Настоящее изобретение в общем относится к так называемому методу "формирования луча" по акустическим сигналам.
Использование направленных акустоэлектрических преобразований и особенно таких микрофонов является одним из наиболее эффективных способов улучшения отношения сигнал/шум в аудиосистемах. Известен способ реализации направленных микрофонов с использованием матрицы микрофонных ячеек и временной задержки, а также наложения выходных сигналов таких ячеек, который называют методом "задержки и суммирования".
Этот известный принцип с двумя всенаправленными микрофонными ячейками показан на фиг.1. Всенаправленные микрофоны 1 и 2 расположены друг от друга на расстоянии р. Выходной сигнал микрофонов, соответствующий сигналу A1, задерживается во времени на величину времени τ, при этом задержанный во времени сигнал, соответствующий А1, накладывается в блоке 3 наложения на незадержанный выходной сигнал А2 микрофона 2. На выходе блока 3 наложения формируется результирующий выходной сигнал Аr с усилением в зависимости от характеристики угла θ падения, как показано на фиг.2, для одной рассматриваемой частоты  Таким образом, время τ задержки обычно выбирают равным отношению расстояния р и скорости звука с. Такое расположение приводит в итоге к кардиодной характеристике направленности первого порядка (фиг.2). Можно показать, что амплитуда результирующего сигнала Аr, пропорциональна синусу частоты
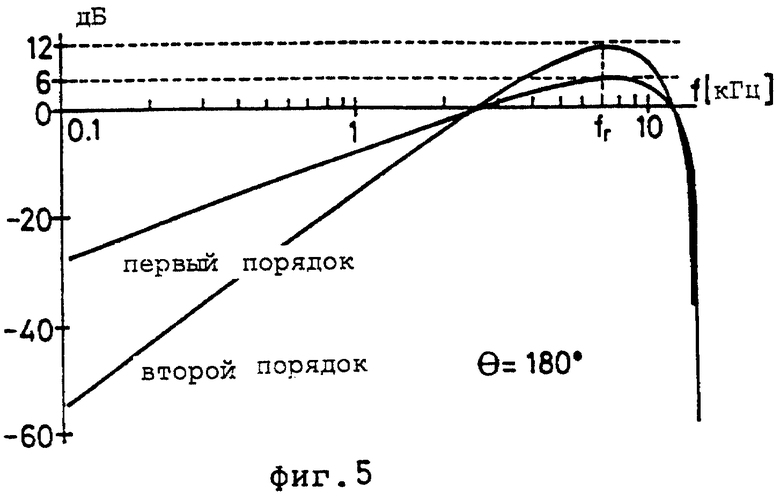
Таким образом, время τ задержки обычно выбирают равным отношению расстояния р и скорости звука с. Такое расположение приводит в итоге к кардиодной характеристике направленности первого порядка (фиг.2). Можно показать, что амплитуда результирующего сигнала Аr, пропорциональна синусу частоты  сигнала и расстоянию р. Максимальное усиление в направлении 180o цели происходит на частоте fr=с/(4р). При расстоянии р, равном 12 нм, частота fr становится приблизительно равной 7 кГц.
сигнала и расстоянию р. Максимальное усиление в направлении 180o цели происходит на частоте fr=с/(4р). При расстоянии р, равном 12 нм, частота fr становится приблизительно равной 7 кГц.
При расположении более одного устройства с двойной ячейкой (фиг.1) в шахматном порядке и наложении результирующих сигналов Аr от более чем одного устройства со сдвоенной ячейкой можно получить кардиодную характеристику направленности высокого порядка.
На фиг. 3 показана известная схема устройства, при которой реализуются кардиодные характеристики направленности второго порядка (фиг.4). Таким образом, можно получить более узкий луч ("диаграмму направленности"). Чем выше порядок направленного микрофонного устройства, тем выше становится индекс направленности и усиления на частоте fr, и тем круче будет загиб для нижней и высокой частот и выше число нежелательных боковых лепестков. Что касается определения индекса направленности, то можно сослаться на речевую связь 20 (1996), 229-240, "Микрофонные матричные системы для громкоговорящей связи", Гарри У. Елко ("Microphone array systems for hands-free telecommunications" Garry W. Eiko).
На фиг. 5 показана зависимость коэффициента усиления от частотной характеристики первой и второй кардиодных характеристик направленности для угла падения θ = 180°. Из него ясно видны высокочастотные и низкочастотные загибы.
Такие методы формирования луча хорошо известны и реализованы с использованием обработки аналоговых сигналов, например, в патентах US-A-2237298, US-A-4544927, US-A-4703506, US-A-5506908, или с использованием цифровой обработки сигналов во временной или частотной области, например, в патентах ЕР-А-0381498 (временная область) или в патенте US-A-5581620 (частотная область).
Методы формирования, реализованные с помощью любых из этих подходов, имеют следующие недостатки:
a) Результирующий сигнал затухает на низких частотах, что приводит к низкому отношению сигнал-шум.
b) Индекс направленности очень чувствителен к согласованию отдельных микрофонных ячеек, особенно на низких частотах.
c) Расстояние р между микрофонными ячейками должно быть большим (>12 мм) для диапазона звуковых частот.
d) Диапазон частот с высоким коэффициентом усиления в направлении цели является слишком маленьким, как хорошо видно из фиг.5.
e) Направленность значительно зависит от числа микрофонных ячеек и таким образом от сложности всей установки.
f) В результате высокой направленности за счет увеличения числа ячеек появляется больше нежелательных боковых лепестков.
Для устранения некоторых из этих недостатков предложено несколько методов.
В патенте WO 95/20305 (Е. Линдеманн (E.Lindemann)) предложена адаптивная система для уменьшения шума и использования в стереофоническом слуховом аппарате. Она обнаруживает мощность принятых сигналов для отделения желательных сигналов от нежелательных.
Предложена решетка микрофонных ячеек с "широкой стороной", то есть направление на цель перпендикулярно оси, проходящей от одного микрофона к другому, в противоположность расположению "в линию", соответствующему, например, фиг.1 и принципам настоящего изобретения.
Раскрытое устройство является громоздким (>5 см), поэтому оно не пригодно для слухового аппарата, предназначенного для одного уха.
Два равных лепестка диаграммы направленности вырабатываются в направлении цели и в противоположном направлении.
В таком слуховом аппарате между левой и правой слуховой системой должно быть предусмотрено подсоединение, что делает слуховой аппарат неудобным. Кроме того, как описано тем же самым автором в работе "Формирователь луча в нелинейной частотной области с двумя микрофонами для уменьшения шума в слуховом аппарате" 1995 ("Two microphone non-linear frequency domain beam former for hearing aid noise reduction" 1995, IEEE ASSP Workshop on applications of Signal Processing to Audio and Acoustics, October 15-18, Mohonk, New Paltz, New York), такое формирование луча ("диаграммы направленности") является эффективным только приблизительно до 2 кГц и приводит к искажениям необходимых сигналов.
В патенте US-A-4653102 предлагается использовать два направленных микрофона, нацеленных на цель, и третий микрофон, нацеленный в противоположном направлении. Сигнал третьего микрофона, предположительно содержащего только шум, используется для формирования характеристики двух основных микрофонов. Этот метод, очевидно, имеет недостаток внутри реверберирующих помещений, где необходимый сигнал отражается от стен, пола, потолка и мебели, и поэтому рассматривается как шум. Кроме того, этот метод является неудобным, так как требует использования по меньшей мере трех микрофонов.
Дополнительное внимание вызывают патенты US-A-5400409 и 5539859.
В качестве примера известных методов, формирующих диаграммы направленности в патенте US-5539859, предложен метод, в котором характеристика приема регистрируется на том направлении, откуда падает звуковая волна с самой высокой энергией на пару микрофонов, и рассматривается в звуковой среде. Принципиальным моментом является то, что весь звук, падающий с направлений, отличных от направлений звука с самой высокой энергией, рассматривается как шум, и его прием отменяется.
Тем самым аналого-цифровое преобразование и последующее преобразование временной области в частотную выполняется над выходными сигналами двух микрофонов. Используя знание о фиксированном взаимном расстоянии между двумя микрофонами, от которого зависит разность фаз спектра падающего сигнала, можно определить взаимную фазировку и таким образом направление падения звуковых сигналов с самой высокой энергией, то есть, направление на источник звука с самой высокой энергией в пределах акустического окружения. Сигналы, приходящие с этого направления, усиливаются посредством фазового сдвига и суммирования, подобно методу автокорреляции, посредством чего сигналы, падающие под другими углами падения, подавляются как шум.
Благодаря этому методу распределение энергии в звуковой среде улавливает избирательность приема, и невозможно свободно выбрать или предварительно выбрать максимальную характеристику приема, например, в направлении, откуда должен поступать избирательно звук, независимо от его относительной энергии. Одной областью, где такая избирательность, независимо от распределения энергии внутри звукового окружения будет иметь очевидное преимущество, является метод вспомогательного прослушивания.
