Изобретение относится к медицине и может быть использовано при проведении эндоскопических операций.
Известно устройство управления дистальным концом гибкого эндоскопа, содержащее установленный в корпусе эндоскопа механизм регулировки длины натяжных тросов изгиба эндоскопа в горизонтальной и вертикальной плоскостях соответственно и средство для независимого изменения длины каждого из тросов; средство независимого изменения длины натяжных тросов выполнено содержащим связанные с соответствующим элементом механизма регулировки длины каждого из них, соответственно первый и второй кривошипные механизмы, выполненный в виде установленной на шарнирной шаровой опоре качающейся кулисы и снабженный защитным кожухом рычаг управления, а также шарнирный механизм с двумя степенями свободы, при этом шарнирная шаровая опора рычага управления связана с корпусом, а рычаг управления связан с кривошипными механизмами через шарнирный механизм так, что каждому из них соответствует одна из его степеней свободы; механизм регулировки длины натяжных тросов выполнен в виде двух установленных на независимых осях барабанов, на каждом из которых закреплен один из концов одного из натяжных тросов; первый кривошипный механизм выполнен как кривошипно-ползунный, при этом шатун первого кривошипного механизма является кулисой второго, шарнирный механизм является ползуном обоих шарнирных механизмов и выполнен состоящим из размещенной между верхней и нижней стенками корпуса линейно-перемещающейся вдоль них по направляющим подвижной опоры, связанной с ней через цапфу трубки с проходящим внутри нее шатуном кривошипно-ползунного механизма и с установленной на противоположном конце трубки опорной осью рычага управления, RU 10533 U1.
Основным недостатком этого устройства является отсутствие тормозов в механизме регулировки длины натяжных тросов, что не позволяет обеспечить требуемое положение дистального конца эндоскопа. Кроме того, конструкция довольно сложная и не вполне надежная ввиду наличия качающейся кулисы, шарнирного механизма с двумя степенями свободы, кривошипного механизма и т.п. нестабильных элементов, требующих при этом сложных регулировок.
Известно устройство управления дистальным концом эндоскопа, содержащее силовой привод, связанный с размещенными в полости корпуса эндоскопа натяжными тросами с выполненной в виде гибкой трубки его изгибаемой частью; привод выполнен в виде гибкой трубки, первые концы натяжных тросов связаны с дистальным концом изгибаемой части, а вторые - с проксимальным концом привода, при этом образующая привод гибкая трубка имеет диаметр, больший диаметра изгибаемой части эндоскопа; образующая привод гибкая трубка выполнена в виде цепочки шарнирно связанных между собой колец, RU 2185083 С2.
Данное устройство, так же как и описанное выше, не содержит тормозов для фиксации конца эндоскопа в нужных положениях; кроме того, устройство трудноуправляемо ввиду того, что привод выполнен в виде гибкой трубки, что затрудняет маневрирование дистальным концом эндоскопа, поскольку трубка имеет несколько степеней свободы.
Известно также устройство управления дистальным концом эндоскопа, содержащее корпус, два шкива, установленных на соосных цилиндрических управляющих валах, при этом один вал выполнен полым, а второй вал размещен внутри него. Между валами в средней части имеется воздушный зазор, а по концам валы соприкасаются друг с другом. В каждый из шкивов запасованы тросы, прикрепленные к дистальному концу эндоскопа во взаимно перпендикулярных плоскостях, каждый из валов снабжен ручкой управления и тормозом. Верхний тормоз содержит втулку, расположенную с возможностью вращения на неподвижной оси, сопряженной с нажимным диском посредством шестигранной шайбы. В центре нажимного диска имеется отверстие, в которое вставлена цилиндрическая часть рукоятки управления тормозом. В отверстие цилиндрической части рукоятки входит верхний конец неподвижной оси. Наружная поверхность цилиндрической части рукоятки сопряжена с внутренней поверхностью отверстия в центре нажимного диска посредством резьбы. При повороте рукоятки управления тормозом нажимной диск начинает перемещаться вверх-вниз без вращения и прижимается или отжимается от фрикционного кольца, соединенного с ручкой управления, укрепленной на соответствующем управляющем валу. Нижний тормоз выполнен аналогично. Описанная конструкция тормозов определяет выполнение рукоятки управления одним из тормозов сверху, соосно с ручкой, укрепленной на управляющем валу, при этом рукоятка управления вторым тормозом может быть выполнена сбоку, US 2001/0037051 А1.
