Изобретение относится к автоматическому управлению и может быть использовано для управления диаметром кабелей и проводов на экструзионных линиях.
Известны устройства (Б. К. Никитин. "Особенности синтеза электропривода кабельной линии", журнал "Электротехническая промышленность", Электропривод, 1979 г., вып.8, стр.9-12), в которых осуществляется жесткая стабилизация диаметра провода, кабеля без учета режимов работы электродвигателей экструдера и тяги (кабестана). В этих устройствах контроль за их состоянием осуществляет оператор по показаниям токов электродвигателей экструдера и тяги. Это может привести к их выходу из строя и браку кабеля.
Известны устройства (книга "Электротехнический справочник", т. 3, книга вторая. Энергоатомиздат, М., 1978, стр.69 и 75), в которых защита электродвигателя экструдера и кабестана осуществляется автоматически с помощью датчиков температуры, расположенных в их обмотках. Однако это приводит к отключению системы автоматического управления диаметра кабеля (провода) в любой момент времени, когда температура обмотки электродвигателя стала критической. Это приводит к возникновению брака кабеля как из-за изменения диаметра, так и из-за нестандартной его длины. Таким образом, устройство автоматического управления диаметром оболочки кабеля (провода) и устройство защиты электродвигателей от сгорания в общей системе работают раздельно, а не взаимосвязанно и не подчинены общей цели уменьшения брака, недопустимости сгорания электродвигателей (повышение надежности) и увеличения производительности.
Наиболее близкой по сущности является система автоматического управления диаметром оболочки кабеля (провода), описанная в ав. св. СССР 1118967, "Система регулирования диаметра кабельных изделий", 1984, бюл. 38, МПК 5 G 05 D 5/03).
Эта система содержит канал управления экструдера с блоком регулирования его оборотов, к входу которого подключен задатчик регулирования оборотов, и канал управления кабестаном с блоком регулирования его оборотов, к входу которого подключен задатчик регулирования оборотов, задатчик совместной работы, выход которого соединен с входами задатчиков в каналах управления, и последовательно соединенные датчик диаметра оболочки кабеля (провода) и регулятор диаметра, соединенный с входом блока регулирования оборотов в канале управления экструдера.
У этой системы отсутствует защита электродвигателей от сгорания, связанная с производительностью, что приводит к увеличению брака особенно на длинах, меньших строительной.
Сущностью изобретения является повышение ее надежности и уменьшение брака при оптимальной производительности.
Поставленная задача достигается тем, что в известную систему введены в каждый канал последовательно соединенные датчик температуры, усилитель-ограничитель сигнала, сумматор и регулятор температуры обмотки электродвигателя, причем вторым входом сумматора является заданная температура обмотки электродвигателя канала, к выходу регулятора в канале управления экструдером подключен задатчик совместной работы, а выход регулятора в канале управления кабестаном подключен к второму входу сумматора, к первому входу которого подключен задатчик регулирования оборотов кабестана.