Задача настоящего изобретения заключается в выполнении способа электронного формирования предварительно определенной характеристики усиления в зависимости от направления, с которого поступают акустические сигналы по меньшей мере в два пространственно разнесенных акустоэлектрических преобразователя и соответствующее устройство акустического датчика, с которым необходимо использовать только небольшое число микрофонов или микрофонных ячеек и которое таким образом является реализацией, являющейся маленьким компактным направленным преобразователем или микрофоном. Таким образом, предпочтительное устройство, согласно настоящему изобретению, представляет собой слуховой аппарат, и в особенности слуховой аппарат, предназначенный для одного уха.
Другая задача заключается в выполнении такого способа и устройства с хорошей частотной характеристикой в диапазоне звуковых частот, например в пределах 0,1-10 кГц.
Другая задача настоящего изобретения заключается в выполнении такого способа и устройства, который позволяет получить реализацию с высоким отношением сигнал/шум без нежелательных боковых лепестков и с легко изменяемой формой диаграммы направленности, например для акустического увеличения.
Эти и другие задачи реализуются с помощью способа изобретения, который содержит этапы: периодически определяют из сигналов, зависящих от акустических сигналов, соответствующий взаимный сигнал задержки, соответствующий задержке при приеме по меньшей мере в двух преобразователях, подвергают сигнал, зависящий от выходного сигнала по меньшей мере двух преобразователей для фильтрации с помощью характеристики передачи фильтрации, и управляют характеристикой передачи фильтрации в зависимости от взаимного сигнала задержки, дополнительно используют сигнал, который зависит от выходного сигнала фильтрации, в качестве электрического сигнала приема.
Для выполнения вышеупомянутых задач устройство акустического датчика изобретения содержит по меньшей мере два акустоэлектрических преобразователя, размещенных на предварительно определенном взаимном расстоянии в направлении цели, блок обнаружения временной задержки, который имеет по меньшей мере два входа и выход, причем его входы соответственно подсоединены в рабочем состоянии к выходам двух преобразователей, посредством чего блок обнаружения временной задержки вырабатывает выходной сигнал в зависимости от временной задержки акустических сигналов, падающих по меньшей мере на два пространственно разнесенных преобразователя, предпочтительно блок преобразования временной области в частотную область, вырабатывающий выходной сигнал из блока обнаружения временной задержки в частной области, блок взвешивания предварительно определенной характеристикой взвешивания и с входом и выходом, при этом вход подсоединяется в рабочем состоянии к выходу блока обнаружения временной задержки и принимает сигнал от указанного выхода блока обнаружения временной задержки в режиме частотной области с помощью блока фильтрации с управляемой характеристикой передачи, которая имеет по меньшей мере один вход, вход управления и выход, и после этого вход подсоединяется в рабочем состоянии по меньшей мере к одному из выходов по меньшей мере двух