Изобретение относится к области строительных и дорожных машин и предназначено для обработки незатвердевших бетонных поверхностей, в частности для обработки полов, дорожек, стоянок автотранспорта и подобных им покрытий.
Известна роторная заглаживающая машина, включающая раму, на которой установлены, по крайней мере, два рабочих органа и привод их вращения, причем каждый из рабочих органов выполнен в виде ротора с вертикальным валом вращения, которые, в свою очередь, выполнены с возможностью отклонения от вертикали с помощью рычажной системы, связанной со средствами управления (патент СССР 631080, опубликован 30.10.78, БИ 40 1978г., МПК E 01 C 19/48).
Недостатками этой машины являются сложность в управлении и эксплуатации, а также то, что область применения этой машины ограничена покрытиями большой площади.
Наиболее близким техническим решением по сравнению с заявленным изобретением является роторная заглаживающая машина, включающая соединяющую раму, на которой установлены привод, включающий два двигателя, приводящие во вращение два ротора с вертикальными осями, установленными на дополнительных рамах, прикрепленных к соединяющей раме, систему управления с двумя рукоятками, ограждающий кожух и сиденье для оператора (патент США 5480258, 02.01.96, Е 01 С 19/00).
Недостатком данного устройства является сложность конструкции, сложность в управлении и в силу больших габаритов машина не может обрабатывать значительную часть небольших по площади или сложных по конфигурации покрытий.
Задачей, на которую направленно изобретение, является повышение эффективности работы машины путем расширения области ее применения, а также упрощение конструкции.
Сущность изобретения заключается в том, что в известном устройстве, включающем соединяющую раму, на которой установлены привод, включающий два двигателя, приводящих во вращение два ротора с вертикальными осями вращения, установленные на дополнительных рамах, прикрепленных к соединяющей раме, систему управления с двумя рукоятками, ограждающий кожух и сиденье для оператора, соединяющая рама выполнена разъемной и состоит из переднего и заднего элементов и верхнего элемента, размещенного на них с помощью опорных узлов. Система управления с рукоятками, каждая из которых выполнена разъемной и состоит из верхней и нижних частей, причем нижняя часть рукоятки выполнена полой и ее внутренний диаметр больше либо равен наружному диаметру верхней части рукоятки. Система управления установлена на каждой дополнительной раме посредством устройства для изменения угла наклона рукояток к дополнительной раме, включающего две щеки, в которых соосно друг другу выполнено по одному центральному и нескольким фиксаторным отверстиям, расположенным на одинаковом расстоянии от центрального отверстия, ось, установленную в центральных отверстиях, и проходящую через отверстие, выполненное на нижней части рукоятки управления, фиксаторный палец, установленный в фиксаторных отверстиях и проходящий через фиксаторное отверстие в нижней части рукоятки управления. При этом кожух состоит из двух частей, каждая из которых установлена на соответствующей дополнительной раме и каждая часть содержит каркас и съемный элемент, соединенный с ним. И на противоположных сторонах каждой дополнительной рамы соосно друг другу установлены две цапфы, а на переднем и заднем элементе соединяющей рамы выполнены отверстия таким образом, что их оси лежат в горизонтальной плоскости и параллельны друг другу.
