Предлагаемое изобретение относится к области вооружения, в частности к области управляемых, вращающихся по углу крена ракет, и может быть использовано в комплексах танкового и противотанкового вооружения, а также малогабаритных зенитных комплексах.
Известно устройство формирования команд управления вращающейся по углу крена ракетой, содержащее последовательно соединенные дешифратор команд, датчик гироскопического координатора и блок рулевого привода (см. [1] стр.36, рис.26).
Дешифратор выделяет сигналы управления, пропорциональные отклонениям ракеты от линии визирования в вертикальной и горизонтальной плоскостях. Гироскопический координатор производит распределение команд управления по каналам курса и тангажа в зависимости от углового положения снаряда по крену. Блок рулевого привода преобразует команды управления в механические угловые перемещения рулей.
Для компенсации фазового запаздывания отработки команд ракетой, возникающего из-за вращения ее по крену и инерционности блока рулевого привода, команды управления подаются на ракету с упреждением. Упреждение обеспечивается установкой крыльев, датчика и щеткодержателя координатора в определенное положение относительно друг друга.
Известное устройство с высокой точностью формирует команды при совпадении частоты вращения ракеты по крену с частотой, в расчете на которую производится компенсация фазового запаздывания отработки команд ракетой.
Однако частота вращения ракеты по крену может изменяться в широком диапазоне, что приведет к появлению нескомпенсированного фазового запаздывания отработки команд управления и, как следствие, к ухудшению точности попадания ракеты в цель.
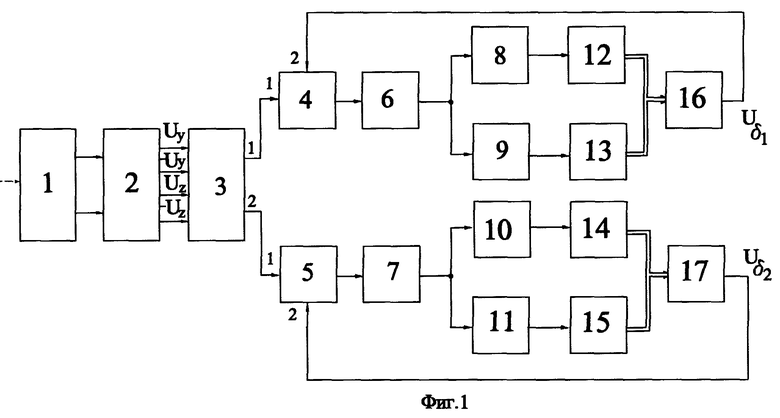
Наиболее близким по технической сущности к заявляемому является устройство формирования команд управления ракеты 9М117 (2), включающее приемник излучения (ПИ), блок аппаратуры электронной (БАЭ), датчик угла крена гироскопического координатора (ДГК), два рулевых привода (РП) с потенциометрами обратной связи (ПОС). Схема устройства представлена на фиг.1.
Оптический сигнал, поступающий в ПИ 1, преобразуется в электрический, усиливается по мощности и поступает в БАЭ 2, в котором осуществляется выделение постоянных составляющих напряжений, пропорциональных величинам отклонений ракеты от оси луча по каждому каналу управления. В БАЭ имеются корректирующие фильтры, которые стабилизируют контур управления ракетой. С выходов корректирующих фильтров напряжения поступают на усилители, выходы которых подключены к двум входам ДГК 3 и через инверторы - к двум другим входам.
Таким образом, на входы ДГК с выхода БАЭ поступают противофазные сигналы +Uy, -Uy вертикального и +Uz, -Uz горизонтального каналов управления.
ДГК преобразует сигналы управления из системы координат наземной аппаратуры управления в систему координат, связанную с вращающейся ракетой. Элемент ДГК, жестко связанный с корпусом гирокоординатора, а через него с корпусом ракеты, при вращении ракеты перемещается относительно токосъемных щеток ДГК, при этом изменяется активное сопротивление между токосъемными точками. В зависимости от углового положения ракеты по крену и величины сигналов управления Uy, Uz токосъемные щетки снимают сигналы соответствующей амплитуды и знака в системе координат, связанной с вращающейся ракетой.