преобразователей, предпочтительно через по меньшей мере один преобразователь временной области в частотную область, при этом вход управления подсоединен в рабочем состоянии к выходу блока взвешивания, блок фильтрации, вырабатывающий выходной сигнал в зависимости от своего входного сигнала и его характеристика передачи, которой управляют с помощью сигнала (предпочтительно спектрального сигнала), который подается на управляющий вход блока фильтрации, причем это взвешивание (предпочтительно спектральное взвешивание) полученного в результате сигнала зависит от выходного сигнала блока обнаружения временной задержки и характеристики взвешивания блока взвешивания.
Краткое описание чертежей
Другие задачи, преимущества и специфические варианты осуществления настоящего изобретения иллюстрируется ссылкой на сопроводительные чертежи, на которых:
фиг. 1 изображает функциональную блок-схему размещения направленного микрофона с двумя ячейками, в соответствии с принципом, известным из уровня техники "задержки и суммирования";
фиг. 2 изображает кардиодную характеристику усиления первого порядка из известного уровня техники по фиг.1;
фиг. 3 изображает отличие схемы устройства, соответствующей методу "задержки и суммирования" для реализации характеристики второго порядка от схемы устройства, известной из предшествующего уровня техники по фиг.1;
фиг. 4 изображает кардиодную характеристику усиления второго порядка, которая реализована с помощью схемы устройства, известного из предшествующего уровня техники по фиг.3;
фиг.5 изображает харектеристику усиления устройства в зависимости от частоты, согласно фиг. 1 или 3, при угле падения для максимального усиления акустических сигналов;
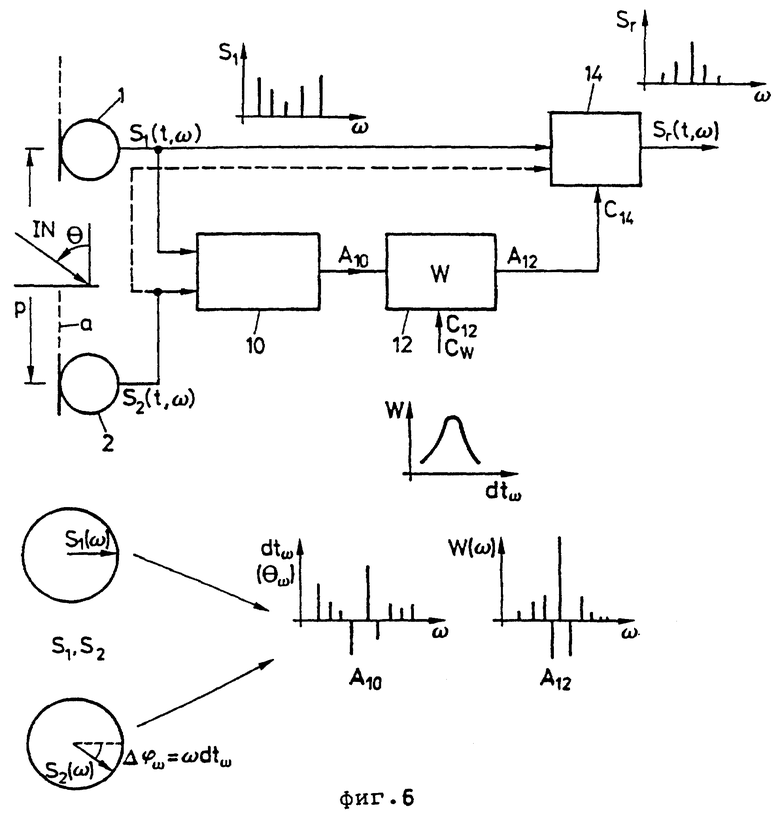
фиг.6 изображает упрощенную функциональную блок-схему устройства в соответствии с изобретением, работающим согласно способу в соответствии с изобретением, и дополнительно показывает последовательность обработки сигналов;
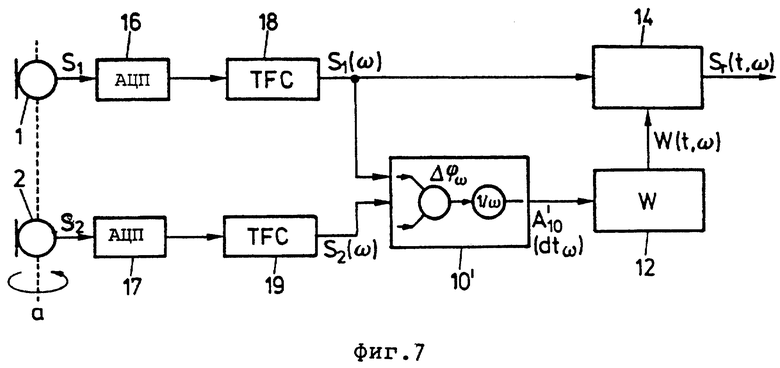
фиг. 7 изображает в соответствии с фиг.6 первую предпочтительную форму реализации устройства в соответствии с изобретением, которое работает согласно способу в соответствии с изобретением;
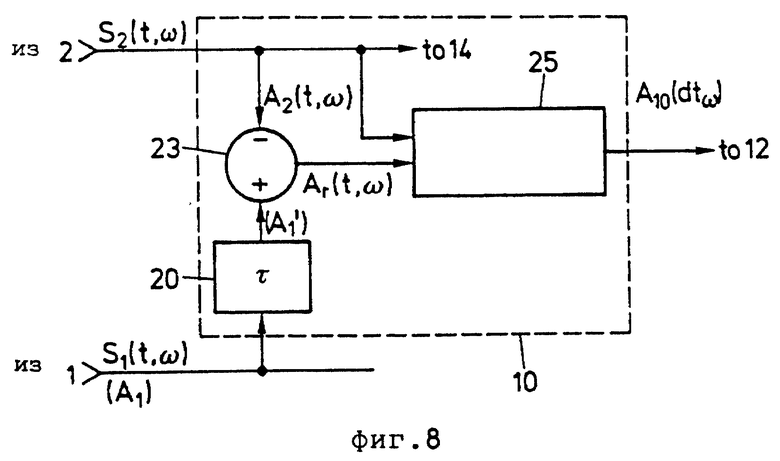
фиг. 8 изображает дополнительную предпочтительную форму реализации блока обнаружения временной задержки устройства в соответствии с изобретением, которое работает в соответствии со способом изобретения по фиг.6;
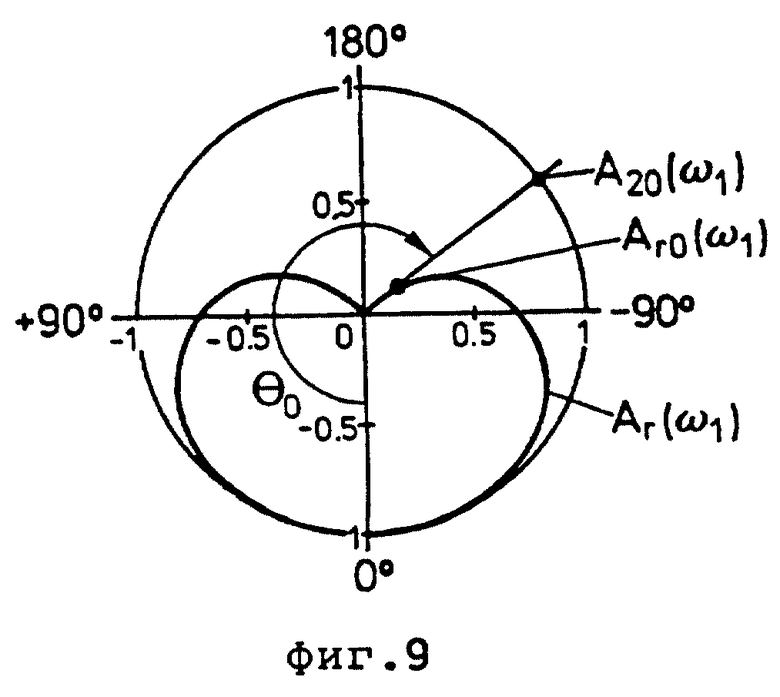
фиг.9 изображает график в полярных координатах сигналов в соответствии с вариантом осуществления по фиг.8 для объяснения работы блока сравнения, который предусмотрен в варианте осуществления по фиг.8;
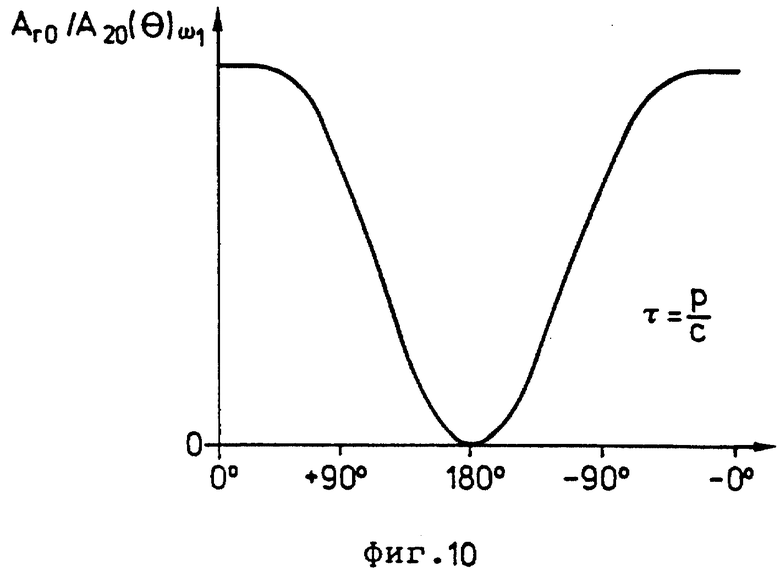
фиг. 10 изображает диаграмму результатов сравнения в зависимости от угла падения акустического сигнала, согласно варианту осуществления по фиг.8;
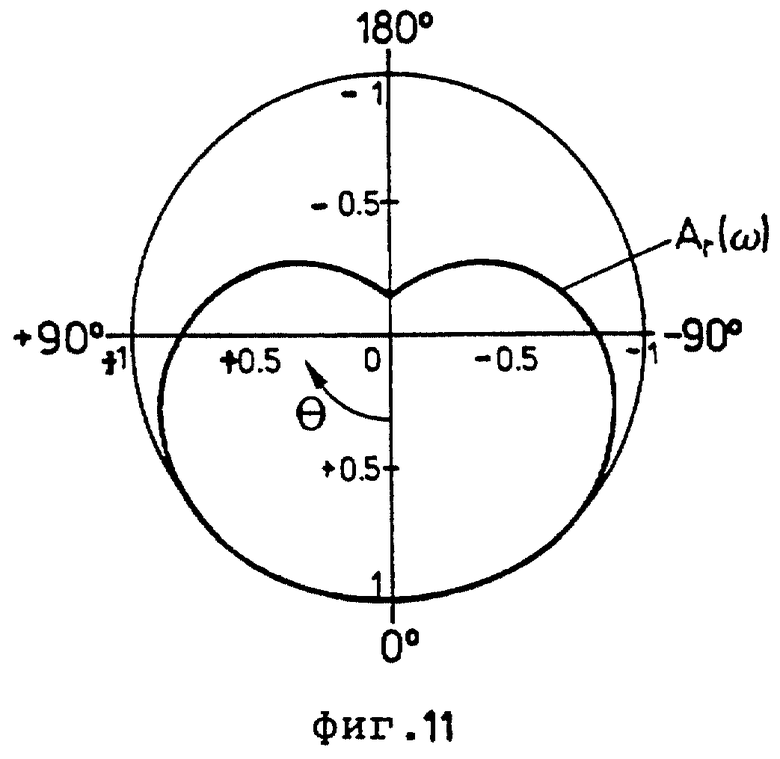
фиг.11 изображает предпочтительную форму реализации сигнала, полученного в результате наложения, которая зависит от угла падения акустического сигнала в варианте осуществления по фиг.8;
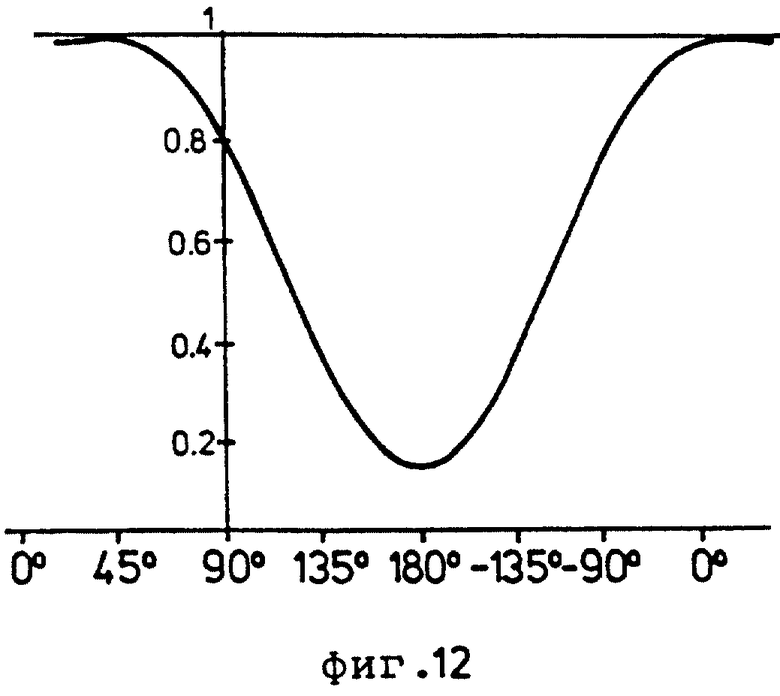
