Изобретение относится к области приборостроения и может быть использовано в медицинской технике при протезировании и лечении зубов.
Известны бормашины, включающие привод в виде коллекторного электродвигателя, хвостовик вала которого посредством втулочной муфты сочленен с входным концом вала съемного наконечника (1).
Наиболее близким техническим решением (прототипом) к предлагаемому изобретению является бормашина, содержащая приводной электродвигатель, хвостовик вала которого сочленен посредством соединительного элемента (втулочной муфты и цанги) с входным концом вала съемного наконечника (2).
Недостатками приведенных технических решений являются:
1. Пониженная технологичность изготовления, связанная с необходимостью изготовления составных элементов конструкции по высоким степеням точности, для обеспечения минимальных допусков по соосности между хвостовиком электродвигателя и входным концом вала съемного наконечника (ввиду большой жесткости втулочного соединительного элемента);
2. Пониженный срок службы при высоких скоростях вращения рабочего элемента бормашины ввиду наличия значительных радиальных нагрузок на подшипники валов электродвигателя и съемного наконечника (за счет отсутствия компенсации несоосности между хвостовиком вала электродвигателя и входным концом вала съемного наконечника);
3. Отсутствие демпфирования динамических нагрузок (при внезапном "заклинивании" режущего инструмента, приводящих к стопорению вала электродвигателя).
С помощью предлагаемого технического решения достигается новый технический результат, заключающийся в повышении технологичности изготовления и срока службы при повышенных скоростях вращения рабочего элемента бормашины.
В соответствии с предлагаемым изобретением технический результат достигается тем, что в бормашине, содержащей приводной электродвигатель, хвостовик вала которого сочленен посредством соединительного элемента с выходным валом съемного наконечника, соединительный элемент выполнен в виде спиральной пружины, один конец которой выполнен с отогнутым внутрь радиальным усиком, хвостовик вала электродвигателя выполнен с торцовой осевой полостью, а входной конец вала съемного наконечника - с продольным шлицом и цилиндрической наружной проточкой, при этом цилиндрическая пружина одним концом, противоположным отогнутому усику, под напряжением установлена на хвостовике вала электродвигателя, а входной конец вала съемного наконечника охвачен вторым концом спиральной пружины, радиальный усик которой заведен в продольный шлиц входного конца вала съемного наконечника, причем наружная проточка входного конца последнего частично и с зазором размещена в торцовой осевой полости хвостовика вала электродвигателя.
Кроме того, спиральная пружина выполнена с направлением навивки, противоположным направлению вращения вала приводного электродвигателя.
Кроме того, на входном конце вала съемного наконечника напротив усика спиральной пружины выполнено глухое радиальное отверстие.
Кроме того, хвостовик вала приводного электродвигателя и входной конец вала съемного наконечника выполнены равного номинального размера по диаметру.
Кроме того, спиральная пружина выполнена цилиндрической формы.
Кроме того, боковая поверхность наружной проточки входного конца вала съемного наконечника армирована эластичным элементом.
Кроме того, эластичный элемент для армирования наружной проточки входного конца вала съемного наконечника выполнен в виде термоусадочной трубки.
Кроме того, основание проточки входного конца вала съемного наконечника и конец хвостовика вала приводного электродвигателя выполнены с фасками под углом α = 90°- β, где β - угол подъема спирали цилиндрической пружины.
Кроме того, на входном конце вала съемного наконечника выполнен дополнительный продольный шлиц, симметрично имеющемуся.
Кроме того, часть наружной проточки входного конца вала съемного наконечника, размещенная в торцовой осевой полости хвостовика вала электродвигателя, выполнена с буртиком, а эластичный элемент, в виде термоусадочной втулки, размещен между основанием вышеуказанной проточки и буртиком.