Сигналы с выхода ДГК поступают на сумматоры 4, 5 РП, на вторые входы которых поступают сигналы с ПОС 16, 17, кинематически связанных с рулями. Выходы сумматоров подключены ко входам триггерных устройств 6, 7. Далее сигнал в каждом канале усиливается одним из двух противофазных усилителей мощности 8, 9, 10, 11 в зависимости от фазы поступающего сигнала. С усилителя мощности сигнал поступает в обмотку соответствующего управляющего электромагнита, который управляет работой соответствующей рулевой машинки 12, 13, 14, 15 и обеспечивает пропорциональность угла отклонения руля амплитуде входного сигнала. Вследствие наличия отрицательной обратной связи и триггерного устройства рули работают в автоколебательном режиме.
Известное устройство обеспечивает высокую точность формирования команды управления при совпадении частоты вращения ракеты по крену с некоторой номинальной (средней) частотой, в расчете на которую производится фазирование контура управления посредством упреждающего разворота системы координат, связанной с гирокоординатором, относительно измерительной системы координат носителя, связанной с лучом лазера, на угол, равный фазовому запаздыванию РП на номинальной частоте вращения ракеты по крену.
Однако в реальных условиях частота вращения ракеты по крену может существенно отличаться от указанной номинальной частоты. Кроме того, динамические характеристики РП также имеют разброс и изменяются по времени полета ракеты.
Указанные обстоятельства приводят к появлению расфазировки каналов управления, наличие которой увеличивает время вывода ракеты на линию визирования цели и снижает точность наведения ракеты на цель, а при величине расфазировки, превышающей 20...30°, может произойти срыв наведения.
Задачей предлагаемого изобретения является повышение точности наведения ракеты на цель при отклонениях частоты вращения ракеты по крену относительно номинальной величины и разбросе динамических характеристик РП за счет корректировки фазы входных сигналов РП в соответствии с текущим фазовым запаздыванием выходных.
Поставленная задача решается посредством того, что в устройство, содержащее гироскопический координатор с датчиком угла крена, последовательно соединенные приемник излучения, блок аппаратуры электронной, первый РП с первым сумматором и первым ПОС, второй РП со вторым сумматором и вторым ПОС, введены первый и второй блоки вычитания, первые входы которых соединены соответственно с первым и вторым выходами БАЭ, первый, второй, третий и четвертый модуляторы, причем сигнальные входы первого и третьего модуляторов соединены с выходом первого блока вычитания, а сигнальные входы второго и четвертого модуляторов соединены с выходом второго блока вычитания, третий сумматор и третий блок вычитания, причем первый вход третьего сумматора соединен с выходом первого модулятора, второй вход третьего сумматора соединен с выходом второго модулятора, а выход третьего сумматора соединен со входом первого РП, первый вход третьего блока вычитания соединен с выходом третьего модулятора, второй вход третьего блока вычитания соединен с выходом четвертого модулятора, выход третьего блока вычитания соединен со входом второго РП, пятый, шестой, седьмой и восьмой модуляторы, причем сигнальные входы пятого и шестого модуляторов соединены с выходом ПОС первого РП, а сигнальные входы седьмого и восьмого модуляторов соединены с выходом ПОС второго РП, опорные входы первого, четвертого, пятого и восьмого модуляторов подключены к первому выходу ДГК, опорные входы второго, третьего, шестого и седьмого модуляторов подключены ко второму выходу ДГК, четвертый блок вычитания и четвертый сумматор, причем первые входы четвертого блока вычитания и четвертого сумматора соединены с выходами соответственно пятого и шестого модуляторов, второй вход четвертого блока вычитания подключен к выходу седьмого модулятора, второй вход четвертого сумматора подключен к выходу восьмого модулятора, первый и второй усилители, причем вход первого усилителя подключен к выходу четвертого блока вычитания, а выход - ко второму входу первого блока вычитания, вход второго усилителя подключен к выходу четвертого сумматора, а выход - ко второму входу второго блока вычитания, источник стабилизированного разнополярного напряжения, первый выход которого подключен к первому входу ДГК, а второй выход подключен ко второму входу ДГК.
Передаточную функцию предлагаемого устройства формирования команд управления можно представить в комплексном виде

где WРП(p) - передаточная функция рулевого привода;
ω0 - частота вращения ракеты по крену;
р=d/dt - оператор дифференцирования;
Ку - коэффициент передачи цепи на участке ПОС - усилитель.
Назначая коэффициент передачи Ку равным 10...15, так что mod(WРП(р-jω0)(Ку)>>1, получим
откуда видно, что фазовая частотная характеристика устройства на нулевой частоте входного сигнала будет равна
ϕ(j0)=argWУФК(j0)=0,
т.е. устройство не имеет фазового сдвига независимо от изменения частоты вращения ракеты по крену.
