Изобретение относится к области медицины, а именно к эндоскопической хирургии, и предназначено для обеспечения адекватного хирургического доступа к оперируемым органам при эндоскопической процедуре (лапароскопии, торакоскопии и др.).
Известен способ обеспечения эндоскопического доступа к органам брюшной полости, например, к желчному пузырю, путем нескольких пункций брюшной стенки для проведения инструментов в эмпирически выбранных относительно стандартных точках [1]. Также известен способ выбора точек введения инструментов в полость, который предусматривает, что оптическая ось эндоскопа должна быть перпендикулярна плоскости вмешательства в точке наиболее ответственного этапа операции; угол между двумя соседними инструментами должен стремиться к значению в 45 градусов; главная плоскость инструментов должна располагаться на линии операции [2].
Однако известные аналог и прототип не учитывают индивидуальные анатомические особенности топографии органов и взаиморасположение их по отношению к стенкам полости, а также положение хирурга. При рекомендуемом расположении соседних инструментов под углом 45 градусов значительно затрудняется взаимодействие между ними и повышается риск электрохирургической травмы вследствие короткого замыкания, возникают условия, при которых инструмент попадает между объектами эндоскопа и объектом вмешательства и закрывает его. Кроме того, известные способы не определяют оптимальную зону установки эндоскопа, которая по расчетам [2] является точкой отсчета для измерения углов и мест проведения остальных пункций, а рокировка инструментов, при которой возможно возникновение зеркального визуального контроля, не предопределена в плане изменения углов после нее. Указанные недостатки существенно затрудняют прецизионность хирургических эндоскопических вмешательств и повышают риск развития осложнений.
Целью заявляемого способа является обеспечение оптимального эндоскопического доступа к оперируемым органам.
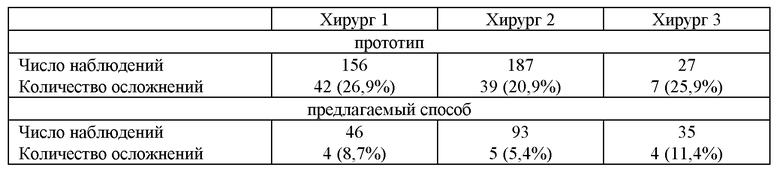
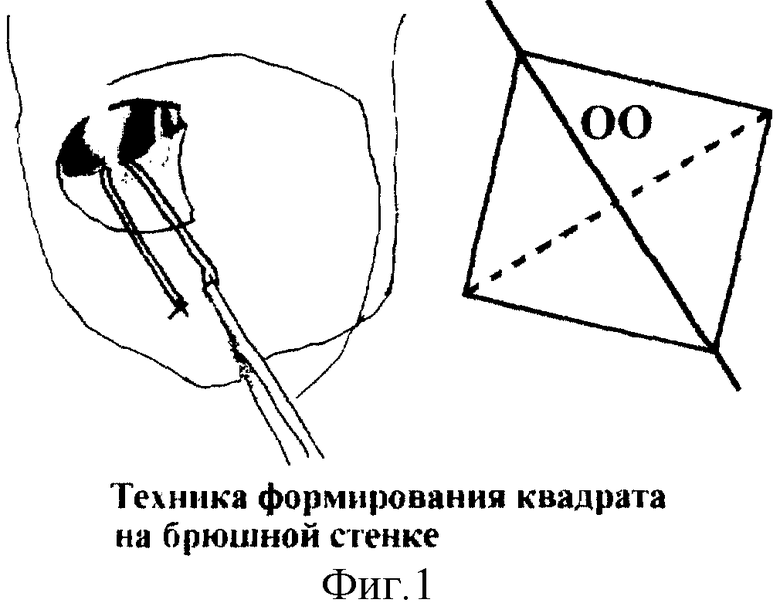
Указанная цель достигается тем, что после определения точки введения эндоскопа и инсуфляции газа в полость (обеспечения операционного пространства в полости), исходя из индивидуального расположения оперируемого органа, под визуальным контролем определяют оптимальные точки введения всех инструментальных троакаров с проецированием их на поверхность тела. При этом адекватным для выполнения манипуляций внутри полости и оптимальным для эргономики движений рук хирурга вне ее является проведение инструментов таким образом, чтобы угол между ними был близок к 90 градусам. Это условие обеспечивается формированием на поверхности тела пациента квадрата, в противоположных углах которого на одной диагонали располагаются эндоскоп и зона наиболее ответственных манипуляций, а на другой диагонали - точки введения основных инструментальных троакаров (фиг.1). Построение на стенке полости квадрата обеспечивается посредством использования замкнутой и сложенной вдвое полоски из гибкого материала, которую в сложенном виде растягивают между точками введения эндоскопа и проекцией на стенку полости наиболее ответственной зоны вмешательства, а затем растягивают в перпендикулярном положении с формированием