Изобретение относится к области эндоскопов и касается вопросов управления изгибом дистального конца эндоскопа.
Известные конструкции гибких или жестких, имеющих гибкий конец эндоскопов, обычно содержат вводимую часть, расположенную на дистальном конце эндоскопа, изгибаемую часть и размещенное на его проксимальном конце устройство управления изгибом. Изгибаемая часть эндоскопа обычно выполняется в виде гибкой трубки, а устройство управления - в виде ручного или электрического привода, обеспечивающего создание силовых воздействий, передаваемых через тяговые элементы на изгибаемую часть эндоскопа и обеспечивающих ее изгиб в необходимом направлении.
Конструкции приводимых в действие вручную устройств управления изгибом эндоскопа весьма разнообразны и могут быть разделены на две группы: устройства, в которых управление изгибом конца эндоскопа в любую сторону осуществляется одним органом управления, и устройства, в которых управление изгибом осуществляется двумя органами управления. В качестве примера устройств первой группы могут быть названы устройства [1-3].
Все принадлежащие к этой группе устройства управления изгибом эндоскопа обладают одним общим недостатком - они обеспечивают только одну независимую степень свободы перемещения дистального конца эндоскопа. Другими словами, устройства управления изгибом эндоскопа первой группы могут обеспечить только такое управление изгибом эндоскопа, при котором его дистальный конец перемещается по окружности, лежащей в плоскости, ортогональной оптической оси гибкой части эндоскопа. При этом перемещение дистального конца независимо только в одном из двух лежащих в этой же плоскости ортогональных направлений оказывается невозможным.
От указанного недостатка свободны устройства управления второй группы. Эти устройства обеспечивают изгиб дистального конца эндоскопа поочередно и взаимно независимо в двух ортогональных направлениях. Подобные конструкции предложены, например, в ряде патентов Японии и Германии [4-6].
Конструкции упомянутой группы устройств управления обычно включают в себя группу натяжных тросов, первые концы которых закреплены внутри полости гибкого дистального конца эндоскопа в точках, лежащих на ортогональных осях поперечного сечения его торца. На оппозитном гибком конце эндоскопа размещен силовой привод управления натяжными тросами. Этот привод выполнен в виде двух установленных на независимых осях барабанов (шкивов) с закрепленными на них своими вторыми концами и намотанными на них натяжными тросами. При использовании ручного привода устройства управления каждый из барабанов жестко связан с соответствующей ручкой управления, установленной снаружи корпуса. Управление изгибом эндоскопа в этом случае осуществляется поворотом одной или обеих ручек одновременно. За счет жесткой связи между ручкой и барабаном поворот ручки на определенный угол приводит к повороту на такой же угол связанного с ней барабана. При этом происходит дополнительное наматывание натяжного троса на барабан. Длина натяжного троса уменьшается, и он подтягивает связанный с ним торец гибкого конца эндоскопа в сторону точки их крепления, результатом чего является изгиб всего дистального конца эндоскопа в эту же сторону. Таким образом, поочередным поворотом ручек конец эндоскопа может быть направлен в любую необходимую сторону, т.е. изогнут на необходимый угол.
Поворот ручек управления, приводящий к перемещению натяжных тросов и, тем самым к изгибу конца эндоскопа, может осуществляться как вручную, так и при использовании электромеханического привода. В последнее время стали известны не только электромеханические, но и пьезоэлектрические и электротермические приводы, например по заявкам Японии [5-6]. В частности, в эндоскопе по заявке Японии [5] перемещение натяжных тросов - тяговых элементов производится электрическим приводом, управляемым от регулятора напряжения, выполняющего функцию единого органа управления изгибом эндоскопа. Последний осуществляет подачу управляющих токов на привод таким образом, что создаваемые этим приводом силовые воздействия передаются через тяговые элементы на дистальный конец гибкой трубки, вызывая ее изгиб и тем самым изгиб конца эндоскопа в любом заданном направлении.
Поскольку по достигаемому результату - числу независимых степеней свободы направлений изгиба конца эндоскопа, единственности используемого органа управления и частной форме реализации гибкого элемента эндоскопа в форме цепочки кольцевидных сочленений настоящее техническое решение совпадает с признаками эндоскопа по заявке Японии [5] последний выбран в качестве прототипа.
Недостатком устройства-прототипа является сложность процедуры практического управления направлением изгиба эндоскопа. Это объясняется тем, что выбранное направление изгиба связано с конкретным распределением усилий в группе тяговых элементов и требует строгого соответствия выбранного пользователем распределения подаваемых на привод управляющих токов.