Отсутствие фазового запаздывания устройства при изменении частоты вращения ракеты по крену объясняется тем, что в устройстве производится сравнение входных сигналов - команд управления в измерительной невращающейся системе координат с сигналами, представляющими собой результат отработки сигналов РП, который внес соответствующие искажения по фазе и амплитуде, полученные путем разложения вращающегося выходного вектора команд на составляющие в невращающейся системе координат.
Результат сравнения используется для такого изменения входных сигналов РП, которое обеспечивало бы минимальное рассогласование между входными сигналами устройства и составляющими выходного вектора команд.
Таким образом, предлагаемое устройство формирования команд управления представляет собой двухканальную систему управления, которая не требует фазирования каналов управления при изменении частоты вращения ракеты по крену, на которой РП работает как на несущей, благодаря автоматическому слежению корректирующего устройства, охватывающего РП обратной связью, за частотой вращения ракеты по крену, изменяющейся в широком диапазоне.
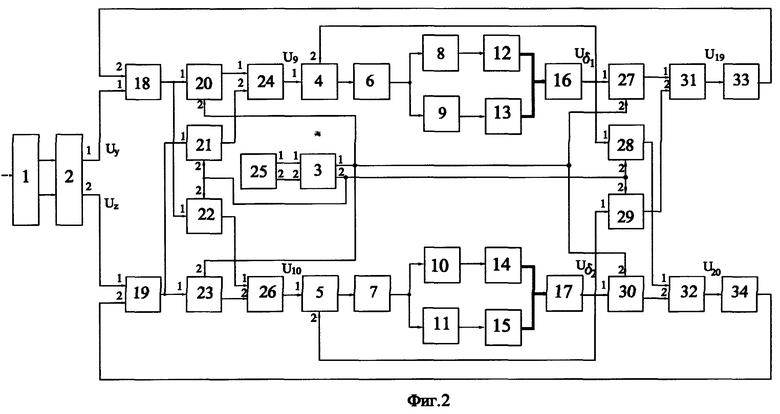
Схема устройства формирования команд управления приведена на фиг.2. Устройство включает ПИ 1, БАЭ 2, первый РП, содержащий первый сумматор 4, триггерное устройство 6, усилители мощности 8, 9, рулевые машинки 12, 13, ПОС 16, второй РП, содержащий второй сумматор 5, триггерное устройство 7, усилители мощности 10, 11, рулевые машинки 14, 15, ПОС 17, кроме этого, устройство включает первый и второй блоки вычитания 18, 19, модуляторы 20, 21, 22, 23, 27, 28, 29, 30, третий сумматор 24, третий блок вычитания 26, четвертый блок вычитания 31, четвертый сумматор 32, первый и второй усилители 33, 34, ДГК 3, источник стабилизированного напряжения 25.
ПИ состоит из следующих структурных единиц: линзы, светофильтра, фотодиода, усилителя (см. стр.41 [2]).
БАЭ состоит из усилителя-ограничителя, регулируемого усилителя со схемой автоматической регулировки усиления, порогового устройства, четырех избирательных фильтров, четырех компараторов, четырех нормирующих устройств, двух схем выделения координат, двух корректирующих фильтров, двух усилителей. Связи между структурными единицами БАЭ показаны на рис. 11, стр.18 [2].
Каждый РП состоит из усилителя, двух рулевых машинок и ПОС. В свою очередь, усилитель состоит из двух идентичных каналов, в состав которых входят суммирующее устройство, корректирующий фильтр, триггерное устройство и два противофазных усилителя мощности, нагрузками которых являются обмотки управляющих электромагнитов рулевых машинок.
Каждая из рулевых машинок состоит из управляющего электромагнита, распределительного устройства и цилиндра (см. стр.20-24 [2]).
Принципиальная электрическая схема ДГК приведена на рис.12, стр.19 [2].
Сумматоры и блоки вычитания выполнены по схеме рис.11.1, стр.137 [3].
Модуляторы выполнены по схеме четырехквадратного умножения (см. рис.11.41, стр.162 [3]).
Усилители выполнены по схеме рис.13.11 стр.202 [3].
Источник стабилизированного напряжения выполнен по схеме рис.3.12 стр.102 [4].
Поступающий в ПИ оптический сигнал, содержащий информацию об отклонении ракеты от оси информационного поля, преобразуется в электрические сигналы, которые поступают на входы БАЭ.
