Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на подвижных объектах.
Известны радиолокационные станции [1] стр. 221, содержащие антенну, антенный переключатель, передатчик, синхронизатор, приемник и индикаторное устройство, использующие в своей работе особенности радиолокации при зондировании пространства радиоимпульсами малой длительности.
Наиболее близкой по технической сущности является многоцелевая радиолокационная станция [2] стр.31, содержащая антенную решетку, распределительное устройство, антенный переключатель, передатчик, приемники, устройство первичной обработки сигнала, устройство вторичной обработки сигнала, синхронизатор.
Многоцелевая радиолокационная станция работает с последовательным обзором по гибкой программе. При обнаружении цели антенная решетка формирует однолучевую диаграмму направленности, перемещение которой производится с помощью управляющих сигналов, вырабатываемых ЭЦВМ. Для обнаружения обычно используют процедуру усеченного последовательного анализа, при которой время принятия решения ограничено, т.е. если накопленный сигнал находится между порогами, то команда на поворот диаграммы направленности вырабатывается через определенный временной интервал. При превышении накопленным сигналом верхнего порога фиксируется наличие сигнала цели, производят измерение, съем параметров сигнала и вырабатывается команда на смещение диаграммы направленности. Если сигнал меньше нижнего порога, вырабатывается команда на смещение диаграммы направленности. В процессе сопровождения диаграмма направленности направляется на экстраполированные точки траекторий целей. С выхода устройства первичной обработки снимаются коды, пропорциональные величине дальности, скорости, смещения цели по азимуту, углу места.
Недостатком таких радиолокационных станций являются невозможность обнаруживать и сопровождать наземные цели и их комбинации с воздушными в просматриваемой зоне обзора.
Технический результат предлагаемого изобретения заключается в достижении возможности обнаружения, захвата и сопровождения как нескольких воздушных, так и нескольких наземных целей и их различных комбинаций в просматриваемой зоне обзора.
Сущность предлагаемого изобретения состоит в том, что бортовая радиолокационная станция для самолетной системы управления вооружением содержит фазированную антенную решетку, антенно-волноводную систему, антенно-волноводный переключатель, приемник, передатчик, причем фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем.
Для достижения поставленной цели в бортовую радиолокационную станцию для самолетной системы управления вооружением дополнительно введены блок управления лучом ФАР, устройство ввода-вывода, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, вычислитель скорости, дальности, пространственных углов цели режима воздух-воздух, вычислитель скорости, дальности, пространственных углов цели режима воздух-поверхность, вычислитель задачи боевого применения, формирователь сигналов для подвесок исполнительных элементов режима воздух-воздух, формирователь сигналов для подвесок исполнительных элементов режима воздух-поверхность, причем передатчик выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, кроме того, приемник выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, а фазированная антенная решетка выполнена с гидроприводом, при этом первый выход приемника соединен с первым входом устройства ввода-вывода, первый выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, выход вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность соединен с первым входом вычислителя задачи боевого применения, первый выход вычислителя задачи боевого применения подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-поверхность, выход которого является первым выходом бортовой радиолокационной станции для самолетной системы управления вооружением, второй выход приемника подключен к первому входу блока управления лучом ФАР, первый выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом, второй выход блока управления лучом ФАР соединен с третьим входом вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность, второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации, второй выход блока управления режимами работы и синхронизации соединен со вторым входом вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, третий выход блока управления режимами работы синхронизации подключен к первому входу антенно-волноводного переключателя, четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность, первый выход коммутатора режима воздух-воздух, воздух-поверхность подключен к третьему входу приемника, второй выход антенно-волноводного переключателя подключен к второму входу приемника, четвертый выход приемника соединен со вторым входом устройства ввода-вывода, второй выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, пятый выход приемника соединен с третьим входом блока управления лучом ФАР, выход вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух соединен со вторым входом вычислителя задачи боевого применения, второй выход вычислителя задачи боевого применения подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-воздух, выход которого является вторым выходом бортовой радиолокационной станции для самолетной системы управления вооружением, пятый выход блока управления режимами работы и синхронизации подключен ко второму входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, третий выход блока управления лучом ФАР подключен к третьему входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, второй выход коммутатора режима воздух-воздух, воздух-поверхность подключен к четвертому входу приемника, третий выход коммутатора режима воздух-воздух, воздух-поверхность соединен с первым входом передатчика, первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, четвертый выход коммутатора режима воздух-воздух, воздух-поверхность соединен со вторым входом передатчика, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя, первый выход антенно-волноводного переключателя соединен с первым входом приемника, третий выход приемника подключен к первому входу блока управления режимами работы и синхронизации, а шестой выход приемника соединен со вторым входом блока управления режимами работы и синхронизации.
