Изобретение относится к измерительной технике и может быть использовано в информационных системах и различных устройствах автоматики для измерения угловых перемещений объек- тов, установленных на вращающемся валу.
Целью изобретения является повышение функциональной надежности и расширение диапазона преобразования угловых перемещений за счет устранения неоднозначности отсчета индукционных датчиков перемещения растрового типа.
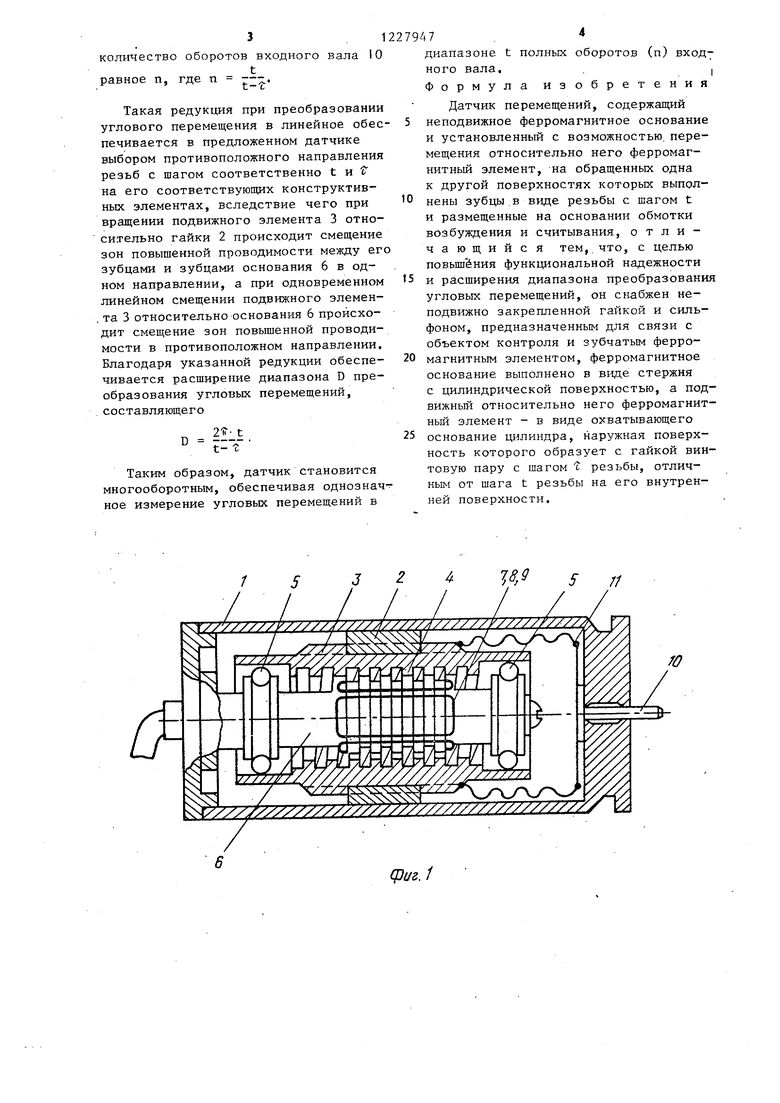
На фиг.1 показана конструкция дат чика; на фиг.2 - комбинационно-растровое сопряжение зубцовых зон ферромагнитного основания и поДв1жкного элемента датчика (в развертке) и размещение его обмоток, .
Датчик перемещений содер;кит кор™ .пус 1, в котором жестко закреплена гайка 2, имеющая шаг € резьбы и образующая винтовую пару с наружной поверхностью подвижного ферромагнитного элемента 3, имеющего на внутренней поверхности зубцы 4. Эти зубцы образованы винтовой резьбой с DiaroM отличным от шага 1 винтовой парьи Подвижный ферромагнитный элемент 3 выполнен в виде цилиндра, опирающегося на подшипники 5 и охватываюпдего неподвижное ферромагнитное основа- ние 6, выполненное в виде стержня с цилиндрической поверхностью, на ко-, торой также образованы зубцы в виде резьбы с тем же шагом t, На том же основании выполнены еще продольные канавки, в которые уложены петлеобразные секции обмотки 7 возбуждения и обмоток 8 и 9 считывания, образующих двухфазную систему выходных сигналов. Благодаря винтовому зацеплению подвижного элемента 3 с гайкой 2 и его опоре на подшипники 5 подвижный элемент- 3 имеет возможност совершать как линейные, так и угловые перемещения относительно основания 6 датчика. Передача движения от объекта контроля (не показа.н) к подвижному элементу 3 датчика осуществляется от входного вала 10 через сильфон 11, который позволяет выбрать осевой люфт в винтовой паре гайка 2 подвижн ый элемент 3, В результате вращательное перемещение объекта контроля преобразуется в линейное перемещение зубчатого ферромагнитног
5
. i 0
0
0
S
подвижного элемента 3 относительно зубчатого основания 6 датчика с обмотками 7-9,
Датчик перемещений работает следующим образом.