Данное техническое решение принято в качестве прототипа настоящего изобретения.
Недостатки прототипа состоят в следующем.
При повороте одного из управляющих валов он трется в верхней и нижней части о поверхность другого направляющего вала. Вследствие этого крутящий момент от одного вала передается частично на другой вал, что может вызвать непредусмотренный и нежелательный поворот последнего, который приведет к произвольному изменению положения дистального конца эндоскопа. Это затрудняет установку дистального конца эндоскопа в нужное положение.
Кроме того, конструкция и кинематическая схема тормозов в устройстве-прототипе не только чрезвычайно сложная, но и обусловливает необходимость размещения рукоятки управления одним из тормозов сверху, соосно с ручкой, укрепленной на управляющем валу. Это делает невозможным одновременное управление и фиксацию дистального конца эндоскопа в плоскости, которой соответствует верхнее расположение одного из тормозов, так как одной рукой невозможно одновременно поворачивать управляющий вал и рукоятку тормоза. Для фиксирования найденного положения дистального конца эндоскопа необходимо оторвать руку от ручки управления, укрепленной на управляющем валу, и взяться за рукоятку тормоза. Однако при этом положение дистального конца, практически, неизбежно собьется; для нахождения требуемого положения, как показывает практика применения подобных устройств, приходится действовать путем многократных последовательных приближений, что крайне затрудняет работу врача и чревато негативными последствиями для больного, особенно при выполнении эндоскопических хирургических операций.
Задачей настоящего изобретения является предотвращение произвольного изменения положения дистального конца эндоскопа при повороте управляющих валов, а также упрощение конструкции и обеспечение возможности поворота управляющего вала и рукоятки тормоза без отрыва руки от ручки управления, укрепленной на управляющем валу, и тем самым повышение точности установки дистального конца эндоскопа в нужное положение.
Согласно изобретению в устройстве для управления гибким дистальным концом эндоскопа, содержащим корпус, два шкива, выполненных заодно с соосными цилиндрическими управляющими валами, при этом один управляющий вал выполнен полым, а другой управляющий вал размещен внутри него, в каждый из шкивов запасованы тросы, прикрепленные к дистальному концу эндоскопа во взаимно перпендикулярных плоскостях, каждый из управляющих валов снабжен ручкой управления и тормозом, между управляющими валами размещена втулка, жестко прикрепленная к корпусу, а тормоза управляющих валов выполнены в виде дисков с двумя оппозитно расположенными вырезами в виде части круга и эксцентриковых валов, один из вырезов каждого диска сопряжен с соответствующим управляющим валом, а другой вырез каждого диска сопряжен с соответствующим эксцентриковым валом, при этом каждый эксцентриковый вал снабжен рукояткой и размещен с возможностью поворота в корпусе.
Заявителем не выявлены технические решения, тождественные заявленному изобретению, что позволяет сделать вывод о его соответствии критерию «новизна».
Реализация отличительных признаков изобретения обусловливает появление у объекта важных новых свойств; размещением между управляющими валами втулки, жестко прикрепленной к корпусу, исключается трение валов друг о друга и, соответственно, передача крутящего момента от одного вала к другому. Это позволяет полностью исключить произвольное изменение положения дистального конца эндоскопа.
Принципиально важными являются также особенности выполнения тормозов. Конструкция тормозов упрощается в несколько раз, при этом обеспечивается возможность управления тормозом без отрыва руки от рукоятки управления дистальным концом эндоскопа; это позволяет исключить сбои положения дистального конца эндоскопа, имеющие место в устройстве-прототипе.