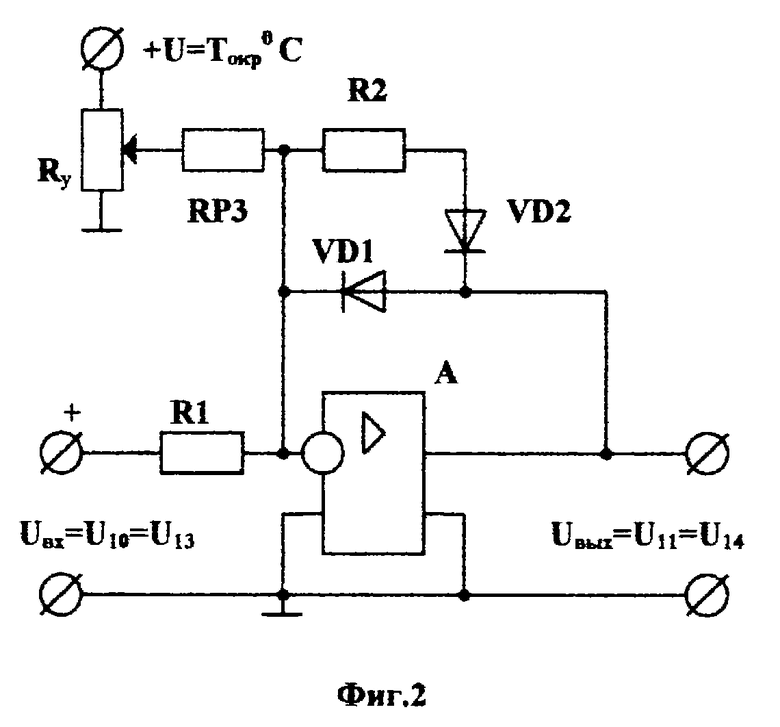
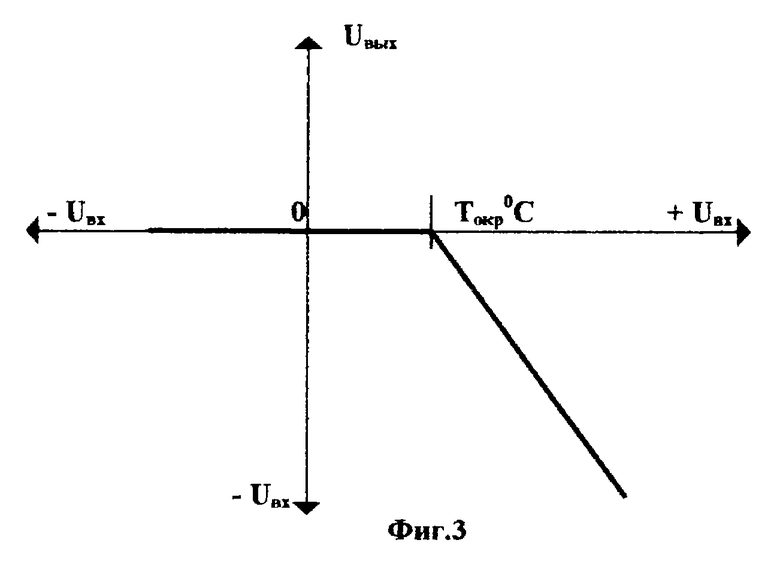
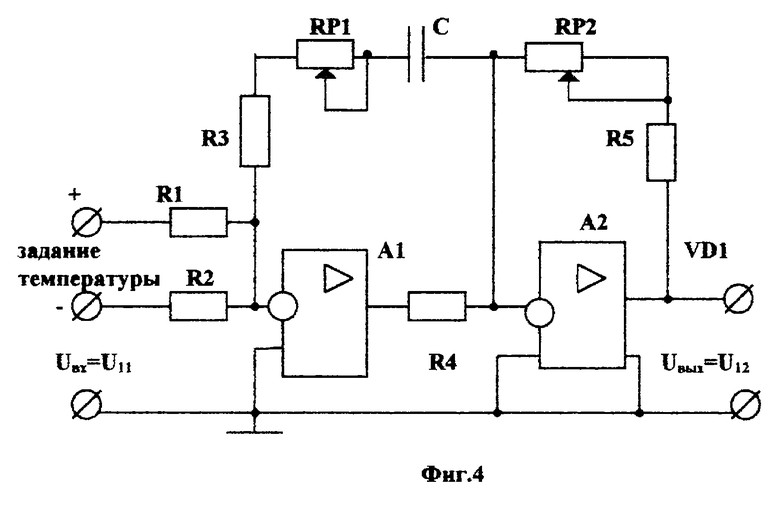
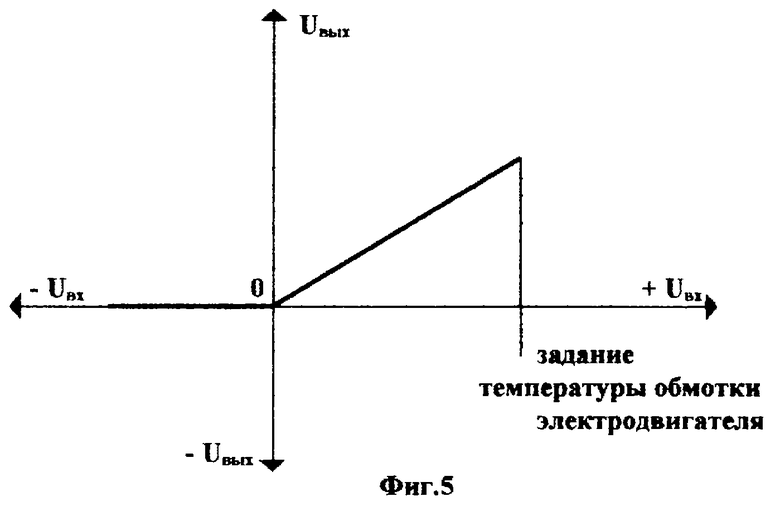
На фиг. 1 приведена блок-схема системы автоматического управления (САУ) диаметром оболочки кабеля (провода) с оптимальной производительностью, на фиг. 2 представлена принципиальная схема усилителя-ограничителя сигнала, на фиг. 3 - его амплитудная характеристика, на фиг.4 - принципиальная схема регулятора 12 температуры обмотки электродвигателя канала управления экструдером, на фиг.5 - его амплитудная характеристика, на фиг.6 - принципиальная схема регулятора 15 температуры обмотки электродвигателя канала управления кабестаном, на фиг.7 - его амплитудная характеристика, на фиг.8 - блок-схема блоков 3 и 6 автоматического регулирования оборотов экструдера и кабестана.
Блок-схема САУ диаметра оболочки кабеля (провода) (фиг.1) с оптимальной производительностью содержит задатчик 1 совместной работы, задатчик 2 регулирования оборотов экструдера, задатчик 3 регулирования оборотов экструдера 4, задатчик 5 регулирования оборотов кабестана 7, блок 6 регулирования оборотов кабестана, датчик 8 диаметра оболочки кабеля (провода), регулятор 9 диаметра, датчик 10 температуры обмотки электродвигателя оборотов экструдера, усилитель-ограничитель 