квадрата. С точки зрения обеспечения оптимального эндохирургического доступа и визуального контроля за проведением операции достигают одновременное совпадение направлений оптической оси троакаров, глаз хирурга, видеомонитора и диагонали квадрата для двух главных инструментальных троакаров. При необходимости, связанной с индивидуальным строением полости и расположением зоны наиболее ответственных хирургических действий, диагональ введения главных инструментальных троакаров смещают от визуальной оси эндоскопа на угол, не превышающий 90 градусов, также с формированием квадрата (фиг. 2).
Предлагаемый способ соответствует критерию "новизна", так как в отличие от аналога и прототипа обладает следующими существенными отличительными признаками:
- используют оптимальное с точки зрения электробезопасности удобство манипуляций с инструментами и достижения адекватной возможности вмешательства на оперируемом органе расположение троакаров под углом 90 градусов;
- оптимальные точки введения инструментальных троакаров проецируют на поверхность тела пациента с учетом конкретных анатомических особенностей внутреннего расположения зоны воздействия, определенной при эндоскопии;
- оптимальные точки введения инструментальных троакаров избирают таким образом, чтобы достигалось полное совпадение направлений оптической оси эндоскопа, глаз хирурга и видеомонитора, а также соответствие этому направлению оси главных инструментальных троакаров;
- точки введения инструментальных троакаров определяют путем их проецирования на поверхность тела;
- для точного определения мест введения основных инструментальных троакаров на поверхности тела, исключения необходимости измерения углов и расстояний, а также сокращения времени выполнения операционного доступа формируют квадрат на поверхности тела;
- формирование квадрата осуществляют путем использования полоски из гибкого материала, которая в сложенном виде растягивается между эндоскопом и проекцией зоны операции на поверхности тела, с последующим растяжением по другой диагонали квадрата.
Благодаря наличию указанных отличительных действий в предлагаемом способе, а также использованию их в совокупности и определенной последовательности действий можно сделать вывод о соответствии заявляемого способа изобретательскому уровню.
Предлагаемый способ осуществляют следующим образом. После создания операционного пространства в полости известным способом [1] на поверхности тела пациента проецируют квадрат; ориентированный в косом направлении; при этом одну из его диагоналей располагают по оптической оси, а противоположный от места введения эндоскопа угол ориентируют на область оперативного вмешательства. После этого между эндоскопом и зоной операции, определенной под контролем эндоскопа, натягивают кольцо из любого гибкого материала (например, нить). На середине между этими двумя точками кольцо растягивают в перпендикулярном направлении и из него формируется квадрат (фиг.1). Противоположные углы квадрата помечают стерильным красителем (например, бриллиантовым зеленым) и в дальнейшем используют как точки введения основных инструментальных троакаров. Тем самым задается направление оптимальных углов наклона инструментальных троакаров по отношению к оптической оси и между ними.