БАЭ осуществляет преобразование сигналов с целью выделения постоянных составляющих напряжений, пропорциональных величинам отклонений ракеты от центра поля по каждому каналу управления.
Далее осуществляется преобразование команд управления из системы координат наземной аппаратуры управления во вращающуюся с ракетой систему координат посредством модуляторов 20, 21, 22, 23 вместе с сумматором 24 и блоком вычитания 26 в соответствии с формулами
U24=Uу·с(γ+γ0)+Uz·s(γ+γ0),
U26=Uz·c(γ+γ0)-Uу·s(γ+γ0),
где с(γ+γ0), s(γ+γ0) - функции текущего угла крена ракеты;
γ - текущий угол крена ракеты;
γ0 - начальный угол фазирования.
С выходов сумматора 24 и блока вычитания 26 сигналы поступают на входы двух РП, которые отрабатывают их и формируют вектор управляющих сил, под действием которых ракета изменяет свое угловое положение на траектории и в результате движется в сторону уменьшения отклонений от оси поля управления.
На выходах ПОС формируется информация об отклонениях рулей, используемая не только для получения автоколебаний в контуре каждого РП, но и для организации обратной связи по огибающей выходных сигналов РП.
Модуляторы 27, 28, 29, 30 вместе с блоком вычитания 31 и сумматором 32 осуществляют преобразование огибающей выходного сигнала РП из вращающейся связанной с ракетой системы координат в невращающуюся систему координат, связанную с наземной аппаратурой управления в соответствии с формулами
U31=Uδ1·с(γ+γ0)-Uδ2·s(γ+γ0),
U32=Uδ2·с(γ+γ0)+Uδ1·s(γ+γ0),
где Uδ1, Uδ2 - сигналы с выходов потенциометров обратной связи первого и второго РП.
На блоках вычитания 18, 19 осуществляется сравнение сигналов координат ракеты с сигналами с выходов усилителей 33 и 34.
Отметим, что ДГК подключен иначе по сравнению со схемой прототипа в связи с тем, что опорный сигнал ДГК необходимо модулировать не только сигналами координат ракеты, как в прототипе, но и сигналами с выходов потенциометров обратной связи РП для преобразования этих сигналов из системы координат, связанной с вращающейся ракетой, в измерительную систему координат НАУ.
Отличие схем подключения ДГК состоит в том, что в прототипе входы ДГК запитаны переменными сигналами координат ракеты, а в предлагаемой схеме на входы ДГК подключены постоянные разнополярные напряжения ±U.
На выходах ДГК формируются опорные сигналы с(γ+γ0), s(γ+γ0), изменяющиеся на частоте вращения ракеты по крену и сдвинутые между собой по фазе на 90°, которые поступают на опорные входы модуляторов.
Следует отметить такое новое положительное качество по сравнению с известным устройством, как повышение надежности устройства. Это объясняется тем, что при отказе одного из каналов устройства другой канал обеспечивает функционирование устройства практически без изменения коэффициента передачи и фазового сдвига.
Для проверки предлагаемого устройства было проведено моделирование динамики контура управления ракеты с этим устройством, результаты которого показали высокую эффективность предлагаемого устройства и его преимущество перед известными.
Источники информации
1. ПТУРС 9М111М. Техническое описание и инструкция по эксплуатации 9М111М.00.00.000 ТО, М., Военное издательство, 1983 г. - аналог.
2. Выстрел 3УБК10 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации 3УБК 10.00.00.000 ТО, М., Военное издательство, 1987 г. - прототип.
3. У. Титце, К. Шенк. Полупроводниковая схемотехника. - М.: Мир, 1982 г.
