая в изобретении рапира, выполненная по одному из вариантов. Эта рапира имеет корпус 1, электромагнит 2 и нитезахватчик 3. Корпус 1 состоит из основания 4 и крышки 5, которые соединены друг с другом не показанными на чертеже средствами. Одной стороной электромагнит 2 опирается на основание корпуса. Нитезахватчик 3 имеет зажимной рычаг 6, который выполнен в виде двуплечего рычага, установленного на оси 7 с возможностью поворота вокруг нее, и выполненную на основании 4 зажимную поверхность 8. Одно из плеч рычага имеет зажимной участок 9, который взаимодействует с выполненной на основании 4 зажимной поверхностью и который на свободном конце имеет отогнутый под некоторым углом участок 10, образующий вместе с основанием корпуса входной зазор для уточной нити (не показана). С противоположного входной стороне рапиры конца на основании 4 выполнен соединительный участок 11 для соединения с механизмом перемещения. Кроме того, предусмотрена пружина 12, которой зажимной участок 9 рычага поджимается к зажимной поверхности 8. Помимо этого рапира оснащена ограничителем 15, ограничивающим перемещение уточной нити внутрь нитезахватчика. Для создания поступательного движения с целью приведения в действие зажимного рычага может использоваться линейный электродвигатель или серводвигатель. Преимущество применения подобных приводов состоит в том, что зажимной рычаг можно кинематически связать с приводной осью электродвигателя.
В варианте выполнения по фиг.2 предлагаемая в изобретении рапира имеет корпус 21, нитезахватчик 22 и пьезокварцевый элемент 23. Корпус состоит из основания 24 и крышки 25. Нитезахватчик имеет полосовой зажимной элемент 26 из упругого пружинящего материала и зажимной участок 17, выполненный на основании 24 корпуса. Зажимной элемент 26 одним концом закреплен на основании 24 корпуса, а на другом конце имеет отогнутый под некоторым углом участок 27, который вместе с основанием корпуса образует входной зазор для не показанной на чертеже уточной нити. Зажимной элемент 26 имеет уступ 28 и выступающий перпендикулярно ему штифт 29. Пьезокварцевый элемент 23 одной стороной закреплен на основании корпуса, а с другой стороны имеет соединительный элемент 30, обхватывающий штифт 29. С противоположного входной стороне рапиры конца на основании 24 выполнен соединительный участок 11 для соединения с механизмом перемещения.
Показанная на фиг.3 рапира отличается от изображенного на фиг.1 варианта выполнением и расположением электромагнита. Рапира имеет корпус 31, нитезахватчик 32 и электромагнит 33. Корпус состоит из основания 34 и крышки 35. Нитезахватчик 32 имеет направляющий элемент 36 для не показанной на чертеже уточной нити и зажимной элемент 37. Направляющий элемент 36 выполнен в виде полосы и имеет отогнутый под некоторым углом участок 38. Зажимной элемент 37 также выполнен в виде полосы и также имеет отогнутый под некоторым углом участок 39. Зажимной элемент 37 по плоскости прилегает к направляющему элементу 36, в результате чего их отогнутые участки 38, 39 образуют V-образный входной зазор для непоказанной уточной нити. Электромагнит 33 имеет П-образный сердечник 43 и обмотку 40 и расположен под направляющим элементом таким образом, что последний опирается на торцы боковых сторон сердечника. В этом варианте направляющий элемент 36 выполнен из немагнитного материала, а зажимной элемент 37 образует якорь электромагнита и выполнен из магнитного материала. Основание 34 корпуса и в этом случае имеет соединительный участок 11 для соединения с механизмом перемещения. Вместо упомянутого выше ограничителя перемещения уточной нити в данном варианте для этой цели предусмотрена ограничительная скоба 41.
В каждом из рассмотренных выше вариантов приводное устройство приводится в действие за счет индукции. Для этой цели предусмотрены первичная катушка 70 индуктивности, которая расположена вне рапиры, и вторичная катушка 71 индуктивности, которая расположена соответственно в корпусе 1, 21, 31 рапиры. Кроме того, в корпусе расположены вентильный преобразователь электроэнергии и усилитель 72, которые соединены с приводным устройством соединительными проводами 52. В каждой из крышек 5, 25, 35 предусмотрено отверстие 75.
В рассмотренной ниже фиг.4 за основу взят вариант выполнения по фиг.2. На этом чертеже показана диаграмма, на которой по оси абсцисс отложен угол поворота главного вала ткацкого станка, а по оси ординат отложено зажимное усилие. Как показано на диаграмме, в зависимости от указанного угла поворота нитезахватчик имеет три рабочих положения, а именно сомкнутое положение А, положение зажима А+В, а также разомкнутое положение А-С. Каждому из этих рабочих положений соответствует определенное усилие А, В, С. Смыкающее усилие А создается только пружинящим элементом 26 и действует в том числе и при отключенных ткацком станке и приводном устройстве. Прокладываемая уточная нить сначала заводится в открытый нитезахватчик, после чего она зажимается зажимным усилием В, создаваемым приводным устройством. Зажим уточной нити происходит с усилием, равном сумме усилий А+В. Зажимное усилие В можно бесступенчато регулировать до его максимальной величины во избежание смычки по утку. В процессе передачи уточной нити от передающей рапиры захватывающей рапире по соответствующей управляющей программе происходит реверсирование, соответственно переключение приводных устройств, что сопровождается созданием разжимного усилия, равного разности усилий А-С. По завершении операции прокидки утка может происходить продувка находящегося в разомкнутом положении нитезахватчика. Описанный выше процесс происходит и в передающей, и в захватывающей рапире, но в обратной последовательности выполнения этих циклов.
