(54) МАШИНА ДЛЯ РАЗРАВНИВАНИЯ БЕТОНА
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНАЯ ЗАГЛАЖИВАЮЩАЯ МАШИНА | 2001 |
|
RU2188756C1 |
| ВЕЛОСИПЕД ДЛЯ ЕЗДЫ В ПОЛОЖЕНИИ ПОЛУЛЕЖА | 2003 |
|
RU2239578C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| ТРЕНАЖЕР СО СТАЦИОНАРНЫМ ВЕЛОСИПЕДОМ И НАДУВНЫМ СИДЕНЬЕМ | 2010 |
|
RU2547043C2 |
| Ковшовая погрузочная машина для наклонных выработок | 1977 |
|
SU693037A1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 1995 |
|
RU2097249C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЧЕЛОВЕКО-МАШИННЫМ ВЗАИМОДЕЙСТВИЕМ, РАБОТАЮЩЕЕ В ЗАВИСИМОСТИ ОТ УГЛОВОГО ПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ | 2016 |
|
RU2694356C1 |
| Погрузочная ковшовая машина | 1940 |
|
SU60606A1 |
| Транспортное средство | 1989 |
|
SU1661047A1 |
| ВЕЛОСИПЕД С ЭРГОНОМИЧНЫМИ ПОСАДКОЙ И ПЕДАЛИРОВАНИЕМ | 2019 |
|
RU2724027C1 |
1
Изобретение относится к faшинaм для разравнивания бетона.
Известна машина для разравнивания бегона, содержащая раму, на которой установлены по крайней мере два рабочих органа, каждый из которых выполнен в виде ротора с вертикальным валом вращения, снабженного заглаживающими лопастями, средства управления роторами и привод их вращения l .