11, регулятор 12 температуры обмотки электродвигателя в блоке регулирования оборотов экструдера, датчик 13 температуры обмотки электродвигателя в блоке регулирования кабестана, усилитель-ограничитель 14, регулятор 15 температуры обмотки электродвигателя оборотов кабестана и сумматоры сигналов 16-20.
Принципиальная схема усилителей-ограничителей 11 и 14 сигнала содержит операционный усилитель А, входной резистор R1, на который подается напряжение Uвх (фиг.2), резистор обратной связи R2, резистор управления Ry напряжением, которое пропорционально температуре окружающей среды, в которой работают электродвигатели экструдера и кабестана, резистор R3 входа напряжения, пропорционального Токр oС, и развязывающие диоды VD1 и VD2. Принцип работы усилителей-ограничителей 11 и 14 объясняется его амплитудной характеристикой, представленной на фиг.3. Из нее видно, что напряжение на выходах усилителей-ограничителей 11 и 14 появляется только тогда, когда напряжение +Uвх превысит значение +Токр, затем усилитель-ограничитель работает как обыкновенный усилитель сигнала постоянного тока. Конструкция таких усилителей-ограничителей сигнала хорошо известна и подробнейшим образом описывается в книге В.Г. Гусев, Ю.М. Гусев. "Электроника", М., Высшая школа, 1991 г., стр. 458, рис.6. 39, в).