На фиг.5 показано устройство прокладки уточной нити с передающей рапирой 61, захватывающей рапирой 62, механизмом 64 перемещения, которым передающая, соответственно захватывающая, рапира перемещается по середине 63 рабочей ширины ткацкого станка, и с системой управления приводными устройствами. Транспортирующий механизм 64 имеет гибкую тягу 66 с направляющей 69 и колесо 67, которое кинематически связано с не показанным на чертеже приводом. Гибкая тяга рапиры выполнена из гибкого материала, например из слоистого пластика. Система управления приводными устройствами расположена на участке передачи нити над образуемым зевом и по обе стороны от середины 63 рабочей ширины ткацкого станка. В состав указанной системы входят два трансформатора с воздушным охлаждением или преобразователь, включающий первичную катушку 70 индуктивности и расположенную на рапире 61, 62 вторичную катушку 71 индуктивности, а также блок 65 управления, который проводами 68 соединен с каждой из первичных катушек 70 индуктивности и управляет этими первичными катушками индуктивности в зависимости от угла поворота главного вала ткацкого станка и/или в зависимости от технологических параметров выработки текстильного, соответственно тканого, полотна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОЙ ПРОФИЛЬНОЙ ТКАНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608807C2 |
| РАПИРНЫЙ ТКАЦКИЙ СТАНОК | 1995 |
|
RU2129625C1 |
| ГОЛОВКА РАПИРЫ ДЛЯ ВВОДА УТОЧНЫХ НИТЕЙ В РАПИРНОМ СТАНКЕ | 2011 |
|
RU2542087C2 |
| ТКАЦКИЙ СТАНОК С ПНЕВМАТИЧЕСКОЙ ПРОКЛАДКОЙ УТОЧНОЙ НИТИ | 1997 |
|
RU2176294C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ КРОМКИ ТКАНИ НА РАПИРНОМ ТКАЦКОМ СТАНКЕ | 2007 |
|
RU2388858C1 |
| Приемная рапира для прокладки уточной нити к рапирному ткацкому станку | 1987 |
|
SU1544193A3 |
| ЛЕНТОТКАЦКИЙ СТАНОК | 1995 |
|
RU2129174C1 |
| ТКАЦКАЯ МАШИНА С ПНЕВМАТИЧЕСКОЙ ПРОКИДКОЙ УТКА | 1995 |
|
RU2135656C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ЗИГЗАГООБРАЗНОГО СТЕЖКА | 1998 |
|
RU2184181C2 |
| Приемная рапира для прокладки уточной нити к рапирному ткацкому станку | 1987 |
|
SU1524812A3 |
Изобретение относится к области текстильной промышленности и касается рапиры для рапирного ткацкого станка, имеющей корпус с соединительным участком для соединения с гибкой тягой или жесткой тягой, нитезахватчик с неподвижным зажимным элементом и подвижным зажимным элементом и электрическое приводное устройство, которое расположено в корпусе рапиры и которое функционально связано с подвижным зажимным элементом для его привода и обеспечивает регулирование зажимного усилия нитезахватчика и управления его зажимным циклом, причем подвижный зажимной элемент поджат смыкающим усилием к неподвижному зажимному элементу, а приводное устройство выполнено с возможностью переключения с режима, в котором оно создает зажимное усилие, действующее в том же направлении, что и смыкающее усилие, на режим, в котором оно создает разжимное усилие, которое противодействует указанному смыкающему усилию и превышает его по величине, при этом предусмотрена возможность индивидуально регулировать величину указанных зажимного и разжимного усилий, создаваемых приводным устройством, в течение всего ткацкого цикла. Предложено устройство прокладки утка с этой рапирой. Данное изобретение позволяет повысить надежность работы рапирных механизмов и, следовательно, повысить качество вырабатываемой ткани. 2 с. и 5 з.п. ф-лы, 5 ил.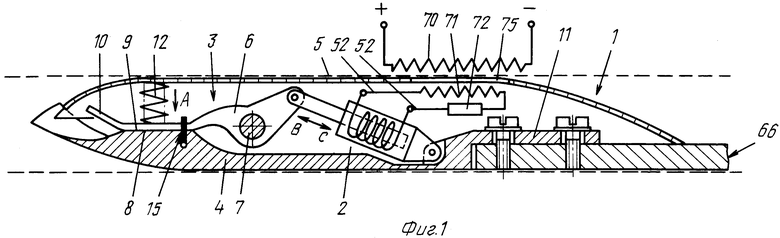
| DE 29808997 U, 30.07.1998 | |||
| Лопастное долото | 1978 |
|
SU690160A1 |
| Устройство для фиксации подушек прокатных валков в станине клети | 1977 |
|
SU624671A1 |
| СПОСОБ ОБРАБОТКИ СТАЛИ | 0 |
|
SU299553A1 |
| GB 2059455 A, 23.04.1981 | |||
| ЗАЖИМНОЕ ПРИСПОСОБЛЕНИЕ РАПИРЫ ДЛЯ ТКАЦКОГО СТАНКА | 1993 |
|
RU2088707C1 |