Однако такая машина не улучшает качества разравнивания.
Цель изобретения - улучшение качества разравнивания.
Достигается это тем, что валы вращения роторов выполнены с возможностью отклонения от вертикали с помощью рычажной системы, связанной со средствами управления, причем средства управления роторами изготовлены в виде ножной If едали и ручного рычага, имеющего две степени свободы в горизонтальной плоскости, а лопасти роторов установлены с
возможностью изменения угла наклона относительно плоскости роторов.
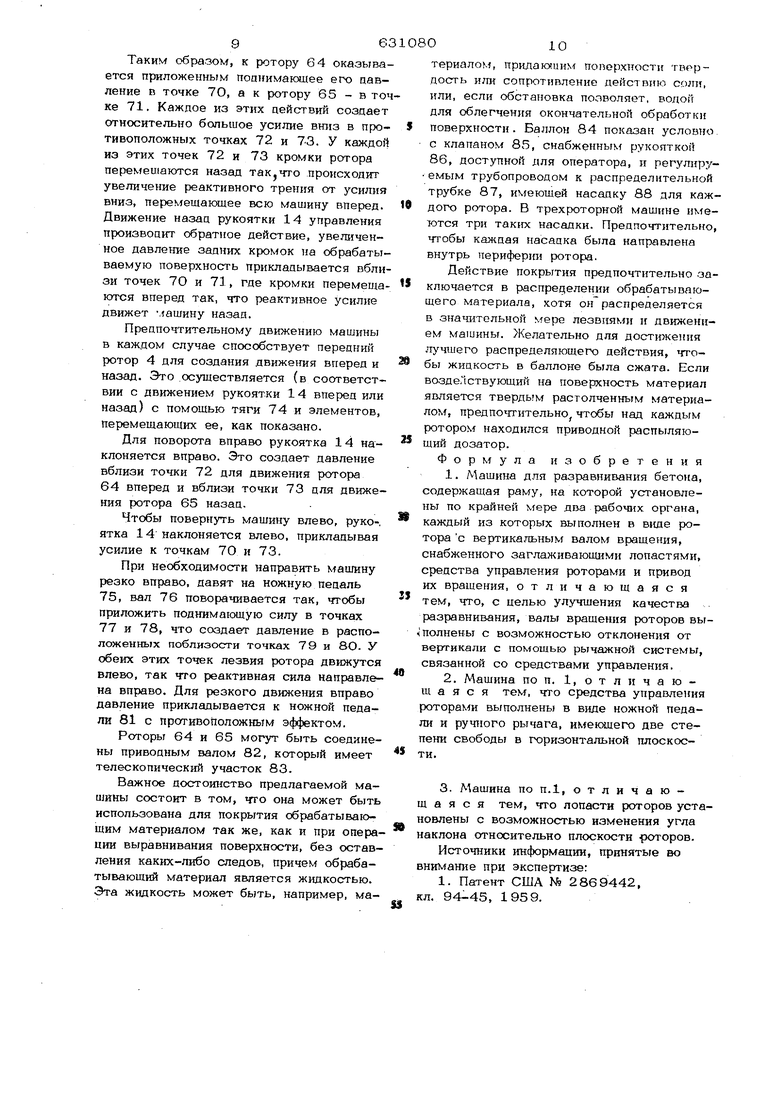
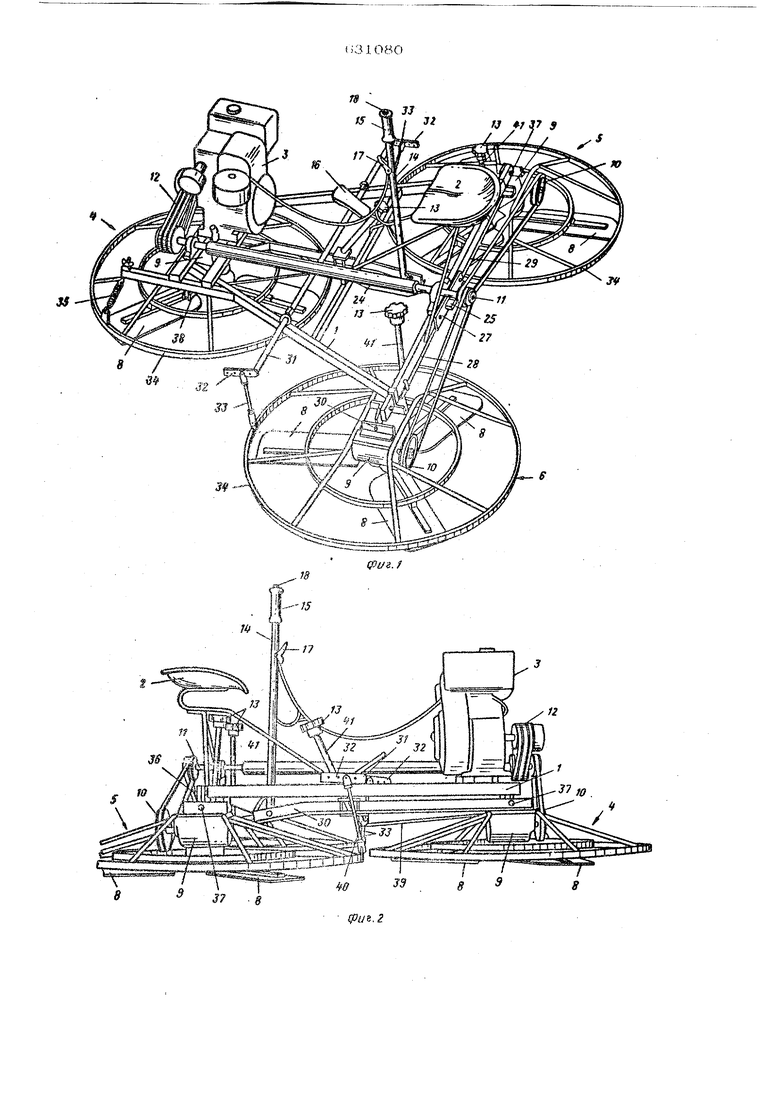
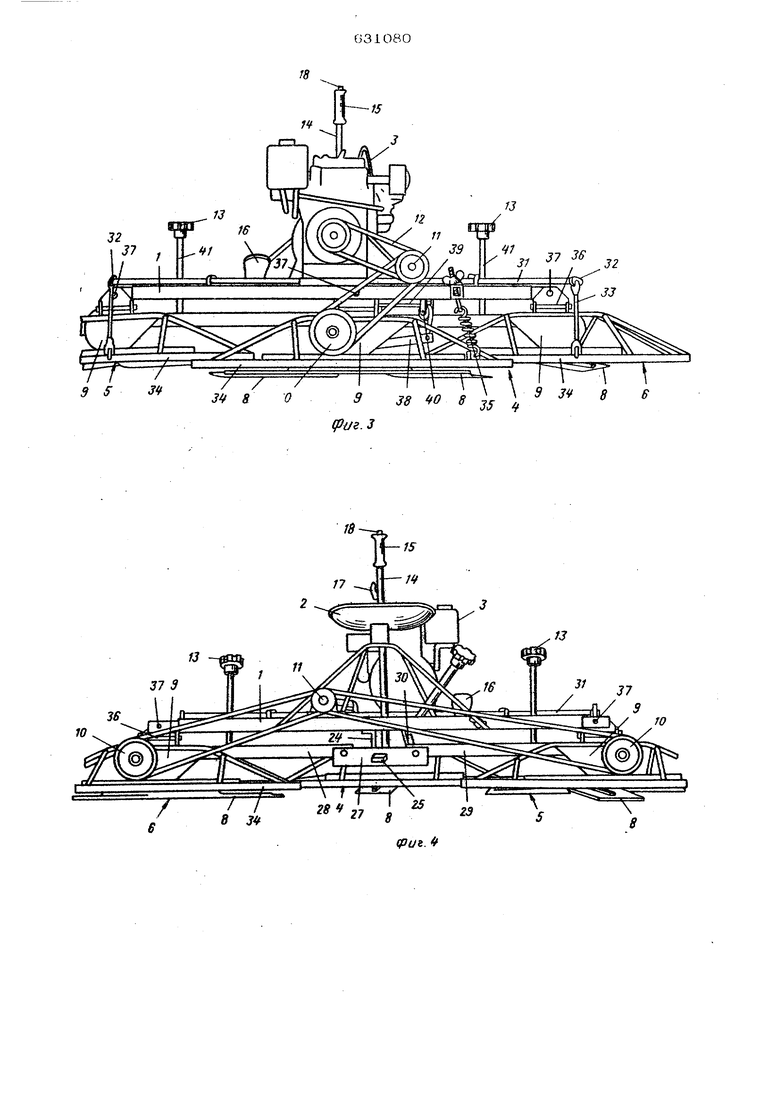
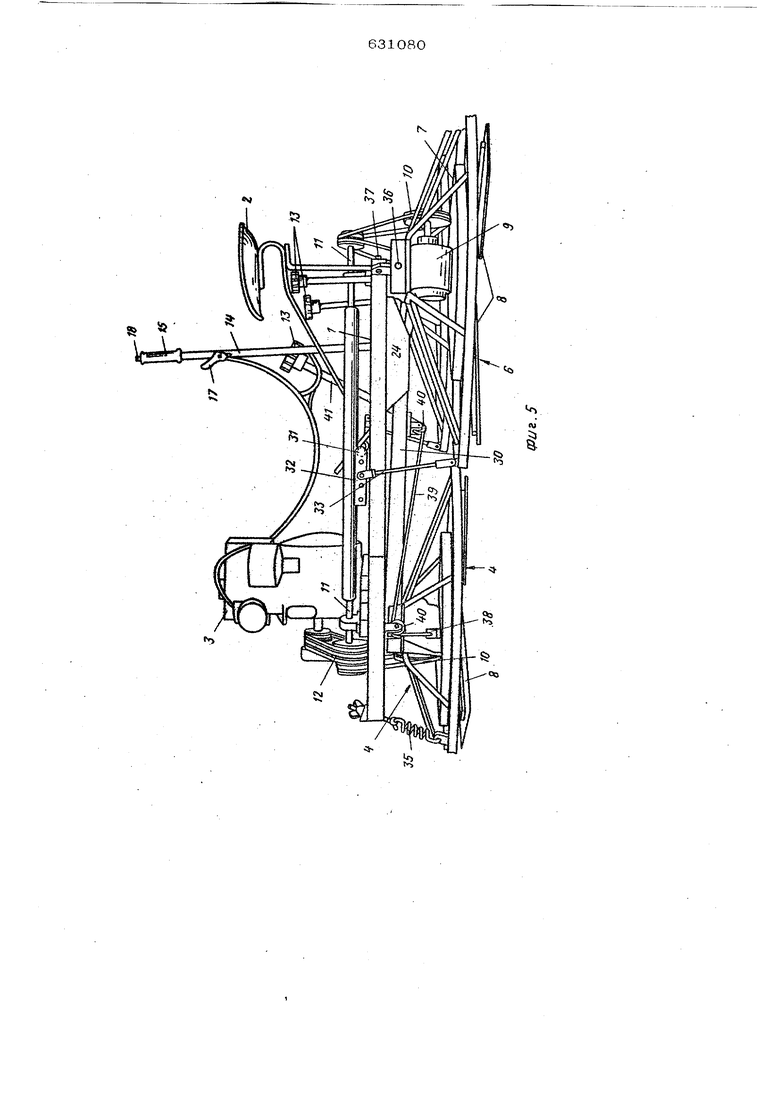
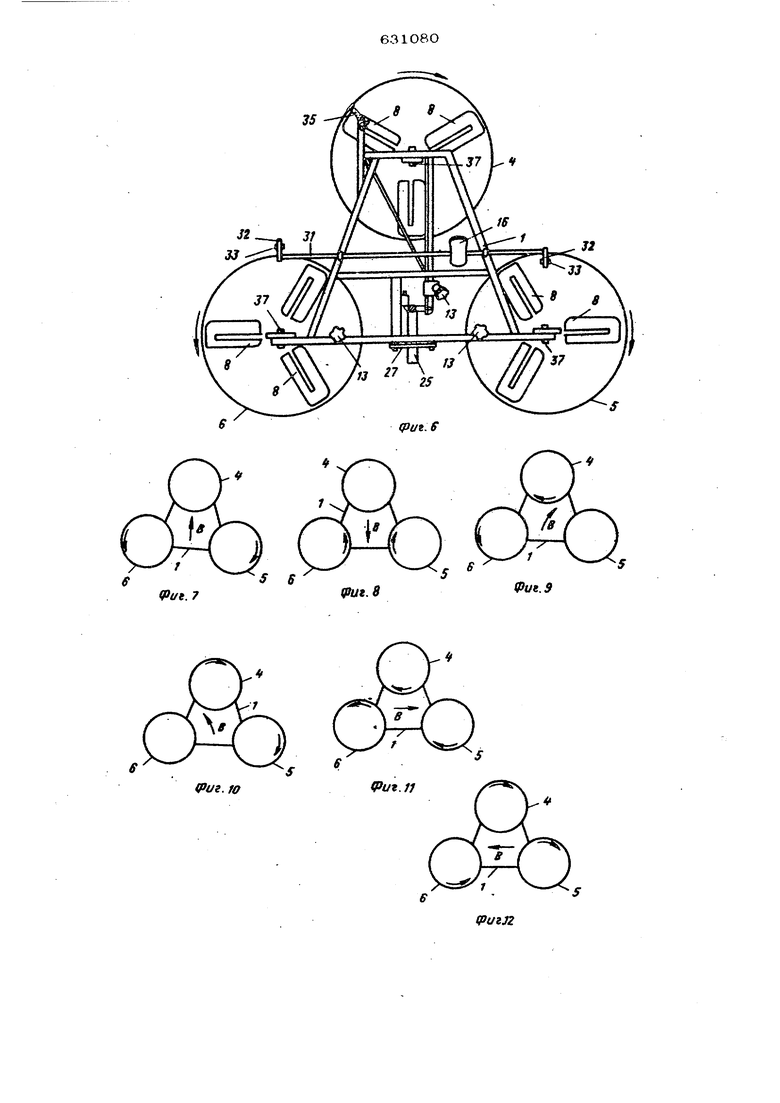
На фиг. 1 изображена предлагаемая машина, общий вид; на фиг. 2 - то же, В1Щ с правой стороны; на фиг. 3 - вид спереди; на фиг. 4 - В1щ сзади; на фиг. 5 В1Ш с левой стороны; на фиг. 6 схек«атически показана описываемая машина план; на фиг, 7-12 даны схемы показывающие