Заявителем не выявлены источники информации, в которых содержались бы сведения о влиянии отличительных признаков изобретения на достигаемый технический результат. Указанное новое свойство объекта обусловливает, по мнению заявителя, его соответствие критерию «изобретательский уровень».
Сущность изобретения поясняется чертежами, где изображено:
на фиг.1 - общий вид эндоскопа в плане;
на фиг.2 - вид сбоку по фиг.1;
на фиг.3 - разрез А-А на фиг.1;
на фиг.4 - разрез Б-Б на фиг.1;
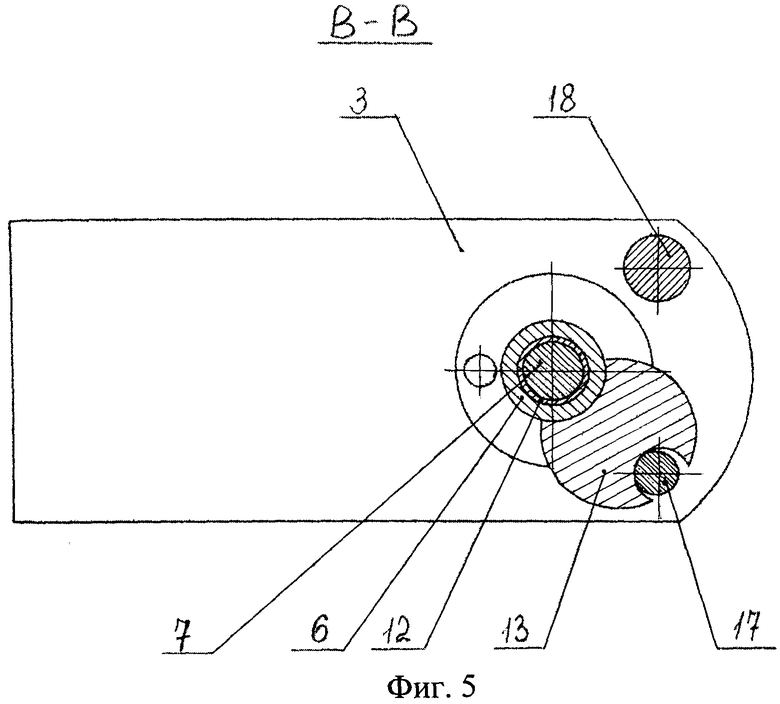
на фиг.5 - разрез В-В на фиг.2;
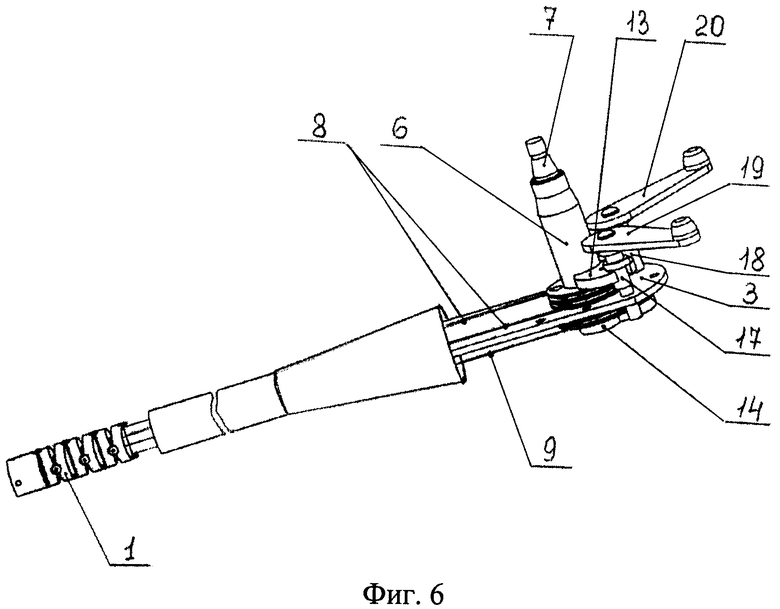
на фиг.6 - устройство в аксонометрии; рукоятки управления
