Изобретение относится к области гироприборостроения и может быть использовано в навигационных системах на базе трехосных гиростабилизаторов.
Известен морской гироазимутгоризонткомпас ГАГК-1, который может работать в инерциальном режиме или режиме гироазимутгоризонткомпаса [см. "Технические средства судовождения", том II /под общей редакцией Е.Л. Смирнова, изд. Элмор, г. С-Петербург, 2000 г., стр. 347]. Для реализации этих режимов работы необходимо осуществить приведение (выставку) платформы ГАГК в меридиан и горизонт с требуемой точностью.
Гироазимутгоризонткомпас ГАГК-1 содержит гиросекцию - трехосный гиростабилизатор, на платформе которого установлены два трехстепенных гироскопа и два однокомпонентных акселерометра с горизонтальными осями чувствительности, а по осям карданова подвеса установлены датчики углов качек и курса, при этом выходы акселерометра связаны с первым и вторым, а выходы датчиков углов качек и курса - с третьим, четвертым и пятым выходами гиростабилизатора; а датчики момента гироскопов, управляющих движением платформы гиростабилизатора вокруг горизонтальных и вертикальной осей, связаны со вторым, третьим и первым входами гиростабилизатора; электронный блок, первый и второй входы которого связаны через первый и второй выходы гиростабилизатора с выходом акселерометров, третий и четвертый входы связаны с лагом и блоком ввода широты; пятый и шестой входы связаны с первым и вторым выходом таймера, вырабатывающим сигналы окончания режимов горизонтирования и приведения, а первый, второй и третий выходы электронного блока, вырабатывающего сигналы управления платформой гиростабилизатора вокруг вертикальной и горизонтальных осей, связаны через первый, второй и третий входы гиростабилизатора с датчиками момента гироскопов.
Для приведения (выставки) в данном гироазимутгоризонткомпасе используются два режима: горизонтирования и приведения, переключаемых таймером через заданные интервалы времени.
Наиболее длительным этапом является режим приведения в меридиан, реализуемый по схеме гироазимутгоризонткомпаса с максимальными сигналами управления ΩE, ΩN, ΩZ. При этом время приведения в меридиан с требуемой точностью увеличивается с ростом начального отклонения от меридиана и достигает максимума при начальном угле рассогласования 180o. Поэтому в этом и подобных гироазимутгоризонткомпасах для обеспечения приведения в меридиан с требуемой точностью с любого начального угла длительность режима приведения устанавливается максимальной и равной длительности приведения с начального угла 180o. На процесс выставки в меридиан и горизонт влияют также гармонические ускорения от качки объекта, увеличивающие его время приведения.
Так, в этом гироазимутгоризонткомпасе время приведения в меридиан с точностью 1o составляет 30-45 минут, а с точностью 0,1o - 4 часа. В других гироазимутгоризонткомпасах, имеющих менее мощные датчики момента, время приведения существенно больше.
Целью изобретения является сокращение времени приведения ГАГК с требуемой точностью в условиях качающегося объекта.