Технической задачей, на решение которой направлено настоящее изобретение, является упрощение процедуры управления направлением изгиба эндоскопа путем реализации ручного "органолептического" управления таким изгибом с помощью одного управляющего органа.
Сущность заявляемого изобретения заключается в том, что в известном устройстве управления изгибом конца эндоскопа, содержащем силовой привод, связанный размещенными в полости корпуса эндоскопа тяговыми элементами с выполненной в виде гибкой трубки его изгибаемой частью, согласно данному предложению привод выполнен в виде гибкой трубки, первые концы натяжных тросов связаны с дистальным концом изгибаемой части, а вторые - с проксимальным концом привода, при этом образующая привод гибкая трубка выполнена имеющей диаметр, больший диаметра изгибаемой части эндоскопа.
Благодаря указанной выше новой форме выполнения привода достигается возможность управления изгибом путем ручного воздействия только на один орган управления - на сам механизм управления тяговыми элементами. При этом такое воздействие заключается в управляющем изгибе самого привода управления таким образом, как если бы рука пользователя изгибала непосредственно дистальный гибкий конец эндоскопа. Тем самым обеспечивается "органолептический" характер управления изгибом эндоскопа, поскольку за счет передачи указанного управляющего воздействия через тяговые элементы - натяжные тросы, связывающие привод с гибким дистальным концом эндоскопа, обеспечивается "репититорное" воспроизведение управляющего изгиба гибким дистальным концом эндоскопа. Причем в зависимости от принятой в устройстве управления схемы соединения натяжных тросов - при их взаимном расположении в пересекающихся или непересекающихся плоскостях - "репетиторное" воспроизведение изгиба гибкой части эндоскопа может повторять направление управляющего изгиба и лежать с ним в одной плоскости или лежать в ортогональной плоскости, а также быть противоположным по направлению.
В частном случае реализации изобретения образующая привод гибкая трубка выполнена в виде цепочки шарнирно связанных между собой колец.
Такая форма выполнения привода - устройства управления обеспечивает достаточную адекватность передачи управляющих усилий руки на изгибаемую часть эндоскопа.
Сущность заявляемого изобретения поясняется чертежом, где показано устройство управления изгибом конца эндоскопа.
В общем случае эндоскоп с заявляемым устройством содержит выполненную в виде гибкой трубки изгибаемую часть 1, устройство 2 управления изгибом, содержащее натяжные тросы 3 и привод 4. Привод 4 выполнен в виде гибкой трубки, образованной, например, как это указано в частной форме выполнения эндоскопа, группой последовательно установленных соосных и попарно шарнирно связанных между собой в двух ортогональных плоскостях колец. Дистальное по отношению к изгибаемому концу эндоскопа кольцо гибкой трубки привода 4 связано с четырьмя натяжными тросами 3, оппозитные концы которых связаны с дистальным изгибаемым концом гибкой трубки 1.
Работу устройства управления удобно рассмотреть на примерах изгиба эндоскопа поочередно в две взаимноортогональные стороны.
Вначале изгиб эндоскопа производится управляющим изгибом привода 4 в плоскости чертежа. При таком изгибе привода 4 происходит пространственное смещение точек крепления натяжных тросов 3 к этой трубке так, что точка крепления одного из этих тросов удаляется от дистального конца эндоскопа, а другая - приближается к нему. В результате один из связанных с приводом 4 и лежащих в плоскости чертежа натяжных тросов 3 ослабляется, а другой натягивается. Натягивающийся трос 3 подтягивает связанный с ним дистальный конец трубки 1 в сторону своего смещения. Тем самым обеспечивается изгиб дистального конца эндоскопа в соответствующую сторону.
Теперь изгиб конца эндоскопа производится изгибом привода 4 в направлении, перпендикулярном плоскости чертежа и ориентированном на читателя. При этом, как и в первом случае, один из соответствующих натяжных тросов 3 ослабляется, а другой - натягивается, вызывая аналогичный рассмотренному выше изгиб дистального конца трубки 1 эндоскопа.
При изгибе привода 4 в сторону, не совпадающую ни с плоскостью чертежа, ни с перпендикуляром к этой плоскости, работа механизма управления натяжными тросами соответствует одновременной реализации обоих рассмотренных выше случаев. Тем самым обеспечивается возможность управления изгибом эндоскопа одним органом управления в любом направлении.
Выполнение же привода 4 с большим диаметром, чем диаметр трубки 1, позволяет увеличить линейное смещение точки крепления тросов 3 к трубке 1 при ее управляющем изгибе и тем самым увеличить крутизну характеристики управления изгибом дистального конца эндоскопа.