фиг. 12 изображает в представлении, соответствующем фиг.10, диаграмму результатов сравнения, которые реализованы согласно предпочтительному варианту осуществления и являются итоговой зависимостью по фиг.11;
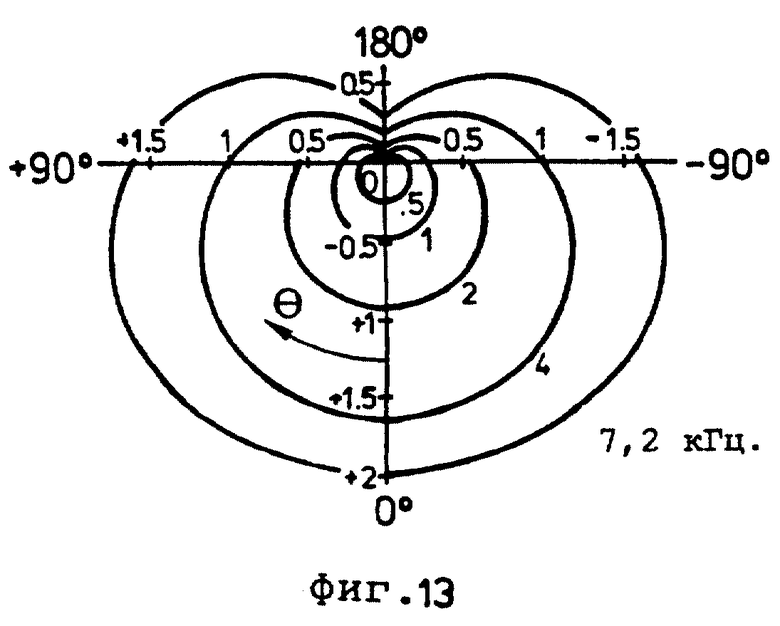
фиг.13 изображает схематически в полярных координатах зависимость сигналов, полученных в результате наложения, от угла падения акустических сигналов и от частоты, которая реализуется согласно варианту осуществления по фиг.8;
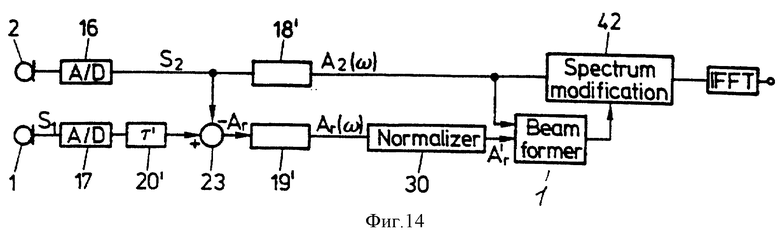
фиг. 14 изображает предпочтительную форму реализации варианта осуществления по (фиг.8) с дополнительным подавлением частотной зависимости, которая показана на фиг.13;
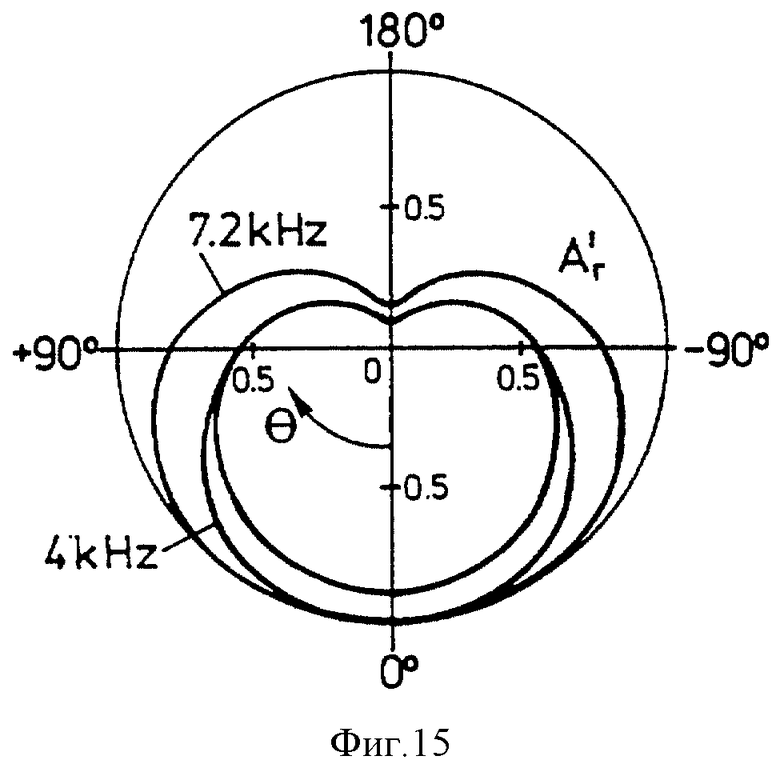
фиг. 15 изображает в представлении, соответствующем фиг.13, зависимость нормированного сигнала, полученного в результате наложения, согласно варианту осуществления (фиг.14) от функции частоты первой предпочтительной нормализации;
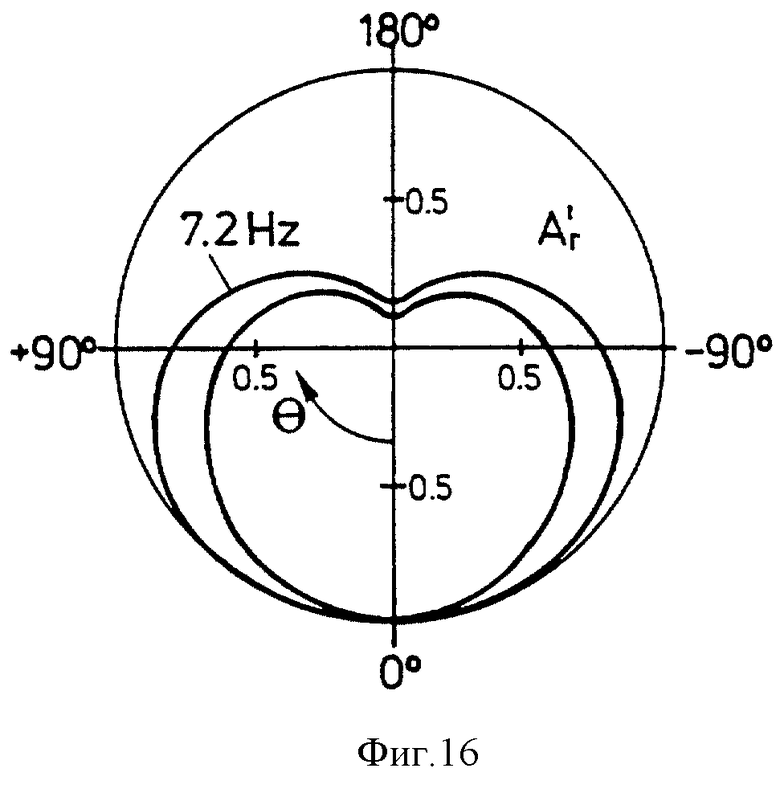
фиг.16 изображает представление, соответствующее фиг.15, реализованное с помощью функции частоты второй предпочтительной нормализации, согласно варианту осуществления по фиг.14;
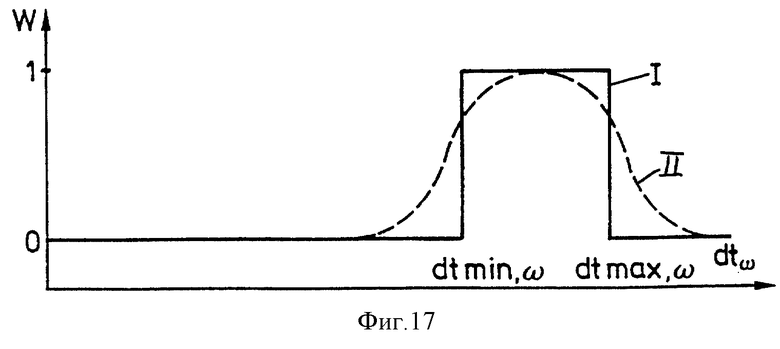
фиг. 17 изображает первую (сплошная линия) и вторую (пунктирная линия) форму предпочтительной реализации амплитудной характеристики фильтра согласно варианту осуществления (фиг.6 или 7);
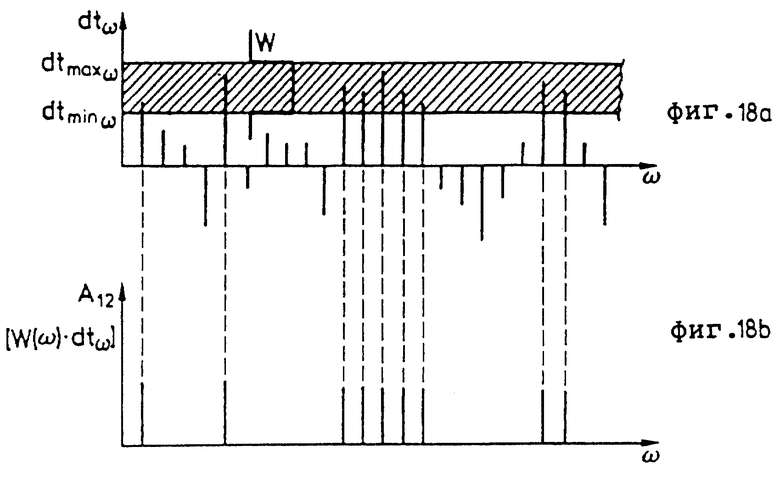
фиг. 18а изображает влияние амплитудной характеристики фильтра в зависимости от амплитудной характеристики передачи, согласно фиг.17 (сплошная линия), на выходной сигнал блока обнаружения задержки, который выполнен согласно варианту осуществления (фиг.6 или 7);
фиг.18b изображает выходной сигнал блока обнаружения временной задержки, который проходит через амплитудный фильтр с переходной характеристикой, соответствующей фиг. 17 (сплошная линия) и реализованный, согласно варианту осуществления (фиг.6 или 7);
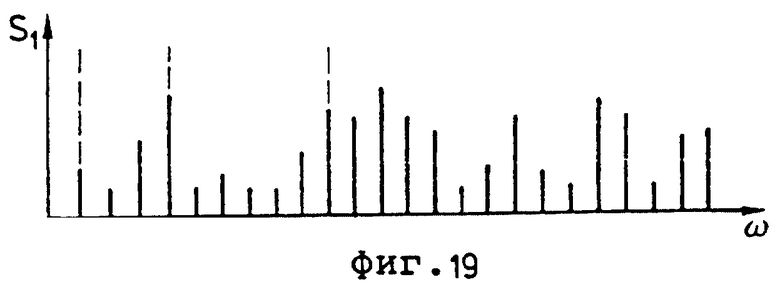
фиг. 19 изображает спектр акустического сигнала, который преобразовывают в электрический и вводят в фильтр с управляемой частотой, который осуществляется с помощью настоящего изобретения (фиг.6);
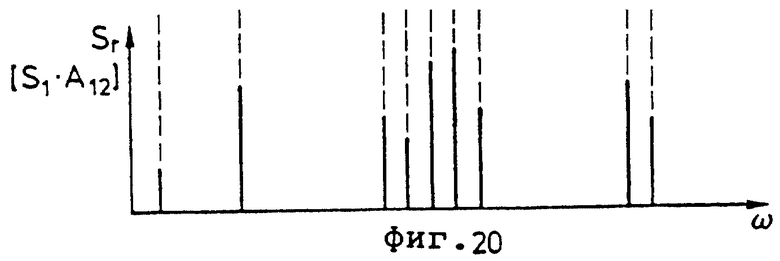
фиг. 20 изображает принятый электрический сигнал, который реализуется с помощью характеристики амплитудного фильтра, в соответствии с фиг. 17 (сплошная линия), и сигнала приема, который представлен на фиг.19 в варианте осуществления изобретения по фиг.6;
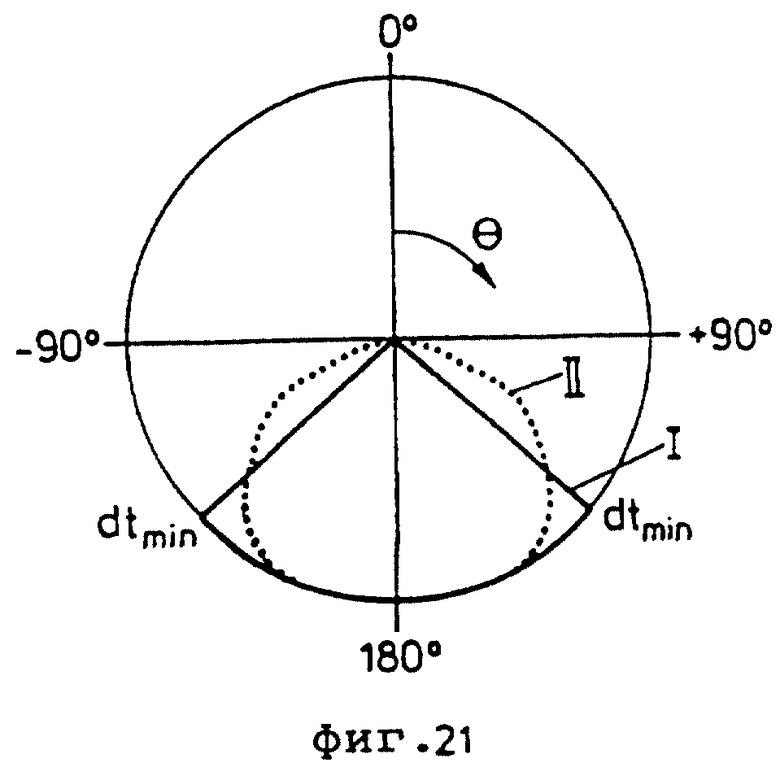
фиг. 21 изображает результирующую зависимость усиления от угла падения акустического сигнала, который реализуется посредством характеристики амплитудного фильтра по фиг.17 (сплошная и пунктирная линии);
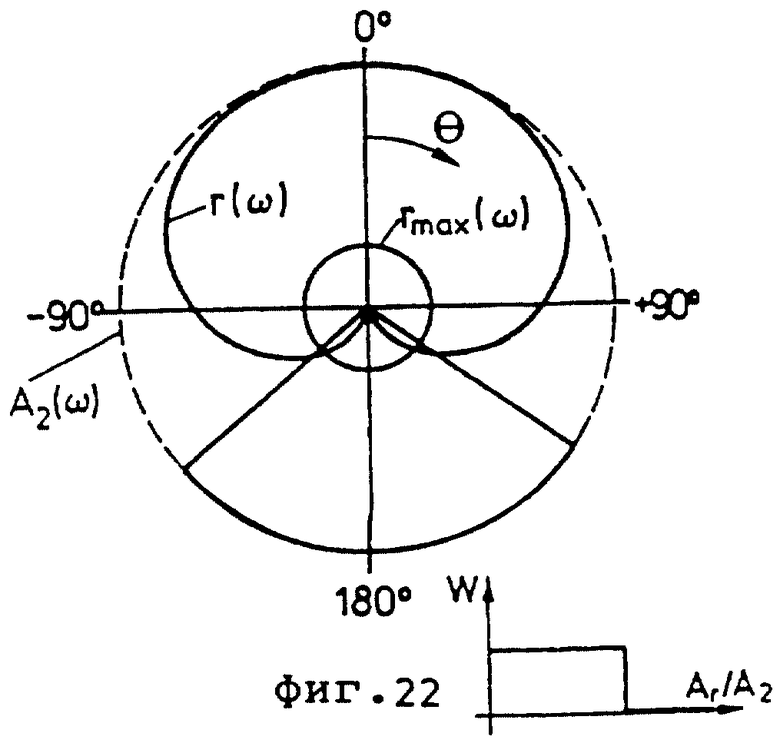
фиг. 22 изображает коэффициент усиления в зависимости от характеристики угла падения, как представлено в вариантах осуществления по фиг.6 или фиг.8, 14 изобретения, осуществляя использование характеристики амплитудного фильтра с характером изменения спектральной амплитудной передачи от максимум до минимума;
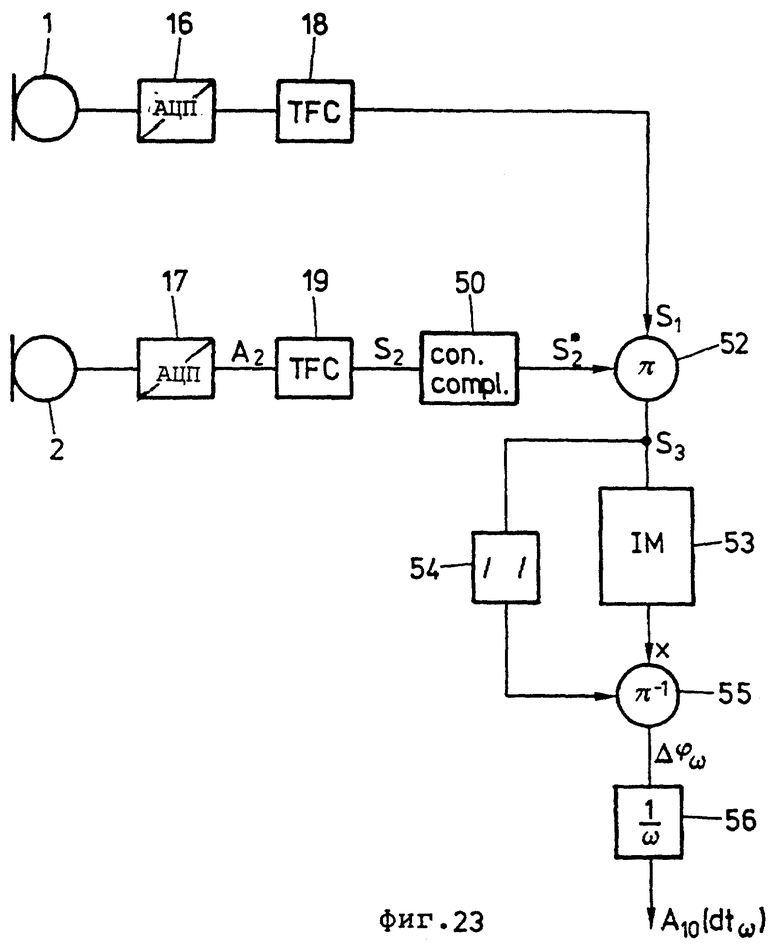
фиг. 23 изображает упрощенную сигнальную/функциональную блок-схему дополнительного предпочтительного варианта осуществления изобретения;