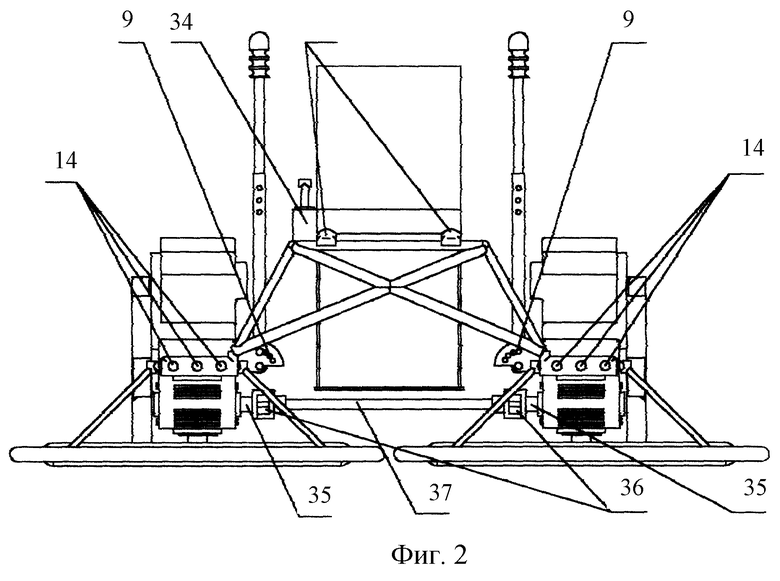
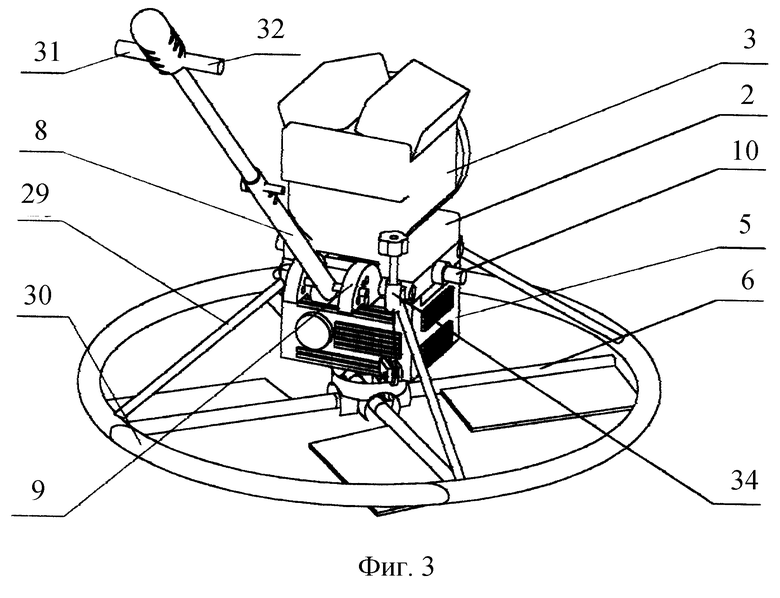
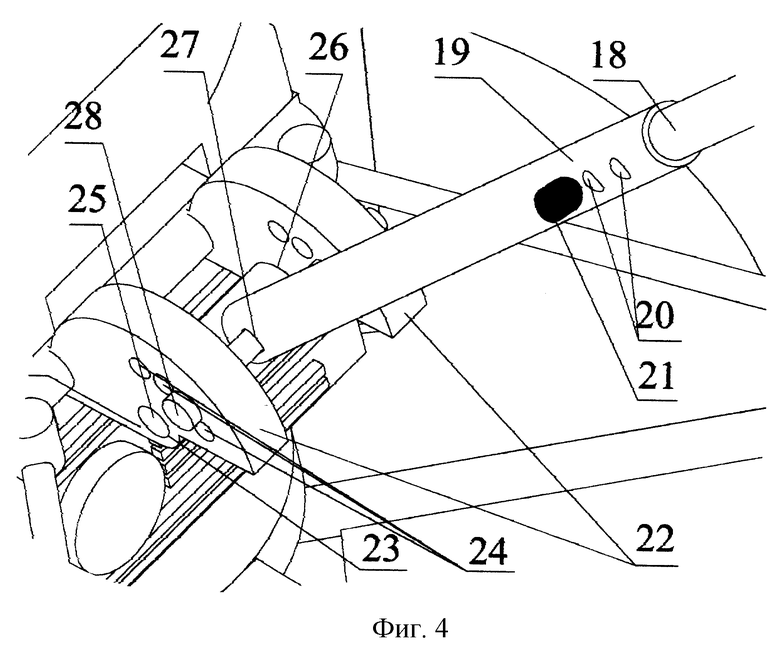
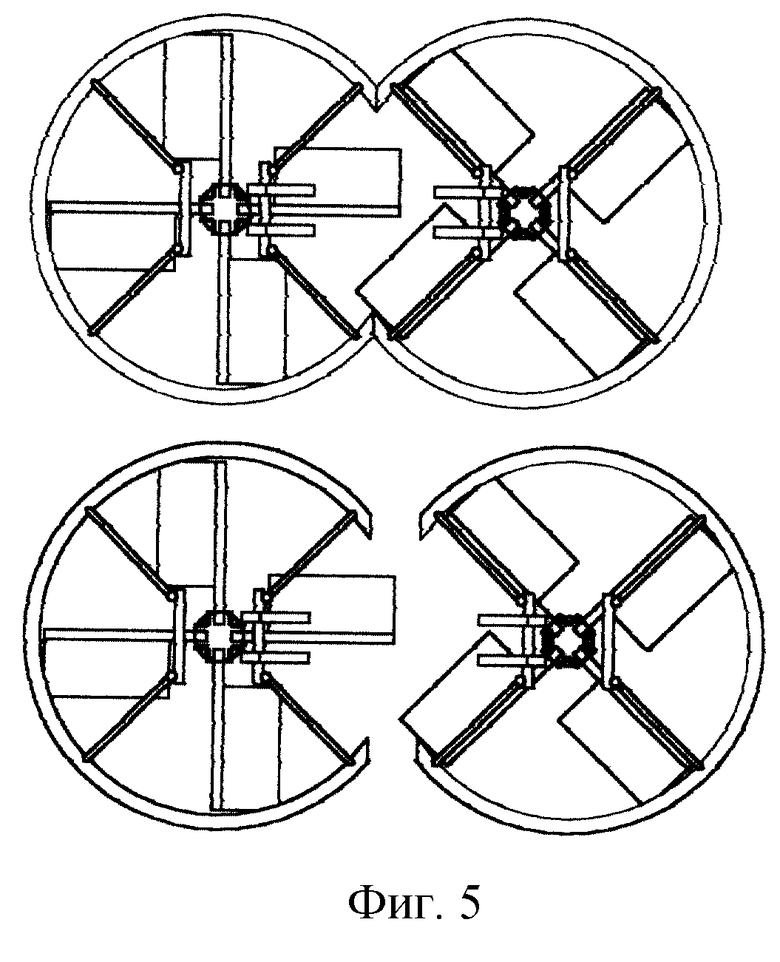
Изобретение поясняется следующими чертежами, где на фиг.1 представлен общий вид роторной заглаживающей машины в аксонометрии, на фиг.2 - вид роторной заглаживающей машины спереди, на фиг.3 - общий вид модуля в аксонометрии, фиг. 4 - устройство для изменения угла наклона рукоятки управления к дополнительной раме в аксонометрии увеличено, на фиг.5 - схема расположения рабочих органов машины на соединяющей раме при различных расстояниях между ними, в плане.
Роторная заглаживающая машина содержит соединяющую раму 1, две дополнительных рамы 2, соединенные с рамой 1, два двигателя 3, установленных на дополнительных рамах 2, посредством передач с гибкими звеньями 4 и редукторов 5 кинематически соединенные с рабочими органами 6. К дополнительным рамам 2 прикреплены кожухи 7, предназначенные для предотвращения столкновения рабочих органов 6 с посторонними объектами. Система управления содержит две рукоятки 8 управления, каждая из которых прикреплена к соответствующей ей дополнительной раме 2 с помощью устройства 9, предназначенного для регулировки угла наклона рукоятки 8 к дополнительной раме 2. На противоположных сторонах каждой дополнительной рамы 2 выполнены соосно две цилиндрические цапфы 10, продольные оси которых перпендикулярны оси вращения рабочего органа. Соединяющая рама 1 выполнена разборной и состоит из трех отдельных элементов: верхнего 11, переднего 12 и заднего 13. На противоположных концах переднего и заднего элементов симметрично выполнен ряд отверстий 14, в которые вставлены цапфы 10. Благодаря подобному соединению дополнительных рам 2 с соединяющей рамой 1 обеспечивается возможность наклона дополнительных рам 2 вместе с установленными на них элементами друг относительно друга. Наличие нескольких отверстий 14 позволяет изменять расстояние между дополнительными рамами 2. Передний 12 и задний 13 элементы соединяющей рамы 1 соединены между собой с помощью верхнего элемента 11, который содержит решетку 15, сиденье 16 и расположенные в четырех углах сиденья 16 опорные элементы 17. Рукоятки 8 управления состоят из двух частей: верхней 18 и нижней 19. Нижняя часть 19 выполнена, полностью либо частично, полой, и наружный диаметр верхней части 18 не больше внутреннего диаметра нижней части 19 рукоятки 8. На обоих частях рукоятки 8 управления выполнены фиксаторные отверстия 20, причем фиксаторные отверстия 20 верхней 18 и нижней 19 части рукоятки 8 соединены между собой с помощью фиксаторного пальца 21. Устройство 9 для изменения угла наклона рукоятки 8 управления к дополнительной раме 2 