Изобретение относится к механическим передачам и может быть использовано в следящих электроприводах, например в приводах антенных систем РЛС для точного управления антенными колонками, особенно в метео-РЛС, где отражающая поверхность цели (радиозонда) очень мала. Предпочтительно его использование в системах, где требуются перемещения с особенно высокой точностью, высоким передаточным числом и малыми габаритно-массовыми характеристиками. Также может быть использовано в поверочных установках для точного задания углов.
Общеизвестны различные механические передачи: ременные, зубчатые, цепные, червячные и т.д. В зависимости от типа им присущи те или иные недостатки, но общими для всех являются наличие люфтов, большая инерционность, невысокие передаточные числа и пр.
Известны электромеханические передачи (см. А.А.Ефимов. ″Принцип работы аэрологического ИВК АВК-1″, М., Гидрометеоиздат, 1989 г., стр.80-81), например следящие системы с отрицательной обратной связью - ООС для систем угловой автоматики, состоящие из суммирующего усилителя, усилителя мощности, исполнительного двигателя, приводящего в движение антенну РЛС через зубчатую передачу, и тахогенератора, в которых сигнал обработки угла поворота антенны (сигнал ошибки) поступает на вход суммирующего усилителя, на другой вход которого поступает сигнал ООС, формируемый из выходного напряжения тахогенератора, кинематически связанного с валом поворота антенны, с выхода суммирующего усилителя разностный сигнал поступает через усилитель мощности на исполнительный электродвигатель поворота вала антенны до тех пор, пока сигнал ошибки не станет минимальным (все это рассматривается по одной координате).
Недостатками данной передачи являются недостаточная точность из-за наличия зазора, имеющегося во всех зубчатых передачах, далее, когда меняется направление движения, выходной вал теряет на короткий период согласованное положение с ведущим валом, в результате система ″рыскает″, т.е. совершает мелкое дрожание у нулевого положения, кроме того, стоит вопрос об устойчивости системы в целом из-за различия резонансных частот привода и антенны и т.д.
Известны волновые механические передачи, состоящие из двух колес: одно колесо гибкое, другое жесткое, внутри гибкого колеса вращается генератор волн, например кулачок, который образует на гибком колесе ″волну″, в результате этого гибкое колесо (при неподвижном жестком колесе) медленно поворачивается, приводя в движение выходной вал (см. ″Волновые механические передачи″, изд. Научно-исследовательский институт по машиностроению, М., 1976 г., МВТУ им. Баумана, стр.4-18).
Известен редуктор управления антенной колонкой, см. заявку РФ ″2000122784/20 (024172), в котором редуктор содержит втулку-барабан, жесткое колесо, гибкое колесо, два малых нажимных подшипника, шесть или восемь малых опорных подшипников, выходной вал, большой подшипник, большое зубчатое зацепление, малое зубчатое зацепление, при этом втулка-барабан с одного конца имеет по внешнему диаметру большое зубчатое зацепление, а внутренним диаметром опирается на большой подшипник, плотно посаженный на один конец выходного вала, с другого конца втулка-барабан через малые нажимные и опорные подшипники контактирует с внутренним диаметром гибкого колеса, которое через малое зубчатое зацепление связано с жестким колесом, а само гибкое колесо жестко связано с другим концом выходного вала, выходной вал крепится в радиально-упорных подшипниках и является выходом передачи, входом же является большое зубчатое зацепление с приводным электродвигателем через зубчатое колесо - прототип.
Недостатками таких передач при всех положительных свойствах (применительно к приводу антенной системы РЛС) являются:
статический мертвый ход, который возникает в цепи двигатель - выходное звено волновой передачи;
значительный упругий мертвый ход вследствие упругих изгибных деформаций гибкого колеса;
эксцентриситет генератора, гибкого и жесткого колес, который зависит от точности изготовления деталей волновой передачи и принципиально не может быть устранен, так как размерная цепь, определяющая положение осей генератора, гибкого и жесткого колес, является достаточно длинной.
Технической задачей является повышение точности передачи за счет устранения статического мертвого хода и резкого уменьшения упругого мертвого хода, а также повышение плавности работы, уменьшение потерь на внутреннее трение в волновой передаче - повышение ее КПД.
