Изобретение относится к механическим передачам и может быть использовано для точного поворота на заданный произвольный угол, а также для непрерывного вращения вокруг вертикальной оси, что может быть использовано для обзора местности с помощью оптических или радиолокационных приборов, в голографии, в авиации, в космических кораблях и станциях, особенно там, где требуются перемещения с особенно высокой точностью, высоким передаточным числом и малыми габаритно-массовыми характеристиками. Также может быть применено в поверочных установках для точного задания углов.
Известна вариаторная цепная передача, содержащая корпус, ведущий и ведомый валы, ведущие и ведомые в осевом направлении конические полушкивы с радиальными зубьями, охватывающие конические полушкивы цепь, звенья которой шарнирно соединены между собой и снабжены призматическими упорами с уклонами их лезвий в соответствии с уклонами радиальных зубьев конических полушкивов и механизм осевого перемещения конических полушкивов, отличающаяся тем, что шарнирные валики цепи снабжены продольными пазами с пружинными фиксаторами и призматическими упорами, выполненными по осям шарнирных валиков, которые имеют возможность подпружиненного продольного перемещения и осевого поворота, причем в свободном состоянии каждый шарнирный валик устанавливается таким образом, что проекции лезвий его призматических упоров располагаются перпендикулярно продольной цепи, а щеки звеньев цепи снабжены роликами или скользящими упорами, см. заявку РФ на изобретение под 98118657/28.
Недостатками данной передачи являются: изменение (вытягивание) звеньев цепи во времени, что требует регулярной проверки и подтягивания, сложность самой конструкции, а также ее изготовления, также достаточно большие габариты.
Известны волновые механические передачи, состоящие из двух колес: одно колесо гибкое, другое жесткое, по гибкому колесу изнутри двигается механический волнообразователь, например кулачок, который образует на колесе "волну", а она уже приводит в действие жесткое колесо (см. "Волновые механические передачи" изд. Научно-исследовательский институт по машиностроению. - М.: 1976 г. МВТУ им. Баумана, стр.4-18) - прототип.
Недостатками таких передач при всех положительных свойствах (применительно к приводу антенной системы РЛС) являются:
статический мертвый ход, который возникает из-за зазоров в цепи двигатель - выходное звено волновой передачи;
значительный упругий мертвый ход вследствие упругих изгибных деформаций гибкого колеса;
эксцентриситет генератора и жесткого колеса, который зависит от точности изготовления деталей волновой передачи и принципиально не может быть устранен, т.к. размерная цепь, определяющая положение осей генератора и жесткого колеса, является достаточно длинной;
консольное расположение двигателя по отношению к выходному валу, что приводит к вредному изгибающему моменту, а также принципиально затрудняет герметизацию всего устройства.
Известен редуктор управления антенной колонкой, см. заявку РФ 2000122784/20 (024172), в которой редуктор содержит: втулку-барабан, жесткое колесо, гибкое колесо, два малых нажимных подшипника, шесть или восемь малых опорных подшипников, выходной вал, большой подшипник, большое зубчатое зацепление, малое зубчатое зацепление, при этом втулка-барабан с одного конца имеет по внешнему диаметру большое зубчатое зацепление, а внутренним диаметром опирается на большой подшипник, плотно посаженный на один конец выходного вала, с другого конца втулка-барабан через малые нажимные и опорные подшипники контактирует с внутренним диаметром гибкого колеса, которое через малое зубчатое зацепление связано с жестким колесом, а само гибкое колесо жестко связано с другим концом выходного вала, выходной вал крепится в радиально-упорных подшипниках и является выходом передачи, входом же является большое зубчатое зацепление с приводным электродвигателем через зубчатое колесо - прототип.
Недостатками данного редуктора являются довольно высокие габаритно-массовые характеристики (ГМХ), отсюда повышенная стоимость и неудобство в эксплуатации. Если при применении в наземных антенных системах радиолокаторов с этим еще можно мириться, то при применении в авиации и космосе это создает определенные трудности.
Технической задачей изобретения является расширение области применения при снижении ГМХ.
Указанная цель достигается следующим конструктивом, который содержит платформу, жесткое зубчатое колесо, гибкое зубчатое колесо, упорный шарикоподшипник, шаговый двигатель, втулку, телескопическое устройство, два нажимных ролика генератора волн, причем платформа установлена на жестком зубчатом колесе волновой передачи, которое опирается на упорный шарикоподшипник, гибкое же зубчатое колесо крепится на основании, на фланце внутри гибкого колеса установлен шаговый двигатель, на валу которого жестко посажена втулка, связанная телескопическим устройством с нажимными роликами генератора волн, которые в свою очередь поджимаются пружинами в радиальном направлении.
На чертеже показано сечение поворотного механического устройства по продольной оси симметрии, на котором изображено:
1 - платформа, 2 - жесткое зубчатое колесо волновой передачи, 3 - упорный шарикоподшипник, 4 - гибкое зубчатое колесо волновой передачи, 5 - основание, 6 - шаговый двигатель, 7 - нажимные ролики генератора волн, 8 - радиальные пружины, 9 - втулка двигателя с телескопическими устройствами 10.
Платформа 1 устанавливается на жестком зубчатом колесе 2 волновой передачи, которое опирается на упорный шарикоподшипник 3. Гибкое зубчатое колесо 4 крепится на основании 5. На фланце гибкого колеса установлен двигатель 6. Генератор волн состоит из двух нажимных роликов 7, поджимаемых пружинами 8 в радиальном направлении с целью выборки люфта в зубчатом зацеплении. На вал двигателя садится неподвижно втулка 9, которая связана с нажимными роликами телескопическим устройством 10.
Поворотное механическое устройство работает следующим образом. Двигатель (шаговый или асинхронный управляемый) передает вращение втулке 9 генератора волн, которая посредством телескопического устройства 10 вращает нажимные ролики 7 вокруг оси вала двигателя. Нажимные ролики, обкатываясь по внутренней поверхности неподвижного гибкого колеса 4, создают две волны деформации гибкого колеса, в результате этого жесткое колесо 2 вместе с платформой 1 будет медленно поворачиваться вокруг своей оси. Благодаря пружинному поджатию роликов зазоры в зацеплении гибкого и жесткого колес отсутствуют, и передача работает как люфтовыбирающая. Пружины 8 одним концом давят на один нажимной ролик, другим - на другой ролик. Такая конструкция создает одинаковое постоянное давление на гибкое колесо в зацеплениях, что обеспечивает высокую плавность работы передачи.
Такая конструкция генератора волн позволяет устранить влияние эксцентриситета вала двигателя и жесткого колеса на работу волновой передачи и сделать ее плавной, без толчков и заклиниваний. Кроме того, вал двигателя нагружается только крутящим моментом и полностью освобождается от радиальных нагрузок. Зубья гибкого и жесткого колес могут быть изготовлены стандартными методами с обычной степенью точности. При необходимости, например изменении положения основания 5 в пространстве, может быть установлен второй упорный шарикоподшипник.
Дополнительно можно отметить, что такая конструкция и помещение двигателя внутри гибкого колеса (во всех существующих конструкциях волновых передач двигатель расположен снаружи гибкого колеса) позволяет значительно уменьшить габаритно-массовые характеристики, упрощается вопрос герметизации (при необходимости) передачи.
