Изобретение относится к эндоскопу, имеющему дистальный конец, выполненный с возможностью введения в полость тела пациента, подлежащего обследованию, и проксимальный конец, выполненный с возможностью удерживания его пользователем эндоскопа. Эндоскоп дополнительно содержит рукоятку, расположенную на проксимальном конце эндоскопа, вводимый участок, расположенный на дистальном конце рукоятки, изгибающийся участок, расположенный на дистальном конце вводимого участка, и два тросика управления, расположенных между рукояткой и изгибающимся участком, причем упомянутые тросики управления используются для управления изгибанием изгибающегося участка через входы управления, выполненные на рукоятке.
Тип эндоскопа, описанный во вводном параграфе, хорошо известен специалистам в данной области техники и выпускается во многих разных формах и размерах. Поэтому вводный параграф следует истолковывать как можно более широко.
Описание предшествующего уровня техники
Пример такого эндоскопа описан в US 5976075. В этом примере обеспечен очень простой механизм для управления изгибанием изгибающегося участка эндоскопа. Другой пример простого механизма описан в EP 1804639. Еще одним примером является WO 94/10897. В этом примере показано более сложное устройство, которое обеспечивает лучшее управление изгибающимся участком с большим числом степеней свободы. Многие другие примеры могут быть найдены в патентной литературе.
В US 5,626,553 описан эндоскоп, имеющий систему шарнирного сочленения, которая обеспечивает механическое преимущество. Множество тросиков управления, продолжающихся по длине вводимой трубки, надежно прикреплены к дистальной секции вводимой трубки и подвижны в осевом направлении, обеспечивая поворот дистальной секции. Маховички управления шарнирно прикреплены к рукоятке и расположены с возможностью управления ими пользователем во время эндоскопической процедуры. Система шарнирного сочленения выполнена с возможностью обеспечения приблизительно двукратного механического преимущества, так что сила, приложенная к маховичку управления, составляет приблизительно половину от той силы, которая передается на тросик управления для перемещения тросика управления в осевом направлении, обеспечивая тем самым поворот дистальной секцией вводимой трубки.
Необходимо отметить, что настоящее изобретение, как было упомянуто выше, относится к эндоскопам. Однако основным центром внимания заявки является участок рукоятки и механизм внутри участка рукоятки для управления изгибанием изгибающегося участка эндоскопа, то есть механизм для управления перемещением двух тросиков управления. Остальная структура эндоскопа не столь важна для настоящего изобретения, и поэтому остальная структура не будет очень подробно обсуждаться в настоящем описании. Специалисты в данной области техники смогут, однако, увидеть, как предлагаемые рукоятка/механизм управления могут быть интегрированы в эндоскопы разных форм без каких-либо больших затруднений.
Нужно отметить, что в настоящей заявке приводимый в качестве примера эндоскоп является эндоскопом, используемым для оказания помощи в установлении искусственного дыхания для пациентов. В начале процедуры эндотрахеальная трубка надевается на гибкий вводимый участок эндоскопа. После того как эндотрахеальная трубка будет надета на вводимый участок, гибкий вводимый участок вводится в дыхательные пути пациента. Система видеонаблюдения в наконечнике эндоскопа позволяет направлять эндоскоп в нужное место, не причиняя вреда пациенту. Когда эндоскоп окажется на месте, эндотрахеальная трубка может сдвигаться вниз вдоль вводимого участка эндоскопа. Когда эндотрахеальная трубка окажется на месте, эндоскоп может быть вынут, оставив эндотрахеальную трубку на месте в дыхательных путях пациента. Хотя это лишь конкретный вариант реализации, рассматриваемый в этом описании, должно быть понятно, что идеи настоящего описания могут быть применены также ко многим другим типам эндоскопов. Двумя не ограничивающими примерами являются эндоскоп, используемый в хирургии для наблюдения во время хирургической операции, и эндоскоп, используемый в индустрии для инспектирования машинного оборудования или других структур.
Кроме того, эндоскопы могут иметь форму, отличающуюся от той, которая обсуждается в этой заявке. Например, эндоскоп, показанный на чертежах, содержит гибкий вводимый участок. Однако рукоятка/механизм управления согласно настоящему изобретению может также использоваться с эндоскопом, имеющим жесткий вводимый участок и изгибающийся участок, расположенный на конце этого жесткого вводимого участка.
Сущность изобретения
Первым аспектом настоящего изобретения является обеспечение эндоскопа, лучшего по сравнению с эндоскопами предшествующего уровня техники. Конкретно аспектом настоящего изобретения является обеспечение рукоятки/механизма управления эндоскопа, имеющих меньшую стоимость и сложность.
Этот аспект частично обеспечивается эндоскопом, который описан во вводном параграфе и дополнительно содержит по меньшей мере один рычажный элемент, выполненный с возможностью поворота вокруг оси поворота, шкивный элемент, расположенный между проксимальным концом рукоятки и осью поворота рычажного элемента, и в котором два тросика управления прикреплены по меньшей мере к одному рычажному элементу, причем первый из двух упомянутых тросиков управления расположен таким образом, что он продолжается от по меньшей мере одного рычажного элемента по направлению к изгибающемуся участку, а второй из двух упомянутых тросиков управления расположен таким образом, что он продолжается от по меньшей мере одного рычажного элемента по направлению к шкивному элементу, а затем огибает шкивный элемент, после чего продолжается по направлению к изгибающемуся участку. Таким образом, может быть обеспечен простой и эффективный механизм управления.
Следует отметить, что используемый в настоящем описании термин "шкивный элемент" должен пониматься как любой элемент, который позволяет изменять направление гибкого элемента, такого как струна или тросик управления. Им может быть шкив с вращающимся колесиком в качестве опорной поверхности для гибкого элемента, или же им может быть неподвижная поверхность, вокруг которой проходит гибкий элемент. Им может быть также оболочка для тросика, которая изменяет его направление, например, тонкая металлическая или жесткая пластмассовая трубка, изогнутая в U-образную форму, внутри которой пропускается тросик. Примером этого может служить боуденовский трос.