влияние приложения наклонного давления в различных точках на различных роторах; на фиг. 13 - схема монтажа рукоятки управления и ее связей с исполнительными элементами; на фиг. 14 - детали рукоятки управления и регулирующие детали цля создания наклона переднего ротора, продольное вертикальное сечение; на фиг. 15-16 схематически изображены два различных процесса наклона двух задних
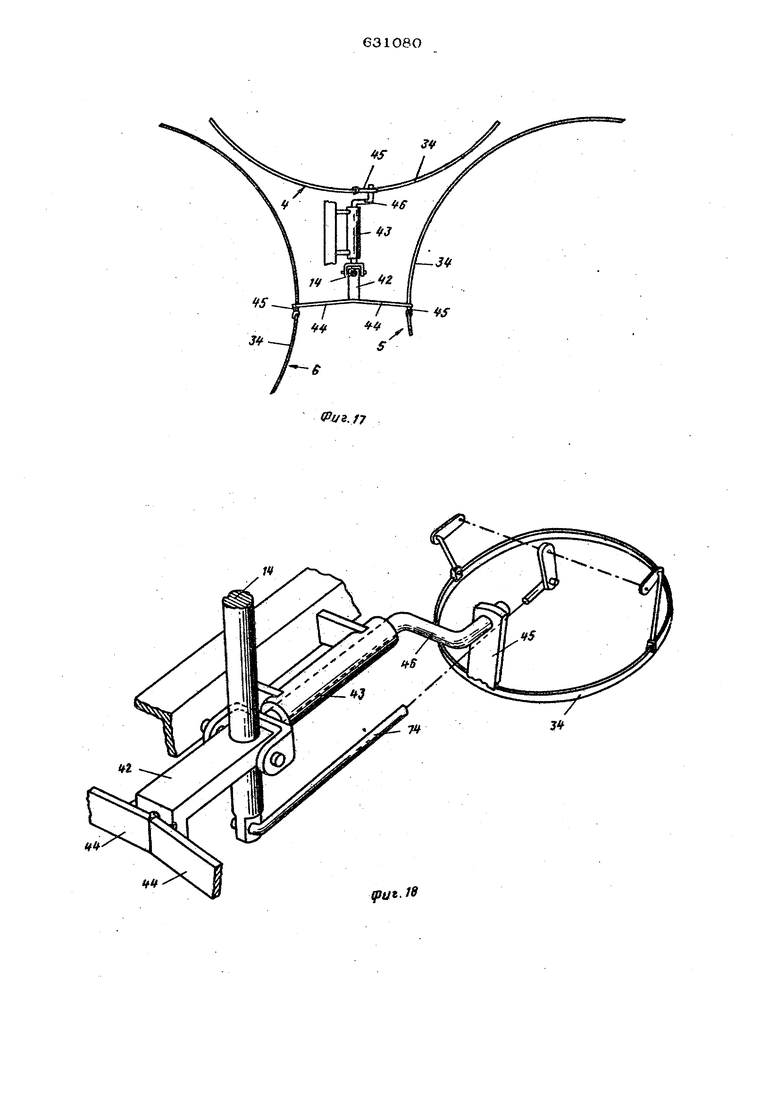
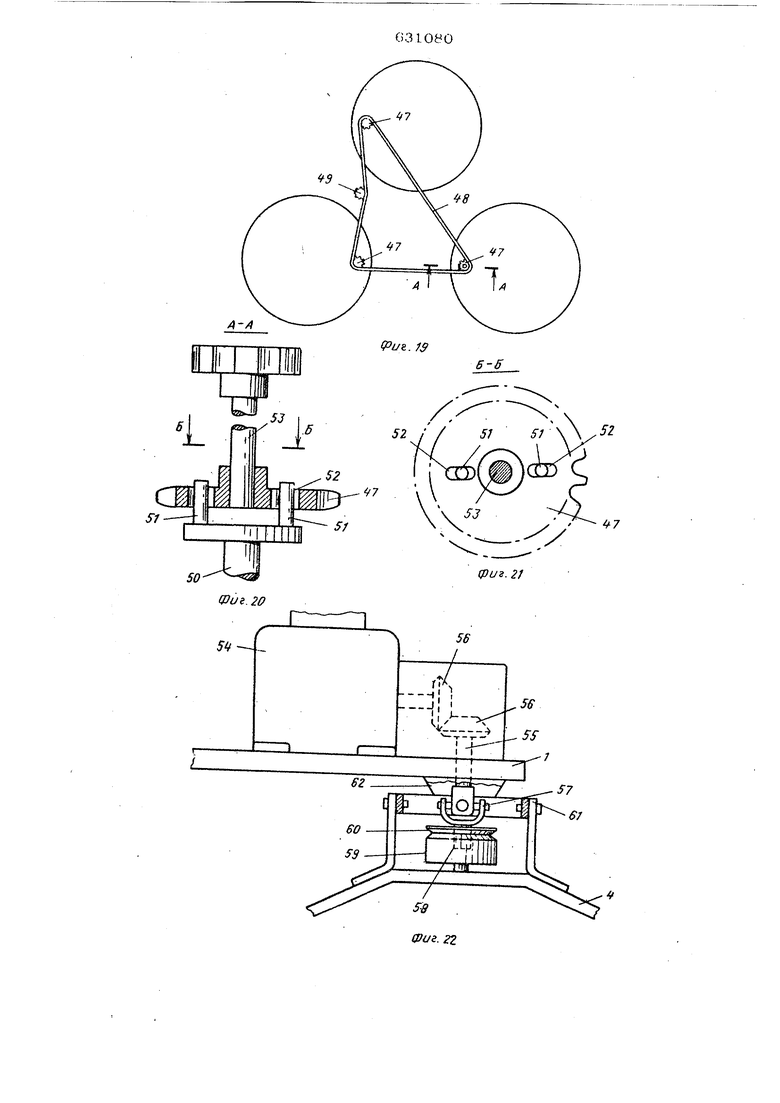
роторов; на фиг. 17 - элементы конструкции я монтажа рукоятки управления, план; на фиг. 18 - то же, вид в аксонометрии; на фиг. 1 9 схематически показаны соединения трех регулирующих устройств маит3 .63
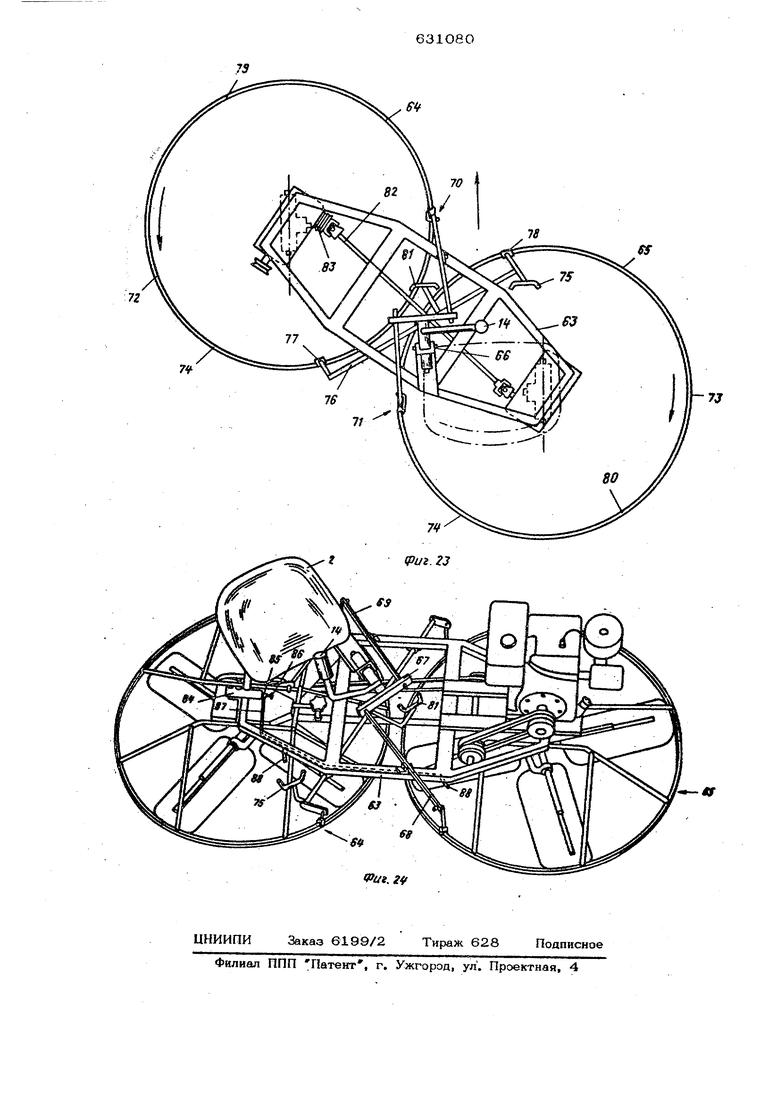
гш; на ,iiir, 20 - .з на фиг; на «|жг, 21 р&зрвз Б-Б нй фиг 20; 22 наобшжен двойной ьчесггеренчаTbit привод для зращензш poi opoa; на 4шГ. 23 - варканг йсг5ол.неккя мйшииы с двумя роторами, план; р;а |яг. 24 - то же, вна в аксонометрии.