Таким образом двигатель с редуктором теперь составляет одно целое, причем двигатель вписался в габариты редуктора и вся система стала более компактной. Видно, что момент на выходном валу не зависит от прилагаемой нагрузки. Стало быть не изменяется его кинематическая точность. Это дает возможность резко увеличить динамические характеристики привода. Передаточные числа предлагаемого привода лежат в пределах 70-300, а погрешность (выдерживание задаваемого угла поворота) не превышает единицу угловых минут, что позволяет применять его в высокоточных инерциальных системах навигации, наведения, радиолокации и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2262624C2 |
| РЕДУКТОР УПРАВЛЕНИЯ АНТЕННОЙ СИСТЕМОЙ | 2000 |
|
RU2194893C2 |
| РЕДУКТОР УПРАВЛЕНИЯ АНТЕННОЙ КОЛОНКОЙ | 2003 |
|
RU2285845C2 |
| УСТРОЙСТВО ПОВОРОТА ОСИ НА ЗАДАННЫЙ УГОЛ | 2009 |
|
RU2403467C1 |
| Способ управления лазерным лучом | 2016 |
|
RU2639609C2 |
| Способ управления лазерным лучом | 2019 |
|
RU2701793C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ Абрамова В.А. | 2014 |
|
RU2568626C1 |
| Способ непрерывного воздействия лазерным лучом на неупорядоченно движущийся объект | 2024 |
|
RU2822970C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА С ДВУМЯ ДЕФОРМИРУЕМЫМИ ЗУБЧАТЫМИ ИЛИ ФРИКЦИОННЫМИ КОЛЕСАМИ АБРАМОВА В.А. | 2015 |
|
RU2597055C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ АБРАМОВА В.А. | 2013 |
|
RU2566584C2 |
Изобретение относится к механическим передачам и может быть использовано для точного поворота на заданный произвольный угол. Поворотное механическое устройство содержит платформу, жесткое зубчатое колесо, упорный шарикоподшипник, шаговый двигатель, втулку, телескопическое устройство и два нажимных ролика генератора волн. Платформа установлена на жестком зубчатом колесе и опирается на упорный шарикоподшипник. Гибкое зубчатое колесо крепится на основании. На фланце внутри гибкого колеса установлен шаговый двигатель. На валу двигателя жестко посажена втулка, связанная телескопическим устройством с нажимными роликами генератора волн. Ролики поджимаются пружинами в радиальном направлении. Технический результат - расширение области применения предложенной передачи при снижении габаритно-массовых характеристик. 1 ил.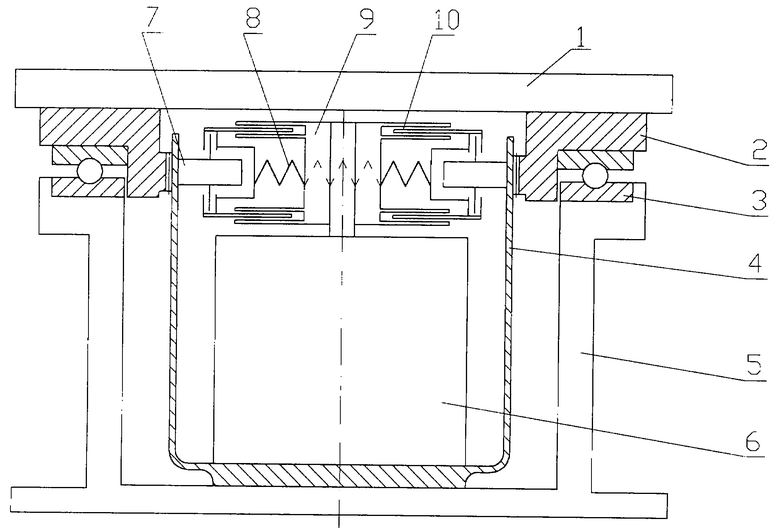
Поворотное механическое устройство, содержащее платформу, жесткое зубчатое колесо, гибкое зубчатое колесо, упорный шарикоподшипник, шаговый двигатель, втулку, телескопическое устройство, два нажимных ролика генератора волн, причем платформа установлена на жестком зубчатом колесе волновой передачи, которое опирается на упорный шарикоподшипник, гибкое зубчатое колесо крепится на основании, на фланце внутри гибкого колеса установлен шаговый двигатель, на валу которого жестко посажена втулка, связанная телескопическим устройством с нажимными роликами генератора волн, которые, в свою очередь, поджимаются пружинами в радиальном направлении.
| М.Н.ИВАНОВ | |||
| Волновые зубчатые передачи | |||
| - М.: Высшая школа, 1981, с.12, рис.1.7 | |||
| Д.П.ВОЛКОВ, А.Ф.КРАЙНЕВ | |||
| Волновые зубчатые передачи | |||
| - Киев: Техника, 1976, с.13, рис.3(ж) | |||
| ВОЛНОВОЙ ПРИВОД | 1995 |
|
RU2085785C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 0 |
|
SU257247A1 |