Термин "рычажный элемент", используемый в этом описании, должен пониматься как любой элемент, который позволяет прикладывать силу рычага к элементу. Двумя не ограничивающими примерами являются жесткий стержень, поворачиваемый относительно оси поворота, и цилиндр, поворачиваемый относительно оси поворота, вокруг которого проходит гибкий элемент. Специалисты в данной области техники смогут обеспечить эквивалентные структуры. Кроме того, более одного рычажных элементов могут быть соединены вместе, и каждый тросик управления может быть подведен к другому рычажному элементу.
В одном варианте реализации первый и второй тросики управления могут быть прикреплены по меньшей мере к одному рычажному элементу на одной и той же стороне плоскости, проходящей через ось поворота.
В предпочтительном варианте реализации ось поворота по меньшей мере одного рычажного элемента может располагаться перпендикулярно к продольной оси вводимого участка эндоскопа. При этом перемещение тросиков будет практически выровнено с осью вводимого участка. Следует отметить, что поскольку вводимый участок является гибким, продольная ось вводимого участка может изменяться. Однако для понимания этого параграфа следует использовать продольную ось наиболее проксимальной части вводимого участка.
Для обеспечения того, чтобы тросики управления перемещались в относительно одном и том же направлении и относительно на одно и то же расстояние, угол, образованный между первым вектором, определяемым точкой крепления первого тросика управления к по меньшей мере одному рычажному элементу и осью поворота по меньшей мере одного рычажного элемента, и вторым вектором, определяемым точкой крепления второго тросика управления к по меньшей мере одному рычажному элементу и осью поворота по меньшей мере одного рычажного элемента, должен быть меньше 120°. Чем меньше угол, тем увереннее две точки будут следовать по одному и тому же пути. В другом предпочтительном варианте реализации угол практически равен нулю. Следует отметить, что угол измеряется проецированием векторов на плоскость, которая перпендикулярна к оси поворота.
Кроме того, точки крепления тросиков управления могут быть расположены таким образом, чтобы расстояние от точки крепления первого тросика управления к по меньшей мере одному рычажному элементу до проксимального конца рукоятки и расстояние от точки крепления второго провода управления к по меньшей мере одному рычажному элементу до проксимального конца рукоятки могли бы быть практически одинаковыми.
Для того чтобы управлять рычажным элементом, рукоятка управления может содержать корпус, который содержит отверстие, через которое проходит элемент управления. Элемент управления может быть подсоединен по меньшей мере к одному рычажному элементу. Элемент управления применительно к настоящему описанию должен пониматься как элемент, посредством которого пользователь эндоскопа может управлять движением по меньшей мере одного рычажного элемента. Это может быть, например, движковый регулятор или поворотная ручка. Специалисты в данной области техники смогут обеспечить дополнительные возможности.
В одном варианте реализации отверстие в корпусе может быть выполнено в виде прорези. В этом случае по меньшей мере один рычажный элемент может содержать экранирующий элемент, расположенный на внутренней стороне корпуса рукоятки, который накрывает упомянутую прорезь изнутри корпуса рукоятки. Экранирующий элемент может быть, кроме того, перемещаемым вместе по меньшей мере с одним рычажным элементом. Тем самым достигается приятный внешний вид без каких-либо открытых отверстий в корпусе. Кроме того, экранирующий элемент будет закрывать корпус, что предотвратит попадание посторонних частиц внутрь корпуса. Экранирующий элемент может быть также снабжен уплотнениями, чтобы полностью изолировать отверстие.
В другом варианте реализации рукоятка может содержать пружинный элемент, подсоединенный к по меньшей мере одному рычажному элементу и выполненный с возможностью возвращения по меньшей мере одного рычажного элемента в нейтральное положение. Под нейтральным положением следует понимать положение, в котором изгибающийся участок находится в выпрямленном состоянии, как показано сплошными линиями на фиг.1. Рычажный элемент обычно выполняется с возможностью смещения в любую сторону из этого нейтрального положения.
В предпочтительном варианте реализации рукоятка может дополнительно содержать второй пружинный элемент, и эти первый и второй пружинные элементы расположены по одному на любой стороне плоскости, которая перпендикулярна к оси поворота по меньшей мере одного рычажного элемента. При этом два пружинных элемента смогут создавать сбалансированный крутящий момент на рычажном элементе.
Пружинный элемент может преимущественно выполняться в виде пластинчатой пружины, содержащей по меньшей мере одну пластину.
В конкретном простом варианте реализации пружинный элемент может быть выполнен с возможностью прохождения через ось поворота по меньшей мере одного рычажного элемента.
По меньшей мере один рычажный элемент может к тому же, по меньшей мере частично, поддерживаться в рукоятке посредством оси, расположенной коаксиально с осью поворота по меньшей мере одного рычажного элемента и поддерживаемой опорным элементом, расположенным в рукоятке. Эта ось может быть непосредственно соединена с пружинным элементом.
В конкретном варианте реализации рукоятка может содержать две пластинчатые пружины, причем каждая из этих пластинчатых пружин содержит по меньшей мере одну пластину и расположена на любой стороне плоскости, которая перпендикулярна к оси поворота по меньшей мере одного рычажного элемента, упомянутые пластинчатые пружины выполнены с возможностью прохождения через ось поворота по меньшей мере одного рычажного элемента, а упомянутый по меньшей мере один рычажный элемент подсоединен к пластинчатым пружинам в середине пластинчатых пружин, при этом концы пластинчатых пружин прочно закреплены внутри рукоятки.
Концы пластинчатых пружин могут, кроме того, зажиматься между верхним накрывающим участком корпуса рукоятки и нижним накрывающим участком корпуса рукоятки. Это обеспечит простую процедуру сборки.
В предпочтительном варианте реализации тросики управления могут быть частью двух боуденовских тросов в сборе, и концы оболочек боуденовских тросов могут регулируемо укладываться внутри рукоятки эндоскопа. При этом тросики управления могут более гибко располагаться в рукоятке, и натяжение тросиков управления может легко регулироваться.
Следует подчеркнуть, что термин "содержит/содержащий, состоящий из", используемый в настоящей заявке, используется для определения наличия заявленных признаков, чисел, этапов или компонентов, но не отрицает наличия или добавления одного или более других признаков, чисел, этапов, компонентов или их групп. Например, в водном параграфе отмечено, что эндоскоп содержит два тросика управления. Однако это должно также включать в себя любое дополнительное число тросиков управления.