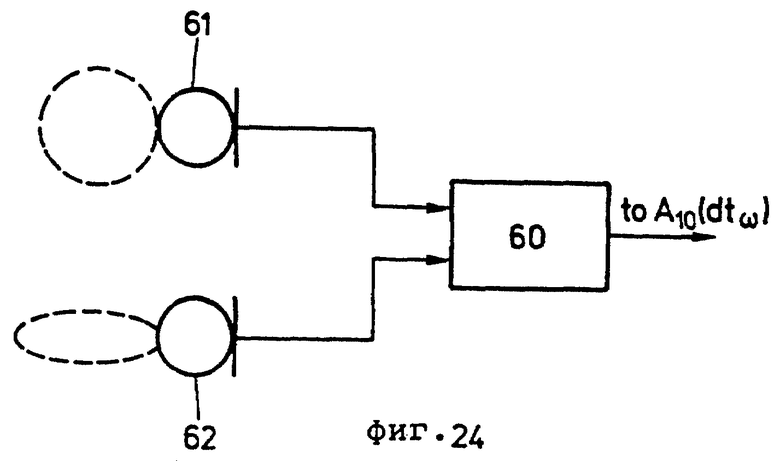
фиг.24 изображает функциональную схему с прохождением сигнала для работы в дополнительном режиме реализации блока обнаружения временной задержки (фиг.6) и
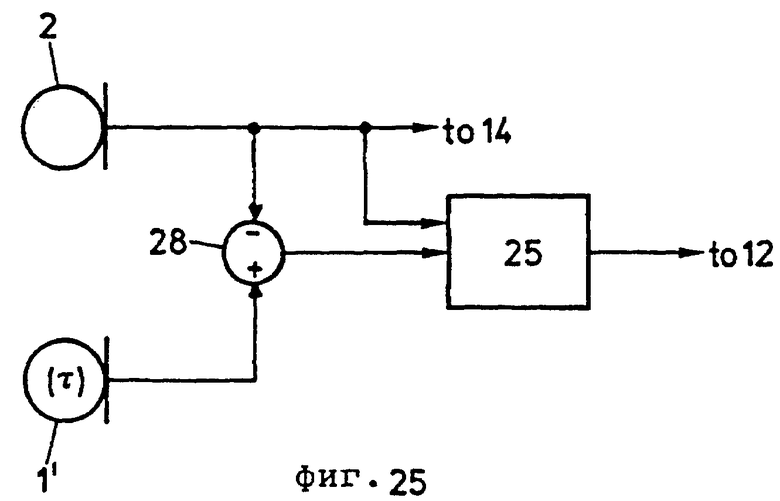
фиг.25 изображает функциональную схему с прохождением сигнала для работы в дополнительном режиме реализации блока обнаружения временной задержки, согласно методу (фиг.8 или фиг.14).
Подробное описание предпочтительного варианта осуществления
На фиг. 6 показаны в виде функциональной блок-схемы совместно с принципиальными схемами обработки сигнала способ и устройство в соответствии с изобретением.
По меньшей мере два акустоэлектрических преобразователя 1 и 2, в частности, микрофоны или микрофонные ячейки, находятся на предварительно определенном расстоянии р друг от друга по оси а. Акустические сигналы IN принимают с помощью преобразователей 1 и 2, так как они падают с различных пространственных направлений θ. Акустические сигналы IN имеют спектр частот, который изменяется во времени. Выходные сигналы преобразователя 1, S1(t, ω) и преобразователя 2, S2(t, ω) формируются в виде электрических сигналов на выходе преобразователей 1 и 2. Благодаря взаимному расстоянию р двух передатчиков 1 и 2, которое предпочтительно меньше 5 см, предпочтительно в пределах 0,5 и 1,5 см, в особенности для датчика в соответствии с изобретением, который является слуховым аппаратом для одного уха, и как показано с помощью двух соответствующих указательных схем, расположенных ниже функциональной блок-схемы (фиг.6), акустические сигналы IN падают на преобразователи 1 и 2 с задержкой dt во времени, которую можно выразить с помощью разности фаз Δϕω на каждой специальной частоте ω в виде
Δϕω = ω•dtω, где (1)
dtω = p/c cosθω. (2)
Если источник акустического сигнала IN является точечным источником, то задержка dtω во времени становится равной для всех спектральных компонент на частоте ω. Выходные сигналы S1 и S2 преобразователей 1 и 2 подсоединяются в рабочем состоянии к соответствующим входам блока 10 обнаружения временной задержки, который вырабатывает выходной сигнал А10, соответствующий спектральному распределению задержек dtω во времени, которые являются, как было объяснено выше, функцией от угла падения θ, под которым соответствующие частотные компоненты падают на преобразователи 1 и 2 и таким образом фактически под углом θω. На фиг.6 исключительно в качестве примера также показан возможный спектр выходного сигнала А10. Этот спектр изменяется во времени в соответствии с изменением времени падающего акустического сигнала IN. Выходной сигнал А10 блока 10 обнаружения временной задержки вводится в блок 12 взвешивания. Так как спектр dtω с соответствующими спектральными амплитудами А10 вводится в блок 12 взвешивания с предварительно выбранной переходной характеристикой W взвешивания, то в определенный момент времени в виде выходного сигнала А12 это приводит к спектральному сигналу W(ω), который также показан на фиг.6. А12 получают из соответствующего взвешивания спектральных амплитуд А10 в соответствии с характеристикой W. Как показывает А10 в соответствии с dtω, с какого направления θω падает каждая частотная компонента акустического сигнала IN, то ее специфическое взвешивание посредством функции W является нулевым по сравнению с предварительно определенным, в каком из направлений θω падения будет усиливаться или ослабляться этот сигнал. Таким образом, блок 12 взвешивания определяет со своей характеристикой W вид диаграммы направленности ("форму луча").