Поставленная цель достигается тем, что в состав гироазимутгоризонткомпаса, содержащего трехосный гиростабилизатор, на платформе которого установлены два трехстепенных гироскопа и два однокомпонентных акселерометра с горизонтальными осями чувствительности, а по осям карданова подвеса установлены датчики углов качек и курса, при этом выходы акселерометров связаны с первым и вторым, а выходы датчиков углов качек и курса - с третьим, четвертым и пятым выходами гиростабилизатора, а датчики момента гироскопов, управляющие движением платформы вокруг горизонтальных и вертикальной осей связаны со вторым, третьим и первым входами гиростабилизатора; и электронный блок, первый и второй входы которого связаны через первый и второй выходы гиростабилизатора с выходами акселерометров, третий и четвертый входы связаны с лагом и блоком выработки широты, пятый и шестой входы связаны с выходами таймера и третьего блока сравнения соответственно, а первый, второй и третий выходы электронного блока, вырабатывающего сигналы управления платформой гиростабилизатора вокруг вертикальной и горизонтальных осей, связаны через первый, второй и третий входы гиростабилизатора с датчиками момента гироскопов, дополнительно вводят последовательно соединенные сумматор, интегратор, первый масштабирующий блок, ключ, блок задержки, блок выделения модуля, третий масштабирующий блок и первый блок сравнения, а также первый и второй счетчики, второй и третий блоки сравнения и второй масштабирующий блок. При этом первый вход сумматора связан через первый выход гиростабилизатора с выходом акселерометра, а второй вход сумматора через второй масштабирующий блок связан с выходом первого масштабирующего блока; управляющий вход ключа связан с выходом таймера, второй вход третьего масштабирующего блока связан с выходом блока выработки широты, первый выход первого блока сравнения связан со вторым входом второго счетчика и через первый вход первого счетчика и третий блок сравнения с шестым входом электронного блока, а второй выход первого блока сравнения связан через первый вход второго счетчика и второй блок сравнения со вторым входом первого счетчика.
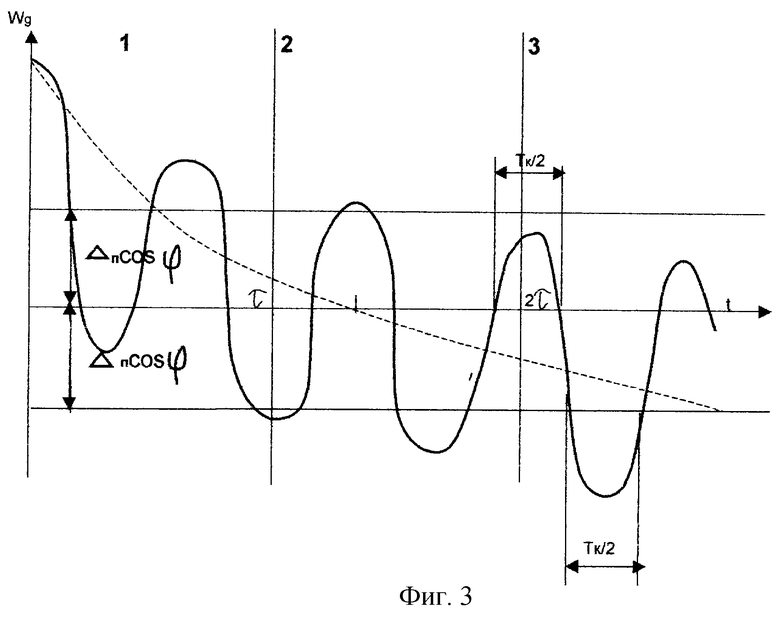
Устройство ГАГК, представленное на фиг.1, включает:
1 - трехосный гиростабилизатор, на платформе которого установлены два трехстепенных гироскопа H1, и Н2 (или три двухстепенных гироскопа H1, Н2, Н3) и два однокомпонентных акселерометра АE, АN с горизонтальными осями чувствительности, а по осям карданова подвеса установлены датчики углов качек DΨ, DQ и курса DK. Выходы акселерометров связаны с 1 и 2, а выходы датчиков качек и курса с 3, 4 и 5 выходами гиростабилизатора. Датчики момента гироскопов (H1 и H2), управляющие движением платформы гиростабилизатора вокруг ее горизонтальных Х(Е), Y(N) и вертикальной Z осей, связаны со 2, 3, 1 входами гиростабилизатора;
2 - электронный блок, 1 и 2 входы которого связаны через 1 и 2 выходы гиростабилизатора с выходами WN, WE акселерометров, 3 и 4 входы связаны с лагом V1 и с числителем широты или блоком ввода широты ϕ, пятый и шестой входы связаны с выходом таймера 3 и третьего блока сравнения 14 соответственно, а первый, второй, третий выходы подают сигналы управления платформой ΩZ, ΩE, ΩN через 1, 2 и 3 входы гиростабилизатора 1 на датчики момента гироскопов.