Краткое описание чертежей
Далее изобретение будет описано более подробно со ссылкой на варианты реализации, представленные прилагаемыми чертежами. Следует подчеркнуть, что представленные варианты реализации служат только в качестве примера и не должны использоваться для ограничения объема изобретения.
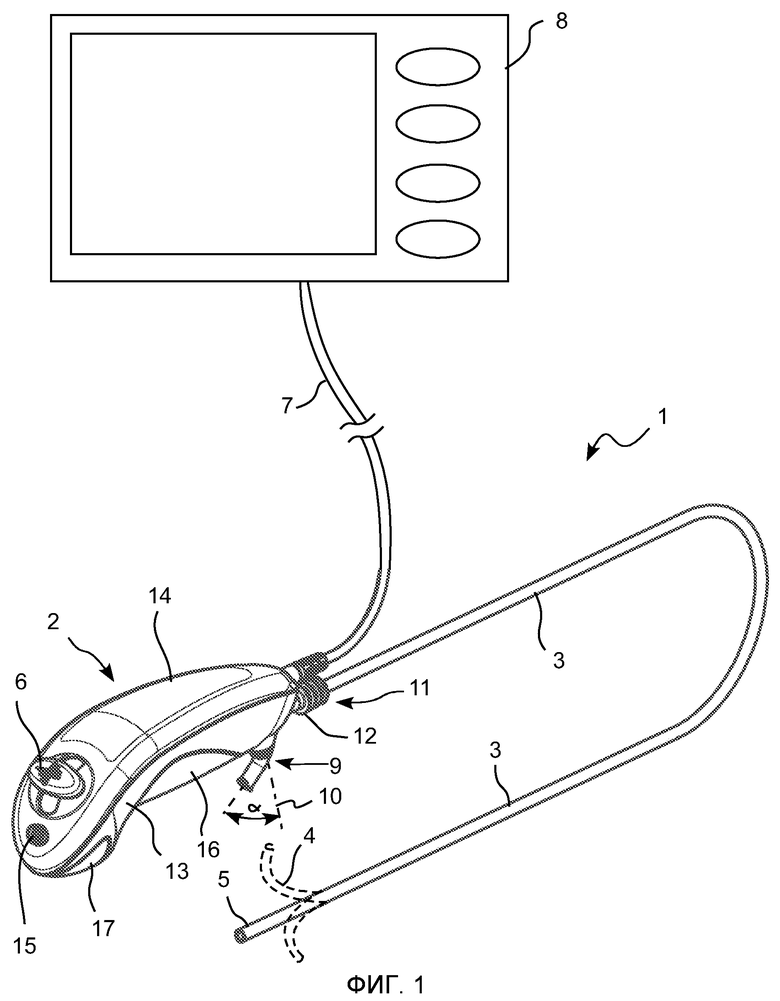
Фиг.1 - вид в перспективе эндоскопа в сборе согласно изобретению со схематичным изображением поддерживающего оборудования.
Фиг.2 - более подробный вид в перспективе рукоятки эндоскопа согласно фиг.1 при снятом верхнем накрывающем участке корпуса.
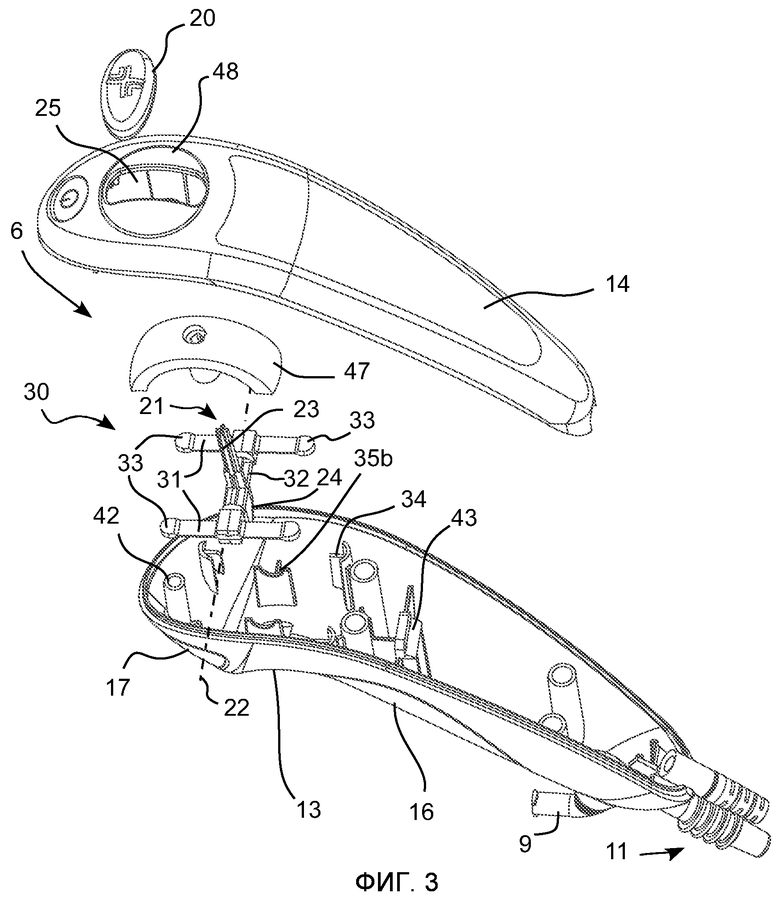
Фиг.3 - укрупненный вид в перспективе рукоятки эндоскопа, показанного на фиг.1.
Фиг.4 - сечение рукоятки эндоскопа согласно фиг.1, представляющее путь прохождения тросиков управления.
Фиг.5 - то же сечение, что и на фиг.4, но без тросиков управления, однако представляющее инъекционную трубку и электрический сигнальный провод.