Выходной сигнал А12 поступает в блок 14 фильтрации с управляемой переходной характеристикой фильтрации. В нем каждая спектральная линия спектра, которая зависит от времени, выходного сигнала S1(t, ω) усиливается или ослабляется в соответствии с управляющим спектром Wω•A10ω. Таким образом, блок 14 является блоком фильтрации для входного сигнала S1, при котором изменяется переходная характеристика, которая управляется с помощью А12. В зависимости от вида блока 14 фильтра блок 12 взвешивания в общем случае производит вычисление регулировки характеристики фильтра, которые определяют коэффициенты в зависимости от А10.
Таким образом, вдоль каналов 10 и 12 определяют с помощью передаточных функций W взвешивания, на какие пространственные направления θ будут производиться "нацеливания". В блоке 14 фильтрации эта информация о формировании луча подается в электрический аналог S1 акустического сигнала IN, таким образом получая выходной сигнал Sr(t, ω), который представляет сформированный принятый сигнал.
С помощью регулировки передаточной функции W взвешивания за счет подачи сигнала Cw управления на вход C12 управления можно регулировать форму луча и, таким образом реализовать акустическое увеличение.
Как показано пунктирной линией, полезной может быть управляемая фильтрация, выполняемая в блоке 14, для двух выходных сигналов преобразователя.
На фиг. 7 показана первая предпочтительная форма реализации принципа изобретения (фиг. 6). Выходные сигналы S1 и S2 преобразуются первыми из аналоговой в цифровую форму в соответствующих аналого-цифровых преобразователях 16 и 17. Цифровые выходные сигналы соответствующих преобразователей 16 и 17 вводятся в соответствующие комплексные преобразователи 18 и 19 временной области в частотную область.
Выходные спектры S1(t, ω) и S2(t, ω) преобразователей 18, 19 вводятся в блок 10' обнаружения спектральной временной задержки. Блок 10' вычисляет в соответствии с формулой (1) спектр разности фаз Δϕω, разделенный на соответствующую частоту ω,, что приводит в результате к спектру А10' выходного сигнала в соответствии с временной задержкой dtω, как было объяснено со ссылкой на фиг.6. Выходной сигнал (А10') блока 10' обнаружения временной задержки дополнительно обрабатывается, как было объяснено со ссылкой на фиг.6, с помощью блока 12 фильтрации со взвешиванием и блока 14 с управляемой фильтрацией. В таблице приведены примеры того, как работает блок 10'. Из спектрально-фазового распределения ϕ1n сигнала S1 и ϕ2n сигнала S2 вычисляют временную задержку dtω для каждой спектральной линии в пределах интересующего спектрального диапазона (см.таблицу в конце описания).
Для того чтобы извлечь информацию о фазе ϕ из двух сигналов S1 и S2 блоков 18 и 19 преобразования временной области в частотную область, выполняют комплексную (действительную и мнимую) операцию.