Электронный блок представляет собой схему управления, реализуемую на аналоговых или цифровых элементах и вырабатывающую по информации акселерометров WE, WN, лага V1 и широты ϕ сигналы управления гиростабилизатором ΩZ, ΩE, ΩN;
3 - таймер. После включения ГАГК начинается режим горизонтирования, который заканчивается через заранее определенный интервал времени по сигналу 1 таймера 3; начинается режим приведения (выставки) платформы ГАГК в меридиан, который заканчивается после выработки третьим блоком сравнения 14 сигнала окончания приведения 2; начинается рабочий режим, при котором отклонение платформы от меридиана и плоскости горизонта не превышает требуемых допустимых значений;
4 - сумматор, первый вход которого связан с первым выходом гиростабилизатора, т. е. с сигналом WN, а второй - с выходом второго масштабирующего блока 7;
5 - интегратор, реализуемый на базе аналоговых или цифровых микросхем;
6, 7, 11 - масштабирующие блоки с коэффициентами передачи Кф, "-1" и 1/cosϕ соответственно, реализуемые на базе аналоговых или цифровых элементов;
8 - ключ, передающий сигнал Wg, после прихода на его управляющий вход сигнала 1 с таймера 3, реализуемый на базе электромагнитного реле или логических цифровых микросхем;
9 - блок задержки на время t3, реализуемый на базе цифровых микросхем;
10 - блок выделения модуля входного сигнала Wg, реализуемый на базе цифровых логических микросхем;
12 - первый блок сравнения, первый выход которого связан с первым входом первого и вторым входом второго счетчика (13, 15), реализуемый на аналоговых или цифровых элементах, выдающий сигнал по первому выходу в случае, если сигнал |Wg|/cosϕ<2Δп (порогового значения) и по второму выходу, если |Wg|/cosϕ>2Δп;
13, 15 - первый и второй счетчики, первые входы которых запускают счетчики, а вторые входы обнуляют выходы;
14, 16 - третий и второй блоки сравнения. Второй блок вырабатывает выходной сигнал для обнуления первого счетчика 13, если выполняется условие t2>tn2 (tn2 - заранее установленный порог). Третий блок сравнения 14 выдает сигнал 2 завершения режима приведения (выставки) в случае выполнения условия t1>tn1 (tn1 - заранее установленный порог). Блоки сравнения могут быть реализованы на аналоговых или цифровых элементах.
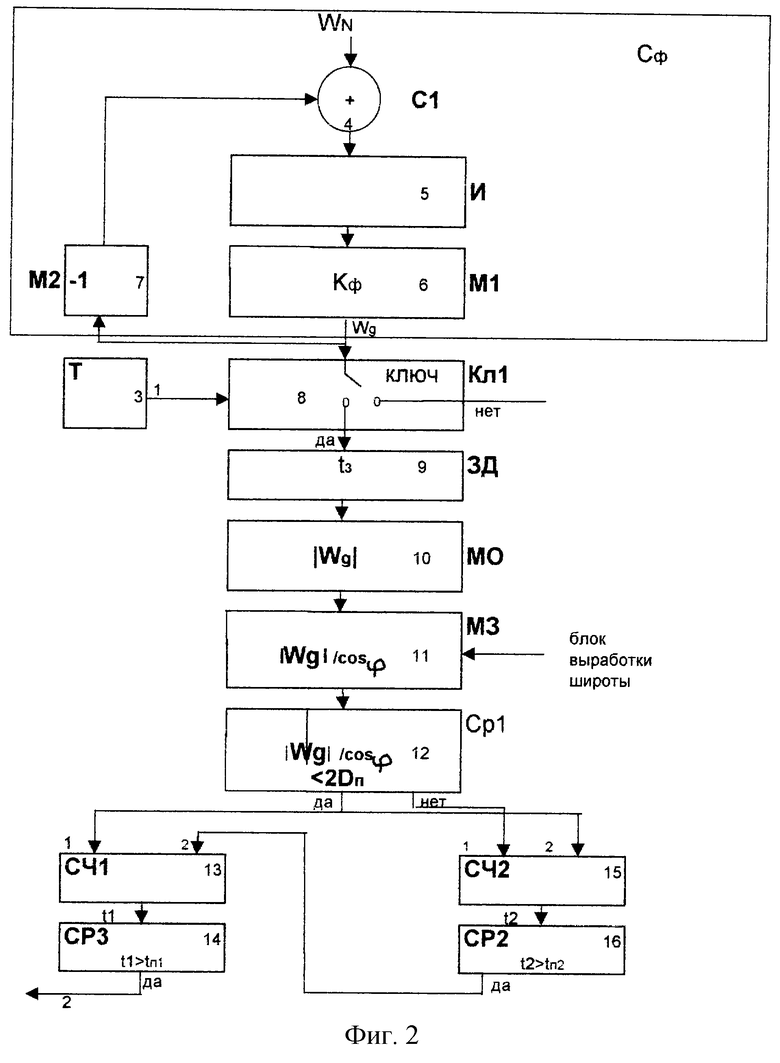