4. Дж. Ленк. Электронные схемы. - М.: Мир, 1985 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ЕГО РЕАЛИЗУЮЩАЯ | 2013 |
|
RU2549615C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
Изобретение относится к оборонной технике и может быть использовано в комплексах танкового и противотанкового вооружения, а также в малогабаритных зенитных комплексах. Задачей предлагаемого изобретения является повышение точности наведения ракеты на цель при отклонениях частоты вращения ракеты по крену относительно номинальной величины и разбросе динамических характеристик рулевого привода за счет корректировки фазы входных сигналов рулевого привода. Это достигается тем, что в устройство формирования команд, содержащее последовательно соединенные приемник излучения, блок аппаратуры электронной, гироскопический координатор с датчиком угла крена, первый рулевой привод с первым сумматором и первым потенциометром обратной связи, второй рулевой привод со вторым сумматором и вторым потенциометром обратной связи, введены первый и второй блоки вычитания, первые входы которых соединены соответственно с первым и вторым выходами блока аппаратуры электронной, первый, второй, третий и четвертый модуляторы, причем сигнальные входы первого и третьего модуляторов соединены с выходом первого блока вычитания, а сигнальные входы второго и четвертого модуляторов соединены с выходом второго блока вычитания, третий сумматор и третий блок вычитания, причем первый вход третьего сумматора соединен с выходом первого модулятора, второй вход третьего сумматора соединен с выходом второго модулятора, а выход третьего сумматора соединен со входом первого рулевого привода, первый вход третьего блока вычитания соединен с выходом третьего модулятора, второй вход третьего блока вычитания соединен с выходом четвертого модулятора, выход третьего блока вычитания соединен со входом второго рулевого привода, пятый, шестой, седьмой и восьмой модуляторы, причем сигнальные входы пятого и шестого модуляторов соединены с выходом потенциометра обратной связи первого рулевого привода, а сигнальные входы седьмого и восьмого модуляторов соединены с выходом потенциометра обратной связи второго рулевого привода, опорные входы первого, четвертого, пятого и восьмого модуляторов подключены к первому выходу датчика гирокоординатора, опорные входы второго, третьего, шестого и седьмого модуляторов подключены ко второму выходу датчика гирокоординатора, четвертый блок вычитания и четвертый сумматор, причем первые входы четвертого блока вычитания и четвертого сумматора соединены с выходами соответственно пятого и шестого модуляторов, второй вход четвертого блока вычитания подключен к выходу седьмого модулятора, второй вход четвертого сумматора подключен к выходу восьмого модулятора, первый и второй усилители, причем вход первого усилителя подключен к выходу четвертого блока вычитания, а выход - ко второму входу первого блока вычитания, вход второго усилителя подключен к выходу четвертого сумматора, а выход - ко второму входу второго блока вычитания, источник стабилизированного разнополярного напряжения, первый выход которого подключен к первому входу датчика гирокоординатора, а второй выход подключен ко второму входу датчика гирокоординатора. 2 ил.
Устройство формирования команд управления вращающейся вокруг продольной оси ракетой, содержащее гироскопический координатор с датчиком угла крена, последовательно соединенные приемник излучения, блок аппаратуры электронной, первый рулевой привод с первым сумматором и первым потенциометром обратной связи, второй рулевой привод со вторым сумматором и вторым потенциометром обратной связи, причем выходы потенциометров обратной связи соединены со вторыми входами соответствующих сумматоров, отличающееся тем, что в него введены четыре блока вычитания, восемь модуляторов, третий и четвертый сумматоры, первый и второй усилители и источник стабилизированного напряжения, причем первые входы первого и второго блоков вычитания соединены соответственно с первым и вторым выходами блока аппаратуры электронной, первые входы первого и третьего модуляторов соединены с выходом первого блока вычитания, а первые входы второго и четвертого модуляторов - с выходом второго блока вычитания, выход первого модулятора соединен с первым входом третьего сумматора, выход второго модулятора - со вторым входом третьего сумматора, выход которого соединен с первым входом первого сумматора первого рулевого привода, выход третьего модулятора соединен с первым входом третьего блока вычитания, а выход четвертого - со вторым входом третьего блока вычитания, выход которого соединен с первым входом второго сумматора второго рулевого привода, выход первого потенциометра обратной связи первого рулевого привода соединен с первыми входами пятого и шестого модуляторов, выход второго потенциометра обратной связи второго рулевого привода соединен с первыми входами седьмого и восьмого модуляторов, выход пятого модулятора соединен с первым входом четвертого блока вычитания, выход седьмого модулятора соединен со вторым входом четвертого блока вычитания, выход которого соединен со входом первого усилителя, выход первого усилителя соединен со вторым входом первого блока вычитания, выход шестого модулятора соединен с первым входом четвертого сумматора, выход восьмого модулятора - со вторым входом четвертого сумматора, выход которого соединен со входом второго усилителя, выход второго усилителя соединен со вторым входом второго блока вычитания, первый выход источника стабилизированного напряжения соединен с первым входом датчика гироскопического координатора, второй выход - со вторым входом датчика гироскопического координатора, первый выход которого соединен со вторыми входами первого, четвертого, пятого и восьмого модуляторов, второй выход - со вторыми входами второго, третьего, шестого и седьмого модуляторов.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| - М.: Военное издательство, 1987, с.14-19 | |||
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| US 5042742 A, 27.08.1991 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