состоит из двух пластин 22, установленных параллельно друг другу на дополнительной раме 2. На каждой из пластин 22 выполнены соосно друг другу по одному центральному 23 и нескольким фиксаторным 24 отверстиям. Нижняя часть 19 рукоятки 8 управления крепится к пластинам 22 с помощью пальца 25, который соединяет центральные отверстия 23 пластин 22 с отверстием 26, выполненным на нижней части 19 рукоятки 8 управления. Таким образом, рукоятка 8 имеет возможность поворота относительно пальца 25. Для фиксации угла наклона рукоятки 8 к дополнительной раме 2 на пластинах 22 предусмотрены фиксаторные отверстия 24, расположенные на равном расстоянии от центрального отверстия 23, а на нижней части 19 рукоятки 8 выполнено фиксаторное отверстие 27. Фиксация угла наклона осуществляется с помощью фиксатора 28, соединяющего между собой фиксаторные отверстия 27 и 24. Кожух 7 состоит из двух частей: каркаса 29 и съемной части 30. Каркас 29 крепится к дополнительной раме 2, а съемная часть 30 с помощью разъемного, например болтового, соединения крепится к каркасу 29. Система управления, кроме того, включает регулятор числа оборотов двигателя 31, рычаг управления сцеплением 32 и устройство 33 для регулировки угла наклона лопастей к горизонтальной плоскости. Регулятор 31 и рычаг 32 выведены на блок управления 34, расположенный рядом с сиденьем 16. Устройство 33 регулировки угла наклона лопастей к горизонтальной плоскости может быть установлено как на дополнительной раме 2, так и на рукоятке 8 управления. Кроме того, для синхронизации скорости вращения рабочих органов 6 между собой на машине предусмотрен синхронизатор, состоящий из двух валов 35, двух карданных шарниров 36 и соединяющего вала 37. Каждый из валов 35 одним своим концом соединен с входным валом соответствующего ему редуктора 5, а другим с помощью карданного шарнира 36 с соединяющим валом 37. Вал 37 соединен с обоими карданными шарнирами 36 с помощью шлицевого соединения.
Устройство работает следующим образом. Если в качестве рабочего органа 2 используется лопастной, то съемная часть 30 кожуха 7 отсоединяется от каркаса 29. Рукоятка 8 управления установлена с помощью устройства 9 в вертикальное положение и зафиксирована фиксатором 28. Расстояние между дополнительными рамами 2, а соответственно, и между рабочими органами 6 может быть отрегулировано путем соединения цапф 10 с различными парами отверстий 14, выполненных на переднем 12 и заднем 13 элементах соединяющей рамы 1. При использовании лопастного рабочего органа благодаря отсутствию съемных частей 30 возможна установка дополнительных рам 2 на расстоянии меньшем, чем максимальный диаметр рабочего органа 6, и таким образом лопасти одною рабочею органа 6 