Подробное описание вариантов выполнения
Эндоскоп 1, изображенный на фиг.1, содержит рукоятку 2 управления, гибкий вводимый участок 3, изгибающийся участок 4 и жесткий наконечник 5. Рукоятка управления содержит элемент 6 управления, расположенный на внешней стороне корпуса рукоятки. Элемент управления в настоящем варианте реализации имеет форму джойстика 6, который подсоединен к изгибающемуся участку 4 боуденовскими тросами (не показаны на фиг.1), расположенными частично внутри рукоятки управления, гибкого вводимого участка и изгибающегося участка. Когда джойстик смещается, изгибающийся участок изгибается, как показано пунктирными линиями на фиг.1.
Рукоятка управления дополнительно содержит электрический кабель 7, который используется для подсоединения эндоскопа к модулю 8 управления. В настоящем варианте реализации модуль управления содержит источник питания и видеомонитор. Рукоятка управления также содержит инъекционный порт 9, который сообщается с отверстием (не показано) на дистальном конце жесткого наконечника эндоскопа через гибкую трубку (или рабочий канал), расположенную частично внутри рукоятки управления, гибкого вводимого участка и изгибающегося участка. Инъекционный порт 9 может быть использован для введения в эндоскоп текучих сред, которые будут распыляться через отверстие в наконечнике. Это может быть, например, вещество для местной анестезии или ему подобное.
Гибкий вводимый участок 3 выполнен в виде полой трубки, которая является гибкой и сгибаемой относительно направлений, перпендикулярных к продольной оси вводимого участка. Однако гибкий вводимый участок является жестким в крутильном направлении и в продольном направлении. Поэтому поворот рукоятки управления передается непосредственно на наконечник и позволяет пользователю эндоскопа управлять поворотным положением наконечника эндоскопа, поворачивая рукоятку управления. Камера и источник света (не показаны) расположены в жестком наконечнике 5 эндоскопа. Электрические сигналы от камеры и от источника питания к камере и к источнику света передаются по проводам (не показаны), частично расположенным внутри рукоятки управления, гибкого вводимого участка и изгибающегося участка эндоскопа. Электрические сигналы передаются от жесткого наконечника к рукоятке управления, где затем они далее передаются в модуль управления для воспроизведения на видеомониторе.
Следует отметить, что эндоскопы, содержащие упомянутые выше признаки, очень хорошо известны специалистам в данной области техники, и дополнительные подробности не требуются специалистам в данной области техники для понимания и реализации настоящего изобретения. Главное изобретение, описываемое в настоящей заявке, направлено на механизм в рукоятке управления, используемый для управления изгибанием изгибающегося участка. Настоящее описание будет поэтому сосредоточено на этом изобретении.
Однако на фиг.1 показаны два признака, которые не относятся непосредственно к главному изобретению и которые отличаются от эндоскопов предыдущего уровня техники. Эти признаки описаны в контексте настоящего изобретения, но специалистам в данной области техники будет ясно, что эти два признака могут стать предметом двух отдельных выделенных заявок.
Первый признак относится к инъекционному порту 9. В настоящем варианте реализации инъекционный порт 9 выполнен в виде вертлюга, который способен поворачиваться относительно оси 10 поворота. В настоящем варианте реализации ось поворота расположена в плоскости, которая параллельна плоскости симметрии рукоятки управления. Однако ось поворота может также располагаться вдоль другой плоскости в другом варианте реализации. Кроме того, соединительная часть инъекционного порта выступает под углом α от 10 до 90º по отношению к оси поворота. Располагая соединительную часть инъекционного порта под углом к оси поворота, становится возможным поворачивать соединительную часть таким образом, что она будет обращена к любой стороне рукоятки. При этом помощнику будет легче помогать пользователю эндоскопа, когда потребуется что-то ввести в инъекционный порт. В эндоскопах предшествующего уровня техники инъекционные порты обычно располагались, выступая вперед из рукоятки управления в фиксированном направлении. В отличие от этого инъекционный порт по настоящему изобретению может поворачиваться по направлению к помощнику пользователя. Детали вертлюга можно лучше увидеть на фиг.4.
Как показано на фиг.5, гибкая трубка или рабочий канал 50, который подсоединен к инъекционному порту, выполнен в виде петли внутри рукоятки. При этом участок трубки, подсоединенный к инъекционному порту, может прикрепляться к инъекционному порту, и петля нейтрализует поворот трубки вследствие поворота инъекционного порта. Для того чтобы не напрягать трубку слишком сильно, инъекционный порт может быть выполнен таким образом, чтобы он мог поворачиваться только на определенный угол в любом направлении, например, приблизительно на 90° в любом направлении. Вариант реализации, в котором перемещение ограничивается углом приблизительно в 60° в любом направлении, может быть также представлен.
Второй признак относится к крепежному устройству 11 для прикрепления эндотрахеальной трубки к концу рукоятки эндоскопа при введении эндоскопа в дыхательные пути пациента. Крепежное устройство расположено на проксимальном конце вводимого участка (и/или на дистальном конце рукоятки). Крепежное устройство содержит по меньшей мере одно гибкое кольцо 12, расположенное вокруг наружного диаметра вводимого участка. В этом конкретном варианте реализации крепежное устройство содержит четыре гибких кольца 12, но возможно любое другое число колец. Кольца 12 изготавливаются из подходящего гибкого материала, например, из резины. Кольца коаксиальны с осью вводимого участка на проксимальном конце вводимого участка.
Кольца имеют наружный диаметр, который немного больше внутреннего диаметра стандартного соединителя на конце эндотрахеальной трубки. Таким образом, эндотрахеальная трубка (не показана), которая надевается поверх вводимого участка перед введением эндоскопа в дыхательные пути пациента, может проталкиваться в сторону рукоятки, при этом соединитель эндотрахеальной трубки проталкивается в направлении крепежного устройства, и кольца крепежного устройства вдавливаются в отверстие в соединителе благодаря их гибкости. Затем кольца удерживаются на эндотрахеальной трубке силой трения между кольцами и соединителем на эндотрахеальной трубке. Когда эндотрахеальная трубка должна быть освобождена, пользователь может приложить небольшое усилие к эндотрахеальной трубке, чтобы освободить трубку от колец.