дпя разравнил1ан:ч« бетона включает рвуголь гую раму 1, на которой укреплены сиденье 2 для оператора н двигатель 3 вну.) сгорания, Шйжзн г аждог-о из тржх углов рама 1 ноддержйвается гпадидьио-роторуым уст|К ЙСТВОМ.
Кажд,оэ из роторнь х устройств включает |зотор 7 с тремя пезвийми 8.
Все три ротора 7 тгриводятся двигате лем 3 через редуктор 9 дпя каждог-о ротора. Шккв 10 ка сдого к дуктора RpijTJO-дится ремнем от в дуще1Х) вола J. 1 . который vionyiaeT врамекпе от двигателя 3 через Ю1йНореме П{Ьге передачи 12, Oneparopi сндяццш на скненье 2. мож&г ущэаняять накпонокг ЕеЗвш1 8 от;( .для кй) ротора ручной рукояткой 13. Так fCttK авз1Гате.1ь 3 работасгт с п:остоя; -ной скоростью, оператор ташке может направггять машш1у кперкц, назад, гюкорачивать ее вправо итг. влево, действуя рукопткой 14 управления с ручкой 15 на вергпкие.
. Ь1Ъж1шя педаль J. в бьпъ нйт понена вне|:©д lutis назад от cBoet :j сйьгчяого положения дгы создактя различнстч) Перемеишния Maujmit., обьгчио в сочега- НИИ с днеджемнем рукоятки 14 утгравлоггия Рукоятка 14 у11равдеки;{ песет ва себе РУЧ1ЮЙ тормоз 17. Иа вершине рутют 15 имеегся кнопка 18 .ц.пя останова йвкглтегга Предлагаекшя маитна представляет собой тр пюиортиое средство, л бо.чее KpsTiio - транспортное С|х-;дство для j6p,a.зования яоверхнослчь В отпкмие от тгро ШЕХ транспоу- тнь х средств, око не ттмеет колес каг 1шшхся по опорной тгаверхиостп для перемещения этого тракстг. средства и дпя управяени т nivj.
Согласно 5гзобретеиию, кео6хогип..гьгй привод и управлеике транспортного сред™ dDa осуществляются накпонны - даолением, независимо прикладываемым к одному или МНОГИМ ПОВерХНОСП О 1Эбр а;7ГуЮН1иМ
роторам. Тенденция .ниБаюгцего роторе - стремиться в одну иди друг-ую .угорону под действием накгюгяной оиль, гфн ложеюгой к нему.
Наклонное давленгв увепичин.ает сил; трення. на одной стороне ротора J5 уггепь ао4
шает ;гх на другхШ его стороне, п перепад сил трения заставляет ротор двигаться, Кажцый ротор стр-емется двигаться в иапраытешш, параллельном касательной к точке паибога шего даолеи.ня иа рабочей поверхности, С наклонным давлением, приложен гым противоположно, т.е. с ная- большлм давленнем яа противоположном конце диаметра ротора, движение имеет те шет1ню осуществляться в противоположном направлении.