Принципиальная схема регулятора 12 температуры обмотки электродвигателя (фиг.4) экструдера содержит операционные усилители А1 и А2, резистор R1 входного сигнала, пропорционального заданию температуры обмотки, резистор R2 входного сигнала, пропорционального напряжению с выхода усилителя-ограничителя 11 в виде сигнала обратной связи, резистор R4 выхода операционного усилителя А1, цепь отрицательной обратной связи на резисторах R3, RP1 и конденсаторе С, которая формирует ПИ-закон регулирования, резисторы RP2 и R5 цепи обратной связи усилителя А2 и развязывающий диод VD1. Регулятор 12 работает следующим образом. Если двигатель экструдера не нагрет, то напряжение с выхода датчика температуры равно 0, равно нулю также и напряжение на выходе усилителя-ограничителя 11, т. е. U11=0. Напряжение на резисторе R1 как Тзад1 oС равно заданному значению температуры обмотки электродвигателя, поэтому усилитель А1 открыт полностью и находится в насыщении. Усилитель А2 используется в качестве инвертора, и на его выходе формируется положительный максимальный сигнал. По мере прогрева двигателя появляется на входе R2 напряжение U11 в виде отрицательной обратной связи, поэтому напряжение на выходе регулятора 12 Uвых=U12 начнет уменьшаться. При достижении U11=Тзад1 напряжение на выходе регулятора 12 будет равно 0, т. е. U12=0. При |U11|>Tзад1 напряжение U12=0, т. к. будет работать диод VD1, не пропускающий отрицательное напряжение на выход регулятора 12. Это описание работы регулятора 12 иллюстрируется его амплитудной характеристикой, приведенной на фиг.5.
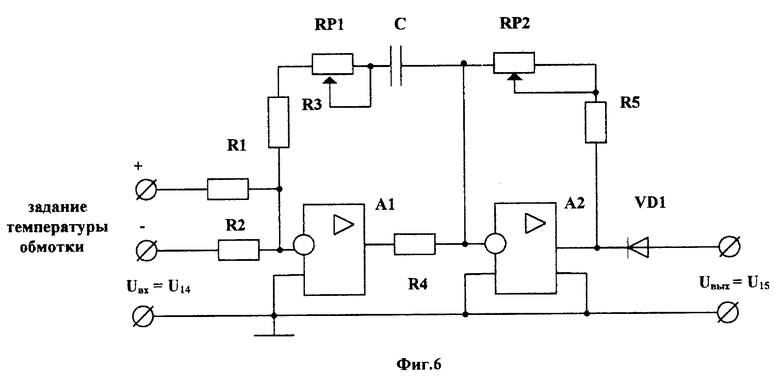
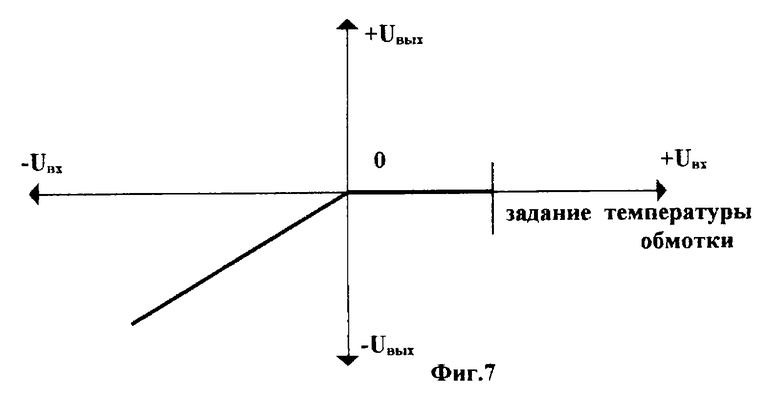
Принципиальная схема регулятора 15 температуры обмотки электродвигателя кабестана содержит аналогичные элементы, как и в регуляторе 12, только развязывающий диод VD1 включен (фиг.6) встречно и не пропускает положительный сигнал на выход регулятора 15. Принцип его работы иллюстрируется амплитудной характеристикой, приведенной на фиг.7. Если двигатель кабестана не нагрет, U14= 0. На выходе Uвых= U15=0, т. к. диод VD1 не пропускает положительное напряжение на выход. Регулятор 15 начинает работать в зоне, когда напряжение |U14|>Tзад2 и на его выходе появляется отрицательное напряжение.