Управление изгибом эндоскопа не зависит от формы выполнения гибких трубок 1 и 4, которые могут быть выполнены как в форме сборок из шарнирно связанных между собой колец (так назывемая "раковая шейка"), так и в иной форме.
Источники информации
1. Заявка Японии 2-6527, кл. А 61 В 1/00, G 02 В 23/24.
2. Заявка ФРГ OS 3522086, кл. А 61 В 1/00.
3. Заявка Франции 2544978, кл. А 61 В 1/00 .
4. Заявка ФРГ 3936696, кл. G 02 В 23/24 .
5 Заявка Японии 59-229530, кл. А 61 В 1/00 (прототип).
6. Заявка Японии 59-215702, кл. А 61 В 1/00 .
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНИЧЕСКИЙ ЭНДОСКОП | 2012 |
|
RU2510522C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБКИМ ДИСТАЛЬНЫМ КОНЦОМ ЭНДОСКОПА | 2009 |
|
RU2391041C1 |
| УКЛАДКА ДЛЯ СТЕРИЛИЗАЦИИ И ТРАНСПОРТИРОВКИ МЕДИЦИНСКОГО ИНСТРУМЕНТАРИЯ | 2006 |
|
RU2308293C1 |
| КОНСТРУКЦИЯ ПОВОРОТНО-ЗВЕНЬЕВОЙ ЦЕПИ ДЛЯ УПРАВЛЯЕМОЙ ДИСТАЛЬНОЙ ЧАСТИ ЭНДОСКОПА | 1996 |
|
RU2112414C1 |
| ГИБКАЯ УПРАВЛЯЕМАЯ ТРУБКА ДЛЯ ЭНДОСКОПА | 1995 |
|
RU2106107C1 |
| ГИБКАЯ УПРАВЛЯЕМАЯ ТРУБКА ДЛЯ ЭНДОСКОПА | 1992 |
|
RU2019123C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ИЗГИБАЮЩИМСЯ УЧАСТКОМ ЭНДОСКОПА | 2009 |
|
RU2517603C2 |
| КРИОЗОНД | 2020 |
|
RU2819009C2 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| ГИБКАЯ УПРАВЛЯЕМАЯ ТРУБКА ДЛЯ ЭНДОСКОПА | 1993 |
|
RU2031622C1 |
Изобретение относится к эндоскопам и касается вопросов управления изгибом дистального конца эндоскопа. Отличительной особенностью устройства является наличие одного органа для управления изгибом дистального конца эндоскопа независимо в двух ортогональных плоскостях. Указанная особенность обеспечивается тем, что механизм управления натяжными тросами выполнен в виде гибкой трубки, диаметр которой превышает диаметр изгибаемого конца эндоскопа. Благодаря такой форме выполнения устройства управление изгибом эндоскопа осуществляется ручным изгибом самого органа управления. В частном случае устройство управления выполнено в виде группы шарнирно связанных между собой колец. Техническим результатом изобретения является увеличение чувствительности устройства к управляющему воздействию, что в целом упрощает процесс управления. 1 з.п. ф-лы, 1 ил.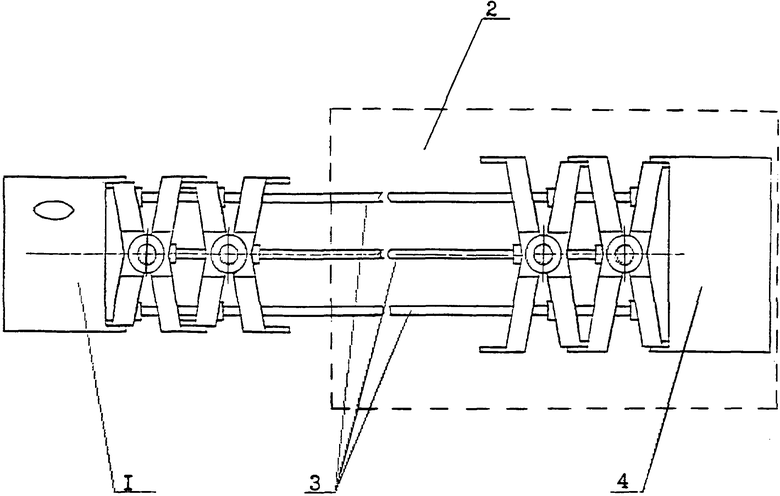
| Гибкая управляемая трубка для эндоскопа | 1982 |
|
SU1099949A1 |
| DE 3709706 A1, 08.10.1987 | |||
| Ветро-водяной двигатель | 1926 |
|
SU11986A1 |