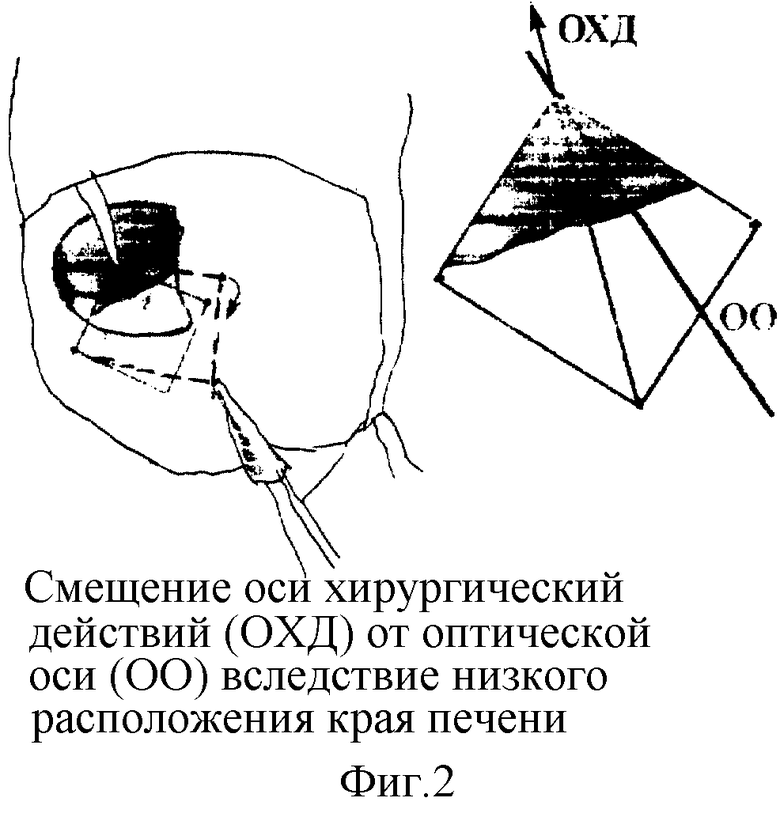
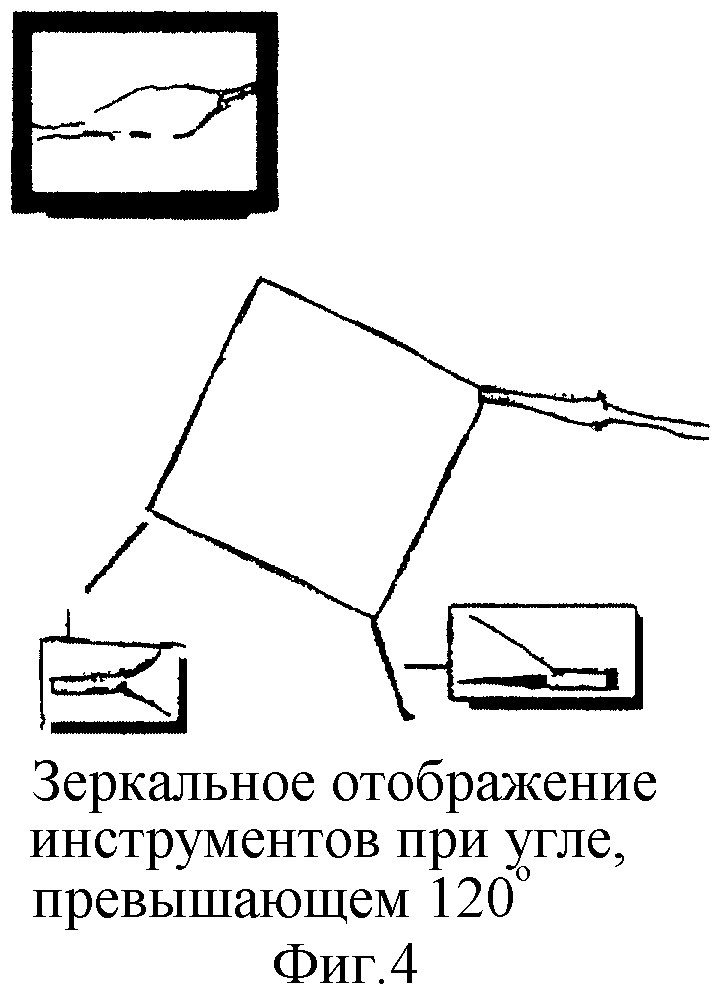
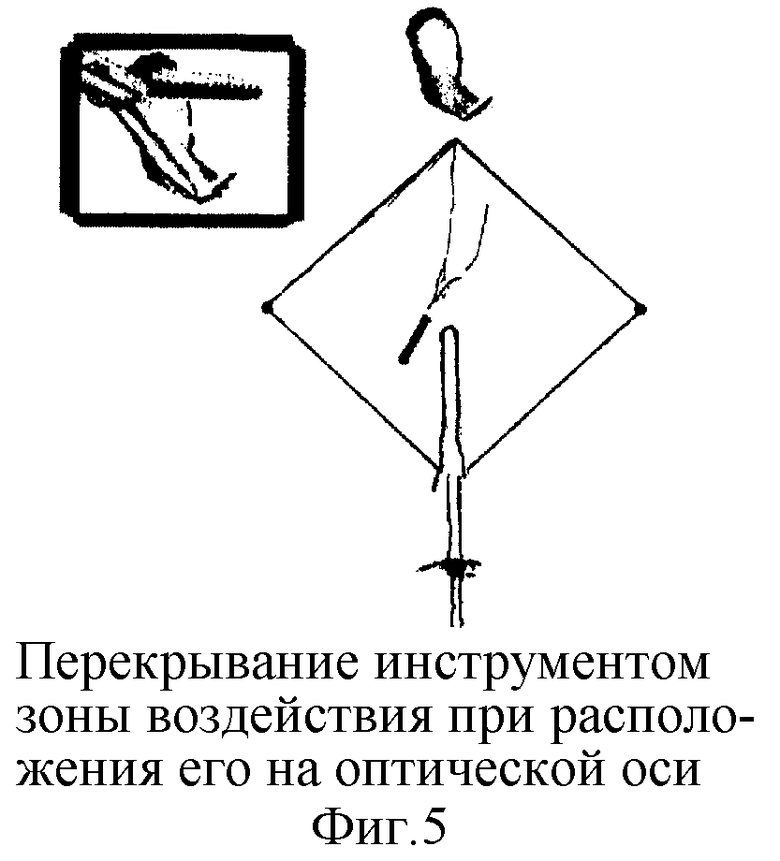
Более близкое расположение троакаров, как происходит при использовании прототипа, соответственно уменьшает эти углы и приводит к "перекрещиванию" инструментов, затрудняет их взаимодействие, особенно при завязывании интракорпоральных узлов. Кроме того, близкое, практически параллельное расположение двух инструментов может приводить к электрическому замыканию и повышает риск электрохирургической травмы органов. Наоборот, при увеличении угла между инструментами и оптической осью эндоскопа более 90 градусов возникает необходимость в проведении манипуляций в неудобном положении рук хирурга, что существенно ухудшает прецизионность действий (фиг.3). При значительном увеличении угла между оптической осью и инструментальными троакарами более 120-130 градусов возникает феномен "зеркального", отраженного контроля над перемещением инструментов (фиг.4), что вызывает необходимость мысленно перерассчитывать смещение рабочей части инструмента и противоположную сторону по сравнению с визуально ожидаемой, и значительно затрудняет возможность манипулирования. Неприемлемо и проведение инструментов непосредственно по линии визуальной оси; при этом инструмент оказывается между объективом эндоскопа и зоной вмешательства и может полностью перекрывать всю область, в которой нужно проводит операционные действия (рис.5).