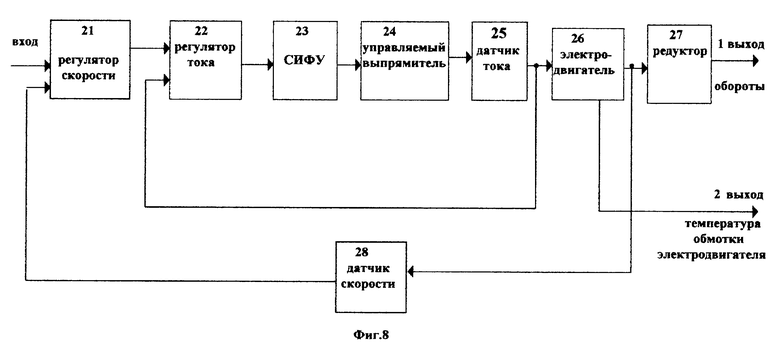
Блок-схема блоков 3 и 6 (фиг.8) регулирования оборотов соответственно экструдера 4 и кабестана 7 содержит регулятор 21 скорости, вход которого является входом блоков, регулятор 22 тока, систему 23 импульсно-фазового управления (СИФУ), управляемый выпрямитель 24, датчик тока 25, электродвигатель 26, второй выход которого является вторым выходом блоков, редуктор 27, выход которого является первым выходом блоков 3 и 6. Эти блоки работают следующим образом. На вход блоков подается напряжение задания оборотов. Стабилизация оборотов осуществляется с помощью датчика 28 скорости и регулятора 21 скорости. Обычно регулятор скорости выполняет ПИ-закон регулирования. Регулирование тока осуществляется с помощью регулятора 22 тока и датчика тока 25. Регулятор тока также выполняется с ПИ-законом регулирования. Напряжение с выхода регулятора 22 тока поступает на вход СИФУ 23. Это устройство предназначено для выработки управляющих импульсов, их сдвига во времени и подачи на управляемый выпрямитель 24, который преобразует переменное напряжение сети в изменяемое напряжение постоянного тока для подачи его на электродвигатель 26 для регулирования и стабилизации его оборотов. Датчик 25 тока представляет собой шунт с усилителем постоянного тока, выход которого и является выходом датчика 25. Редуктор 27 согласует обороты электродвигателей блоков 3 и 6 с механизмами экструдера 4 и кабестана 7. Все элементы блоков 3 и 6 являются стандартными элементами, более подробное описание работы которых приводится, например, в книге В.В. Москаленко. "Электрический привод", М., Высшая школа, 1991, стр. 360, рис.11. 26.
Экструдер 4 предназначен для формирования пластмассовой оболочки на проходящей через его головку медной жиле (кабеле). Экструдер 4 содержит цилиндр, на котором расположены нагреватели его зон. Внутри цилиндра располагается червяк, который вращается двигателем из блока 3 регулирования его оборотов. Экструдер 4 содержит также загрузочный бак, через который подается в цилиндр гранулированная пластмасса. На выходе экструдера 4 установлена головка с обогревом. Обогрев зон головки и зон цилиндра производится системой автоматического регулирования температуры. Через головку экструдера 4 кабестаном 7 протягивается медная (алюминиевая) жила или заготовка кабеля. При вращении червяка экструдера 4 выпрессовывается изоляционная масса, которая, попадая на движущуюся жилу (заготовку кабеля), и формирует ее диаметр.