Указанная цель достигается следующими конструктивными решениями. Предлагается редуктор управления антенной колонкой, содержащий жесткое зубчатое колесо, гибкое зубчатое колесо, генератор волн, выполненный в виде пустотелого цилиндра, выходной вал, зубчатую муфту для связи гибкого зубчатого колеса с выходным валом, отличающийся тем, что гибкое зубчатое колесо и генератор волн являются полностью плавающими, с обеих сторон пустотелого цилиндра вырезаны по две консольные упругие балки, на которые установлены нажимные шарикоподшипники, контактирующие с одной стороны с гибким колесом, обеспечивая беззазорное зацепление в волновой передаче, с другой - с гибкой зубчатой полумуфтой, обеспечивая беззазорное зацепление в зубчатой муфте, на жесткой части пустотелого цилиндра установлены опорные шарикоподшипники, определяющие форму гибкого колеса волновой передачи и форму гибкой зубчатой полумуфты и центрирующие вместе с нажимными подшипниками пустотелый цилиндр генератора и гибкое колесо по оси жесткого колеса волновой передачи и по оси жесткой полумуфты зубчатой муфты.
На фиг.1 показаны волновая передача 1, вид слева и разрез по А-А, на которых 2 - жесткое колесо волновой передачи, 3 - оболочка, имеющая слева гибкое колесо, а справа - гибкую зубчатую полумуфту, 4 - зубчатая безлюфтовая муфта, 5 - генератор волн, выполненный в виде пустотелого цилиндра, 6 - два нажимных шарикоподшипника, расположенных на упругих консольных балках, 7 - опорные малые шарикоподшипники в количестве шесть штук, определяющие форму гибкого колеса и препятствующие его изгибу под нагрузкой, 8 - два малых шарикоподшипника, центрирующие генератор в своей плоскости, 9 - два нажимных шарикоподшипника, расположенных на упругих консольных балках, с помощью которых деформируется гибкая полумуфта для создания беззазорного зацепления в зубчатой муфте, 10 - выходной вал, 11 - осевые прорези на полом цилиндре. Осевые прорези 11 длиной 50-80 мм образуют на пустотелом цилиндре упругие консольные балки для нажимных подшипников 6 и 9.
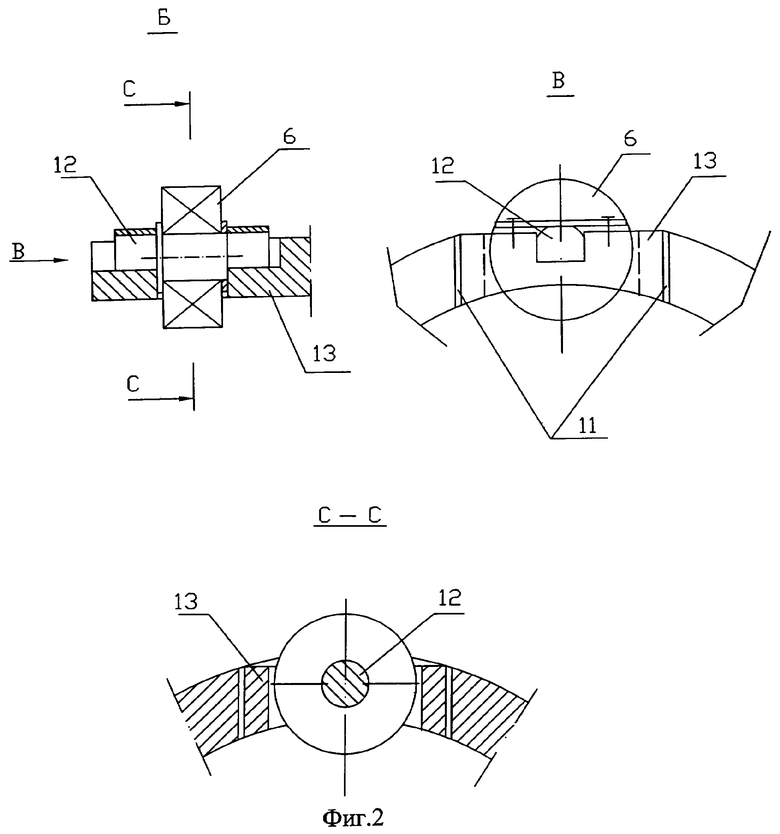
На фиг.2 показаны установка и крепление нажимного подшипника 6 на упругой консольной балке 13 генератора волн. Положение нажимного подшипника относительно центра пустотелого цилиндра определяется глубиной паза на упругой консольной балке для оси подшипника 12. Аналогично устанавливаются нажимные подшипники 9 на своих упругих консольных балках и опорные подшипники 7, 8 на жесткой части пустотелого цилиндра.