Вторая предпочтительная форма реализации настоящего изобретения и особенно та, которая относится к реализации блока 10 обнаружения временной задержки, будет объяснена с помощью фиг.8 и 9.
Выходной сигнал одного из преобразователей, например преобразователя 1, S1(t, ω), подается в блок 20 временной задержки, в котором в первой форме этой реализации сигнал S1 задерживается во времени с помощью предварительно определенной, не зависящей от частоты временной задержки τ.
Таким образом, возвращаясь снова к фиг.1, сигнал S1 соответствует сигналу А1. Выходной сигнал блока 20 временной задержки таким образом соответствует сигналу А1 ' (фиг.1).
Сигнал временной задержки, соответствующий А1', накладывается на выходной сигнал S2(t, ω), который поступает из преобразователя 2 в блок 23 наложения, который соответствует блоку 3 (фиг.1), таким образом получая в результате выходной сигнал, соответствующий Ar(t, ω) (фиг.1). Как показано выше и как было объяснено со ссылкой на фиг.1, выходной сигнал Ar(t, ω) зависит от направления θ падения акустического сигнала, соответствующего лучу кардиоды первого порядка (фиг.2), функция кардиоды которого никогда не изменяется от частоты ω. Выходной сигнал Аr блока 23 наложения и, например, выходной сигнал S2(t, ω), который поступает из преобразователя 2, вводится в блок 25 выработки отношения, который является блоком сравнения.
Для понимания функционирования блока 25 для выработки отношения приводится ссылка на фиг.9. На фиг.9 показана характеристика ослабления кардиоды выходного сигнала Аr на специфической спектральной частоте ω1. Под специфически рассматриваемым углом θo падения выходной сигнал Аr блока 23 наложения представляет собой Aro(ω1) со значением амплитуды (показаны на фиг.9). Одновременно при этой рассматриваемой частоте ω1 и этим рассматриваемым углом θo падения амплитуда сигнала S2 равна A2o(ω1), которая также показана на фиг. 9. Следует подчеркнуть, что так как амплитуда А2о изменяется, то и пропорционально изменяется амплитуда Аro. Таким образом, отношение Аro к A2o (фиг. 9) показывает угол θo падения. В блоке 25 деления (фиг.8) для каждой амплитуды спектральной составляющей формируется отношение Аr к Аro, откуда получают спектр сигнала на выходе блока 25 деления со спектром отношения. Таким образом, спектр А10 (фиг.6) становится спектром отношения амплитуд, который тем не менее показывает угол θ падения, при котором каждая частотная составляющая спектра акустического сигнала падает по отношению к оси двух преобразователей (см. фиг.6). На фиг.8 блок, обозначенный пунктирной линией, показывает блок 10 обнаружения задержки (фиг.6). Дополнительная обработка сигнала выполняется, как было объяснено выше, посредством фиг.6, то есть через блок 12 взвешивания и блок 14 управляемой фильтрации.
В этом варианте осуществления можно выполнить преобразование временной области в частотную область на выходной стороне блока 12 сравнения.
Таким образом, выходной сигнал отношения блока 25 представляет собой измерение временной задержки dtω и вводится в блок 12 взвешивания.
На фиг. 10 показан график отношения Аr к А0 как функция от θ при специфической частоте ω1.
Это отношение амплитуд показано для τ в блоке 20 (фиг.8), которое выбирается равным
τ = p/c,
где р - расстояние между передатчиками 1 и 2 и с - скорость звука.
При выборе τ, равным р/с, и как видно из функции луча кардиоды (фиг.2), ослабление сигнала или затухание для θ, равным приблизительно 0o, становится очень высоким.
Таким образом, в этой области угла θ падения любой выбор шума в А2 согласно S2 (фиг.8) будет искажать результат сравнения, полученный в блоке 25. Эту проблему можно устранить с помощью выбора задержки τ, которая отличается и предпочтительно больше, чем р/с.
На фиг. 11 показан график результирующей кардиоды для τ =1,2 р/с, тогда как фиг. 12 показывает аналогично фиг.10 график амплитуды Аr, поделенной на амплитуду А2.
Кроме того, следует отметить, что функция кардиоды, которая показана на фиг.2, 9 и 11, является действительной только для одной рассматриваемой специфической частоты. Действительно, рассматривая различные частоты, кардиода изменяется так, как показано на фиг.13, на котором амплитуда А выходного сигнала блока 23 наложения (фиг.8) показана для р=12 мм, задержка τ =42 мс и для частот 0,5, 1, 2, 4 и 7,2 кГц. Из этого графика в полярных координатах хорошо видна функциональная зависимость частоты от усиления кардиоды. Хотя такой зависимостью можно пренебречь в первом приближении, в предпочтительной форме реализации способа изобретения необходимо, как показано на фиг.8, учитывать такую зависимость. Таким образом, предпочтительная форма реализации метода (фиг.8) показана на фиг.14. В этом случае те же самые позиции используются как и на фиг.7 и 8. Выходные сигналы преобразователей 1 и 2 преобразовываются в цифровую форму с помощью соответствующих аналого-цифровых преобразователей 16, 17, и результирующий цифровой сигнал преобразователя 1 зедерживается во времени на временную задержку τ, которая намного больше отношения р/с. Выходной сигнал S2 преобразователя 2 дополнительно преобразовывается в частотную область с помощью блока 18' преобразования линейного (некомплексного) времени в частотную область, тогда как выходной сигнал Аr блока 23 наложения преобразовывается в частотную область в блоке 19' преобразования линейного времени в частотную область. Частотная зависимость на графике в полярных координатах (фиг. 13) учитывается с помощью блока 30 нормализатора, который в действительности является фильтром. В первом варианте осуществления переходная характеристика фильтра выбирается пропорциональной 1/ω. Это приводит к частотной зависимости графика в полярных координатах, как показано на фиг.15, для тех же самых значений расстояния и частоты, как показано на фиг.13.
Видно, что хорошее согласование достигается для маленьких углов θ и частот вплоть до приблизительно 4 кГц. При частоте 4 кГц девиация (отклонение) составляет приблизительно 10% при θ = 0°.
Кроме того, даже улучшенная функция нормализации или характеристика фильтрации в блоке 30 (фиг.14) достигается в случае, когда характеристика фильтра выбирается в виде функции 1/sin(ω). Результат показан на фиг.16. Характеристики достаточно хорошо согласуются при частотах 0,5-4 кГц. Другим преимуществом этого метода нормализации является улучшенная чувствительность в обратном направлении. Эту улучшенную чувствительность можно использовать для формирования адаптированного луча, то есть для избирательного подавления источников шума с задней стороны.
Для специалистов очевидно, что такую нормализацию можно выполнить также при траектории сигнала 1-23 и/или 2-23.
В этом варианте осуществления (фиг.14) крайне предпочтительно, чтобы использовались только одномерные комплексные преобразователи 18',19' временной области в частотную область и некомплексные преобразователи, как и в варианте осуществления (фиг.7).
На фиг. 24 показано в виде блок-схемы, что сигнал A10(dtω) можно также выработать в качестве выходного сигнала блока 60 сравнения, в которой, с одной стороны, подается выходной сигнал из всенаправленного преобразователя 61, который имеет одинаковые коэффициенты усиления своей акустоэлектрической приемной характеристики по существу независимо от угла θ падения, и выходной сигнал из направленного преобразователя 62 с выбранной и сформированной диаграммой направленности приемной характеристикой. Согласно фиг.25, временную задержку τ можно выполнить непосредственно с помощью одного из преобразователей.
Тем самым в варианте осуществления (фиг.25), так же как и фиг.8, τ можно выбрать равным нулю.
С помощью фиг. 23 объясняется дополнительный предпочтительный вариант осуществления, особенно реализующий блок 10 обнаружения временной задержки (фиг. 6). Выходные сигналы преобразователей 1 и 2 первыми преобразуются с помощью соответствующих аналого-цифровых преобразователей 16 и 17 и затем с помощью соответствующих преобразователей 18, 19 временной области окончательно в частотную область. Один сигнал в качестве примера S2 преобразованных выходных сигналов преобразователей, которые после преобразования временной области в частотную область можно представить в виде спектра точек S2ω, преобразовывается в свои комплексно-сопряженные точки в блоке 50 преобразования. На выходе этого блока 50 вырабатываются комплексно-сопряженные точки S
Таким образом, мнимая часть указателя S3ω от S3 становится равной.
Ιμ (Σ3ω) = |S3ω|sin (Δϕω| (3)
Δϕω = ω•(p/c)•cos(θ) (4)
В соответствии с фиг.23, блок 53 преобразования формирует мнимую часть указателей S3ω, и дополнительно блок 54 формирует амплитуды |S3ω| этих указателей.