будут находиться в промежутках между лопастями другого рабочего органа 6. Благодаря подобной схеме установки улучшается качество обработки полосы между рабочими органами 6. Шлицевое соединение соединяющего вала 37 и карданных шарниров 36 позволяет изменять расстояние между дополнительными рамами, не нарушая при этом работоспособность синхронизатора. Наличие карданных шарниров 36 обеспечивает возможность наклона дополнительных рам 2 друг относительно друга. Оператор садится на сидение 16 и, при этом, его ноги находятся на решетке 15. При необходимости на другую сторону решетки устанавливается пригруз (не показан) для выравнивания положения центра тяжести машины по продольной оси машины. Запуск двигателей 3 производится с помощью блока управления 34. При наборе ими необходимого числа оборотов с помощью того же блока управления 34 включается сцепление и вращение через трансмиссию ременные или цепные передачи 4 и редуктор 5 передается на рабочие органы 6. Принцип передвижения машины основан на эффекте возникновения нескомпенсированных сил трения между рабочими органами 6 и обрабатываемой поверхностью, который возникает при перераспределении реактивных давлений под рабочим органом 6. Подобный эффект может быть вызван путем изменения характера приложения нагрузки на рабочие органы 6. В конкретном случае рассматриваемой машины оператор прикладывает в центре рабочего органа 6 изгибающий момент путем наклона рукоятки 8 управления. При этом происходит перераспределение давления рабочего органа 6 на обрабатываемую поверхность и возникают силы, движущие машину в том или ином направлении, в то же время дополнительная рама 2 с установленными на ней двигателем 3, элементами трансмиссии и рабочим органом 6 поворачивается на небольшой угол вокруг продольной оси соединения цапфа 10 - отверстие 14 или вокруг перпендикулярной ей оси в зависимости от того, в какой плоскости наклонялась рукоятка 8 управления. При вращении рабочего органа, находящегося справа от оператора против часовой стрелки, а рабочего органа, расположенного слева от оператора по часовой стрелке, для получения направленного движения влево оператору необходимо отклонять правую рукоятку управления назад, а левую вперед, причем усилие на рукоятках должно быть примерно одинаковым. Соответственно для получения направленного движения вправо оператору необходимо отклонять правую рукоятку вперед, а левую назад. Движение машины вперед вызывается путем отклонения рукояток к центру машины, движение назад путем отклонения обеих рукояток в стороны от центра машины. Варьируя плоскости, в которых поворачиваются рукоятки, и угол их наклона можно изменять направление и скорость движения машины по усмотрению оператора.