управляющими валами не показаны; дистальный конец открыт;
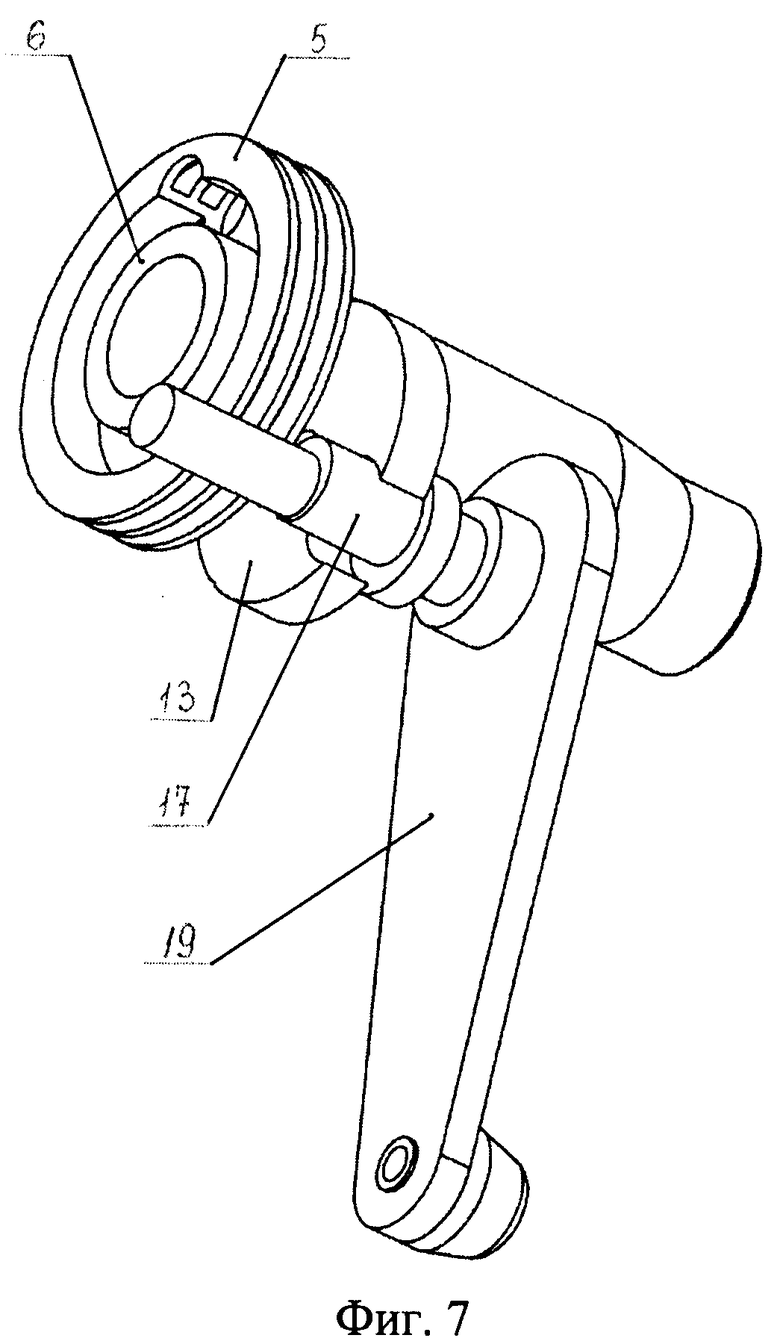
на фиг.7 - узел, включающий полый управляющий вал со шкивом, эксцентриковым валом, диском и рукояткой;
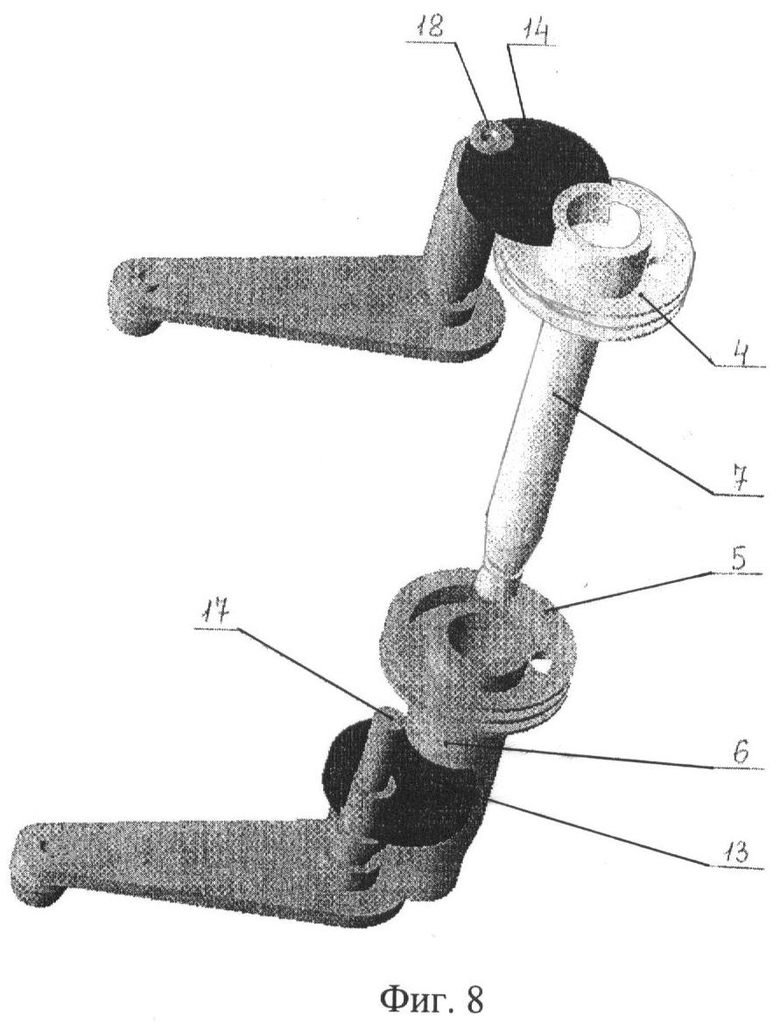
на фиг.8 - схема тормозов в аксонометрии;
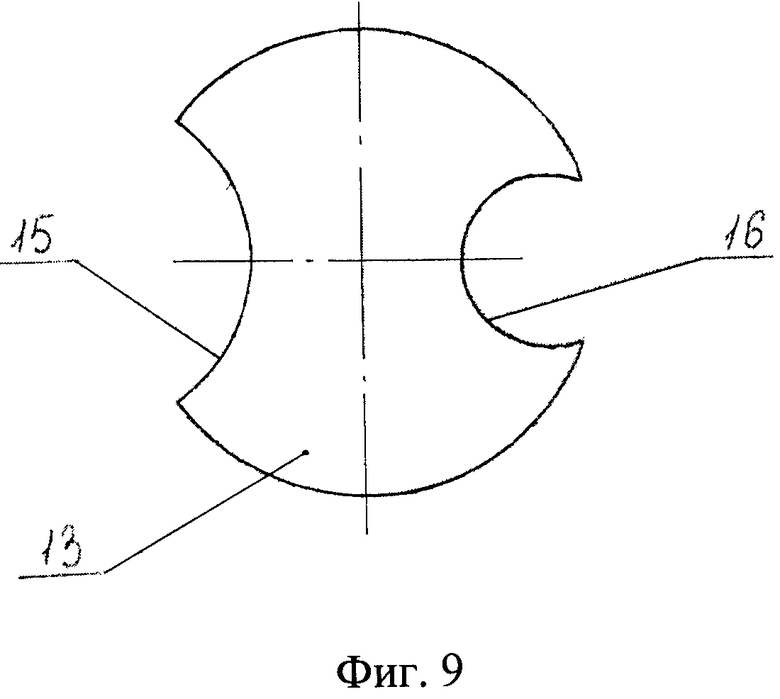
на фиг.9 - диск, вид в плане.