Для малых значений Δϕω синус в (3) можно аппроксимировать непосредственно с помощью Δϕω, так что в результате из (3) получают
Im(S3ω) = |S3ω•S
Таким образом и так как выполнено с помощью блока 55, деление мнимых частей Im (S3ω) указателей S3ω спектра S3 с помощью соответствующих значений скалярного произведения, соответствующего |S2ω|, приводит в результате к выходному сигналу, который соответствует Δϕω. Как уже объяснено с помощью фиг. 7, Δϕω дополнительно делят в блоке 56 на соответствующую частоту ω указателя. Полученный в результате сигнал равен А10 (фиг.6) или А10' (фиг. 7).
Все блоки 50, 52, 53, 54, 55 и 56 предпочтительно реализованы в одном блоке вычислителя.
Вернемся обратно к обобщенной блок-схеме фиг.6, описывающей различные возможности реализации блока 10 детектора задержки.
Посредством фиг. 17-22 дополнительно объяснено на специфическом примере эффект блока 12 амплитудной фильтрации и блока 14 управляемой фильтрации.
На фиг.17 показаны примеры двух характеристик сигналов взвешивания блока 12. Согласно характеристики I, каждая dtω амплитуда спектральной линии сигнала А10 (см. фиг.6) ослабляется до нуля, если такая амплитуда приходится ниже или выше предварительно определенных значений dtmin,ω, dtmas,ω и устанавливается равной "единица", если такая амплитуда спектральной составляющей находится в пределах этих двух значений.
Такой выбор функции W взвешивания приводит в результате к спектру A12 выходного сигнала, как показано на фиг.18а и 18b.
Фиг.18а и 18b понятны специалистам без дополнительного объяснения.
Фиг.19 показывает пример спектра сигнала S1. В блоке 14 управляемой фильтрации все спектральные линии S1(фиг.b) усиливаются на значение 1, соответствующее A12, или обнуляются соответственно до нулевого значения A12. В результате это приводит к спектру Sr (фиг.20) в качестве спектра выходного сигнала блока 14 управляемой фильтрации (фиг.6). Если функция I взвешивания (фиг.17) используется в методе, согласно фиг.7, то форма луча, который показан на фиг.21, выглядит в виде выделенных линий. Если используется амплитудная характеристика, как показано II на фиг.17, это приводит в результате к характеристике, которая показана на фиг.21 пунктирной линией.
На фиг. 22 показан результирующий луч, если по аналогии по фиг.17 и с точки зрения фиг.8 и 9, все значения отношений, которые превышают (А1/А2)mах, отбрасываются. Это реализовано с помощью амплитудной характеристики фильтра, которая также показана на фиг.22.
На фиг.22 отношение А1/А2 обозначено r(ω).
Специалистам ясно, что только примеры изобретения были описаны с помощью чертежей. Например, можно использовать более двух преобразователей или микрофонов, расположенных линейно, на плоскости или в виде пространственной матрицы. Кроме того, вместо всенаправленных микрофонов можно использовать однонаправленные. Формирование луча в соответствии с изобретением можно также выполнить с помощью комбинаций функций из двух или более микрофонов. Специалистам будет также ясно, что можно реализовать детектор с задержкой многими другими способами. Кроме того, нормализацию, которая была объяснена с помощью блока 30 нормализатора (фиг.14), можно легко сделать при осуществлении преобразования временной области в частотную область только после аналого-цифровых преобразователей 16 и 17 и выполнения частотных специфических матриц или таблиц временных задержек τω.о
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРОСТРАНСТВЕННО ИЗБИРАТЕЛЬНОГО ПОЛУЧЕНИЯ ЗВУКА С ПОМОЩЬЮ АКУСТИЧЕСКОЙ ТРИАНГУЛЯЦИИ | 2011 |
|
RU2559520C2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| СПОСОБ АКУСТИЧЕСКОГО ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ ДЛЯ ПОЛЬЗОВАТЕЛЕЙ | 2012 |
|
RU2523340C2 |
| УЛУЧШЕНИЕ СИГНАЛА ВЕКТОРА БЛИЖНЕГО ПОЛЯ | 2007 |
|
RU2434262C2 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ АКУСТИЧЕСКОГО ЭХА И ФРОНТАЛЬНОЕ УСТРОЙСТВО КОНФЕРЕНЦСВЯЗИ | 2009 |
|
RU2520359C2 |
| АКУСТИЧЕСКАЯ ИСПЫТАТЕЛЬНАЯ СИСТЕМА | 1993 |
|
RU2057401C1 |
| УСТРАНЕНИЕ ПОЗИЦИОННОЙ НЕОДНОЗНАЧНОСТИ ПРИ ФОРМИРОВАНИИ ПРОСТРАНСТВЕННОГО ЗВУКА | 2009 |
|
RU2529591C2 |
| АКУСТИЧЕСКИЙ ТЕЧЕИСКАТЕЛЬ | 2009 |
|
RU2403546C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ АКУСТИЧЕСКИХ СИГНАЛОВ ЭМИССИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2610568C1 |
Изобретение относится к акустике, конкретно к методу формирования луча по акустическим сигналам. Предварительно определенная характеристика усиления между электрическим приемным сигналом Sr и акустическими сигналами в зависимости от направления θ, с которого поступают указанные акустические сигналы в два разнесенных по пространству акустоэлектрических преобразователя 1,2, формируется таким образом, что повторный взаимно задержанный сигнал А10 определяется из выходных сигналов преобразователей и в соответствии с принятой задержкой преобразователя. При этом один S1 из выходных сигналов фильтруется таким образом, что переходной характеристикой фильтрации управляют в зависимости от взаимно задержанного сигнала A12. Выходной сигнал фильтрации 14 используется в качестве электрического принимаемого сигнала Sr. В результате устройство, выполненное с учетом данных преобразований, обладает хорошей частотной характеристикой, может быть выполнено небольших размеров, а также с высоким отношением сигнал/шум. 2 с. и 28 з.п. ф-лы, 26 ил., 1 табл.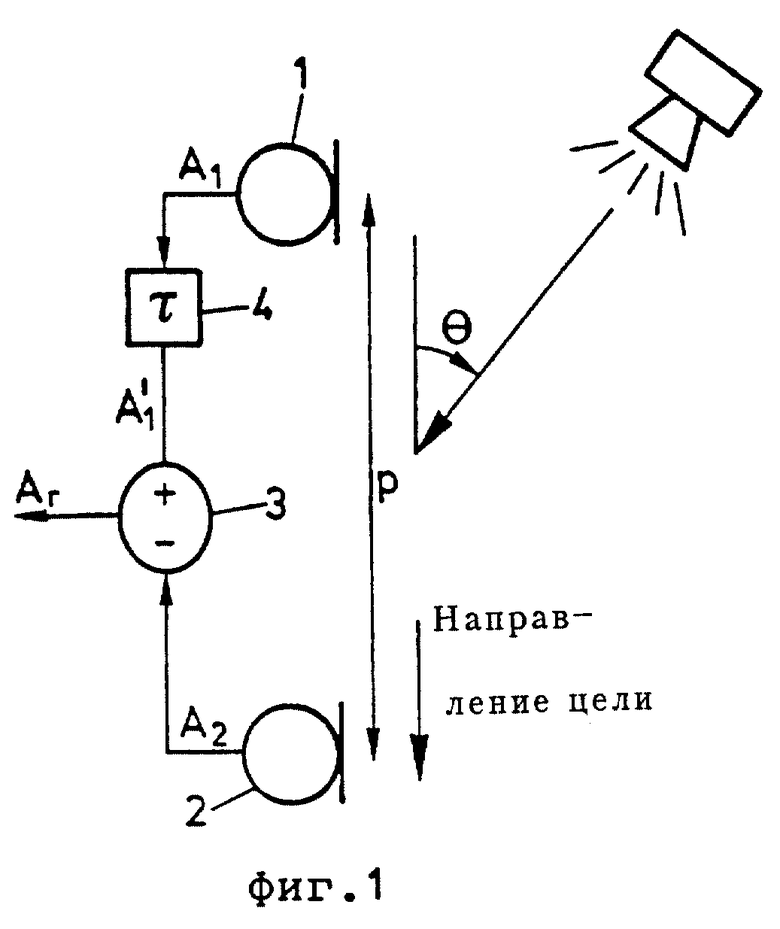
| Двухтактный усилитель мощности | 1975 |
|
SU652686A1 |
| THE JOURNAL OF THE ACOUSTICAL SOCIETY OF AMERICA, v | |||
| Огнетушитель | 0 |
|
SU91A1 |
| АКУСТИЧЕСКИЙ ДАТЧИК ПОЛОЖЕНИЯ ГРАНИЦЫ РАЗДЕЛА ДВУХ СРЕД В ТРУБЕ | 1990 |
|
RU2036439C1 |
| 0 |
|
SU289401A1 | |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |

