Изобретение относится к устройствам управления тяговыми двигателями постоянного тока электроподвижного состава, преимущественно к тяговым приводам с применением двигателей независимого возбуждения.
Известно устройство для управления тяговым двигателем постоянного тока (см. описание к а.с. СССР №1368204, МПК В60L 15/08, опубл. 23.01.88). Известное устройство в цепи якоря тягового двигателя содержит датчик тока, выход которого соединен с одним из входов сумматора и усилителя-ограничителя, выход и другой вход которого подключены соответственно к входу и выходу интегратора, выход которого соединен с одним из входов сумматоров, другие входы которых подключены к выходам источников напряжения смещения, а выходы - к одним из входов соответственно блоков выделения минимального и максимального сигналов, другие входы которых соединены соответственно с выходами задатчика тока и блока выделения минимального сигнала, причем выход блока выделения максимального сигнала соединен с другим входом сумматора, к выходу которого подключен вход усилителя, соединенного выходом с управляющим входом регулятора тока. По одному из входов сумматоры выполнены вычитающими. При медленном изменении тока якоря тягового двигателя сигнал на выходе интегратора повторяет сигнал датчика тока, при скачкообразном изменении тока якоря выходной сигнал интегратора стремится с постоянной скоростью к новому значению сигнала датчика тока. В нормальном режиме величина задаваемого тока якоря задатчиком тока поддерживается за счет действия обратной связи по току. При этом сигнал на выходе одного сумматора на величину напряжения источника смещения больше, а сигнал на выходе второго сумматора на величину напряжения источника смещения меньше, чем сигнал датчика тока. В связи с этим на другой вход первого сумматора поступает сигнал с задатчика тока, который сравнивается с сигналом датчика тока и через усилитель разность сигналов поступает на управляющий вход регулятора тока.
Благодаря известной конструкции устройства для управления тяговым двигателем быстрое изменение параметров силовой цепи (напряжения питания, нагрузки) не приводит к скачкообразному изменению тока якоря. Ограничение производной тока двигателя осуществляется путем вычитания сигнала с датчика тока из сигнала с интегратора. Однако следует отметить, что данное устройство достаточно сложно и инерционно по времени регулирования.
В настоящее время на эксплуатируемом электрическом подвижном составе постоянного тока с коллекторными тяговыми двигателями (электровозы ВЛ10, ВЛ11, ВЛ15) применяются системы управления, в которых тяговые двигатели в режиме тяги включаются по схеме последовательного возбуждения, а в режиме рекуперативного торможения двигатели переключаются на независимое возбуждение. Для схем последовательного возбуждения характерно удовлетворительное качество переходных процессов при колебаниях напряжения в контактной сети, приемлемое распределение нагрузок между параллельными ветвями тяговых двигателей и склонность к разносному буксованию колес при потере сцепления с рельсами.
Наиболее близким по технической сущности к заявляемому является устройство для управления тяговыми двигателями, используемое на электровозе ВЛ-15 в режиме рекуперативного торможения (см. Кужим М.Ф., Савичев Н.В. Электровоз ВЛ-15. Справочник для локомотивных и ремонтных бригад. СПб «Астерион», 2002).
Известное устройство для управления тяговыми двигателями содержит реактор (Lp), включенный в якорную цепь двигателей, последовательно включенный в эту цепь быстродействующий контактор (БК), контакты которого шунтированы резистором (R1), обмотки возбуждения (OB1 и ОВ2), включенные последовательно и запитанные от управляемого выпрямителя (U1), выходы которого зашунтированы тиристором (V1) с резистором (R2). Указанный управляемый выпрямитель входит в состав статического преобразователя собственных нужд.
Недостатком данного устройства для управления тяговыми двигателями является то, что при бросках напряжения в контактной сети в цепи якорей будет действовать эдс самоиндукции реактора (Lp), пропорциональная скорости изменения тока якорей и направленная встречно изменению напряжения в контактной сети. В результате действия этой эдс будет замедляться процесс изменения тока якоря, но величина броска тока якоря не будет уменьшаться. Для уменьшения величины броска тока якоря необходимо соответствующее изменение магнитного потока в тяговых двигателях, поэтому для ограничения величины броска тока якорей путем форсированного изменения магнитного потока тяговых двигателей необходим многократный запас по выходному напряжению управляемого выпрямителя (U1).
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение надежности устройства для управления за счет обеспечения динамической обратной связи по току возбуждения без многократного повышения мощности по напряжению управляемого выпрямителя.
Указанный технический результат достигается тем, что в известном устройстве для управления тяговыми двигателями постоянного тока электроподвижного состава, содержащем якорную цепь группы тяговых двигателей, реактор (Lp) и быстродействующий контактор (БК), контакты которого шунтированы резистором (R1), обмотки возбуждения (OB1 и ОВ2), включенные последовательно и запитанные от управляемого выпрямителя (U1), выходы которого зашунтированы тиристором (V1) с резистором (R2), согласно изобретению реактор (Lp) включен одновременно в цепь якорей и контур обмоток возбуждения (OB1 и ОВ2) для обеспечения динамической обратной связи по току возбуждения.