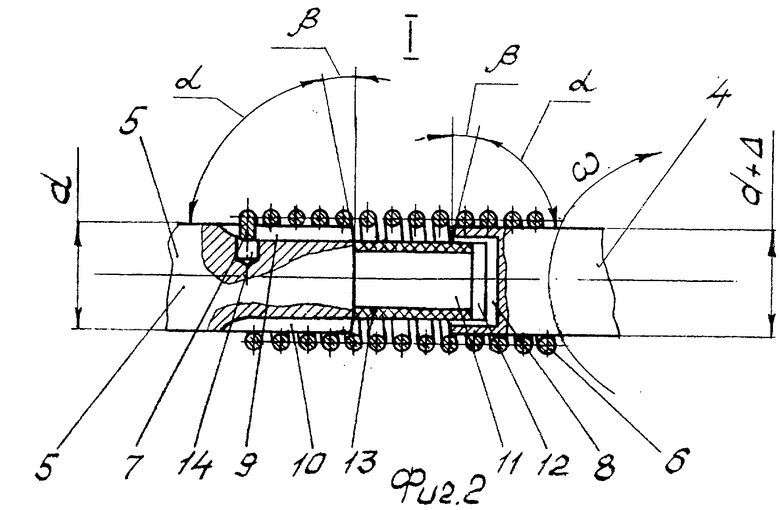
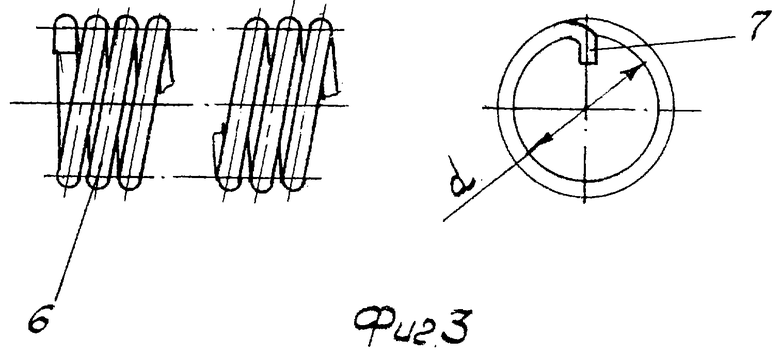
На фиг. 1 представлена предлагаемая бормашина; на фиг.2 - место 1 в увеличенном масштабе; на фиг.3 - спиральная цилиндрическая пружина в двух проекциях.
Бормашина содержит приводной бесконтактный электродвигатель - 1, съемный наконечник - 2, в котором кропится сменный режущий инструмент - 3. Хвостовик - 4 вала электродвигателя - 1 сочленен с входным концом - 5 вала съемного наконечника - 2 посредством спиральной пружины - 6 цилиндрической формы, выполненной с отогнутым во внутрь радиальным усиком - 7 на одном конце.
Хвостовик - 4 вала электродвигателя - 1 выполнен с торцовой осевой полостью - 8, а входной конец - 5 вала съемного наконечника - 2 - с диаметрально противоположно расположенными шлицами - 9 и 10 (симметрично относительно оси вала, для компенсации дисбаланса) и цилиндрической наружной проточкой - 11 с буртиком - 12.
Между буртиком - 12 и основанием проточки - 11 установлен эластичный элемент, выполненный, например, в виде термоусадочной трубки - 13 (типа "Радпласт", ТУ 6-19-2Э9-86). Буртик - 12 и начало проточки - 11 с частью эластичного элемента (трубки) - 13 размещены с зазором в торцовой осевой полости - 8 хвостовика - 4 вала электродвигателя - 1.
Хвостовик - 4 вала электродвигателя - 1 и входной конец - 5 вала съемного наконечника - 2 выполнены равного (одинакового) номинального диаметра - "d" (см. фиг.2), при этом спиральная пружина - 6 с напряжением (с натягом - "Δ", см. фиг.2 и 3) одним концом установлена на хвостовике - 4 вала электродвигателя - 1, другим же - по скользящей посадке на входном конце - 5 вала съемного наконечника - 2, причем усик - 7 пружины - 6 заведен в шлиц - 9, а напротив усика - 7 во входном конце - 5 съемного наконечника - 2 предусмотрено глухое радиальное отверстие - 14 (для компенсации дисбаланса, вызванного отогнутым усиком - 7).
Для исключения точечного контакта пружины - 6 (при динамических нагрузках) основание проточки - 11 входного конца - 5 вала съемного наконечника - 2 и конец хвостовика - 4 электродвигателя - 1 выполнены с фасками под углом α = 90°- β, где β - угол подъема спирали цилиндрической пружины - 6, причем направление навивки последней выбрано противоположным направлению вращения - ω вала двигателя - 1 (см. фиг.2).
Работа бормашины осуществляется следующим образом.
Во время вращения вала электродвигателя - 1 крутящий момент от хвостовика - 4 через спиральную пружину - 6 посредством ее усика - 7, установленного в шлице - 9 входного конца вала съемного наконечника - 2, передается на вал последнего и далее на связанный с валом наконечника - 2 режущий инструмент - 3 для обработки какого-либо объекта.
При возникновении внезапных перегрузок (от "заклинивания" режущего инструмента и, как следствие, торможения вала двигателя) часть спиральной пружины - 6, расположенная между основанием проточки - 11 входного конца - 5 вала съемного наконечника - 2 и торцем хвостовика - 4 электродвигателя - 1, скручиваясь, упруго деформируется в радиальном направлении и "садится" на упругий элемент - 13, чем достигается высокая степень демпфирования. При снятии перегрузок пружина - 6 принимает первоначальную форму, обеспечивая нормальное функционирование бормашины в рабочем режиме.
Так как направление навивки пружины - 6 выбрано противоположным направлению вращения - ω вала электродвигателя - 1, то при возникновении нагрузки витки пружины - 6, установленные с натягом на хвостовике - 4, стремясь скрутиться и сдеформироваться в радиальном направлении, обжимают боковую поверхность хвостовика - 4, там самым надежно фиксируя свое положение относительно последнего (чем больше нагрузка, тем надежнее фиксация витков пружины - 6 относительно хвостовика - 4).
Управление приводом (бесконтактным двигателем) бормашины осуществляется по классической схеме (см., например, пат. РФ 2056806 (прототип), фиг.2).
Управляющий сигнал с блока управления (в графических материалах условно не показано) подается на обмотку двигателя и, взаимодействуя с магнитным полем постоянного магнита ротора, приводит во вращение последний. Регулировка скорости вращения ротора вала двигателя осуществляется путем изменения напряжения подаваемого на обмотку управляющего сигнала с блока управления.
Из вышеприведенного следует, что предложенное техническое решение при использовании дает новый положительный технический результат:
1. Повышается технологичность, т.к. появилась возможность изготовления составных элементов бормашины по более низким классам точности за счет упругого сочленения хвостовика вала электродвигателя и входного конца вала съемного наконечника (т.к. допуск на соосность последних может быть значительно расширен);
2. Повышается срок службы изделия за счет снижения радиальных нагрузок на подшипники, возникающих при жестком сочленении валов;
3. Обеспечивается максимальное демпфирование динамических нагрузок при работе изделия (за счет упругого сочленения валов).
Следовательно, предложенная бормашина обладает положительным эффектом по сравнению с известными: повышает технологичность изготовления, срок службы, а также обеспечивает демпфирование динамических нагрузок в процессе работы.
По материалам заявки на предприятии в настоящее время изготовлены опытные образцы предложенной бормашины (с приводами в виде вентильных двигателей по пат. РФ 2067349, 2140702), которые подтвердили достижение вышеуказанного технического результата и показали высокие эксплуатационные характеристики в диапазоне рабочих скоростей до 70000 об/мин.
Источники информации
1. СССР, а.с. 15876, МПК А 61 С 1/00, 1962 г.
2. Пат. РФ 2056806, МПК А 61 С 1/06 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРМАШИНА | 2002 |
|
RU2215494C1 |
| БОРМАШИНА | 2000 |
|
RU2194472C2 |
| МИКРОМОТОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2187189C2 |
| БОРМАШИНА И ПРИСПОСОБЛЕНИЕ ДЛЯ СМЕНЫ РЕЖУЩЕГО ИНСТРУМЕНТА | 2006 |
|
RU2325868C2 |
| НАКОНЕЧНИК БОРМАШИНЫ С ПРИВОДОМ ДЛЯ ЗУБОВРАЧЕБНОГО ИЛИ ХИРУРГИЧЕСКОГО ПРИМЕНЕНИЯ | 2005 |
|
RU2372046C2 |
| СПОСОБ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА ОТ ПРИВОДА К КОРПУСУ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ, ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ЕГО МОНТАЖА | 2001 |
|
RU2193271C1 |
| БОРМАШИНА УНИВЕРСАЛЬНАЯ | 2000 |
|
RU2199969C2 |
| ПОДСТАВКА ДЛЯ БОРМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2188604C2 |
| УСТРОЙСТВО ДЛЯ БЕЗЛЮФТОВОЙ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА И СПОСОБ ЕГО МОНТАЖА | 2006 |
|
RU2325571C2 |
| ДВИГАТЕЛЬ ВЕНТИЛЬНЫЙ И СПОСОБ ЕГО СБОРКИ | 2000 |
|
RU2168834C1 |
Изобретение относится к области приборостроения и может быть использовано в медицинской технике при протезировании и лечении зубов. Бормашина содержит приводной электродвигатель, хвостовик вала которого сочленен посредством соединительного элемента с входным концом вала съемного наконечника. Соединительный элемент выполнен в виде спиральной пружины. Один конец пружины имеет отогнутый внутрь радиальный усик. Хвостовик вала электродвигателя выполнен с торцевой осевой полостью. Входной конец вала съемного наконечника выполнен с продольным шлицом и цилиндрической наружной проточкой. Спиральная пружина выполнена с направлением навивки, противоположным направлению вращения вала привода, и с концом, противоположным отогнутому усику. Пружина под напряжением установлена на хвостовике вала электродвигателя. Входной конец вала съемного наконечника охвачен вторым концом спиральной пружины, радиальный усик которой установлен в продольном шлице входного конца вала съемного наконечника. Наружная проточка входного конца последнего частично и с зазором размещена в торцовой осевой полости хвостовика вала электродвигателя. В результате повышают технологичность изготовления и срок службы при повышенных скоростях вращения рабочего элемента бормашины. 8 з.п.ф-лы, 3 ил.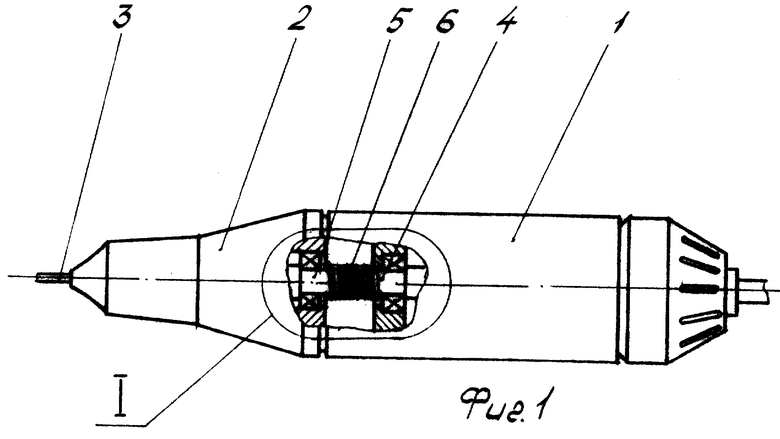
| ЗУБОТЕХНИЧЕСКАЯ БОРМАШИНА | 1992 |
|
RU2056806C1 |
| Угловой наконечник к бормашине | 1986 |
|
SU1456125A1 |
| УСТРОЙСТВО для ОБРАБОТКИ КОСТНОЙ ТКАНИ | 0 |
|
SU240916A1 |
| Модульная конструкция транспортного средства | 1987 |
|
SU1541103A1 |