Кабестан 7 - тяговое устройство - представляет собой в зависимости от его конструкции либо набор колес, осуществляющих перемещение кабеля (жилы), либо гусеничную тягу. Для удобства в заправке одна гусеница является подъемной вверх-вниз относительно кабеля. Входной вал кабестана 7 получает вращение через редуктор от электродвигателя блока 6 регулирования оборотов.
Датчики 8 диаметра предназначен для измерения диаметра оболочки кабеля (провода). Конструктивно в настоящее время датчик 8 диаметра может быть выполнен с контактным способом измерения (ролики датчика 8 диаметра контактируют с изоляцией оболочки кабеля) или с бесконтактным способом (фотоэлектрическим) способом измерения. В первом случае подвижный ролик датчика 8 диаметра механически связан с индуктивным преобразователем, который включен в диагональ измерительного моста, на выходе которого установлен проградуированный в единицах диаметра измерительный прибор. Во втором случае свет от электрической лампочки (лазера) проходит через диаметр измеряемого кабеля и попадает на фотоприемник. На нем образуется тень, ширина которой фактически пропорциональна диаметру оболочки кабеля.
Регулятор 9 диаметра предназначен для формирования управляющего воздействия при подаче сигнала от датчика 8 диаметра. Этот регулятор представляет собой (в случае аналогового преобразования) хорошо известный аналоговый ПИД-регулятор с раздельными органами настройки пропорциональной, интегральной и дифференциальной частей. Как правило, ПИД-регулятор 9 представляет собой отдельно выполненный блок, внутри которого установлены электронные платы, а на лицевой панели располагаются органы настройки с индикаторными светодиодами для указания режимов работы. ПИД-регулятор 9 диаметра оснащен заправочным и автоматическим режимами работы.
Датчики 10 и 13 температуры обмоток электродвигателей предназначены для измерения их температуры и выдачи сигналов управления. Датчики 10 и 13 представляют собой терморезисторы, расположенные в обмотках электродвигателей при их изготовлении. Сигналы с датчиков 10 и 13 подаются в усилители-ограничители соответственно 11 и 14.
Сумматоры 16, 17, 18, 19 и 20 представляют собой аналоговые элементы алгебраического сложения сигналов. Они конструктивно могут быть выполнены либо на резисторах, либо на операционных усилителях, но могут входить частично и в соответствующие регуляторы, как в нашем случае.
Задатчики 1 совместной работы, 2 регулирования оборотов экструдера и 5 регулирования оборотов кабестана являются многооборотными потенциометрами, причем задатчик 1 по величине на порядок меньше задатчиков 2 и 5.
Система автоматического управления диаметром оболочки кабеля (провода) с оптимальной производительностью работает следующим образом.
Задатчик 1 совместной работы устанавливается в нулевое положение, а задатчики 2 и 5 в требуемые положения, определяющие диаметр оболочки кабеля (провода). При этом напряжения на выходах усилителей-ограничителей 11 и 14 в этом случае будут равны нулю, т.к. температура обмоток электродвигателей в блоках 3 и 6 (выходы 2 и 3 системы) пока равна окружающей температуре (Токр oС). Поэтому на входе регулятора 12 температуры обмотки электродвигателя экструдера напряжение будет равно напряжению задания температуры обмотки, и на его выходе сформируется в это время максимально возможное напряжение (фиг.5), которое и подается на задатчик совместной работы (фиг.1).
На выходе регулятора 15 сформируется напряжение, равное нулю (фиг.7), т. к. напряжение задания температуры обмотки будет заперто диодом VD1 (фиг.6). Система автоматического управления диаметром оболочки готова к запуску.
Для этого устанавливают задатчиком 1 совместной работы нужную производительность. При этом на задатчиках 2 и 5 появляются требуемые напряжения, которые поступают через сумматоры 18 и 19 в блоки регулирования 3 оборотов экструдера и 6 регулирования оборотов кабестана. В результате этого на выходе экструдера 4 формируется требуемый диаметр оболочки кабеля (провода) по 1 выходу системы. Этот диаметр измеряется датчиком 8 диаметра, сравнивается с заданным значением на сумматоре 20 и формирует регулятором 9 диаметра требуемый сигнал, с помощью которого производится коррекция сигнала задатчика 2 на сумматоре 18. В это время температуры обмоток электродвигателей экструдера и кабестана начинают превышать температуру окружающей среды. Поэтому на выходах усилителей- ограничителей 11 и 14 сигналов начинают появляться напряжения отрицательной полярности, которые поступают на сумматоры 16 и 17. По мере увеличения сигнала с усилителя-ограничителя при увеличении температуры обмотки электродвигателя будет уменьшаться напряжение на выходе регулятора 12, что приведет к снижению производительности системы и стабилизации температуры обмотки электродвигателя по этому каналу управления. Это происходит под контролем датчика 8 диаметра и регулятора 9 диаметра, которые вырабатывают корректирующий сигнал, стабилизируя диаметр оболочки кабеля. При увеличении температуры обмотки электродвигателя кабестана (3 выход системы) на выходе усилителя-ограничителя 14 появляется напряжение отрицательной полярности. Оно приведет к появлению на выходе регулятора 15 отрицательного напряжения, уменьшающего обороты кабестана через сумматор 19 и блок 6 регулирования оборотов. Это происходит под контролем датчика 8 диаметра и регулятора 9 диаметра, что приводит к стабилизации диаметра оболочки кабеля и в этом случае.
При аварийном повышении температуры обмотки электродвигателя экструдера напряжение на выходе регулятора 12 уменьшается до нулевого значения и система управления диаметром останавливается, не давая перегреться обмотке электродвигателя этого канала управления. При аварийном повышении температуры электродвигателя кабестана на выходе регулятора 15 формируется напряжение отрицательной полярности по величине, равной напряжению на задатчике 5 регулирования оборотов кабестана. Поэтому в этом контуре обороты кабестана снижаются до нуля. При этом через датчик 8 диаметра и регулятор 9 диаметра вырабатывается сигнал такой полярности, который становится равным напряжению на задатчике 2 регулирования оборотов экструдера, что приводит к остановке и этого контура управления. Следовательно, система автоматического управления диаметром оболочки кабеля (провода) плавно переходит из рабочего положения в аварийное, если перегрев обоих или любого из двигателей экструдера и кабестана не снижается, т. е. нагрузка не сильно увеличилась. Увеличение нагрузки, например, для электродвигателя экструдера может заключаться как в механической неисправности экструдера (электродвигателя), так и в неисправности системы автоматического регулирования зон экструдера. Увеличение нагрузки для электродвигателя кабестана может заключаться как в механической неисправности, так и в увеличении натяжения, например из-за неисправности отдающего устройства. Из-за возникших неисправностей предлагаемая система плавно переходит на пониженную производительность, пытаясь устранить возникшие перегревы в обмотках электродвигателей, при этом обеспечивается изготовление оболочки кабеля (провода) с требуемым диаметром и оптимальной производительностью. При изменении температуры окружающей среды производится коррекция ее значения с помощью резистора управления Ry в усилителях-ограничителях 10 и 14. Если применяются электродвигатели с классом изоляции, отличным от установленных, то в регуляторах 12 и 15 изменяются температурные уставки. Система автоматического управления диаметром оболочки кабеля (провода) с оптимальной производительностью продолжает функционировать аналогичным вышеописанному образом.
Это изобретение позволит исключить выходы из строя электродвигателей экструдера и кабестана, уменьшить брак при изготовлении кабелей на (4-5)% и повысить производительность на (11-12)%.
Изобретение относится к автоматическому управлению и может быть использовано для управления диаметром кабелей и проводов на экструзионных линиях. Техническим результатом изобретения является повышение надежности системы и уменьшения брака при оптимальной производительности. Это достигается тем, что в известную систему введены в каждый канал последовательно соединенные датчик температуры обмотки электродвигателя, усилитель-ограничитель сигнала, сумматор и регулятор температуры обмотки электродвигателя, причем вторым входом сумматора является заданная температура обмотки электродвигателя канала, к выходу регулятора в канале управления экструдером подключен задатчик совместной работы, а выход регулятора температуры в канале управления кабестаном подключен к второму входу сумматора, к первому входу которого подключен задатчик регулирования оборотов кабестана. 8 ил.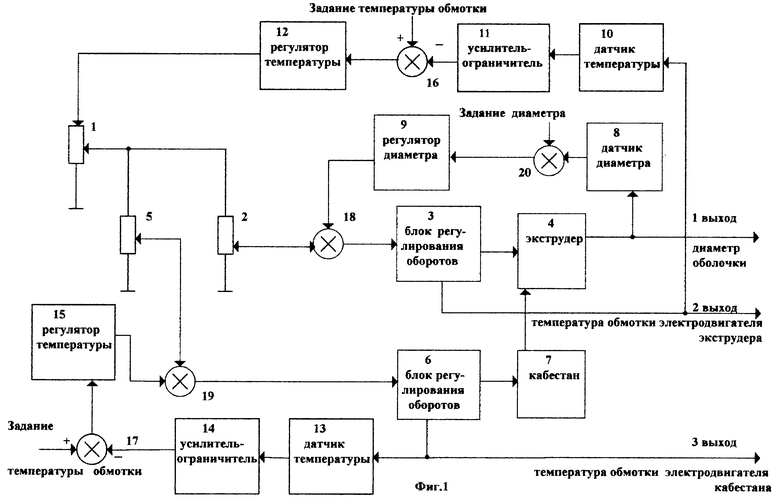
Система автоматического управления диаметром оболочки кабеля с оптимальной производительностью, содержащая два канала управления экструдером и кабестаном, каждый из которых включает последовательно соединенные задатчик оборотов, сумматор, блок регулирования оборотов, первый выход которого подключен к входу экструдера в первом канале и к входу кабестана во втором канале управления, выход кабестана соединен со вторым входом экструдера, выход которого является первым выходом системы, второй выход блока регулирования оборотов экструдера является вторым выходом системы, второй выход блока регулирования оборотов кабестана является третьим выходом системы, последовательно соединенные датчик диаметра оболочки кабеля, вход которого соединен с выходом экструдера, третий сумматор, второй вход которого является входом задатчика диаметра оболочки кабеля, и регулятор диаметра, выход которого подключен к второму входу сумматора в канале управления экструдером, и задатчик совместной работы, выход которого подключен к входам задатчиков оборотов, отличающаяся тем, что в нее введены в каждый канал управления последовательно соединенные датчик температуры обмотки электродвигателя, входом соединенный с вторым выходом блока регулирования оборотов, усилитель-ограничитель сигнала, сумматор, второй вход которого является входом задатчика температуры обмотки электродвигателя, и регулятор температуры обмотки электродвигателя, его выход в первом канале управления подключен к входу задатчика совместной работы, а во втором канале управления его выход подключен ко второму входу сумматора.
| Система регулирования диаметра кабельных изделий | 1982 |
|
SU1118967A1 |
| Способ автоматического контроля температуры якоря прокатного двигателя постоянного тока | 1962 |
|
SU150904A1 |
| Устройство для регулирования толщины изоляции кабельных изделий | 1985 |
|
SU1345176A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СРЕДНЕЙ ТОЛЩИНЫ ПЛАСТМАССОВОЙ ИЗОЛЯЦИИ КАБЕЛЬНОГО ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2110829C1 |