Эндотрахеальные трубки выпускаются многих разных размеров, обычно с внутренним диаметром от 2 до 10,5 мм. Для того чтобы использовать эндотрахеальные трубки разных размеров с одним и тем же оборудованием, были разработаны стандартные соединители, которые устанавливаются на конец эндотрахеальной трубки. Наружная поверхность соединителя имеет стандартизованную конусообразную форму с номинальным диаметром 15 мм. Внутренний диаметр соединителя не стандартизован, но в большинстве таких соединителей составляет около 11 мм. Поскольку внутренний диаметр соединителя не стандартизован, существуют небольшие изменения внутреннего диаметра соединителей разных изготовителей. Однако при описываемой здесь конструкции крепежного устройства гибкий характер колец крепежного устройства позволит им изгибаться и работать с большим числом разных размеров.
Следует также отметить, что кольца могут выполняться самым разным образом. Например, кольца в определенном варианте реализации могут выполняться с постепенным сужением в направлении рукоятки управления. При этом может быть повышен эффект заклинивания крепежного устройства. В другом варианте реализации кольца крепежного устройства могут иметь некруговую периферию. Например, кольца могут быть выполнены в звездообразной форме. При этом острия звезды будут удерживаться на внутренней поверхности эндотрахеальной трубки. Использование звездообразной формы позволит кольцам воспринимать большие изменения размеров соединителя, не делая кольца слишком мягкими.
Рукоятка 2 управления дополнительно содержит корпус, который содержит основную часть 13 корпуса и накрывающую часть 14. Кнопка 15 включения/выключения расположена на накрывающей части корпуса. Основная часть корпуса и накрывающая часть изготавливаются из пластмассового материала в процессе литья под давлением в настоящем варианте реализации. Основная часть корпуса дополнительно содержит две зоны 16, 17, которые покрыты более мягким и более удобным для захватывания материалом, чем остальные части корпуса и накрывающая часть. Таким материалом может быть, например, материал типа резины. Такой тип покрытия известен из электроинструментов, таких как электрическая дрель, и т.п., и обеспечивает пользователя лучшим и более удобным захватом на рукоятке. Тот же тип покрытия применяется к джойстику 6.
На фиг.2-4 рукоятка показана более подробно, так что можно увидеть внутренние механические детали механизма управления. Следует отметить, что тросики управления не показаны на фиг.2 и 3, но показаны в сечении рукоятки на фиг.4.
Рукоятка 4 содержит механизм 6 джойстика, который содержит перемещаемую кнопку 20, расположенную на наружной стороне корпуса рукоятки управления. Пользователь управляет механизмом джойстика с помощью этой перемещаемой кнопки. В настоящем варианте реализации кнопка выполнена с возможностью перемещения по криволинейному пути, расположенному на плоскости. В настоящем варианте реализации упомянутая плоскость расположена вдоль плоскости симметрии рукоятки. Кнопка подсоединена к рычажному элементу 21. Рычажный элемент выполнен с возможностью поворота относительно оси 22 поворота. Путь перемещения кнопки поэтому определяется размерами рычажного элемента и положением оси 22 поворота. Рычажный элемент имеет первый участок 23, расположенный на первой стороне плоскости, которая проходит через ось поворота, и второй участок 24, расположенный на другой стороне упомянутой плоскости. Первый участок рычажного элемента выполнен таким образом, что он выступает из корпуса через прорезь 25 (см. фиг.4 и 5) наверху накрывающей части корпуса. Кнопка 20 подсоединена к первому участку рычажного элемента.
Рычажный элемент 21 поддерживается внутри корпуса рукоятки посредством подвешивающего механизма 30. Подвешивающий механизм состоит из двух пластинчатых пружин 31. В настоящем варианте реализации каждая пластинчатая пружина содержит одну пластину. В других вариантах реализации пластинчатые пружины могут содержать дополнительные пластины. Две пластинчатые пружины расположены на равном расстоянии по ту и другую стороны плоскости, которая параллельна плоскости симметрии рукоятки. Две пластинчатые пружины подсоединены к рычажному элементу посредством оси 32, которая коаксиальна с осью 22 поворота рычажного элемента. Пластинчатые пружины к тому же располагаются таким образом, что они проходят через ось поворота рычажного элемента. Концы 33 пластинчатых пружин устанавливаются/опираются на стойки 34, накрепко соединенные с корпусом рукоятки управления. Стойки предохраняют концы пластинчатых пружин от перемещения вверх и вниз, но не препятствуют боковому перемещению (в соответствии с ориентацией, показанной на фиг.4).
Ось 32 поддерживается внутри корпуса опорами 35 в рукоятке. Опоры 35 в рукоятке выполнены как два дополняющих друг друга элемента, причем верхний опорный элемент 35а подсоединен к накрывающей части 14 корпуса рукоятки, а нижний опорный элемент 35b подсоединен к основной части 13 корпуса рукоятки. Два дополняющих друг друга элемента 35a, 35b выполнены с двумя полукруглыми отверстиями, которые, соединяясь вместе, образуют полный круг. Во время сборки ось может быть положена в нижний опорный элемент и затем удерживаться на месте верхним опорным элементом, когда накрывающая часть будет установлена на основную часть корпуса. При этом любое перемещение кнопки приведет к повороту рычага относительно оси поворота. Пластинчатые пружины заставляют рычажный элемент возвращаться в центральное/нейтральное положение, когда пользователь отпускает кнопку.
Как можно увидеть на фиг.4, два тросика 40, 41 управления подсоединяются ко второму участку рычажного элемента. Другими словами, тросики управления подсоединяются к рычажному элементу на противоположной стороне плоскости, проходящей через ось поворота, от кнопки 20. Первый тросик 40 управления подсоединяется к концу рычажного элемента и затем проходит вперед по направлению к дистальному концу рукоятки и заканчивается на дистальном конце изгибающегося участка. Заметим, что направление "вперед" должно пониматься как направление от проксимального конца эндоскопа в сторону его дистального конца. Термин "назад" должен пониматься как направление от дистального конца эндоскопа в сторону его проксимального конца. Второй тросик 41 управления подсоединяется к концу рычажного элемента по существу в той же самой позиции, что и первый тросик управления. "Та же самая" означает близость друг к другу, так что перемещение двух точек соединения приблизительно одинаково. От своей точки крепления к рычажному элементу второй провод управления проходит назад и затем оборачивается вокруг столбика 42, расположенного в корпусе. Столбик 42 действует как некий шкивный элемент, позволяя тросику управления изменить направление и затем проходить вперед в корпусе. Как и первый тросик управления, второй тросик управления затем продолжается к дистальному концу изгибающегося участка.
Когда кнопка перемещается в направлении дистального конца рукоятки, рычажный элемент будет поворачиваться в направлении по часовой стрелке (в соответствии с ориентацией рукоятки, показанной на фиг.4), и натяжение будет прикладываться к первому тросику 40 управления, а второй тросик 41 управления будет ослабляться. Когда кнопка перемещается в направлении проксимального конца рукоятки, рычажный элемент будет поворачиваться в направлении против часовой стрелки, и натяжение будет прикладываться ко второму тросику 41 управления, а первый тросик 40 управления будет ослабляться. Во втором случае конец второго тросика 41 управления, который прикреплен к рычажному элементу, будет оттягиваться вперед, то есть в сторону дистального конца рукоятки. Затем второй тросик управления будет передавать это тянущее усилие через столбик 42 в оттягивающее назад усилие на участок второго тросика управления, который расположен между столбиком и дистальным концом изгибающегося участка.
Два провода 40, 41 управления выполнены с возможностью прохождения через отверстия 46 в опорной стойке 43, накрепко закрепленной в корпусе, чтобы управлять путями прохождения тросиков управления. В настоящем варианте реализации, чтобы лучше управлять прохождением тросиков управления, тросики управления выполнены как части боуденовских тросов. Боуденовский трос хорошо известен из других эндоскопических систем и более общо из велосипедных тросовых систем. Боуденовский трос состоит из активной тросовой части, расположенной внутри оболочки. Оболочка выполнена таким образом, чтобы быть относительно несжимаемой в продольном направлении. При этом путь прохождения тросиков управления может контролироваться очень хорошо и допускать их натяжение для изменения направления. Кроме того, оболочки защищают тросики от образования перегибов и уменьшают трение, препятствующее перемещению тросиков управления.
В данном варианте выполнения как оболочка 44 первого тросика 40 управления, так и оболочка 45 второго тросика управления прикреплены на одном конце к опорной стойке 43 в рукоятке, и обе они прикреплены на другом конце к проксимальному концу изгибающегося участка. Опорная стойка 43 к тому же выполнена таким образом, что проксимальные концы оболочек обращены в сторону рычажного элемента и практически по направлению к точке, где тросики управления прикрепляются к рычажному элементу. При этом каждый тросик управления, идущий от рычажного элемента, входит в свою соответствующую оболочку под наилучшим возможным углом, чтобы уменьшить трение. Оболочки затем продолжаются от опорной стойки, плавно изгибаясь, к входу изгибающегося участка. Оболочки продолжаются на всем пути к проксимальному концу изгибающегося участка.
Опорная стойка 43 к тому же выполнена таким образом, чтобы позволить концевым позициям оболочек быть независимо регулируемыми. При регулировании концевой позиции оболочек достигается тот же эффект, как если бы оболочки были удлинены. При этом натяжение тросиков 40, 41 управления может регулироваться. Это может быть сделано, например, обеспечением в опорной стойке двух отверстий 46 с внутренней резьбой и установкой полого винта (не показан) в каждое отверстие. Полый винт должен быть выполнен таким образом, чтобы позволить тросику управления проходить через полый участок винта, но препятствовать прохождению оболочки через винт. Регулируя винт, можно регулировать положение конца оболочки. Такой вид регулировочного механизма известен из велосипедных тросовых систем, например, тросиков тормоза или рычага переключения.
Следует отметить, что на фиг.4 пути прохождения тросиков 40, 41 управления и оболочек 44, 45 тросиков показаны схематически, чтобы показать пути прохождения двух проводов раздельно. В реальном устройстве тросики управления должны располагаться на одной и той же высоте в отверстиях 46 опорной стойки 43 и при этом должны следовать двумя путями, которые располагаются ближе друг к другу, чем показано на чертеже.
Как можно увидеть на фиг.4, механизм джойстика снабжен также экранирующим участком 47. Экранирующий участок прикреплен к рычажному элементу и выполнен из полукруглого элемента, который немного шире, чем прорезь 25 в крышке корпуса рукоятки. Центральная точка полукруглого элемента экранирующего участка расположена коаксиально с осью поворота рычажного элемента. Полукруглый участок также расположен таким образом, что он накрывает прорезь в обеих позициях, когда джойстик нажимается полностью вперед или нажимается полностью назад. Это означает, что экранирующий участок и длиннее и шире, чем прорезь в корпусе. Как можно увидеть на фиг.4, экранирующий участок достаточно большой и должен был бы сталкиваться с тросиками управления, если бы тросики управления были прикреплены к первому участку рычажного элемента. Кроме того, как можно увидеть на фиг 3 и 4, зона 48 верхней накрывающей части 14 корпуса рукоятки вокруг прорези также выполнена с возможностью согласования с кривизной экранирующего участка 47.
Настоящий вариант реализации механизма рукоятки осуществляется в первую очередь выполнением рычажного элемента 21 и оси 22 как единого пластмассового компонента, изготовленного литьем под давлением. Пластинчатые пружины 31, 32 являются отдельными пластмассовыми компонентами, которые изготавливаются литьем под давлением и собираются вместе с концами оси. Согласно чертежам пластинчатые пружины выполнены с участком крепления в середине пластинчатых пружин, которые входят в соответствующие углубления на концах оси. Концы 33 пластинчатых пружин располагаются на стойках 34 в нижней части корпуса, а ось 32 укладывается в нижние опорные элементы 35b. Тросики управления прикрепляются ко второму участку 24 рычажного элемента, и тросики управления укладываются в корпусе. Экранирующий участок 47 затем надвигается на первый участок рычажного элемента, а после этого верхняя часть 14 корпуса рукоятки устанавливается на нижнюю часть. Концы 33 пластинчатых пружин затем удерживаются на месте в корпусе, будучи вставленными между выступами 45 в верхней накрывающей части 14 и стойками 34 в нижней части 13 корпуса рукоятки, а ось удерживается на месте опорными элементами 35а, 35b. Это можно увидеть на фиг.4. Когда крышка находится на месте, кнопка 20 устанавливается на первый участок рычажного элемента. Разные компоненты могут быть приклеены друг к другу, чтобы обеспечить более прочную сборку.
Для того чтобы не усложнять без необходимости фиг.4, гибкая трубка или "рабочий канал", соединяющий инъекционный порт 9 с отверстием (не показано) на дистальном конце эндоскопа, и кабель, соединяющий электронные компоненты камеры в жестком наконечнике эндоскопа с модулем управления, не показаны на фиг.4. Однако на фиг.5 показано, как располагаются трубка 50 и кабель 51, чтобы устранить риск образования перегибов. К тому же следует отметить, что не все компоненты эндоскопа показаны на чертежах. Это сделано, чтобы исключить ненужное усложнение чертежей. Например, печатная плата, содержащая электронные компоненты для эндоскопа, может быть также расположена внутри рукоятки.
Необходимо отметить, что на чертежах и в приведенном выше описании типовые варианты выполнения представлены простым и схематичным образом. Внутренние электронные и механические детали не были показаны, так как специалисты в данной области техники должны быть знакомы с этими деталями, которые без всякой необходимости усложнили бы это описание.
Следует также отметить, что описанные выше варианты реализации представляют лишь небольшое число разных вариантов реализации, которые должны охватываться объемом формулы изобретения. Например, в показанных вариантах реализации тросики управления были непосредственно подсоединены к рычажному элементу. Однако специалистам в данной области техники будет понятно, что тросики управления не должны обязательно непосредственно прикрепляться к рычажному элементу, а могут подсоединяться через соединительный элемент, например, жесткий стержень или подобный элемент. По этой причине формула изобретения не должна без необходимости ограничиваться этими вариантами реализации.
Следует также отметить, что описание конструкции пластинчатых пружин относилось только к варианту реализации, показанному на чертежах, то есть к варианту реализации, в котором тросики управления, прикрепляемые к рычажному элементу, идут в противоположных направлениях в сторону от рычажного элемента. Однако конструкция пластинчатых пружин, соответствующая представленной в настоящем описании, может также использоваться с другими типами рычажных элементов. Например, рассмотрим случай двух цилиндрических рычажных элементов, расположенных по одному с той и другой стороны экранирующего элемента, изображенного на фиг.2 и 3, и коаксиально с осью. Первый тросик управления прикрепляется к первому цилиндрическому рычажному элементу, а второй тросик управления прикрепляется ко второму цилиндрическому рычажному элементу. Второй участок 24 рычажного элемента, показанный на фиг.2-4, может в этом случае быть опущен. Шкивный элемент 42 может быть также опущен. Как будет ясно специалистам в данной области техники, эта конструкция пластинчатой пружины может поэтому быть использована с вариантами реализации, которые не попадают в объем настоящей зарегистрированной формулы изобретения. Поэтому это отдельное изобретение, которое могло бы быть заявлено в выделенной заявке, направленной на этот признак.
Можно также отметить, что рассматриваемые варианты выполнения раскрыли варианты, в которых задающим элементом управления была перемещаемая кнопка. Однако сюда должны быть включены также и другие возможные варианты задающих элементов управления, например, поворотная ручка.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНДОСКОП, ИМЕЮЩИЙ КОРПУС КАМЕРЫ, И СПОСОБ ИЗГОТОВЛЕНИЯ КОРПУСА КАМЕРЫ | 2009 |
|
RU2510234C2 |
| МЕХАНИЧЕСКИЙ ИНТЕРФЕЙС РАЗЪЕМНОГО УПРАВЛЯЕМОГО ЭНДОСКОПА | 2018 |
|
RU2728186C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2666261C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2662277C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| МЕДИЦИНСКИЙ ДИАГНОСТИЧЕСКИЙ ПРИБОР СО СЪЕМНЫМИ ДИСТАЛЬНЫМИ НАСАДКАМИ | 2017 |
|
RU2689843C2 |



Изобретение относится к медицине. Эндоскоп имеет рукоятку, дистальный конец и проксимальный конец. Дистальный конец выполнен с возможностью введения в полость тела пациента, подлежащего обследованию. Проксимальный конец выполнен с возможностью удерживания его пользователем эндоскопа. Рукоятка расположена на проксимальном конце эндоскопа. Вводимый участок расположен на дистальном конце рукоятки. Изгибающийся участок расположен на дистальном конце вводимого участка. Рукоятка содержит по меньшей мере один рычажный элемент, который выполнен с возможностью поворота относительно оси, и шкивный элемент, который расположен между проксимальным концом рукоятки и осью поворота рычажного элемента. Два тросика управления прикрепляются к, по меньшей мере, одному рычажному элементу. В результате эндоскоп имеет простой и эффективный механизм управления. 13 з.п. ф-лы, 5 ил.
1. Эндоскоп (1), который имеет дистальный конец, выполненный с возможностью введения в полость тела пациента, подлежащего обследованию, и проксимальный конец, выполненный с возможностью удерживания его пользователем эндоскопа, причем упомянутый эндоскоп дополнительно содержит:
а) рукоятку (2), расположенную на проксимальном конце эндоскопа,
b) вводимый участок (3), расположенный на дистальном конце рукоятки,
с) изгибающийся участок (4), расположенный на дистальном конце вводимого участка, и
d) два тросика (40, 41) управления, расположенных между рукояткой и изгибающимся участком, причем упомянутые тросики управления используются для управления изгибанием изгибающегося участка через входы управления, выполненные на рукоятке,
при этом рукоятка (2) содержит:
- по меньшей мере один рычажный элемент (21), поддерживаемый внутри корпуса рукоятки (2) и выполненный с возможностью поворота относительно оси (22) поворота,
- шкивный элемент (42), расположенный между проксимальным концом рукоятки и осью поворота рычажного элемента, причем упомянутый шкивный элемент (42) является любым элементом, который позволяет гибкому элементу, такому как струна или тросик управления, изменять направление, например, шкивом с поворотным колесиком в качестве опорной поверхности для гибкого элемента или неподвижной поверхностью, вокруг которой проходит гибкий элемент, и
- при этом два упомянутых тросика управления прикреплены к упомянутому, по меньшей мере одному, рычажному элементу, причем первый из упомянутых тросиков (40) управления расположен таким образом, что он продолжается от указанного по меньшей мере одного рычажного элемента (21) по направлению к изгибающемуся участку (4) и заканчивается на дистальном конце изгибающегося участка (4), а второй из двух упомянутых тросиков (41) управления расположен таким образом, что он продолжается от указанного по меньшей мере одного рычажного элемента (21) по направлению к шкивному элементу (42), затем проходит вокруг шкивного элемента и далее продолжается по направлению к изгибающемуся участку (4),
отличающийся тем, что
второй из двух упомянутых тросиков (41) управления проходит к дистальному концу изгибающегося участка (4), при этом рукоятка (2) содержит перемещаемую кнопку (20), которая расположена на наружной стороне корпуса рукоятки (2) и подсоединена к рычажному элементу (21).
2. Эндоскоп (1) по п.1, отличающийся тем, что первый и второй тросики (40, 41) управления прикреплены к указанному по меньшей мере одному рычажному элементу (21) на одной и той же стороне плоскости, проходящей через ось (22) поворота.
3. Эндоскоп (1) по п.1 или 2, отличающийся тем, что ось (22) поворота указанного по меньшей мере одного рычажного элемента (21) расположена перпендикулярно к продольной оси вводимого участка (3) эндоскопа.
4. Эндоскоп (1) по п.1, отличающийся тем, что угол, образованный между первым вектором, определяемым точкой крепления первого тросика (40) управления к указанному по меньшей мере одному рычажному элементу (21) и осью (22) поворота указанного по меньшей мере одного рычажного элемента, и вторым вектором, определяемым точкой крепления второго тросика (41) управления к указанному по меньшей мере одному рычажному элементу (21) и осью (22) поворота указанного по меньшей мере одного рычажного элемента, меньше 120°, причем упомянутый угол измеряется проецированием векторов на плоскость, которая перпендикулярна к оси поворота.
5. Эндоскоп (1) по п.1, отличающийся тем, что расстояние от точки крепления первого тросика (40) управления к указанному по меньшей мере одному рычажному элементу (21) до проксимального конца рукоятки (2) и расстояние от точки крепления второго тросика (41) управления к указанному по меньшей мере одному рычажному элементу до проксимального конца рукоятки по существу одинаковы.
6. Эндоскоп (1) по п.1, отличающийся тем, что рукоятка (2) содержит корпус (13, 14), который содержит отверстие (25), через которое проходит элемент (20) управления и/или упомянутый, по меньшей мере один, рычажный элемент, причем в первом случае упомянутый элемент управления подсоединяется к указанному по меньшей мере одному рычажному элементу (21).
7. Эндоскоп (1) по п.6, отличающийся тем, что упомянутое отверстие является прорезью (25), и указанный по меньшей мере один рычажный элемент (21) содержит экранирующий элемент (47), расположенный на внутренней стороне корпуса (14) рукоятки (2), который накрывает упомянутую прорезь изнутри корпуса рукоятки, причем упомянутый экранирующий элемент способен перемещаться вместе с указанным по меньшей мере одним рычажным элементом (21).
8. Эндоскоп (1) по п.1, отличающийся тем, что рукоятка (2) содержит пружинный элемент (31), подсоединенный к указанному по меньшей мере одному рычажному элементу (21) и выполненный с возможностью возвращать указанный по меньшей мере один рычажный элемент в нейтральное положение.
9. Эндоскоп (1) по п.8, отличающийся тем, что пружинный элемент (31) имеет форму пластинчатой пружины, содержащей по меньшей мере одну пластину.
10. Эндоскоп (1) по любому из пп.8, 9, отличающийся тем, что пружинный элемент (31) выполнен с возможностью прохождения через ось (22) поворота указанного по меньшей мере одного рычажного элемента (21).
11. Эндоскоп (1) по п.10, отличающийся тем, что указанный по меньшей мере один рычажный элемент (21) по меньшей мере частично поддерживается в рукоятке посредством оси (32), расположенной коаксиально с осью (22) поворота указанного по меньшей мере одного рычажного элемента и поддерживаемой опорным элементом (35а, 35b), расположенным в рукоятке (2), и эта ось соединена с пружинным элементом (31).
12. Эндоскоп (1) по п.1, отличающийся тем, что рукоятка (2) содержит две пластинчатые пружины (31), причем каждая пластинчатая пружина содержит по меньшей мере одну пластину и расположена на любой из сторон плоскости, которая перпендикулярна к оси (22) поворота указанного по меньшей мере одного рычажного элемента (21), и упомянутые пластинчатые пружины выполнены с возможностью прохождения через ось поворота указанного по меньшей мере одного рычажного элемента, и упомянутый, по меньшей мере один, рычажный элемент подсоединен к пластинчатым пружинам в середине пластинчатых пружин, а концы пластинчатых пружин закреплены внутри рукоятки (2).
13. Эндоскоп (1) по п.12, отличающийся тем, что концы (33) пластинчатых пружин (31) вставлены между верхним накрывающим участком (14) корпуса рукоятки и нижним накрывающим участком (13) корпуса рукоятки.
14. Эндоскоп (1) по п.1, отличающийся тем, что тросики (40, 41) управления являются частью двух боуденовских тросов, и концы оболочек (44, 45) боуденовских тросов регулируемо расположены внутри рукоятки (2) эндоскопа.
| US 5626553 A, 06.05.1997 | |||
| US 6236034 B1, 22.05.2001 | |||
| СПОСОБ ПРЕДВАРИТЕЛЬНОЙ ПОДГОТОВКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ ПОЛИСТИРОЛА И СОПОЛИМЕРОВ СТИРОЛА | 0 |
|
SU357274A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБКИМ ЭНДОСКОПОМ | 1972 |
|
SU418173A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИЗГИБОМ КОНЦА ЭНДОСКОПА | 1999 |
|
RU2185083C2 |