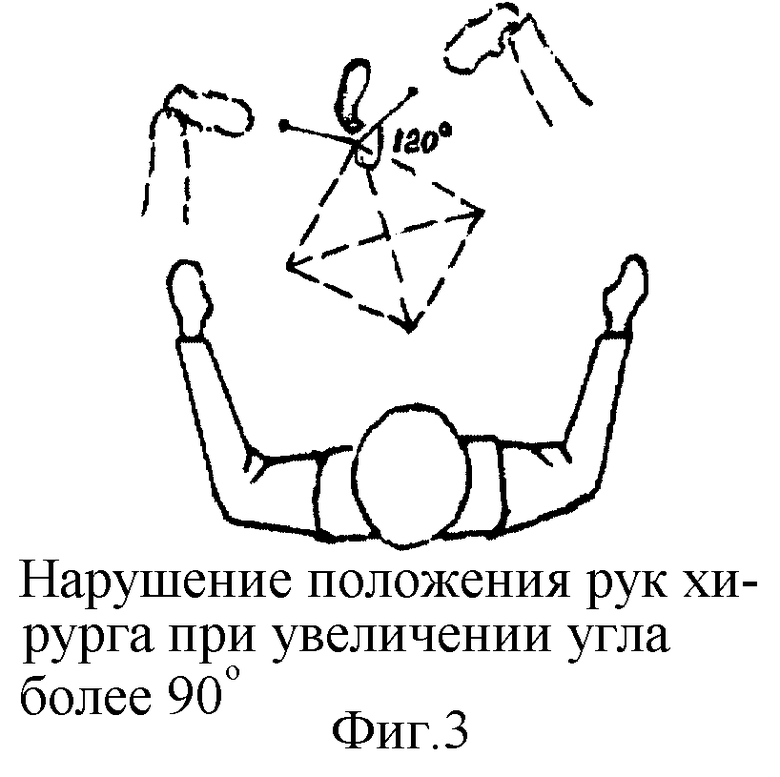
Применение предлагаемого способа, а также прототипа осуществлено тремя хирургами, имеющими различный опыт работы в эндоскопической хирургии. Результаты их применения, количество возникших при этом осложнений представлены в таблице (р< 0,01-0,05). В графе осложнения учтены все интраоперационные осложнения, вынужденные операционные действия, обусловленные техникой вмешательства, и конверсия доступа, без учета их влияния на послеоперационное течение заболевания.
Как следует из таблицы, использование предлагаемого способа достоверно сокращает количество интраоперационных осложнений.
Приводим клинические примеры использования прототипа (пример 1) и заявляемого способа (примеры 2, 3).
Пример 1. Больной Х., 37 лет, клинический диагноз - хронический калькулезный холецистит. Произведена операция лапароскопическая холецистэктомия. Выбор точек введения основных инструментальных лапаропортов осуществлялся эмпирически, приблизительно в соответствии с точками введения и измерением углов, рекомендуемыми прототипом. Во время выделения пузырного протока и его клинирования вследствие перекрывания поля зрения клипсаппликатором произошло иссечение общего желчного протока, что потребовало выполнения лапаротомии, наложения гепатикоеюноанастомоза на транспеченочном дренаже и привело к инвалидизации пациента.
Пример 2. Больной С., 56 лет, клинический диагноз - хронический пиелонефрит, вторично сморщенная почка. Операция - лапароскопическая нефрэктомия. Обеспечение операционного доступа в соответствии с предлагаемым способом. Интраоперационных осложнений не наблюдалось.
Пример 3. Больной Ф., 19 лет, клинический диагноз - гемолитическая анемия. Операция - лапароскопическая спленэктомия. Обеспечение операционного доступа проведено в соответствии с предлагаемым способом. Интраоперационных осложнений не было.
Таким образом, применение предлагаемого способа обеспечивает оптимальный эндоскопический доступ к оперируемым органам.
Литература:
1. Нечитайло М.Е., Литвиненко А.Н., Дяченко В.В. и др. // Анналы хирургической гепатологии. - 1998. - Том 3, - 3. - С. 16-19.