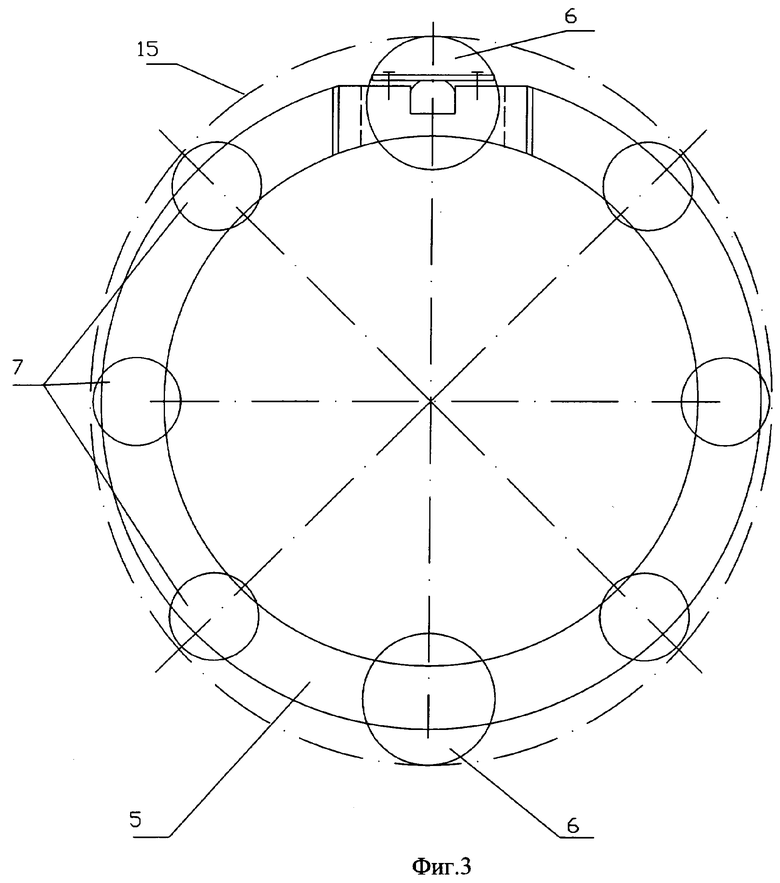
На фиг.3 показано положение нажимных 6 и опорных 7 подшипников относительно центра пустотелого цилиндра в зоне волновой передачи. Огибающая 15, представляющая в данном случае эллипс, большая ось которого совпадает с вертикальной осью расположения нажимных подшипников 6, определяет форму гибкого колеса в собранной волновой передаче. В зацеплении гибкого 3 и жесткого 2 колес боковые зазоры между зубьями в зоне нажимных подшипников отсутствуют благодаря усилию со стороны упругой консольной балки 13. При передаче вращающего момента от двигателя посредством поводковой муфты (на чертеже не показаны), поводки которой входят в пазы 14 генератора волн, генератор 5 начинает вращаться, образуя две волны деформации гибкого колеса. При этом гибкое колесо приобретает изгибную радиальную деформацию, которая тем больше, чем больше вращающий момент (момент нагрузки). В результате радиальной деформации гибкого колеса возникает упругий мертвый ход, влияющий на точность привода. Опорные подшипники 7 препятствуют изгибной деформации гибкого колеса и существенно уменьшают упругий мертвый ход так же, как это происходит при применении кулачка в генераторе волн. Однако в случае применения кулачкового генератора волн приходится применять гибкий шарикоподшипник, долговечность которого невысока, и, кроме того, в кинематической цепи возникает существенный статический мертвый ход из-за боковых зазоров между зубьями волновой передачи.
Форму гибкого колеса можно изменять путем радиального смещения опорных подшипников 7, например установкой тонких прокладок под оси этих подшипников. Таким же образом можно изменять величину радиального усилия нажимных подшипников 6. Для установки генератора в гибкое колесо консольные балки предварительно прогибают в направлении к оси, вставляют в гибкое колесо и затем отпускают, благодаря этому нажимные подшипники находятся под действием упругого радиального усилия, направленного от оси, что приводит к выборке зазоров в зацеплении волновой передачи 1.
Жесткое соединение гибкого колеса с выходным валом обычно не обеспечивает хорошего качества работы волновой передачи из-за влияния перекосов осей гибкого и жесткого колес. Применение зубчатой муфты для связи гибкого колеса с выходным валом позволяет решить эту проблему за счет зазоров между зубьями муфты, однако здесь появляется статический мертвый ход. В предлагаемой конструкции зазоры в зацеплении зубчатой муфты (числа зубьев гибкой полумуфты и жесткой полумуфты одинаковы) выбираются с помощью двух нажимных подшипников 9. На качество работы волновой передачи влияет перекос осей гибкого и жесткого колес в плоскости, перпендикулярной плоскости расположения нажимных подшипников 6. По этой причине расположение оси нажимных подшипников 9 зубчатой муфты принято под углом 90 градусов к оси нажимных подшипников 6 волновой передачи. Боковые зазоры между зубьями в зацеплении зубчатой муфты в зоне контакта опорных малых подшипников 8 позволяют компенсировать перекос осей гибкого и жесткого колес.
Изобретение относится к механическим передачам и может быть использовано в электроприводах, например в приводах антенных систем РЛС для точного управления антенными колонками. Редуктор управления антенной колонкой содержит волновую передачу. Гибкое зубчатое колесо и генератор волн 5 являются полностью плавающими. Генератор волн выполнен в виде пустотелого цилиндра. С обеих сторон пустотелого цилиндра вырезаны по две консольные упругие балки. Нажимные шарикоподшипники 6, 9 установлены на упругие балки и контактируют с гибким колесом и с гибкой зубчатой полумуфтой, обеспечивая беззазорное зацепление в волновой передаче. На жесткой части пустотелого цилиндра установлены опорные шарикоподшипники 7, которые определяют форму гибкого колеса и гибкой зубчатой полумуфты и центрируют вместе с нажимными подшипниками пустотелый цилиндр генератора волн и гибкое колесо по оси жесткого колеса 2 волновой передачи и по оси жесткой полумуфты зубчатой муфты. Технической задачей изобретения является повышение точности и плавности работы передачи, а также уменьшение потерь на внутреннее трение, т.е. повышение КПД. 3 ил.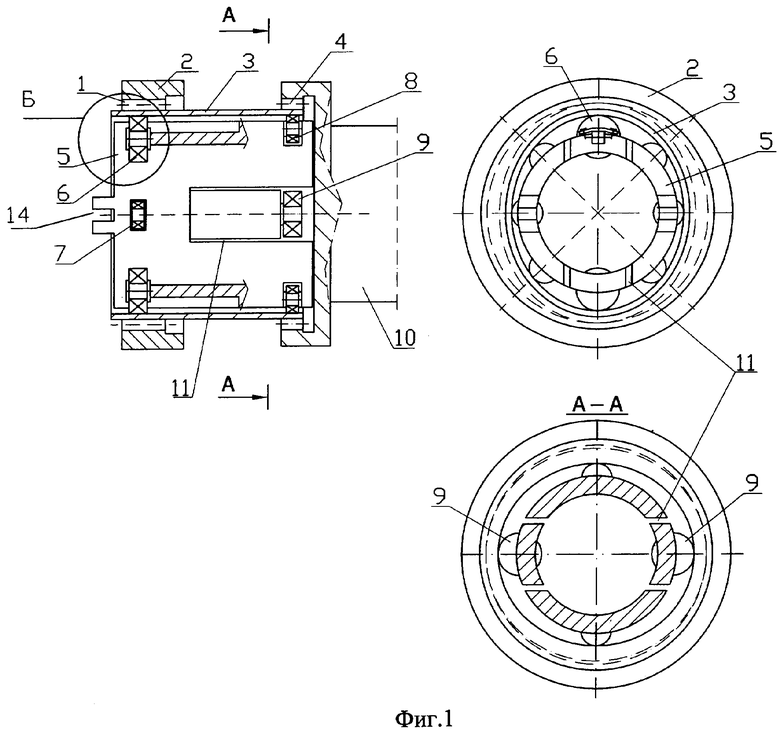
Редуктор управления антенной колонкой, содержащий жесткое зубчатое колесо, гибкое зубчатое колесо, генератор волн, выполненный в виде пустотелого цилиндра, выходной вал, зубчатую муфту для связи гибкого зубчатого колеса с выходным валом, отличающийся тем, что гибкое зубчатое колесо и генератор волн являются полностью плавающими, с обеих сторон пустотелого цилиндра вырезаны по две консольные упругие балки, на которые установлены нажимные шарикоподшипники, контактирующие с одной стороны с гибким колесом, обеспечивая беззазорное зацепление в волновой передаче, с другой - с гибкой зубчатой полумуфтой, обеспечивая беззазорное зацепление в зубчатой муфте, на жесткой части пустотелого цилиндра установлены опорные шарикоподшипники, определяющие форму гибкого колеса волновой передачи и форму гибкой зубчатой полумуфты и центрирующие вместе с нажимными подшипниками пустотелый цилиндр генератора волн и гибкое колесо по оси жесткого колеса волновой передачи и по оси жесткой полумуфты зубчатой муфты.
| РЕДУКТОР УПРАВЛЕНИЯ АНТЕННОЙ СИСТЕМОЙ | 2000 |
|
RU2194893C2 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1971 |
|
SU426087A1 |
| КОВАЛЕВ Н.А | |||
| Передачи гибкими колесами | |||
| - М.: Машиностроение, 1979, с.169, рис.76. | |||