Вращение вала 10, передаваемое через сильфон 11 к подвижному зубчатому элементу 3 датчика, приводит к линейному перемещению этого элемента относительно ферромагнитного основания 6 с размещенными на нем обмотками возбуждения и считывания и относительно гайки 25 неподвижно закрепленных в корпусе 1, Благодаря тому, что шаг t резьбы винтовой пары отличается от шага t резьбы,образующей зубцы на обращенных одна к другой поверхностях подвижного элемента 3 и основания 6 датчика, отделенных воздушным зазором, а направление этих резьб противоположно, результирующее линейное смещение д элемента 3 относительно основания 6 равно д t- при каясдом повороте вала 10, а следовательно, и подвижного элемента 3 на один полный оборот, При линейном пе- ремеш,ении подвижного элемента 3 относительно основания 6 происходит смещение зон повьш1енной магнитной проводимости j, показанных штриховкой на фиг,2 и соответствующих площади взаимного перекрытия зубцов подвижного элемента 3 и основания .6, которая изменяется в функпии углового положения вала 10б Изменение магнитной проводимости участков магнитопровода, охваченных обмотками 7-9 возбуждения и считывания , в функции угла поворота вала 10J приводящего к линейному смещению подвижного элемента 3 датчика, обуславливает соответствующее изменение потокосцештения обмоток воз- б улсдения и считы:вания,а следователь- HOg и изменение огибающих выходных ЭДС датчика, получаемых в рассмотренном двухфазном варианте исполнения датчика на выводах,пространственно смещенных на 90 обмоток 8 и 9 счи- тьшаниЯо
Смещение подвижного элемента 3 датчика на полный шаг t резьбы (зубцов) относительно основания 6 обеспечивает полньш период изменения выходных ЭДС датчика за счет соответствующей периодичности изменения пло- атади зон повьш1енной магнитной проводимости. Полному периоду изменения выходных ЭДС датчика соответствует
количество оборотов входного вала 10 равное п, где п --,
Такая редукция при преобразовании углового перемещения в линейное обеспечивается в предложенном датчике выбором противоположного направления резьб с шагом соответственно t и t на его соответствующих конструктивных элементах, вследствие чего при вращении подвижного элемента 3 относительно гайки 2 происходит смещение зон повыщенной проводимости между его зубцами и зубцами основания 6 в одном направлении, а при одновременном линейном смещении подвижного элемен- , та 3 относительно основания 6 происходит смещение зон повышенной проводимости в противоположном направлении. Благодаря указанной редукции обеспечивается расширение диапазона D преобразования угловых перемещений, составляющего
.,.
Таким образом, датчик становится многооборотным, обеспечивая однозначное измерение угловых перемещений в
10
27947,
диапазоне t полных оборотов (п) входного вала. Формула изобретения
Датчик перемещений, содержащий неподвижное ферромагнитное основание и установленный с возможностью, перемещения относительно него ферромагнитный элемент, на обращенных одна к другой поверхностях которых выполнены зубцы .в виде резьбы с шагом t и размещенные на основании обмотки возбуждения и считывания, отличающийся тем, что, с целью повьш ёния функциональной надежности 5 и расширения диапазона преобразования угловых перемещений, он снабжен неподвижно закрепленной гайкой и силь- фоном, предназначенным для связи с объектом контроля и зубчатым ферромагнитным элементом, ферромагнитное основание выполнено в виде стержня с цилиндрической поверхностью, а подвижный относительно него ферромагнит- ньш элемент - в виде охватывающего основание цилиндра, наружная поверхность которого образует с гайкой винтовую пару с шагом t резьбы, отличным от шага t резьбы на его внутренней поверхности.
20
25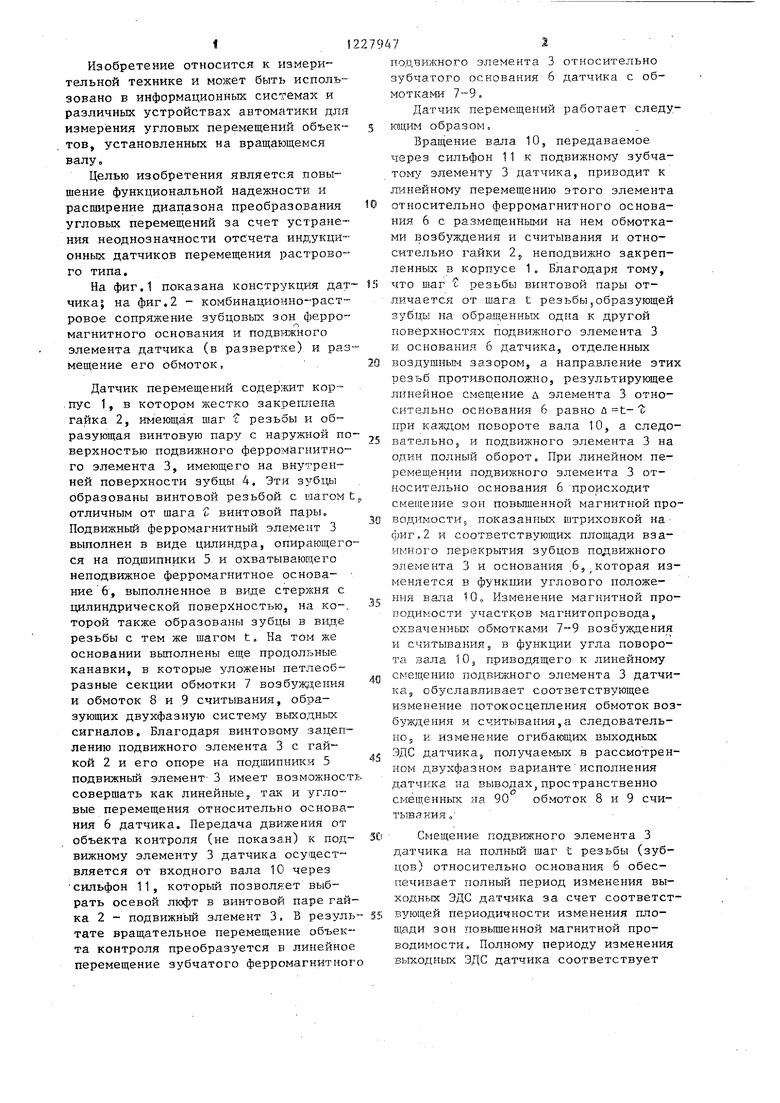
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| Преобразователь перемещений | 1982 |
|
SU1019220A1 |
| РАСТРОВЫЙ ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2334948C1 |
| МНОГООБОРОТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2187071C2 |
| Бесконтактный синусно-косинусный преобразователь перемещения | 1982 |
|
SU1147924A1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU866660A2 |
| Бесконтактный датчик скорости | 1985 |
|
SU1312694A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2326446C1 |
| Индукционный редуктосин | 1982 |
|
SU1069081A1 |
| Преобразователь угловых перемещений | 1984 |
|
SU1226034A1 |
Изобретение относится к измерительной технике и позволяет повысить функциональную надежность и расширить диапазон преобразования угловых перемещений за счет устранения неоднозначности отсчета индукционных датчиков перемещения растрового типа. Датчик перемещения содержит неподвижное ферромагнитное основание и подвижный относительно него ферромагнитный элемент, выполненные в виде цилиндрического стержня и охватывающего его цилиндра, на обращенных одна , к другой поверхностях которых выполнены зубцы в виде резьбы с шагом t. Наружная поверхность подвижного элемента снабжена резьбой с другим шагом t и другим направлением нарезки, образующим с неподвижно закрепленной в корпусе гайкой винтовую пару. Подвижный элемент связан с входным валом, на котором устанавливается контролируемый объект, через сильфон, обеспечивающий выбор осевого люфта в винтовой паре. При вращении входного вала вращательное движение подвижного элемента, благодаря неподвижно закрепленной гайке, преобразуется в поступательное перемещение этого элемента относите тьно основания, на котором в продольных канавках уложены петлевые секции обмоток возбуждения и считывания. Вследствие изменения площади зон перекрытия зубцов основания и подвижного элемента обеспечивается пространственная модуляция выходных ЭДС, наводимых в обмотках считывания, образующих двухфазную систему ЭДС. .Амплитуда ЭДС является функцией углового положения входного вала. Благодаря редукции в винтовой паре обеспечивается расширение диапазона преобразования угловых перемещений с однозначностью отсчета. 2 ил. (Л ю со 4 
Н S
п
сриг.1
Фиг. I
Редактор Т.Парфенова
Составитель С.Скрыпник Техред И.Верес
Заказ 2280/42Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35р Раушская наб, Д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Пожо
| Преобразователь перемещений | 1982 |
|
SU1019220A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещений | 1978 |
|
SU769307A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