Вводимые в состав ГАГК элементы могут быть реализованы как в составе схемы управления или вычислителя электронного блока, так и в виде отдельного, дополнительного электронного блока или дополнительного вычислителя. Алгоритм автоматической выработки сигнала завершения приведения (выставки), реализуемый вводимыми в ГАГК элементами, представлен на фиг.2, где:
Сф - сглаживающий фильтр;
3(Т) - таймер;
4(С1) - сумматор;
5(И) - интегратор;
6(М1) - первый масштабирующий блок;
7(М2) - второй масштабирующий блок;
8(Кл1) - ключ;
9(ЗД) - блок задержки;
10(МО) - блок формирования модуля;
11(М3) - третий масштабирующий блок;
12(СР1) - первый блок сравнения;
13(СЧ1) - первый счетчик;
14(СР3) - третий блок сравнения;
15(СЧ2) - второй счетчик;
16(СР2) - второй блок сравнения.
Поясним достижение поставленной цели предлагаемым устройством, реализующим указанный алгоритм автоматической выработки сигнала завершения приведения (выставки) следующим теоретическим анализом, расчетами и результатами экспериментальных испытаний опытного образца ГАГК.
Уравнения движения гироазимутгоризонткомпаса в режиме приведения (выставки) у пирса, когда постоянная времени переходного процесса режима приведения ГАГК больше, чем период качки, описывающие отклонения (ошибки) β и α платформы относительно восточной оси и вертикальной оси соответственно, могут быть записаны в виде

U1=0,
где U2 = U•cosϕ, U3 = U•sinϕ - угловые скорости географического трехгранника в проекции на восточную, северную, вертикальную оси;
U - скорость Земли.
Угловые скорости управления по восточной и вертикальной оси платформы гиростабилизатора
ΩE = -(K1•WN)/R
ΩZ = U•sinϕ+(K2•WN)/(R•cosϕ).
Сигнал с северного акселерометра
WN = g•β
g - ускорение силы тяжести,
U - скорость Земли,
R - радиус Земли,
ϕ - широта места, вводимая в ГАГК,
К1, К2 - коэффициенты цепей управления.
После подстановки выражений для управляющих скоростей в уравнения движения последние примут вид ,
, .
.
В установившемся режиме при  отклонение платформы βy вокруг восточной оси будет определяться ее текущим отклонением от меридиана α, т.е. невыставкой по курсу
отклонение платформы βy вокруг восточной оси будет определяться ее текущим отклонением от меридиана α, т.е. невыставкой по курсу
βy = α•(U•cosϕ)/ν2•K1),
где ν2 = g/R - частота Шулера.
Соответственно сигнал с северного акселерометра также зависит от ошибки приведения в меридиан α
WN = g•βy = -α•(R•U•cosϕ)/K1.
В переходном режиме угол (отклонение) β и сигнал WN определяются дифференциальным уравнением, которое получается из последней системы .
.
Выбирая
K1 = 2•a/ν2U; K2 = a2/ν2•U,
где a = 1/τ(τ - постоянная времени переходного процесса ГАГК),
можно записать частное решение β4 дифференциального уравнения в виде
β4 = β0•e-a·t,
где β0 - начальное отклонение вокруг восточной оси, равное конечному βK значению в режиме горизонтирования
β0 = βK = (U•cosϕ•sinα)KГ,
где КГ - коэффициент в режиме горизонтирования.
Итак, общее решение дифференциального уравнения, описывающее изменение угла β в режиме приведения ГАГК, имеет вид
β = β4+βy = β0•e-a·t+βy..
Сигнал Wg после представленного на фиг.2 сглаживающего фильтра Сф с коэффициентом Кф и постоянной времени фильтра ТФ=1/Кф при действии ускорения качки Wк = W0•g•sinωкt с амплитудой W0 и периодом качки Тк в режиме приведения определяется, как будет показано ниже, дифференциальным уравнением
Wк = W0•g•sin(ωк•t),
где ωК - угловая скорость качки.
Полагая Tк<Tф<τ(ωк = 2•π/Tк>aф = 1/Tф>a = 1/T) и пользуясь принципом суперпозиции, найдем решение последнего дифференциального уравнения в виде суммы трех составляющих:
W1 = A•e-a·t,
W2=B,
W3 = C•sin(2•π/Tк)+Д•cos(2•π•t/Tк).
После их поочередной подстановки в дифференциальное уравнение и определения коэффициентов А, В, С, Д основная составляющая сигнала Wy после сглаживающего фильтра может быть записана в виде
Первая составляющая, определяющая переходный процесс в режиме приведения из-за начальных условий α с постоянной времени τ = 1/a затухает со временем, пропорциональным отклонению от меридиана α.
Вторая составляющая, определяющая установившееся значение сигнала  пропорциональна отклонению от меридиана α.
пропорциональна отклонению от меридиана α.
Третья составляющая, зависящая от амплитуды W0 гармонического или периодического ускорения качки при указанном условии ωк>aф = Kф, может быть записана в виде
W0•g•K
Выберем коэффициент сглаживающего фильтра Кф так, чтобы при максимальном ускорении качки W0m и соответствующей ему угловой скорости качки ωк = 2•π/Tк амплитуда гармонической составляющей сигнала Wg была бы равна допустимой ΔП - установившейся составляющей, определенной требуемым допустимым углом отклонения от меридиана 

тогда 
Оценим величину Кф, полагая Тк= 6 с, К1=3000 рад/с, что типично для современных морских систем
Тк= 6 с, К1=3000 рад/с, что типично для современных морских систем
Тф = 25 с.
При выборе Kф в соответствии с выражением (2) график функции Wg(t) в режиме приведения (выставки) имеет вид, представленный на фиг.3.
На фиг. 3 пунктирной линией обозначена сумма первых двух составляющих сигнала Wg.
Работа предлагаемого устройства в соответствии со структурой алгоритма выработки сигнала завершения выставки, представленной на фиг.2. и графиком на фиг.3, происходит следующим образом. Сигнал северного акселерометра AN с первого выхода гиростабилизатора ГАГК подается на первый вход первого сумматора 4(С1). На второй вход сумматора 4(С1) подается сигнал Wg с выхода сглаживающего фильтра с обратным знаком. Суммарный сигнал через интегратор 5(И) и первый масштабирующий блок 6(М1) поступает на вход ключа 8(КЛ1). Уравнение такого фильтра может быть записано в виде
Wg = Kф•∫(WN-Wg)dt.
Тогда сигнал Wg зависит от WN в соответствии с выражением
где Тф = 1/Кф,
т. е. элементы 5(И), 6(М1), 7(М2), 4(С1) представляют собой апериодическое звено с постоянной времени Тф или сглаживающий фильтр (СФ) по отношению к входному сигналу WN. После окончания режима горизонтирования таймер 3 (Т) включает ключ 8 (КЛ1) и сигнал Wg после сглаживающего фильтра с выбранным в соответствии с выражением (2) коэффициентом Кф попадает на блок задержки 9 (ЗД), который через время t3 подает его на блок формирования модуля 10 (МО), который определяет модуль сигнала Wg. Задержка t3 нужна для реализации приведения с угла α, близкого к 180o в районах, близких к экватору при ϕ≈0, когда начальное значение сигнала  В этом случае сигналы βy и Wgy, определяемые отклонением от меридиана α, будут увеличиваться в зависимости от азимутального дрейфа r и для предотвращения ранней выработки сигнала 2, пока угол α не отработается от значения 180o до
В этом случае сигналы βy и Wgy, определяемые отклонением от меридиана α, будут увеличиваться в зависимости от азимутального дрейфа r и для предотвращения ранней выработки сигнала 2, пока угол α не отработается от значения 180o до  , необходимо задержать анализ величины Wg до момента, пока Wg не превысит величину ΔП, т.е. пока угол α не превысит величину α. Время tз определяется из соотношения
, необходимо задержать анализ величины Wg до момента, пока Wg не превысит величину ΔП, т.е. пока угол α не превысит величину α. Время tз определяется из соотношения
Для типичных у морских систем величин r=0.01o/ч,  , значение tз составит 100 с. В третьем масштабирующем блоке, второй вход которого связан с четвертым входом схемы управления, формируется сигнал
, значение tз составит 100 с. В третьем масштабирующем блоке, второй вход которого связан с четвертым входом схемы управления, формируется сигнал  по информации о широте, поступающей от блока выработки широты. В первом блоке сравнения осуществляется сравнение сигнала
по информации о широте, поступающей от блока выработки широты. В первом блоке сравнения осуществляется сравнение сигнала  с двойным допустимым значением
с двойным допустимым значением  подбираемым заранее по заданной величине допустимого отклонения от меридиана
подбираемым заранее по заданной величине допустимого отклонения от меридиана  в соответствии с выражением (1). Если сигнал
в соответствии с выражением (1). Если сигнал  то включается второй счетчик 15 (СЧ2), и время t2 начинает вырабатываться и поступать во второй блок сравнения 16 (СР2) для сравнения с порогом tn2=Ткm/2, выставленным заранее и равным половине максимального периода качки Ткm. При этом в соответствии с графиком на фиг.3 возможны две ситуации:
то включается второй счетчик 15 (СЧ2), и время t2 начинает вырабатываться и поступать во второй блок сравнения 16 (СР2) для сравнения с порогом tn2=Ткm/2, выставленным заранее и равным половине максимального периода качки Ткm. При этом в соответствии с графиком на фиг.3 возможны две ситуации:
либо  и платформа находится в зоне 1;
и платформа находится в зоне 1;
либо  и платформа находится в зоне 3, но ускорение качки вызвало превышение сигнала Wg над 2ΔП на время t≤Tк/2, где Тк - период качки.
и платформа находится в зоне 3, но ускорение качки вызвало превышение сигнала Wg над 2ΔП на время t≤Tк/2, где Тк - период качки.
В первом случае t2>tn2 и блокирующий выход 2-го блока сравнения обнуляет время t1 первого счетчика 13 (СЧ1), предотвращая выработку сигнала 2. Во втором случае t2<tn2 и выработка блокирующего сигнала не производится. Если  то включается счетчик 13 (СЧ1) и обнуляется время t2 счетчика 15 (СЧ2). Время t1 со счетчика 13 (СЧ1) поступает на сравнение с порогом tn1 в третий блок сравнения, выставляемый заранее и равный постоянной времени режима приведения τ = 1/a.
то включается счетчик 13 (СЧ1) и обнуляется время t2 счетчика 15 (СЧ2). Время t1 со счетчика 13 (СЧ1) поступает на сравнение с порогом tn1 в третий блок сравнения, выставляемый заранее и равный постоянной времени режима приведения τ = 1/a.
При этом в соответствии с графиком, приведенным на фиг.3, возможны две ситуации:
либо  и платформа находится в зоне 2;
и платформа находится в зоне 2;
либо  и платформа находится в зоне 3.
и платформа находится в зоне 3.
В первом случае, хотя сигнал  но переходный процесс в режиме приведения не закончился и через время t1<τ величина
но переходный процесс в режиме приведения не закончился и через время t1<τ величина  может выйти за пределы допуска 2ΔП. Поэтому блок сравнения 14 (СР3) осуществляет сравнение времени t1 с постоянной времени τ, и пока t1<τ предотвращается выработка сигнала 2.
может выйти за пределы допуска 2ΔП. Поэтому блок сравнения 14 (СР3) осуществляет сравнение времени t1 с постоянной времени τ, и пока t1<τ предотвращается выработка сигнала 2.
Во втором случае t1>tn1 = τ, платформа отклонена от меридиана на угол, меньший допустимого, и вырабатывается сигнал 2 на включение рабочего режима ГАГК.
Таким образом, после окончания переходного процесса, время которого тем меньше, чем меньше начальное отклонение от меридиана α, когда отклонение от меридиана становится меньше требуемого допустимого значения  значение сигнала
значение сигнала  становится меньше допустимого порога 2ΔП, и автоматически вырабатывается сигнал на включение рабочего режима ГАГК, т.е. время приведения ГАГК в меридиан с требуемой точностью в сравнении с временем приведения с начального рассогласования 180o сокращается с уменьшением угла начального рассогласования.
становится меньше допустимого порога 2ΔП, и автоматически вырабатывается сигнал на включение рабочего режима ГАГК, т.е. время приведения ГАГК в меридиан с требуемой точностью в сравнении с временем приведения с начального рассогласования 180o сокращается с уменьшением угла начального рассогласования.
Экспериментальная проверка в условиях качки опытного образца ГАГК, реализующего предложенное устройство, построенное на базе серийно выпускаемой гиросекции ПГИ-2 на гироскопах ГВК-6, показала, что время приведения с допустимым отклонением 1 и 0,1o от начального угла 180o составляет 60 и 180 минут соответственно, а с начальных углов 10-20o составляет 20 и 60 минут соответственно.
Итак, использование изобретения позволяет в три раза сократить время приведения ГАГК во время запуска с реальных углов начального отклонения от меридиана в условиях качающегося основания.
Изобретение относится к области гироприборостроения и может быть использовано в навигационных системах на базе трехосных гиростабилизаторов. Гироазимутгоризонткомпас содержит трехосный гиростабилизатор, датчики момента гироскопов, электронный блок, сумматор, интегратор, три масштабирующих блока, ключ, блок задержки, блок выделения модуля, три блока сравнения, два счетчика. На платформе гиростабилизатора установлены два трехстепенных гироскопа и два однокомпонентных акселерометра с горизонтальными осями чувствительности. По осям карданова подвеса установлены датчики углов качек и курса. Датчики момента гироскопов связаны с соответствующими входами гиростабилизатора. Первый и второй входы электронного блока связаны через первый и второй выходы гиростабилизатора с выходами акселерометров. Третий и четвертый входы гиростабилизатора связаны с лагом и блоком выработки широты. Пятый и шестой входы гиростабилизатора связаны с выходами таймера и третьего блока сравнения соответственно. Выходы электронного блока связаны через первый, второй и третий входы гиростабилизатора с датчиками момента гироскопа. Технический результат состоит в сокращении времени приведения гироазимутгоризонткомпаса с требуемой точностью в условиях качающегося объекта. 3 ил.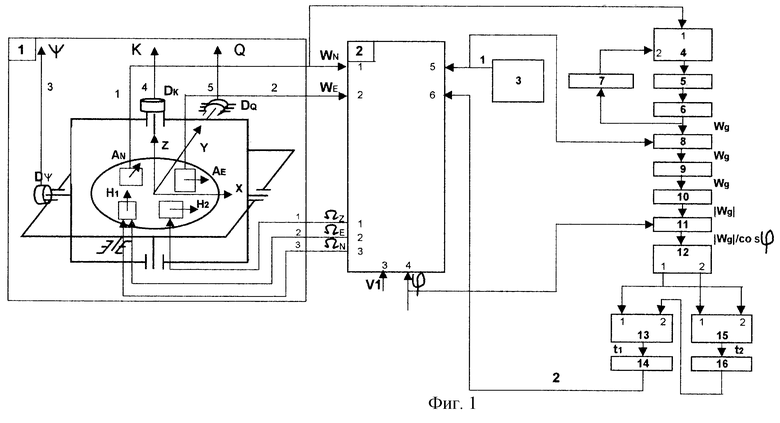
Гироазимутгоризонткомпас, содержащий трехосный гиростабилизатор, на платформе которого установлены два трехстепенных гироскопа и два однокомпонентных акселерометра с горизонтальными осями чувствительности, а по осям карданова подвеса установлены датчики углов качек и курса, при этом выходы акселерометров связаны с первым и вторым, а выходы датчиков углов качек и курса - с третьим, четвертым и пятым выходами гиростабилизатора, датчики момента гироскопов, управляющие движением платформы вокруг горизонтальных и вертикальной осей и связанные со вторым, третьим и первым входами гиростабилизатора, и электронный блок, первый и второй входы которого связаны через первый и второй выходы гиростабилизатора с выходами акселерометров, третий и четвертый входы связаны с лагом и блоком выработки широты, пятый и шестой входы связаны с выходами таймера и третьего блока сравнения соответственно, а первый, второй и третий выходы электронного блока, вырабатывающего сигналы управления платформой гиростабилизатора вокруг вертикальной и горизонтальных осей, связаны через первый, второй и третий входы гиростабилизатора с датчиками момента гироскопов, отличающийся тем, что в него дополнительно вводят последовательно соединенные сумматор, интегратор, первый масштабирующий блок, ключ, блок задержки, блок выделения модуля, третий масштабирующий блок и первый блок сравнения, а также первый и второй счетчики, второй и третий блоки сравнения, второй масштабирующий блок, при этом первый вход сумматора связан через первый выход гиростабилизатора с выходом акселерометра, а второй вход сумматора через второй масштабирующий блок связан с выходом первого масштабирующего блока, управляющий вход ключа связан с выходом таймера, второй вход третьего масштабирующего блока связан с выходом блока выработки широты, первый выход первого блока сравнения связан с вторым входом второго счетчика и через первый вход первого счетчика и третий блок сравнения связан с шестым входом электронного блока, а второй выход первого блока сравнения связан через первый вход второго счетчика и второй блок сравнения с вторым входом первого счетчика.
| Технические средства судовождения | |||
| Т.II./ Под ред | |||
| Е.Л | |||
| Смирнова | |||
| - СПб: Элмор, 2000, стр.347 | |||
| ГИРОГОРИЗОНТКОМПАС | 1993 |
|
RU2051330C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| RU 2063612 C1, 10.07.1996 | |||
| RU 2056037 C1, 10.03.1996 | |||
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "КРОЛИК С ГАРНИРОМ И СОУСОМ БЕЛЫМ С ЯЙЦОМ" | 2013 |
|
RU2514890C1 |
| US 5187870 A, 23.02.1993. | |||