При возникновении необходимости обработки малых по площади покрытий или заглаживания труднодоступных мест производят следующие приготовления. Регулятор числа оборотов двигателя 31 и рычаг управления сцеплением 32 отсоединяются от блока управления 34 и устанавливаются на обе рукоятки 8 управления. Верхний элемент 11 соединяющей рамы 1 отсоединяется от переднего 12 и заднего 13 элементов, а те, в свою очередь, отсоединяются от дополнительных рам 2. Угол наклона рукоятки 8 управления к дополнительной раме 2 регулируется с помощью устройства 9 и фиксируется фиксатором 28. Также регулируется длина рукоятки 8 управления и закрепляется фиксаторным пальцем 21. Таким образом, после отсоединения соединяющей рамы 1 остается два отдельных модуля, состоящих из дополнительной рамы 2, установленного на ней двигателя 3 и редуктора 5, соединенных между собой посредством передачи с гибким звеном 4, рабочего органа 6, соединенного с редуктором 5, кожуха 7 и системы управления, состоящей из рукоятки 8 управления, прикрепленной к дополнительной раме 2 с помощью устройства 9, регулятора числа оборотов двигателя 31 и рычага управления сцеплением 32, установленных на рукоятке 8 управления и устройства 34 регулировки угла наклона лопастей к горизонтальной плоскости. Такая конструкция представляет собой однороторную заглаживающую машину, которая работает следующим образом. Машина устанавливается на обрабатываемую поверхность, производится запуск с помощью системы управления, выбирается необходимый режим работы двигателя 3 и включается сцепление с помощью рычага 32. Рабочий орган 6 посредством передачи с гибким звеном 4 и редуктора 5 начинает вращаться. Перемещая машину с помощью рукоятки 8 управления по обрабатываемой поверхности, производится ее заглаживание.
Таким образом, данное изобретение позволяет использовать для обработки бетонных поверхностей в зависимости от обстоятельств либо высокопроизводительную самопередвигающуюся роторную заглаживающую машину, либо легкую и небольшую ручную заглаживающую машину.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГЛАЖИВАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2147514C1 |
| УСТРОЙСТВО ДЛЯ ЗАГЛАЖИВАНИЯ БЕТОННЫХ ПОВЕРХНОСТЕЙ | 2001 |
|
RU2204670C1 |
| ВАЛКОВОЕ ЗАГЛАЖИВАЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2208111C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ АРМАТУРЫ | 1998 |
|
RU2130365C1 |
| СИДЕНЬЕ ОПЕРАТОРА СТРОИТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2210510C1 |
| ЗАГЛАЖИВАЮЩАЯ МАШИНА | 1992 |
|
RU2037616C1 |
| ПОСТ УПРАВЛЕНИЯ ОПЕРАТОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2137625C1 |
| КАНАЛИЗАЦИОННЫЙ ДЮКЕР | 1995 |
|
RU2101425C1 |
| УСТРОЙСТВО ДЛЯ РАЗОГРЕВА СМЕСИ | 1991 |
|
RU2070262C1 |
| КАНАЛИЗАЦИОННЫЙ ДЮКЕР | 1995 |
|
RU2107782C1 |