Устройство для управления гибким дистальным концом 1 эндоскопа 2 содержит корпус 3, представляющий собой плату, к которой прикрепляются детали устройства. Шкивы 4 и 5 выполнены заодно с соосными цилиндрическими управляющими валами 6, 7. Наружный управляющий вал 6 выполнен полым, а другой управляющий вал 7 размещен внутри него. В шкив 4 запасован трос 9, а в шкив 5 запасован трос 8.
На фиг.2 ветви троса 8 и ветви троса 9 в местах сопряжения со шкивами 4, 5 расположены в параллельных плоскостях, перпендикулярных плоскости чертежа, а далее в местах прикрепления к гибкому дистальному концу 1 ветви троса 8 перекручиваются на 90° и находятся в плоскости, перпендикулярной плоскости, в которой находятся ветви троса 9. Благодаря этому трос 8 обеспечивает изгиб дистального конца 1 в плоскости чертежа, а трос 9 обеспечивает его изгиб в плоскости, перпендикулярной плоскости чертежа.
Управляющий вал 6 снабжен ручкой 10 управления, управляющий вал 7 снабжен ручкой 11 управления. Каждый из валов 6, 7 снабжен тормозом для фиксации дистального конца 1 в соответствующей плоскости. Между валами 6, 7 размещена втулка 12, которая жестко прикреплена к корпусу 3. Тормоза управляющих валов 6, 7 выполнены в виде дисков 13, 14 из фрикционного материала, в частности, из эбонита, и эксцентриковых валов 17, 18. Каждый из дисков 13, 14 имеет два оппозитно расположенных выреза 15, 16, представляющих собой часть круга (фиг.9); один из вырезов каждого диска сопряжен с соответствующим управляющим валом, а другой вырез сопряжен с соответствующим эксцентриковым валом. Эксцентриковый вал 17, снабжен рукояткой 19, а эксцентриковый вал 18 - рукояткой 20. Эксцентриковые валы 17, 18 размещены с возможностью поворота в корпусе 3. Дистальный конец 1 эндоскопа закрыт оболочкой 21.
Работа устройства осуществляется следующим образом.
Для изгибания дистального конца 1 вверх в плоскости чертежа (фиг.2) поворачивают ручку 10 управления на валу 7 по часовой стрелке, верхняя ветвь троса 8 наматывается на шкив 5 и изгибает дистальный конец 1 вверх, при этом нижняя ветвь троса 8 сматывается со шкива 5.
Для изгибания дистального конца 1 вниз необходимо повернуть ручку 10 против часовой стрелки.
При этом нижняя ветвь троса 8 наматывается на шкив 5, а верхняя ветвь троса 8 сматывается со шкива 5.
Для осуществления фиксации найденного нужного угла изгиба дистального конца 1 поворачивают рукоятку 19 эксцентрикового вала 17, вращательное движение эксцентрикового вала 17 преобразуется в поступательное движение тормозного диска 13, при этом тормозной диск 13, сопряженный с эксцентриковым валом 17 и управляющим валом 6, прижимается к управляющему валу 6, фиксируя его.
Для освобождения дистального конца 1 рукоятку 19 поворачивают в противоположном направлении, управляющий вал 6 освобождается от контакта с диском 13. Изгибание дистального конца 1 в плоскости, перпендикулярной чертежу (фиг.2), осуществляется аналогично, при этом для изгиба дистального конца используется ручка 11 управления, а для фиксации - рукоятка 20.