2. Шнитко С.Н., Стринкевич А.Л. // Эндоскопическая хирургия. - 1999. - 2. - С. 75-76.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ РАССТАНОВКИ ТРОАКАРОВ ПРИ ЛАПАРОСКОПИЧЕСКИХ ОПЕРАЦИЯХ НА БРЮШНОМ ОТДЕЛЕ АОРТЫ И ЕЕ ВЕТВЯХ | 2016 |
|
RU2618658C1 |
| СПОСОБ ЛАПАРОСКОПИЧЕСКОЙ АДРЕНАЛЭКТОМИИ | 1997 |
|
RU2175216C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ ОПТИМАЛЬНОЙ УСТАНОВКИ МАНИПУЛЯЦИОННЫХ ТРОАКАРОВ ПРИ ЛАПАРОСКОПИЧЕСКИХ ОПЕРАЦИЯХ НА ОРГАНАХ ЗАБРЮШИННОГО ПРОСТРАНСТВА | 2006 |
|
RU2338481C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭНДОСКОПИЧЕСКОГО ДОСТУПА | 2005 |
|
RU2284759C1 |
| СПОСОБ ПОЯСНИЧНОЙ ВНЕБРЮШИННОЙ СИМПАТЭКТОМИИ | 2001 |
|
RU2209600C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВЫПОЛНЕНИЯ ЛАПАРОСКОПИЧЕСКИХ ВМЕШАТЕЛЬСТВ ПО ЛИФТИНГОВОЙ ТЕХНОЛОГИИ У БОЛЬНЫХ С СОПУТСТВУЮЩЕЙ ПАТОЛОГИЕЙ | 1999 |
|
RU2162299C1 |
| СПОСОБ ВЫБОРА ТОЧЕК ВВЕДЕНИЯ ТРОАКАРОВ ПРИ ВЫПОЛНЕНИИ ЛАПАРОСКОПИЧЕСКОЙ СОЧЕТАННОЙ ОПЕРАЦИИ | 2004 |
|
RU2286742C2 |
| СПОСОБ ПЕРЕВЯЗКИ ЯИЧКОВОЙ ВЕНЫ В НИЖНЕЙ ТРЕТИ ИЗ МИНИ ДОСТУПА | 2002 |
|
RU2222267C2 |
| СПОСОБ ПЛАСТИКИ ПИЩЕВОДА | 2004 |
|
RU2285463C2 |
| УСТРОЙСТВО ДЛЯ ЛАПАРОСКОПИЧЕСКОЙ ПУНКЦИИ ЭХИНОКОККОВЫХ КИСТ ПЕЧЕНИ | 1998 |
|
RU2159088C2 |
Изобретение относится к медицине, а именно к эндоскопической хирургии. Вводят эндоскоп. Определяют зону операции под контролем эндоскопа. Выбирают точки введения инструментальных троакаров. Для этого на поверхность тела проецируют квадрат, натягивая кольцо из гибкого материала между точками введения эндоскопа и проекцией на стенку полости наиболее ответственной зоны вмешательства. Затем растягивают его на середине между этими двумя точками с формированием квадрата, в противоположных углах которого на одной диагонали располагается эндоскоп и зона наиболее ответственных манипуляций, а на другой диагонали - точки введения основных инструментальных троакаров. Осуществляют пункцию стенки полости. Способ позволяет обеспечить оптимальный эндоскопический доступ к оперируемым органам. 1 табл., 5 ил.
Способ обеспечения эндоскопического доступа, включающий введение эндоскопа, определение зоны операции под контролем эндоскопа, выбор точек введения инструментальных троакаров и пункцию стенки полости, отличающийся тем, что на поверхность тела проецируют квадрат, для чего натягивают кольцо из гибкого материала между точками введения эндоскопа и проекцией на стенку полости наиболее ответственной зоны вмешательства, затем растягивают его на середине между этими двумя точками с формированием квадрата, в противоположных углах которого на одной диагонали располагается эндоскоп и зона наиболее ответственных манипуляций, а на другой диагонали - точки введения основных инструментальных троакаров.
| ШНИТКО С.Н., СТРИНКЕВИЧ А.Л | |||
| К вопросу об оптимальности доступа при эндоскопических операциях | |||
| Декабрьские чтения по неотложной хирургии: Сб | |||
| статей | |||
| - Минск, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Вагонетка для кабельной висячей дороги, переносной радиально вокруг центральной опоры | 1920 |
|
SU243A1 |
| САВЕЛЬЕВ B.C | |||
| и др | |||
| Руководство по клинической эндоскопии | |||
| - М., 1985, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