Заявляемое устройство для управления выпрямителем питания обмоток возбуждения при использовании тяговых двигателей независимого возбуждения обеспечивает плавное изменение тока в обмотках возбуждения от нуля до максимального значения. Предлагается регулирование тока возбуждения осуществлять по закону
Iв=Iв0+k×Iя,
где: Iв - ток возбуждения тяговых двигателей группы;
Iв0 - задание тока возбуждения двигателей группы, установленное системой управления электровоза;
k - коэффициент компаундирования, определяющий глубину обратной связи по току якоря;
Iя - ток якоря тяговых двигателей группы.
Такой закон регулирования тока возбуждения тяговых двигателей независимого возбуждения предоставляет возможность изменять жесткость тяговых характеристик электровоза за счет изменения коэффициента компаундирования средствами системы управления электровозом в процессе движения поезда в зависимости от условий сцепления и уровня нагрузки. В неустановившихся режимах работы, которые вызваны колебаниями напряжения в контактной сети, форсированное изменение тока возбуждения тяговых двигателей достигается не за счет значительного изменения выходного напряжения управляемого выпрямителя, питающего обмотки возбуждения, а за счет эдс самоиндукции реактора, которая пропорциональна скорости изменения тока якоря тяговых двигателей. Указанная эдс может превышать выходное напряжение управляемого выпрямителя более чем на порядок. Наибольшее влияние на изменение тока возбуждения тяговых двигателей эдс самоиндукции реактора оказывает в начальной стадии переходного процесса, когда выходное напряжение управляемого выпрямителя из-за неизбежного запаздывания не успевает существенно измениться. Это позволяет приблизить качество переходных процессов в силовых цепях электровоза с двигателями независимого возбуждения к показателям, характерным для электровозов с тяговыми двигателями последовательного возбуждения. При этом можно избежать существенного увеличения мощности управляемого выпрямителя по сравнению с мощностью, необходимой для установившихся режимов работы. Таким образом, включение реактора одновременно в цепь якорей и контур обмоток возбуждения (OB1 и ОВ2) обеспечивает динамическую обратную связь по току якоря и предопределяет стабильность работы тяговых двигателей, при этом достигается уменьшение потерь в реакторе и увеличение кпд в режиме тяги за счет того, что по катушке реактора протекает разность токов якорей и тока возбуждения, а не ток якорей.
На чертеже показана функциональная схема устройства для управления тяговыми двигателями постоянного тока электроподвижного состава, общий вид.
Устройство содержит якорную цепь группы тяговых двигателей 1 и 2, реактор 3 и быстродействующий контактор 4, контакты которого шунтированы резистором 5, обмотки возбуждения 6 и 7 тяговых двигателей, включенные последовательно и запитанные от управляемого выпрямителя 8, выходы которого зашунтированы тиристором 9 с резистором 10, при этом реактор 3 включен одновременно в цепь якорей тяговых двигателей и контур обмоток возбуждения 6 и 7.
В связи с очевидностью работы заявляемого устройства (схемы) традиционное ее изложение нецелесообразно, но некоторые аспекты ее работы, с последовательным возбуждением тяговых двигателей в режиме тяги и с независимым возбуждением в режиме рекуперативного торможения с питанием обмоток возбуждения от статического преобразователя, изложены ниже.
Тяговые двигатели работают в режиме тяги или электрического торможения без каких-либо переключений. Различаются режимы тяги электрического торможения лишь направлением тока якоря тяговых двигателей. Если напряжение в контактной сети превышает эдс якорей двигателей, устанавливается тяговый режим (Iad). В тех случаях, когда эдс якорей двигателей превышает напряжение в контактной сети, устанавливается режим электрического торможения (Iаг). Направление тока в обмотках возбуждения при переходах из режима тяги в режим электрического торможения и наоборот не изменяется.
Группы тяговых двигателей электровоза (на чертеже показана одна из них) могут соединяться все последовательно или в несколько параллельных ветвей для различных диапазонов скорости движения. После завершения пускового режима, когда сопротивление пускового резистора снижается до нуля, регулирование скорости движения осуществляется изменением магнитного потока тяговых двигателей за счет изменения тока в обмотках возбуждения. При этом сила тяги может изменяться в широком диапазоне в пределах максимально допустимых значений силы тяги и силы рекуперативного торможения. Включение реактора одновременно в цепь якорей тяговых двигателей и контур обмоток возбуждения обеспечивает отрицательную обратную связь по току якоря, что позволяет всей системе управления срабатывать без запаздывания.
Полупромышленные испытания заявленного устройства, проведенные на заводе УЗЖМ (г.Верхняя Пышма, Свердловской обл.), показали его надежность за счет обеспечения динамической обратной связи по току возбуждения без многократного повышения мощности по напряжению управляемого выпрямителя. Кроме того, было выявлено уменьшение потребной индуктивности реактора, а это ведет к снижению его массы и габаритов. Снижение потери энергии в реакторе в режиме тяги, так как по реактору протекает не ток якорей, а разность токов якорей и возбуждения тяговых двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для возбуждения тяговых электродвигателей электроподвижного состава | 1980 |
|
SU925694A1 |
| ПРИВОД ЭЛЕКТРОВОЗА (ВАРИАНТЫ) | 2007 |
|
RU2333850C1 |
| Устройство для возбуждения тяговых электродвигателей | 1982 |
|
SU1120473A1 |
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ РЕЖИМА РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2370381C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2018 |
|
RU2724981C2 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕКУПЕРАТИВНО-РЕОСТАТНАЯ | 2016 |
|
RU2646688C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1980 |
|
SU943024A1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1973 |
|
SU393140A1 |
| СПОСОБ ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208529C2 |
Изобретение относится к области электрифицированного железнодорожного транспорта и направлено на повышение надежности устройства для управления тяговыми электродвигателями по току возбуждения. Устройство для управления тяговыми двигателями постоянного тока электроподвижного состава содержит якорную цепь группы тяговых двигателей, реактор (Lp) и быстродействующий контактор (БК), контакты которого шунтированы резистором (R1). Обмотки возбуждения (OB1 и ОВ2) включены последовательно и запитаны от управляемого выпрямителя (U1), выходы которого зашунтированы тиристором (V1) с резистором (R2). Согласно изобретению реактор (Lp) включен одновременно в цепь якорей и контур обмоток возбуждения (OB1 и OB3) для обеспечения динамической обратной связи по току возбуждения. Технический результат заключается в обеспечении плавного изменения тока в обмотках возбуждения от нуля до максимального значения и повышении надежности устройства. 1 ил.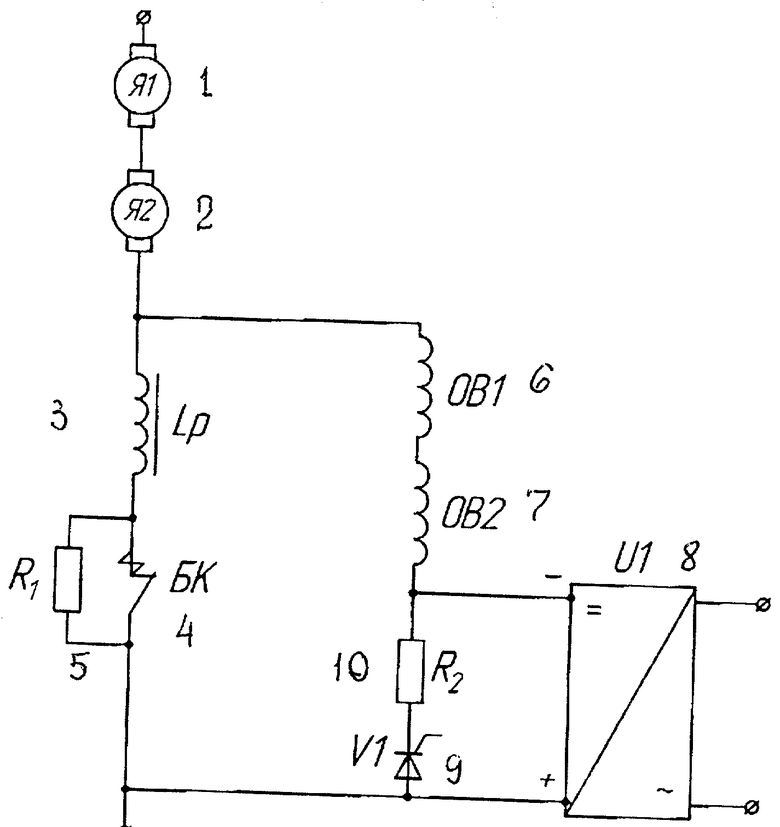
Устройство для управления тяговыми двигателями постоянного тока электроподвижного состава, содержащее якорную цепь группы тяговых двигателей, реактор (L1) и быстродействующий контактор (БК), контакты которого шунтированы резистором (R1), обмотки возбуждения (OB1 и ОВ2), включенные последовательно и запитанные от управляемого выпрямителя (U1), выходы которого зашунтированы тиристором (V1) с резистором (R2), отличающееся тем, что реактор (Lp) включен одновременно в цепь якорей и контур обмоток возбуждения (OB1 и ОВ2) для обеспечения динамической обратной связи по току возбуждения.
| Привод электровоза | 1975 |
|
SU569464A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2005 |
|
RU2288111C1 |
| ПРИВОД ЭЛЕКТРОВОЗА | 2005 |
|
RU2292272C1 |
| Диспергатор-смеситель | 1988 |
|
SU1563987A1 |