Изобретение относится к области строительных и дорожных машин и предназначено для обработки незатвердевших бетонных поверхностей, в частности для обработки полов, дорожек, стоянок автотранспорта и подобных им покрытий. Техническим результатом является повышение эффективности машины за счет расширения области ее возможного применения и упрощение конструкции. Роторная заглаживающая машина содержит соединяющую раму, две дополнительных рамы, соединенные с рамой, два двигателя, установленных на дополнительных рамах, посредством передач с гибкими звеньями и редукторов, кинематически соединенных с рабочими органами. К дополнительным рамам прикреплены кожухи. Система управления содержит две рукоятки управления, каждая из которых прикреплена к соответствующей ей дополнительной раме с помощью устройства, предназначенного для регулировки угла наклона рукоятки к дополнительной раме. На противоположных сторонах каждой дополнительной рамы выполнены соосно две цилиндрические цапфы, продольные оси которых перпендикулярны оси вращения рабочего органа. Соединяющая рама выполнена разборной и состоит из трех отдельных элементов: верхнего, переднего и заднего. 5 ил.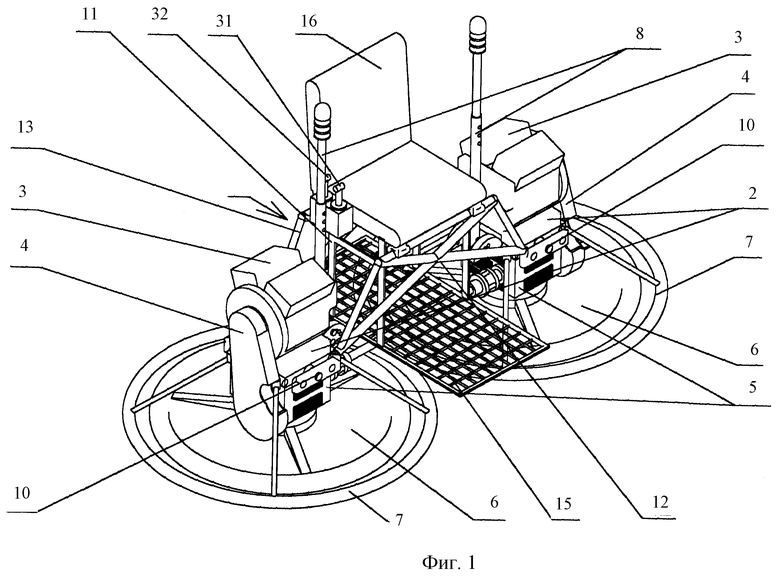
Роторная заглаживающая машина, включающая соединяющую раму, на которой установлены привод, включающий два двигателя, приводящих во вращение два ротора с вертикальными осями вращения, установленные на дополнительных рамах, прикрепленных к соединяющей раме, систему управления с двумя рукоятками, ограждающий кожух и сиденье для оператора, отличающаяся тем, что соединяющая рама выполнена разъемной и состоит из переднего и заднего элементов, и верхнего элемента, размещенного на них с помощью опорных узлов, система управления с рукоятками, каждая из которых выполнена разъемной, и состоит из верхней и нижней частей, причем нижняя часть рукоятки выполнена полой и ее внутренний диаметр больше либо равен наружному диаметру верхней части рукоятки, установлена на каждой дополнительной раме посредством устройства для изменения угла наклона рукояток к дополнительной раме, включающего две щеки, в каждой из которых выполнено по одному центральному отверстию и несколько фиксаторных отверстий, расположенных на одинаковом расстоянии от центрального отверстия, ось, установленную в центральных отверстиях, и проходящую через отверстие, выполненное на нижней части рукоятки управления, фиксаторный палец, установленный в фиксаторных отверстиях обоих щек и проходящий через фиксаторное отверстие в нижней части рукоятки управления, при этом кожух состоит из двух частей, каждая из которых установлена на соответствующей дополнительной раме и содержит каркас и съемный элемент, соединенный с ним, кроме того, на противоположных сторонах каждой дополнительной рамы, соосно друг другу, установлены две цапфы, и на переднем и заднем элементе, соединяющей рамы, выполнены отверстия, таким образом, что их оси лежат в горизонтальной плоскости и параллельны друг другу.
| US 5480258 А, 02.01.1996 | |||
| US 5238323 А, 24.08.1993 | |||
| US 5108220 А, 28.04.1992 | |||
| US 4629359 А, 16.12.1986 | |||
| Машина для разравнивания бетона | 1973 |
|
SU631080A3 |
| US 5102258 А, 07.04.1992. | |||

