Изобретение относится к механическим передачам и может быть использовано в следящих электроприводах, например в электромеханических гироскопах, также может быть использовано в приводах антенных систем в радиолокации, особенно в приводах фазированных антенных решеток.
Общеизвестны различные механические передачи: ременные, зубчатые, цепные, червячные и т.д. В зависимости от типа им присущи те или иные недостатки, но общими для всех являются наличие люфтов, большая инерционность, невысокие передаточные числа и пр.
Известны электромеханические передачи (см. A.A. Ефимов "Принцип работы аэрологического ИВК АВК-1", М., Гидрометеоиздат, 1989 г., стр.80-81), например следящие системы с отрицательной обратной связью - ООС для систем угловой автоматики, состоящие из суммирующего усилителя, усилителя мощности, исполнительного двигателя, приводящего в движение антенну РЛС через зубчатую передачу, и тахогенератора, в которых сигнал отработки угла поворота антенны (сигнал ошибки) поступает на вход суммирующего усилителя, на другой вход которого поступает сигнал ООС, формируемый из выходного напряжения тахогенератора, кинематически связанного с валом поворота антенны, с выхода суммирующего усилителя разностный сигнал поступает через усилитель мощности на исполнительный электродвигатель поворота вала антенны до тех пор, пока сигнал ошибки не станет минимальным (все это рассматривается по одной координате).
Недостатками данной передачи являются: недостаточная точность из-за наличия зазора, имеющегося во всех зубчатых передачах, далее, когда меняется направление движения, выходной вал теряет на короткий период согласованное положение с ведущим валом, в результате система "рыскает", т.е. совершает мелкое дрожание у нулевого положения, кроме того, стоит вопрос об устойчивости системы в целом из-за различия резонансных частот привода и антенны и т.д.
Известны волновые механические передачи, состоящие из двух колес: одно колесо гибкое, другое жесткое, внутри гибкого колеса вращается генератор волн, например кулачок, который образует на гибком колесе "волну", в результате этого гибкое колесо (при неподвижном жестком колесе) медленно поворачивается, приводя в движение выходной вал (см. "Волновые механические передачи", изд. Научно-исследовательский институт по машиностроению, М., 1976 г. , МВТУ им. Баумана, стр.4-18) - прототип.
Недостатками таких передач при всех положительных свойствах (применительно к приводу антенной системы РЛС) являются:
статический мертвый ход, который возникает из-за зазоров в цепи двигатель - выходное звено волновой передачи;
значительный упругий мертвый ход вследствие упругих изгибных деформаций гибкого колеса;
эксцентриситет генератора и жесткого колеса, который зависит от точности изготовления деталей волновой передачи и принципиально не может быть устранен, т.к. размерная цепь, определяющая положение осей генератора и жесткого колеса, является достаточно длинной;
консольное расположение двигателя по отношению к выходному валу, что приводит к вредному изгибающему моменту, а также принципиально затрудняет герметизацию всего устройства.
Технической задачей изобретения является повышение точности работы передачи.
Указанная цель достигается следующим конструктивом: предлагается редуктор управления антенной системой, содержащий жесткое зубчатое колесо, гибкое зубчатое колесо, генератор волн, выходной вал, отличающийся тем, что генератор волн выполнен в виде пустотелого цилиндра, один конец которого внутренней поверхностью опирается на подшипник, а наружной поверхностью связан с зубчатым колесом приводного электродвигателя, другой конец пустотелого цилиндра является плавающим и контактирует с гибким зубчатым колесом через нажимные подшипники, которые расположены на упругих консольных балках, образованных прорезями вдоль оси пустотелого цилиндра, с обеспечением беззазорного зубчатого зацепления гибкого зубчатого колеса с жестким зубчатым колесом, и через опорные подшипники, которые крепятся на жестком основании на пустотелом цилиндре для обеспечения уменьшения упругого мертвого хода передачи, гибкое зубчатое колесо жестко связано с выходным валом, выходной вал крепится в радиально-упорных шарикоподшипниках и имеет выходные концы с обеих сторон для крепления антенного устройства.
На чертеже показаны сечение генератора и выходного вала по продольной оси симметрии, а также разрез по А-А, на которых 1 - генератор волн - пустотелый цилиндр, 2 - нажимные подшипники, 3 - жесткое зубчатое колесо, 4 - гибкое зубчатое колесо, 5 - выходной вал, 6 - опорные подшипники, 7 - подшипник-опора генератора, 8 - штифты с винтами, 9 - обычное зубчатое колесо, 10 - зубчатое зацепление волновой передачи, 11 - радиально-упорные подшипники, 12 - приводной электродвигатель, 13 - обычное зубчатое колесо, 14 - осевые прорези на полом цилиндре.
Генератор волн 1 с одного конца (левого по чертежу) по внешней поверхности имеет обычный зубчатый венец 9, а внутренней поверхностью опирается на радиальный шарикоподшипник 7, который посажен на скользящей посадке на выходной вал 5. С другого конца генератор волн через нажимные подшипники 2 и опорные подшипники 6 контактирует с внутренней поверхностью гибкого колеса 4, деформируя его определенным образом. Форму гибкого колеса можно изменять путем радиального смещения опорных подшипников 6, например установкой тонких прокладок под оси этих подшипников. Точно также можно изменять величину радиального усилия нажимных подшипников 2. Осевые прорези 14 (их длина может достигать 50-80 мм) образуют на генераторе - цилиндре упругие консольные балки для нажимных подшипников 2. Для установки генератора в гибкое колесо консольные балки предварительно прогибают в направлении к оси, вставляют в гибкое колесо и затем отпускают, благодаря этому нажимные подшипники находятся под действием упругого радиального усилия, направленного от оси, что приводит к выборке люфтов в зацеплении 10 волновой передачи. Другой конец гибкого колеса 4 (правый по чертежу) штифтами с винтами 8 жестко закреплен на выходном валу 5, который установлен в радиально-упорных подшипниках 11. На концах выходного вала 5 жестко крепится антенна (на чертеже не показана). С зубчатым колесом 9 соединяется колесо 13 приводного двигателя 12.
Редуктор управления антенной системой работает следующим образом. Двигатель 12 (шаговый или асинхронный управляемый) с помощью обычной зубчатой передачи, состоящей из колес 13 и 9, передает движение на генератор волн 1, являющийся пустотелым цилиндром. Генератор волн 1 опирается одним концом на радиальный шарикоподшипник 7, посаженный на выходной вал 5. На другом конце генератора 1 расположены два нажимных подшипника 2 и четыре опорных подшипника 6, с помощью которых гибкое колесо 4 деформируется определенным образом.
Нажимные подшипники 2, установленные на упругих консольных балках, создают радиальные усилия, направленные от оси генератора, так что зубья гибкого колеса 4 входят в зацепление с зубьями жесткого колеса 3 без зазора, таким образом устраняется статический мертвый ход волновой передачи. Опорные подшипники 6 ограничивают изгибную деформацию гибкого колеса, возникающую из-за приложения крутящего момента, вследствие этого существенно уменьшается упругий мертвый ход волновой передачи в сравнении с обычной волновой передачей без опорных подшипников. Второй конец генератора 1 является плавающим - опирается не на выходной вал 5, а на жесткое колесо 3 через гибкое колесо 4. Влияние эксцентриситета генератора устраняется, вращение становится плавным без рывков и заклиниваний. Генератор 1 при вращении создает две волны, благодаря этому гибкое колесо медленно поворачивается относительно неподвижного жесткого колеса и передает движение выходному валу 5, установленному в радиально-упорных шарикоподшипниках 11, осевые и радиальные зазоры в которых выбираются с помощью пружин известными способами. Нагрузка - крепление антенны - может быть приложена с обоих концов выходного вала, что дает возможность произвести герметизацию привода наиболее простыми способами.
Изобретение относится к механическим передачам и может быть использовано в следящих электроприводах. Редуктор управления антенной системой содержит жесткое зубчатое колесо, гибкое зубчатое колесо, генератор волн и выходной вал. Генератор волн выполнен в виде пустотелого цилиндра, один конец которого внутренней поверхностью опирается на подшипник, а наружной поверхностью связан с зубчатым колесом приводного электродвигателя. Другой конец пустотелого цилиндра является плавающим и контактирует с гибким зубчатым колесом через нажимные подшипники. Нажимные подшипники расположены на упругих консольных балках, образованных прорезями вдоль оси пустотелого цилиндра, с обеспечением беззазорного зубчатого зацепления гибкого зубчатого колеса с жестким зубчатым колесом. Опорные подшипники крепятся на жестком основании на пустотелом цилиндре для обеспечения уменьшения упругого мертвого хода передачи. Гибкое зубчатое колесо жестко связано с выходным валом. Выходной вал крепится в радиально-упорных шарикоподшипниках и имеет выходные концы с обеих сторон для крепления антенного устройства. Технический результат - повышение точности работы передачи. 1 ил.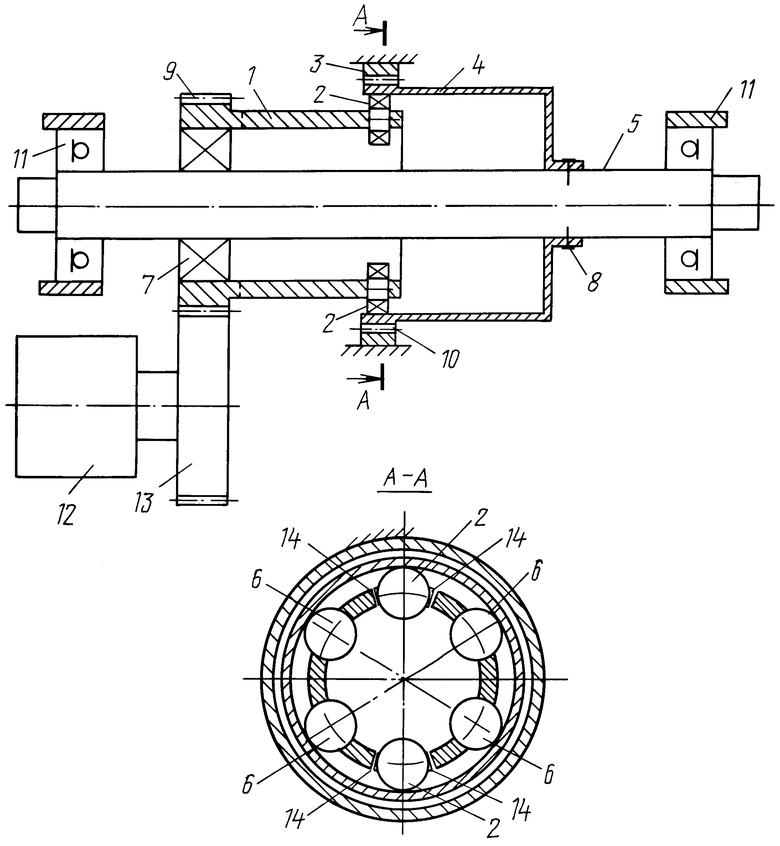
Редуктор управления антенной системой, содержащий жесткое зубчатое колесо, гибкое зубчатое колесо, генератор волн, выходной вал, отличающийся тем, что генератор волн выполнен в виде пустотелого цилиндра, один конец которого внутренней поверхностью опирается на подшипник, а наружной поверхностью связан с зубчатым колесом приводного электродвигателя, другой конец пустотелого цилиндра является плавающим и контактирует с гибким зубчатым колесом через нажимные подшипники, которые расположены на упругих консольных балках, образованных прорезями вдоль оси пустотелого цилиндра, с обеспечением беззазорного зубчатого зацепления гибкого зубчатого колеса с жестким зубчатым колесом, и через опорные подшипники, которые крепятся на жестком основании на пустотелом цилиндре, для обеспечения уменьшения упругого мертвого хода передачи, гибкое зубчатое колесо жестко связано с выходным валом, выходной вал крепится в радиально-упорных шарикоподшипниках и имеет выходные концы с обеих сторон для крепления антенного устройства.
| ЦЕЙТЛИН Н.И., ЦУКЕРМАН Э.М | |||
| Волновые передачи и их применение в приводах механизмов ракет и спутников | |||
| Вопросы ракетной техники, № 5, 1964, с | |||
| Пуговица | 0 |
|
SU83A1 |
| ПРИВОДНОЕ УСТРОЙСТВО | 0 |
|
SU311071A1 |
| РЕГУЛИРУЕМЫЙ ГЕНЕРАТОР ЗУБЧАТОЙ ВОЛНОВОЙПЕРЕДАЧИ | 0 |
|
SU171712A1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 0 |
|
SU344188A1 |