На фиг. 1 изображена блок-схема бортовой радиолокационной станции для самолетной системы управления вооружением.
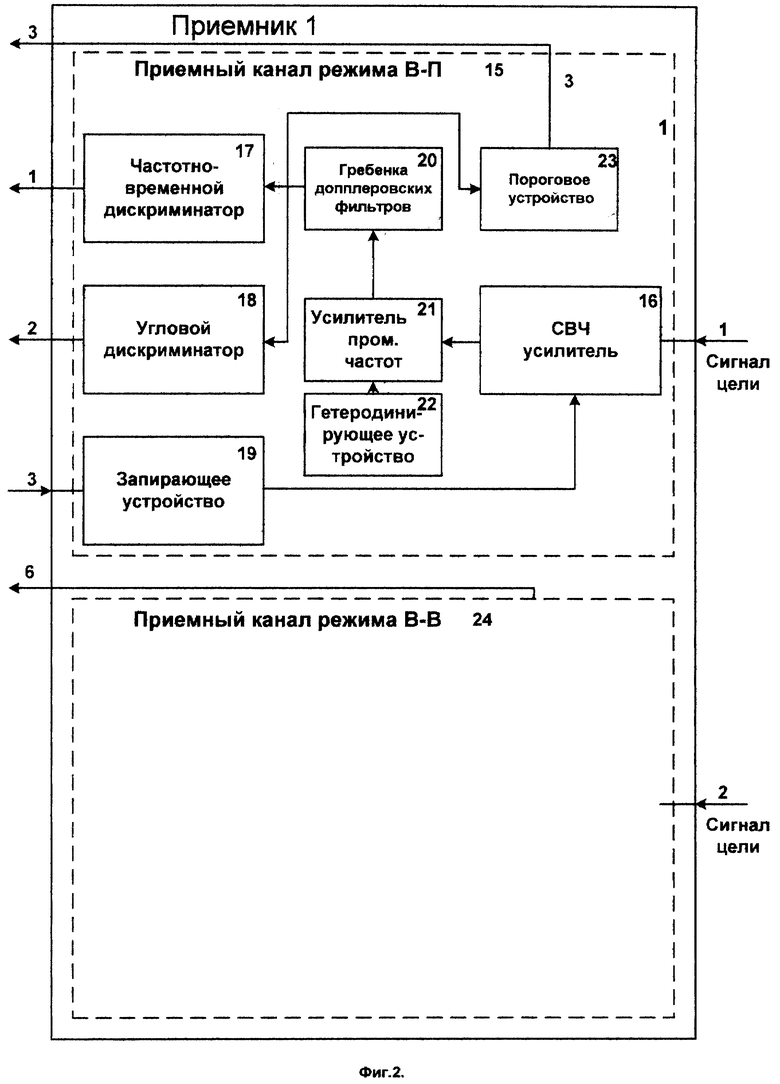
На фиг.2 изображена блок-схема приемника бортовой радиолокационной станции для самолетной системы управления вооружением.
На фиг.3 изображена блок-схема блока управления лучом ФАР.
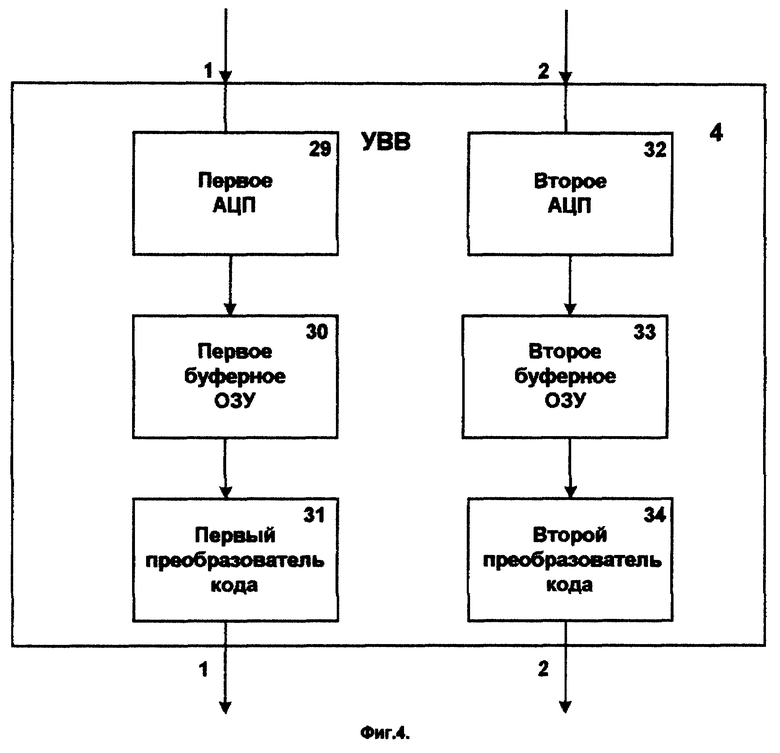
На фиг.4 изображена блок-схема устройства ввода-вывода.
На фиг.5 изображена блок-схема блока управления режимами работы и синхронизации.
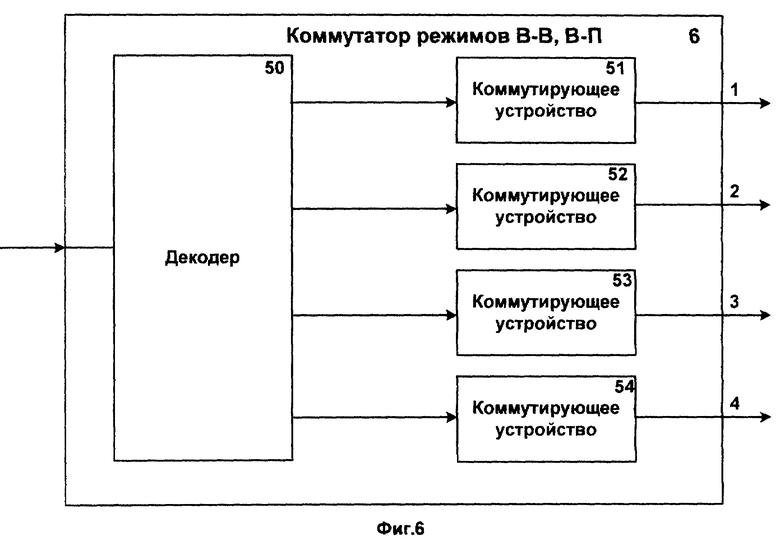
На фиг.6 изображена блок-схема коммутатора режимов воздух-воздух, воздух-поверхность.
На фиг.7 изображена блок-схема передатчика.
На фиг.8 изображена блок схема антенно-волноводного переключателя.
Бортовая радиолокационная станция для самолетной системы управления вооружением состоит из приемника 1, выполненного, например, по схеме, приведенной на фиг.2, блока управления лучом ФАР 2, выполненного, например, по схеме, приведенной на фиг 3, передатчика 3, устройства ввода-вывода (УВВ) 4, выполненного, например, по схеме, приведенной на фиг.4, блока управления режимами работы и синхронизации 5, выполненного, например, по схеме, приведенной на фиг.5, коммутатора режимов воздух-воздух, воздух-поверхность 6, выполненного, например, по схеме, приведенной на фиг.6, антенно-волноводного переключателя (АВП) 7, пример выполнения которого приведен на фиг.8, выполненного в виде двух циркуляторов и переключателя, антенно-волноводной системы (АВС) 8, фазированной антенной решетки (ФАР) с гидроприводом 9, вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух 10, выполненного в виде электронной вычислительной машины (ЭВМ), вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность 11, выполненного в виде ЭВМ, вычислителя задачи боевого применения 12, выполненного в виде ЭВМ, формирователя сигналов подвесок для исполнительных элементов режима воздух-воздух 13, формирователя сигналов для подвесок исполнительных элементов режима воздух-поверхность 14.
Приемник 1, пример которого приведен на фиг.2, содержит два канала, один из которых работает в режиме воздух-поверхность, а другой - в режиме воздух-воздух. Каждый из каналов состоит из СВЧ усилителя 16, частотно-временного дискриминатора 17, углового дискриминатора 18, запирающего устройства 19, гребенчатого доплеровского фильтра 20, усилителя промежуточной частоты (УПЧ) 21, гетеродинирующего устройства 22, порогового устройства 23. Блок управления лучом ФАР 2, пример которого приведен на фиг.3, состоит из генератора токов 25, преобразователя 26, вычислителя положения луча ФАР в пространстве 27, формирователя сигнала, пропорционального времени изменения положения луча ФАР 28. Устройство ввода-вывода 4, пример которого приведен на фиг.4, состоит из первого аналого-цифрового преобразователя (АЦП) 29, первого буферного ОЗУ 30, первого преобразователя кода 31, второго аналого-цифрового преобразователя 32, второго буферного ОЗУ 33, второго преобразователя кода 34.
Блок управления режимами работы и синхронизации 5, пример которого приведен на фиг.5, состоит из пульта управления режимами бортовой радиолокационной станции с индикатором пульта управления режимами БРЛС 35, оперативного запоминающего устройства 36, состоящего из набора ячеек памяти и шины, формирователя импульса фазирования ФАР 37, формирователя тактовых импульсов режима воздух-поверхность 38, формирователя импульса запуска передатчика 39, формирователя тактовых импульсов режима воздух-воздух 40, умножителей частоты 41, 42, 43, 44, стробирующих устройств 45, 46, 47, 48, генератора опорной частоты 49.
Коммутатор режимов воздух-воздух, воздух-поверхность, пример которого приведен на фиг.6, состоит из декодера 50, по команде с оперативного ОЗУ 36, формирующего управляющие сигналы в соответствии с параметрами (частотой повторения импульсов, их длительностью и скважностью) временной диаграммы, для коммутирующих устройств 51, 52, 53, 54, отключающихся после окончания информационного слова, например, при включении на выходе каждого коммутирующего устройства триггера.
Передатчик, пример которого приведен на фиг.7, состоит из передающего канала режима воздух-поверхность 55 и передающего канала режима воздух-воздух 56, каждый из которых выполнен, например, по схеме, приведенной в [4] стр. 24, и состоит из последовательно соединенных задающего генератора, на вход которого подается сигнал с соответствующего выхода коммутатора режима ВВ-ВП 6, усилителя, умножителя частоты, мощного усилителя, ко второму входу которого подключен модулятор, а выход соединен с входом циркулятора антенно-волноводного переключателя 7.
Антенно-волноводный переключатель 7, пример выполнения которого приведен на фиг. 8, состоит из циркуляторов 55,56 и переключателя 57. На вход переключателя 57, являющийся первым входом АВП 7, поступает сигнал с блока управления режимами работы и синхронизации, переключающий приемник и передатчик одного режима, а на входы циркуляторов 55 и 56 поступают соответственно сигналы с выходов передающего канала воздух-воздух, воздух поверхность передатчика 3.
Фазированная антенная решетка с гидроприводом 9 взаимосвязана с антенно-волноводной системой 8, которая в свою очередь взаимосвязана с антенно-волноводным переключателем 7, первый выход которого подключен к входу СВЧ усилителя 16 приемного канала режима воздух-поверхность 15 приемника 1, первый выход приемника 1 соединен с входом АЦП 29 устройства ввода-вывода 4, выход первого преобразователя кода 31 устройства ввода-вывода 4 подключен к первому входу вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность 11, первый выход вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность 11 соединен с входом вычислителя задачи боевого применения 12, первый выход вычислителя задачи боевого применения 12 подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-поверхность 14, выход которого является первым выходом бортовой радиолокационной станции для самолетной системы управления вооружением. Второй выход приемника 1 подключен к первому входу блока управления лучом ФАР 2, первый выход блока управления лучом ФАР 2 соединен с управляющим входом ФАР с гидроприводом 9. Второй выход блока управления лучом ФАР 2 соединен с третьим входом вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность 11, второй вход блока управления лучом ФАР 2 подключен к первому выходу блока управления режимами работы и синхронизации 5, второй выход блока управления режимами работы и синхронизации 5 соединен со вторым входом вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность 11, третий выход блока управления режимами работы и синхронизации 5 подключен к первому входу антенно-волноводного переключателя 7, четвертый выход блока управления режимами работы и синхронизации 5 соединен шиной со входом коммутатора режимов воздух-воздух, воздух-поверхность 6, первый выход коммутатора режимов воздух-воздух, воздух-поверхность 6 подключен к третьему входу приемника 1.
Второй выход антенно-волноводного переключателя 7 подключен ко второму входу приемника 1, четвертый выход приемника 1 соединен с входом второго АЦП 32 устройства ввода-вывода 4. Выход второго преобразователя кода 34 устройства ввода-вывода 4 подключен к первому входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух 10, пятый выход приемника 1 соединен с третьим входом блока управления лучом ФАР 2, выход вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух 10 соединен со вторым входом вычислителя задачи боевого применения 12, второй выход вычислителя задачи боевого применения 12 подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-воздух 13, выход формирователя сигналов для подвесок исполнительных элементов режима воздух-воздух 13 является вторым выходом бортовой радиолокационной станции для самолетной системы управления вооружением.
Пятый выход блока управления режимами работы и синхронизации 5 подключен ко второму входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух 10, третий выход блока управления лучом 2 подключен к третьему входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух 10. Второй выход коммутатора режимов воздух-воздух, воздух-поверхность 6 подключен к четвертому входу приемника 1. Третий выход коммутатора режимов воздух-воздух, воздух-поверхность 6 соединен с первым входом передатчика 3, первый выход передатчика 3 подключен ко второму входу антенно-волноводного переключателя 7, четвертый выход коммутатора режимов воздух-воздух, воздух-поверхность соединен со вторым входом передатчика 3, четвертый выход передатчика 3 подключен к третьему входу антенно-волноводного переключателя 7. Третий выход приемника 1 соединен с первым входом блока управления режимами работы и синхронизации 5, а шестой выход приемника 1 подключен ко второму входу блока управления режимами работы и синхронизации 5.
Бортовая радиолокационная станция для самолетной системы управления оружием имеет несколько режимов работы, в частности режим воздух-воздух, воздух-поверхность и комбинированный режим. Обработка и формирование сигнала осуществляется в реальном масштабе времени. По сигналам, поступающим с приемника 1, на индикаторе пульта управления режимами БРЛС с индикатором 35 возникают отметки цели. В зависимости от положения отметки цели, определяемой визуально оператором по индикатору пульта управления режимами БРЛС с индикатором 35, с пульта управления режимами бортовой радиолокационной станции 35 блока управления режимами работы и синхронизации 5 выдаются команды, поступающие по шине на оперативное ОЗУ 36, выбирается тот или иной режим работы в виде разовых команд, например работа только по наземным целям или только по воздушным целям или комбинированный режим по нескольким воздушным и наземным целям. По этим командам в блоке управления режимами работы и синхронизации 5 из оперативного ОЗУ 36 выбираются заранее определенные сигналы, пропорциональные численным параметрам (длительности импульсов, частоте повторения, скважности) временной диаграммы работы радиолокационной станции для самолетной системы управления вооружением, которые поступают в соответствующие выбранному режиму стробирующие устройства, на другой вход которых поступает синусоидальный сигнал с генератора опорной частоты 49. Далее с выходов стробирующих устройств сигналы поступают на соответствующие умножители, в которых частота последовательности импульсов умножается на коэффициент умножения, соответствующий каждому из режимов работы бортовой радиолокационной станции для самолетной системы управления вооружением, и далее подаются на соответствующие формирователи импульсов, либо 37, либо 38, либо 39, либо 40. Например, в случае подачи сигнала с умножителя частоты 41 на формирователь импульсов фазирования ФАР 37 на нем формируется сигнал, определяющий начало фазирования, положение луча ФАР в пространстве, и подается на вычислитель сигнала, пропорционального положению луча в пространстве 27 блока управления ФАР 2.
В ОЗУ вычислителя положения луча в пространстве 27 записаны углы, характеризующие положение луча ФАР в пространстве по осям Х и Y, Qx, Qy, которые в зависимости от сигнала, поступающего с формирователя импульсов фазирования ФАР 37, поступают либо на вычислитель скорости, дальности, пространственных углов цели режима ВВ 10, либо на вычислитель скорости, дальности, пространственных углов режима ВП 11.
Для управления фазой излучаемых ФАР электромагнитных колебаний в арифметическом устройстве вычислителя положения луча ФАР в пространстве 27 вычисляются сигналы, пропорциональные фазам излучаемых электромагнитных колебаний по следующему алгоритму (для ФАР, состоящей из излучающих элементов, расположенных строчно-столбцовым методом) стр.14 [ 3]
ϕmn = 2π/λ(ndcosQx+mdcosQy)
где m - номер строки,
n - номер столбца,
λ - длина волны,
d - расстояние между излучающими элементами, которые затем после преобразования в аналоговую форму в преобразователе 26 управляют током генератора токов 25, ток которого в свою очередь, протекая через фазовращатели ФАР, изменяют их фазы. На формирователь сигнала, пропорционального времени изменения положения луча ФАР 28 блока управления лучом ФАР 2, поступает в зависимости от выбранного режима работы сигнал с углового дискиминатора приемного канала режима воздух-поверхность 15 приемника 1 либо с углового дискриминатора приемного канала режима воздух-воздух 24 приемника 1, соответствующий определенному моменту времени. Формирователь сигнала, пропорционального времени изменения положения луча ФАР 28, формирует сигнал, соответствующий данному моменту времени и определенному положению луча ФАР в пространстве, который далее управляет током в генераторе токов 25.С генератора токов 25 блока управления лучом ФАР 2 сигнал подается на фазовращатели (управляющий вход) ФАР с гидроприводом 9 для корректировки положения диаграммы направленности ФАР в пространстве. Выполнение фазированной антенной решетки с гидроприводом позволяет расширить углы прокачки и повысить вероятность обнаружения целей на максимальной дальности.
С формирователя импульсов запуска передатчика 39 блока управления режимами работы и синхронизации 5 подаются импульсы, управляющие антенно-волноводным переключателем 7, подключающим либо передатчик 3, либо приемник 1. Одновременно с блока управления режимами работы и синхронизации 5 сигнал поступает на коммутатор режима воздух-воздух, воздух-поверхность, коммутирующий режимы воздух-поверхность, воздух-воздух.
После излучения сигнала в пространство и приема отраженного от цели сигнала работа бортовой радиолокационной станции для самолетной системы управления вооружением далее осуществляется следующим образом. Команда на переключение режима работы воздух-поверхность или воздух-воздух выдается оператором по результатам работы бортовой радиолокационной станции для самолетной системы управления оружием, при превышении сигнала над пороговым значением и поступающего с порогового устройства 23 приемного канала режима воздух-поверхность приемника 1, либо с порогового устройства приемного канала воздух-воздух приемника 1, и отображенным на индикаторе пульта управления режимами бортовой радиолокационной станции 35 блока управления режимами работы и синхронизации 5. По изображению, полученному с индикатора, оператор принимает решение об обнаружении, захвате и сопровождении цели.
С формирователя тактовых импульсов режима воздух-поверхность 38 блока управления режимами работы и синхронизации 5 поступают импульсы, регламентирующие работу вычислителя скорости, дальности, пространственных углов цели режима воздух- поверхность 11, куда одновременно поступает сигнал с устройства ввода-вывода 4, пропорциональный дальности и скорости цели, а с вычислителя положения луча ФАР в пространстве 27 - сигналы, пропорциональные пространственным углам цели. На вычислитель скорости, дальности, пространственных углов цели 11 режима воздух-поверхность приходят сигналы, происходит вычисление характеристик цели: дальности до цели по значению амплитуды сигнала, подаваемого с приемника 1[1] стр.12
где Еt - энергия излученного сигнала,
Gt - коэффициент усиления антенны,
ϑ - эффективная площадь рассеяния цели,
Ar - эффективная площадь антенны,
К - постоянная Больцмана,
Т0 - абсолютная температура,
Fn - фактор шума приемника,
E/N0 - заданное соотношение сигнал/шум,
радиальной скорости цели по сигналу, приходящему с приемника 1 и пропорциональному доплеровскому смещению частоты [5] стр.71:
где  - скорость движения цели по направлению к радиолокационной станции;
- скорость движения цели по направлению к радиолокационной станции;
Fд - доплеровский сдвиг частоты, измеряемой РЛС,
Fн - частота излученного сигнала,
С - скорость света
Определение углового положения цели при использовании остронаправленных антенн осуществляется в вычислителе скорости, дальности, пространственных углов цели режима воздух-воздух 10 путем сравнения сигналов при различных угловых положениях антенны. В случае сканирования одиночной диаграммы направленности, когда она проходит направление на цель, на выходе приемника фиксируется максимальный уровень сигнала.
Угловое положение антенны, отсчитываемое от принятого нуля, при котором сигнал имеет максимальную амплитуду, принимается за точное направление на цель в плоскости, в которой осуществляется сканирование [5] стр.58.
Сигналы, пропорциональные вычисленным характеристикам, затем последовательно поступают на вычислитель задачи боевого применения 12, где по ним вычисляют центр зоны обзора и ее размеры в угловых координатах, осуществляют пересчет параметров цели в различных системах координат для ракет с различными методами наведения, выстраивают обнаруженные и сопровождаемые цели в ряд по степени их опасности, производят завязку трасс полета цели. В зависимости от результатов вычисления этих характеристик в формирователе сигналов для подвесок исполнительных элементов режима воздух-поверхность формируют сигналы, определяющие типы ракет для конкретной цели и начальные условия целеуказания для головок самонаведения ракет.
В режиме воздух-воздух бортовая радиолокационная станция для самолетной системы управления работает аналогичным образом за исключением изменения параметров временной диаграммы и подключения коммутатором режима воздух-воздух, воздух-поверхность 6 по команде оператора с блока управления режимами работы и синхронизации 5 приемного канала режима воздух-воздух 24 приемника 1, передающего канала режима воздух-воздух передатчика 3, вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух 10, а также формирователя сигналов для исполнительных элементов режима воздух-воздух 13.
В случае комбинированного режима, обработка и формирование сигнала в котором осуществляется в реальном масштабе времени, с пульта управления режимами бортовой радиолокационной станции 35 на оперативное ОЗУ 36 поступает команда от оператора на подключение соответствующих этому режиму ячеек памяти и вся система переходит в режим последовательного обзора попеременно то воздушного, то наземного пространства, при этом подключаются то передающий канал режима воздух-поверхность передатчика 3, то приемный канал режима воздух-поверхность 15 приемника 1, вычислитель скорости, дальности, пространственных углов цели режима воздух-поверхность 11 и формирователь сигналов для подвесок исполнительных элементов режима воздух-поверхность 14, то передающий канал режима воздух-воздух передатчика 3, то приемный канал режима воздух-воздух 24, вычислитель скорости, дальности, пространственных углов цели режима воздух-воздух 10 и формирователь сигналов для подвесок исполнительных элементов режима воздух-воздух 13. Общее время работы бортовой радиолокационной станции для самолетной системы управления вооружением в комбинированном режиме не превышает время обзора и перераспределяется в зависимости от количества обнаруженных наземных и воздушных целей.
Таким образом, бортовая радиолокационная станция для самолетной системы управления вооружением позволяет обнаруживать, захватывать и сопровождать в просматриваемой зоне только наземные или только воздушные цели и их комбинации, например одну воздушную и три наземные цели, две воздушные и две наземные цели, три воздушные и одну наземную цель.
Литература:
1. Теоретические основы радиолокации. Под редакцией профессора Я.Д. Ширмана, Издательство "Советское радио", г. Москва, 1970 г.
2. В. Н. Ветлинский, Г.Н. Ульянов. "Многоцелевые РЛС". Ордена Трудового Красного Знамени Военное издательство Министерства Обороны СССР. г. Москва 1975 г.
3. М.С. Нейман. Курс радиопередающих устройств. Издательство "Советское радио". Москва 1965 г.
4. Зарубежная радиоэлектроника, 2, 1982 год, Москва "Радио и связь"
5. Д. Бартон. Радиолокационные системы. Москва 1967 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовая радиолокационная станция | 2019 |
|
RU2719547C1 |
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |
| Система целераспределения подвижных объектов | 2018 |
|
RU2686455C1 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
| УСТРОЙСТВО НАЗЕМНОГО КОНТРОЛЯ РАДИОЛОКАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ | 2000 |
|
RU2174238C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2001 |
|
RU2206102C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2019 |
|
RU2729704C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |




Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на подвижных объектах. Достигаемым техническим результатом является обнаружение, захват и сопровождение как нескольких воздушных, так и нескольких наземных целей и их различных комбинаций в просматриваемой зоне обзора. Бортовая радиолокационная станция для управления системой вооружения содержит фазированную антенную решетку, антенно-волноводный переключатель, приемник и передатчик, блок управления лучом ФАР, устройство ввода-вывода, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, вычислитель скорости, дальности, пространственных углов цели режима воздух-воздух, вычислитель скорости, дальности, пространственных углов цели режима воздух-поверхность, вычислитель задачи боевого применения, вычислитель типа подвесок исполнительных элементов режима воздух-воздух, вычислитель типа подвесок исполнительных элементов режима воздух-поверхность, причем передатчик выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, кроме того, приемник выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность. 8 ил.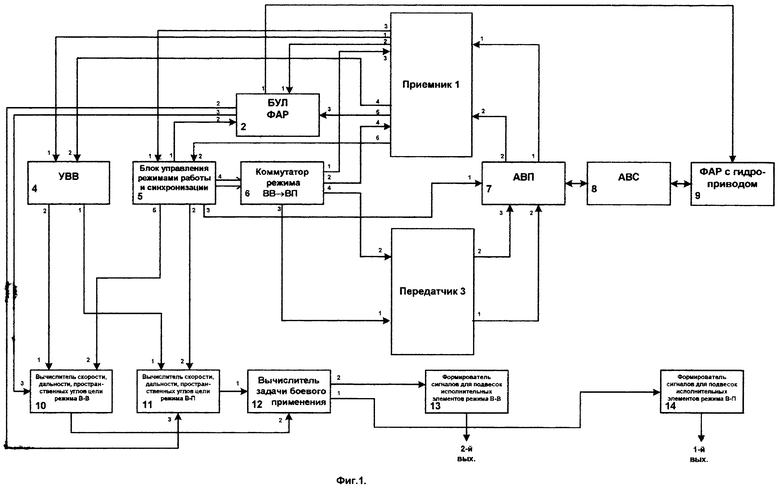
Бортовая радиолокационная станция для самолетной системы управления вооружением, содержащая фазированную антенную решетку (ФАР), антенно-волноводную систему, антенно-волноводный переключатель, приемник и передатчик, причем фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем, отличающаяся тем, что дополнительно введены блок управления лучом ФАР, блок управления режимами работы и синхронизации, устройство ввода-вывода, коммутатор режимов воздух-воздух, воздух-поверхность, вычислитель скорости, дальности, пространственных углов цели режима воздух-воздух, вычислитель скорости, дальности, пространственных углов цели режима воздух-поверхность, вычислитель задачи боевого применения, формирователь сигналов для подвесок исполнительных элементов режима воздух-воздух, формирователь сигналов для подвесок исполнительных элементов режима воздух-поверхность, причем передатчик выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, кроме того, приемник выполнен с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, а фазированная антенная решетка выполнена с гидроприводом, при этом первый выход приемника соединен с первым входом устройства ввода-вывода, первый выход устройства ввода-вывода подключен в первому входу вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, выход вычислителя скорости, дальности, пространственных углов цели режима воздух-поверхность соединен с первым входом вычислителя задачи боевого применения, первый выход вычислителя задачи боевого применения соединен с входом формирователя сигналов для подвесок исполнительных элементов режима воздух-поверхность, выход которого является первым выходом бортовой радиолокационной станции для самолетной системы управления вооружением, второй выход приемника подключен к первому входу блока управления лучом ФАР, первый выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом, второй выход блока управления лучом ФАР соединен с третьим входом вычислителя скорости, дальности пространственных углов цели режима воздух-поверхность, второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации, второй выход блока управления режимами работы и синхронизации соединен со вторым входом вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, третий выход блока управления режимами работы и синхронизации подключен к первому входу антенно-волноводного переключателя, четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режимов воздух-воздух, воздух-поверхность, первый выход коммутатора режимов воздух-воздух, воздух-поверхность подключен к третьему входу приемника, второй выход антенно-волноводного переключателя подключен к второму входу приемника, четвертый выход приемника соединен со вторым входом устройства ввода-вывода, второй выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, пятый выход приемника соединен с третьим входом блока управления лучом ФАР, выход вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух соединен со вторым входом вычислителя задачи боевого применения, второй выход вычислителя задачи боевого применения подключен ко входу формирователя сигналов для подвесок исполнительных элементов режима воздух-воздух, выход которого является вторым выходом бортовой радиолокационной станции для самолетной системы управления вооружением, пятый выход блока управления режимами работы и синхронизации подключен ко второму входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, третий выход блока управления лучом ФАР подключен к третьему входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, второй выход коммутатора режимов воздух-воздух, воздух-поверхность подключен к четвертому входу приемника, третий выход коммутатора режимов воздух-воздух, воздух-поверхность соединен с первым входом передатчика, первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, четвертый выход коммутатора режимов воздух-воздух, воздух-поверхность соединен со вторым входом передатчика, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя, первый выход антенно-волноводного переключателя соединен с первым входом приемника, третий выход приемника соединен с первым входом блока управления режимами работы и синхронизации, а шестой выход приемника подключен ко второму входу блока управления режимами работы и синхронизации.
| ВЕТЛИНСКИЙ В.Н., УЛЬЯНОВ Г.Н., Многоцелевые РЛС | |||
| - М.: Воениздат МО СССР, 1975, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| US 5864314 A, 26.01.1999 | |||
| US 5999118 A, 07.12.1999 | |||
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |