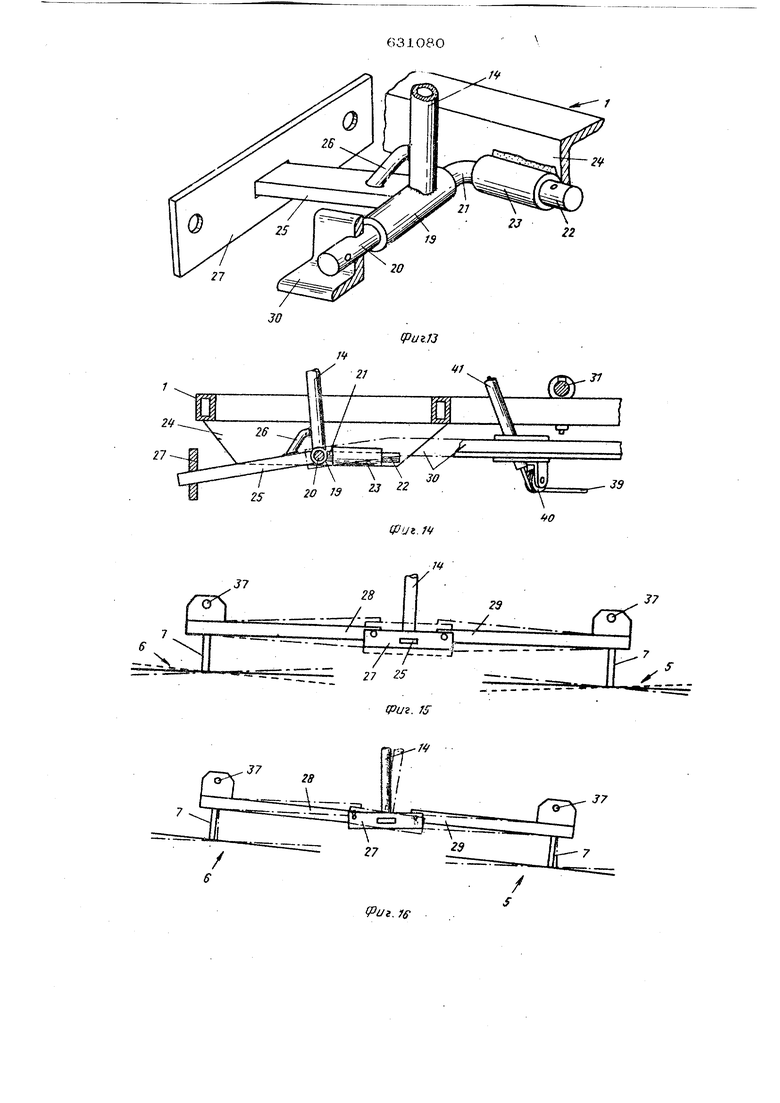
npocTbsvf управлением, согласно изоб- |)етению, достигается илфокда диапазон движений, регулирующих наклонное давление. В большгшсггпе случаев эти даапения полностью обеспе«пэа отся рукояткой 14 управления (фиг. 13), укрепленной с помощью uantfbi 19 на одном ко1ще 20 Г-об- рдэпого вала ,21, другой конец 22 кото роЕо закраплен в втулке 23. Втулка 23 иривйрена к угольнику 24, который являcvrcH козстким элементом рамы 1. Рукоятка 14 r-.fojKeT смс-щаться и назад относ5гтелыго KOinia 20 вала 21, вправо и влево откоситепыю конца 22 вала.
Движением рукоятки 14 управления вперед :ii и.азад поворачз вают орус управ;п«нкя Konco.ibso 25 вверх или вниз вокруг vc-iima 2.0 вала, закрепленного неподв 1Ж1.50. Консоль 25 жестко соедшюна с рукояткой 14 тягой 2Q, таким образом, ксяютрукцкя пред ста впяет собой угле вой рычаг.
Когда консоль 25 по.циимается, поднимается и рьгчажиая плита 27, за счет чего иоднимакутся концы двух роторных ры.;а г-ов 2 8 и 2 9, что в свою очередь соз- fitiOT давление iia правую сторону ротора 5 Г; на певую сторону pc/ropia 6. Это услоEJfe поз-газаио стрелками на фиг. 7-12 fia 1гзобра;«о11.ии роторов 5 и 6. НаправлеТ;1;е стрелки обоз)1ачает направление вращения ftOTOpa, а положение стрелки показывает точку наивысшегодавления на рабочей поверхно.сти.
В этом примере третгие у обеих точек наивысшего давления стремится переместить машину вперед, и .цвижение обозначено иапровлением стрелки В в центр, 1. На. .аруг- :х рисут1ках стрелка В направлена шшче, чтобь показать цвю се{гае рак5ы. FiCJTH рукоятку 14 наклоняется нааад, опуская консоль 25 н рычалсную плиту 27, опуска отс.я концы рычагов 28 и 28. наклоняющих роторы З и 6 в противоположные стороны.
На фиг. 8 ввдно, что точки давления находятся: на внутреггаих кромках двух торов 5 к (3, Хотя утапрзвление врашения этих роторов остается прежним, точки давления теперь находятся на их передних двия«у1цихся частях, так чго реактивное трение стремится передгзинуть машину назад. Если рукоятка управления отклонена влево или вправо относительно конца 22, вала наклонный рычаг 30 соответственно будет опускаться или подниматься. При рукоятке управления, передвинутой влево, наклонный рычаг 30 под1шмается и стремится надавить на переднюю часть переднего ротора 4, благодаря чему обеспечивается поворот влево рамы -1 (фиг. 11). Поворот вправо и поворот влево усили вается в предпочтительном варианте изоб ретения путем приложения наклонного дав ления к наружному ротору одновременно с поворотом. Рычаг 25 является плоским рычагом, входящим в узкую плоскую прорезь в рычажной плите 27. В соответствии с этим, когца рукоятка 14 наклоняется вправо или влево, также наклоняется и рычажная плита. Наклоны рычажной плиты 27 производят движение одного из наклонных рычагов 28 и 29 вверх, а другого - вниз. На фиг. 9 показано движение вверх рычага 28, создающего давление в наруж ной точке ротора 6, которое стремится переместить ротор вперед, таким образом помогая поворотному движению, обозначенному стрелкой В. На фиг. 10 видно, что движение имеет тенденцию двигать ротор 5 вперед, тем самым помогая отклонению влево, обозначенному стрелкой В. В некоторых случаях требуется движе нте всей машины вправо или влево без ее поворота. Например, если машина уже обращена лицевой частью в положение, параллельное Г(занице площади, которая должна быть выравнена, и находится вбли зи этсй границы, движение к границе поместит машину в положение готовности производить работу вдоль нее. Согласно изобретению, это движение обеспечивается педалью 16 или пействием педали вместе с наклоном вбок рукоя ки 14. Педаль 16 приводит в действие вал 31, имеющий на каждом коше рычаг 32 жестко связанный с валом. Оба рычага присоединены тягами 33 к передней части колец 34, которые являются частью роторного устройства. Один из рь чагов 32 направлен назад, в то время как дру той - вперед. Нажатне пятки тюдали 16 поворачивает вал 31 в направлении, чтобы под}1ять передний конец р зтора 6, а нажатие иоскп по.дали 16 оцуска ет иередиш конец ротора 6. Действие на ротор 5 1грямо противоположно. На фиг. 11 показано действие наклона рукоятки 14 вправо и надавливашя на носок педали 16 вниз. На всех рсзторах 4-6 положение стрелки гпкое, при котором ОШ1 вынуждены авигаться вправо, что показано стрелкой В. На фпг. 12 - обратное действие, при котором рукоятка 14 наклонена влево и пятка педали 16 надавлена вниз. В этом случае положение стрюлок на роторах 46 изображает давления, создающие движение влево, так что ptavfa 1 перемещается влево, как показано стрелкой В. Положение пружины 35 неподалеку от середины левой передней четверти выбрано исходя из того, что оно создает некоторое слабое усилие для движения вперед. Если оператор предпочитает движение назад, пружина 35 может быть расположена у середины правой передней четверти. Для различных вариантов наклонного давления каждый роторный узел соединяется с рамой 1 универсальными связями (фиг. З) и может поворачиваться около осей 36 и 37, которые расположены в Горизонтальной и вертикальной плоскостях под прямыми углами одна к другой. Рукоятка управления 14 и вытянутый назад рычаг 25 соединены настолько тесно, насколько это удобно, с осью конца вала 22, около которой происходит качание влево или впрагю рукоятки 14. Лучще всего, чтобы рычаг 25 находился по центру оси, но некоторое смещение от этого идеального положения допустимо. Если происходит некоторое ненамеренное смещение вперед или назад, оно компенсируется движением вперед или назад. Однороторная разравнивающая машина снабжена рычагом 38, который может быть оттянут вверх для регулировки наклона или поанятия носков всех гладилок на роторах. В машине каждый регулятор наклона подходит к точке, легко доступной для оператора. Так рычаг 38 ротора 4 присоединен тросом 39, прохоцящим через блок 4О к винтовому натяжному устройству 41. В случае, если имеются два задних роторных узла 5 и 6, винтовое устройство 41 непосредственно соединено с соответствуючшми рычагами наклона. Во всех примерах поворот рукоятки 13 поднимает вал 31 для увеличения наклона гладилок ссютпетствукхпего ротора. Кроме лезвий ппя бетонных работ на роторах могут быть посггавлет ы скребуише или полирующие шеткн, или элементы для чистки или шлифовки песком. Конечно, со щетками или подушками вместо лезвий устройство может быть использовано для развлекатепьных целей, обработка поверхностей является тогда необязательной, или средствами, создающими изменения авижения - для развлечеиий. В некоторых случаях можно с успехом применять данное устройство для разбрызгивания Ж1Шкости или- распыления порошка. Треугольное оформление дает высокую устойчивость с достаточно равномерным распределением общего веса между тремя роторами, так что измене ше веса оператора не причиняет никаких неприятностей. Указанные же достоинства присущи устро ствам с более чем тремя роторами, в основном (устройству с роторами вдоль двух сторон треугольника, т. е. У-образНому. На 4иг. 17 и 18 показаны некоторые улучшенные средства управления. Одно / из улучшений состоит в наличии иаутиего назад рычага 42 на оси закрепленной тру бы 43, благодаря чему наклон вбок рукоятки 14 наклоняет рычаг 42 без его подъема или опуска шя. Рычап 44, мсест ко соеоиненные с рычагом 42, могут быть непосредственно присоединены к кольцам 34 роторов 5 и 6 с помоишю выступающих вверх тяг 45, поворотно (или жестко) связанных с соответствующими кольцами 34. Другим улучшением является то, что давлегте, которое прилагается к передней части ротора через накло гаый рычаг 30, может быть приложено к плечу кривошипа 46, что более просто и непосредствен но поднимает или опускает заднюю кромку кольца 34 для приложения наклонной силы к ротору 4. Плечо кривошипа 46 может быть присоединено к кольцу 34с помрпшю тяги 45, жестко или поворотно присоединенной к кольцу 34. Вместо того, чтобы иметь три рукоят ки 13, предпочтительно объединить устройства регушфовки наклона. Для этого каждое регулирующее устрсйство действует от звездочки 47, а три звездочки соединены цепью 48, для выбирания мертвого, хода которой служит регулируемый натяжной ролик или звездочки 4 9. Вместо цепи могут быть приме нены две цепи, каждая из которых связы впет только два регулировоч П11х вала, кажпь1й со сдвоенной овезпочкой. На 4iir. 20 и 21 даны цетали, которые могут применяться, если звездочки 47 укреплены на раме 1. В эт лт случаз каждый вал 50, регулирующий наклон, должен иметь некоторую подвижность в вертикальном направлении и поп углом по отношению к связанной с ним звездочке, 47. Такое движение быть достигнуто посредством гибкого и растягивающего соепинения. Вал 50 несет пальцы 51, которые проходят сквозь прорези 52 в звездочках 47, прорези 52 точно пригнаны к пальцам 51 поокружности так, чтобы не допустить мертвого хода. Звезцочка 47, наиболее удобная для оператора, находится на валу 53 управления, идущему вверх к кнопке, с помощью которой оператор может повернуть все три вала 50 одновременно и на одинаковый угол. Деталям привода можно предпочесть коническую зубчатую одношкивную передачу для соединения с роторами. Для этого двигатель 54 установлен на раме 1 и приводит вертикальный вал 35 через пару конических шестерен 56. С такой конструкцией желательно использовать два универсальных концентрических соединения. Универсальное соединение 57 связывает вертикальный пр геодной вал 55 с вертикальным, но имеющим возможность отклоняться на некоторый угол валом 58. Шкив 59, который приводит в вращение один из роторов, например ротор 4, выполнен с одной или несколькими У-образными канавками 60 для ремня или ремней, приводящих другие роторы. Ротор должен быть снабжен опорой, независимо от привоаного вала, который обладает некоторой возможностью вертикального перемещения, и с этой целью иктеет второе универсальное соединение 61 для присоединения ротора 4 обычного действия к угольникам 62, жестко прикрепленным к раме 1. На фиг. 23 и 24 дан двухроторный вариант предлагаемой маши11Ы, которая имд- ет вместо трех роторов модифицированную раму 63 и два ротора 64 и 65. Сиденке 2 оператора расположено на раме и обращено передней частью к диагонали Движением вперед рукоятки 14 поворачивается узел управления около оси 66, тем самым опускается стержень 67 и поворачиваются рычаги 68 и 69 около поворотных точек, связанных с рамой 63. 96 Таким образом, к ротору 64 оказывается приложенным поинимаюшее его давление в точке 70, а к ротору 65 - в точ ке 71. Каждое из этих цействий создает относительно большое усилие вниз в противоположных точках 72 и 73. У каждой из этих точек 72 и 73 кромки ротора перемешаются назад происходит увеличение реактивного трения от усилия вниз, перемещающее всю машину вперед. Движение назап рукоятки 14 управления произвоаит обратное действие, увеличенное давление задних кромок на обрабатываемую поверхность прикладывается вбли зи точек 70 и 71, где кромки перемеща ются вперед так, что реактивное усилие движет -лашину назад. Предпочтительному движению машины в каж.дом случае способствует передний ротор 4 для создания движения вперед и назад. Это осуществляется (в соответствии с движением рукоятки 14 вперед или назад) с помошью тяги 74 и элементов, перемещающих ее, как показано. Для поворота вправо рукоятка 14 наклоняется вправо. Это создает давление вблизи точки 72 для движения ротора 64 вперед и вблизи точки 73 для движения ротора 65 назад. Чтобы повернуть машину влево, руко-. ятка 14 наклоняется влево, прикладывая усилие к точкам 70 и 73. При необходимости направить машину резко вправо, давят на ножную педаль 75, вал 76 поворачивается так, чтобы приложить поднимающую силу в точках 77 и 78, что создает давление в расположенных поблизости точках 79 и 8О. У обеих этих точек лезвия ротора движутся влево, так что реактивная сила направлена вправо. Для резкого движения вправо давление прикладывается к ножной педали 81 с противоположным эффектом. Роторы 64 и 65 могут быть соединены приводным валом 82, который имеет телескопический участок 83. Важное достоинство предлагаемой машины состоит в том, что она может быть использована для покрытия обрабатывающим материалом так же, как и при опера ции выравнивания поверхности, без оставления каких-либо следов, причем обрабатывающий материал является жидкостью. Эта жидкость может быть, например, ма0териалом, придаю цнм попорхности твердость и;ш сопротивление дeйcт 5пю соли, или, если обстановка позволяет, водой для облегчения окончательной обработки поверхности. Баллон 84 показан условно с клапаном 85, снабженным рукояткой 86, доступной для оператора, и регулируемым трубопроводом к распределительной трубке 87, и геюшей насадку 88 для каждого ротора. В трехроторной мащине имеются три так1гх насадки. Предпочтительно, чтобы кажцая насацка была направлена внутрь периферии ротора. Действие покрытия предпочтительно заключается в распределении обрабатывающего материала, хотя он распределяется в значительной мере лезвиями и движением машины. Желательно для достижения лучшего распределяющего действия, чтобы жидкость в баллоне была сжата. Если ваздеЛствующий на поверхность материал является твердым растолченным материалом, предпочтительно, чтобы над каждым ротором находился приводной распыляющий дозатор. Формула изобретения 1.Машина для разравнивания бетона, содержащая раму, на которой установлены по крайней мере два рабочих органа, каждый из которых выполнен в В1ще ротора с вертикальным валом вращения, снабженного заглаживающими лопастями, средства управления роторами и привод их вращения, отличающаяся тем, что, с целью улучшения качества разравнивания, валы вращения роторов выполнены с возможностью отклонения от вертикали с помошью рычажной системы, связанной со средствами управления. 2.Машина по п. 1, о т л и ч а ю щ а я с я тем, что средства управления роторами выполнены в виде ножной педали и ручного рычага, имеюцего две степени свободы в горизонтальной плоскости. 3. Машина по п. 1, отличающая с я тем, что лопасти роторов установлены с возможностью изменения угла наклона относительно плоскости роторов. Источники информации, принятые во внимание при экспертизе: 1. Патент США N 2869442, кл. 94-45, 1959. 95
(риг.З
(pUi. 3f
01
Оэ
fPife. to
J7
22
ffiUt. /
37
2Э
(риг. fs
37
(Риг. Iff
(PjJZ.n
ipu. 18
ФШ. 22