Во время маневрирования дистальным концом 1 эндоскопа при осуществлении эндоскопических операций поворот рукояток 19, 20 эксцентриковых валов осуществляется без отрыва руки оператора от ручек 10, 11 управления. При этом большой и безымянный палец руки контактирует с ручками 10, 11, а указательный - взаимодействует с рукоятками 19, 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| КАРМАННОЕ СПАСАТЕЛЬНОЕ ТРОСОВОЕ ПОДЪЕМНО-СПУСКНОЕ СРЕДСТВО ПРИ ПОЖАРЕ В НЕБОСКРЕБАХ ЛУКЬЯНОВА С.Н. | 2012 |
|
RU2492885C1 |
| УСТРОЙСТВО ДЛЯ СМАТЫВАНИЯ В БОБИНЫ И РАСКЛАДКИ ГИБКИХ ПОЛИВНЫХ ТРУБОПРОВОДОВ СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ | 2009 |
|
RU2435366C2 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ | 2008 |
|
RU2400391C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2666261C2 |
| МОДУЛЬНАЯ ВИДЕОЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2016 |
|
RU2662277C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИЗГИБОМ КОНЦА ЭНДОСКОПА | 1999 |
|
RU2185083C2 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| КАРМАННОЕ СПАСАТЕЛЬНОЕ ТРОСОВОЕ ПОДЪЕМНО-СПУСКНОЕ СРЕДСТВО ПРИ ПОЖАРЕ В НЕБОСКРЕБАХ ЛУКЬЯНОВА С.Н. | 2009 |
|
RU2413552C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ИЗГИБАЮЩИМСЯ УЧАСТКОМ ЭНДОСКОПА | 2009 |
|
RU2517603C2 |
Изобретение относится к медицине. Устройство содержит корпус, два шкива, установленных на соосных цилиндрических управляющих валах. Один управляющий вал выполнен полым, а второй управляющий вал размещен внутри него. В каждый из шкивов запасованы тросы, прикрепленные к дистальному концу эндоскопа во взаимно перпендикулярных плоскостях. Каждый из управляющих валов снабжен ручкой управления и тормозом. Между управляющими валами размещена втулка, жестко прикрепленная к корпусу. Тормоза управляющих валов выполнены в виде дисков с двумя оппозитно расположенными вырезами в виде части круга. Один из вырезов сопряжен с соответствующим управляющим валом, а второй вырез сопряжен с эксцентриковым валом, снабженным рукояткой и размещенным с возможностью поворота в корпусе. Применение данного устройства позволит предотвратить произвольное изменение положения дистального конца эндоскопа при повороте управляющих валов, упростить конструкцию и повысить точность установки дистального конца эндоскопа в нужное положение. 9 ил.
Устройство для управления дистальным концом эндоскопа, содержащее корпус, два шкива, установленных на соосных цилиндрических управляющих валах, при этом один управляющий вал выполнен полым, а второй управляющий вал размещен внутри него, в каждый из шкивов запасованы тросы, прикрепленные к дистальному концу эндоскопа во взаимно перпендикулярных плоскостях, каждый из управляющих валов снабжен ручкой управления и тормозом, отличающееся тем, что между управляющими валами размещена втулка, жестко прикрепленная к корпусу, а тормоза управляющих валов выполнены в виде дисков с двумя оппозитно расположенными вырезами в виде части круга, один из вырезов сопряжен с соответствующим управляющим валом, а второй вырез сопряжен с эксцентриковым валом, снабженным рукояткой и размещенным с возможностью поворота в корпусе.
| US 2001037051 A1, 01.11.2001 | |||
| УПРАВЛЯЕМОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 2002 |
|
RU2228712C2 |
| ГИБКАЯ УПРАВЛЯЕМАЯ ТРУБКА ДЛЯ ЭНДОСКОПА | 2001 |
|
RU2255645C2 |
| US 7331924 B2, 19.02.2008 | |||
| JP 2001161634 А, 19.06.2001 | |||
| US 5658238, 19.08.1997 | |||
| US 5329887, 19.07.1994 | |||
| JP 4241829 A, 28.08.1992 | |||
| ХАЦЕВИЧ Т.Н | |||
| и др | |||
| Эндоскопы | |||
| Учебное пособие | |||
| - Новосибирск: СГГА, 2002 | |||
| ДРОНОВ А.Ф | |||
| и др | |||
| Эндоскопическая хирургия у детей | |||
| - М.: | |||

