Изобретение относится к области машиностроения и может быть использовано в машинах, действующих в автоматическом и полуавтоматическом режимах, делительных столах, транспортерах и других механизмах.
Известен способ создания неравномерного вращательного движения ведомого звена с остановками, реализованный в правильном четырехпрорезном мальтийском механизме (см. в кн. Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. Справочник / Под ред. С.Н. Кочевникова. - М.: Машиностроение, 1976, с.452, рис. 7.30). Способ заключается в том, что междулучия креста профилируются по дугам окружностей, обращенным выпуклостью к оси креста, с радиусом, соответствующим радиусу стопорной шайбы, укрепленной на ведущем валу. На ведущем валу находится также цевка, заходящая при вращении в прорези. За один оборот ведомого вала крест четыре раза поворачивается на 1/4 оборота и четыре раза останавливается.
Недостатком данного способа является то, что механизм имеет малую универсальность, так как угол поворота ведомого звена за один оборот ведущего звена должен быть кратным величине
где n - целое число. Кроме того, ведомый и ведущий валы несоосны, что увеличивает габариты механизма.
Известен также зубчатый механизм с прерывистым движением ведомого звена (см. в кн. Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. Справочник / Под ред. С.П. Кожевникова / М.: Машиностроение, 1976, стр.475, 476, рис. 7.90). В данном механизме ведомое звено - колесо-сегмент с частью зубьев находится в зацеплении с обычным колесом, снабженным диском с вырезами на несколько положений, необходимых для фиксации ведомого звена в момент остановки.
Недостатком данного механизма является то, что при вступлении в работу зубьев ведущего звена возникает большая ударная нагрузка.
Известна волновая передача (см. в кн. Кожевников С.Н. Теория механизмов и машин. М.: Машиностроение, 1973, стр.318-321, рис.12.23), состоящая из гибкого элемента, находящегося в зацеплении с ведомым звеном-колесом. Гибкий элемент деформирован посредством генератора волн, состоящего из элементов для создания волн, установленных с возможностью поворота на водиле.
Недостатком данной волновой передачи является то, что она обеспечивает постоянное передаточное отношение без остановок ведомого звена, кроме того, упругие деформации гибкого элемента уменьшают его долговечность.
Известен способ изменения скорости ведомого звена посредством деформации гибкого элемента, принятый за прототип и реализованный в волновой зубчато-цепной передаче (см. патент РФ 2098697).
Способ заключается в том, что волновая зубчато-цепная передача содержит корпус, закрепленный в нем зубчатый сектор, ведущий вал, установленный на нем генератор волн в виде разнесенных относительно оси генератора роликов, ведомое звено-звездочку и гибкий элемент в виде бесконечной цепи со звеньями, имеющими пластины с зубьями для взаимодействия с зубьями сектора и ведомым звеном.
Недостатком данного способа, принятого за прототип, является низкая универсальность, так как данный способ позволяет реализовать только одно передаточное отношение и не позволяет осуществлять движение ведомого звена с остановками.
Технической задачей является устранение указанных недостатков, а именно повышение универсальности передачи, которая заключается в возможности движения ведомого звена с остановками заданной длительности, обеспечение заданного числа остановок за один оборот ведомого звена, увеличение передаточного отношения, изменение мгновенной угловой скорости ведомого звена по требуемому закону.
Поставленная техническая задача достигается тем, что в способе создания переменного вращательного движения ведомого звена передающего механизма, включающем создание на гибком элементе движущейся в тангенциальном относительно ведомого звена направлении волны посредством генератора волн, перемещение в радиальном относительно ведомого звена направлении точек гибкого элемента, отличающийся тем, что гибким элементом охватывают как ведомое звено, так и элемент для создания волн, причем только одной фиксированной точке гибкого элемента придают возможность возвратно-поступательного перемещения в радиальном относительно ведомого звена направлении, при этом выстой ведомого звена осуществляют при совмещении фиксированной точки гибкого элемента с охватываемой частью ведомого звена, а вращение его - при удалении этой точки от охватываемой части ведомого звена.
Задача может быть решена и за счет того, что изменяют длину рабочей части гибкого элемента, одновременно осуществляют натяжение гибкого элемента перемещением элемента для создания волн в радиальном направлении относительно ведомого звена, при этом изменяют угол поворота ведомого звена за один оборот генератора волн по соотношению
где Li - изменяемая длина гибкого элемента;
dд - делительный диаметр ведомого звена.
Задача решается и тем, что изменяют угол охвата ведомого звена гибким элементом, изменяя углы набегания и сбега гибкого элемента на ведомое звено перемещением в тангенциальном направлении относительно ведомого звена дополнительных элементов генератора волн, при этом соотношение времени выстоя и движения ведомого звена выбирают по формуле
где tв, t∂ - время соответственно выстоя и движения ведомого звена за один оборот генератора волн;
ϕВ - угол выстоя ведомого звена.
Задача также достигается тем, что изменяют форму движущейся волны гибкого элемента и устанавливают закономерность изменения мгновенной угловой скорости ведомого звена во время движения по соотношению
где dL(ϕ) - приращение длины гибкого элемента при повороте генератора волн на угол dϕ;
dt - приращение времени, причем при постоянной угловой скорости поворота генератора волн ϕ = ω•t;
Задача может быть решена за счет того, что закрепленной точке гибкого элемента, помимо радиального перемещения, задают тангенциальное перемещение, причем при движении закрепленной точки в тангенциальном направлении, противоположном направлению вращения генератора волн, угловую скорость ведомого звена увеличивают, а при движении этой точки в одну сторону - уменьшают.
Задача решается и тем, что движущуюся волну выполняют с N осями симметрии относительно оси ведомого звена, причем соответственно на N участках обеспечивают прилегание гибкого элемента к ведомому звену и соответственно N участков удаления точек гибкого элемента от ведомого звена, при этом за один оборот генератора волн осуществляют соответственно N раз цикл: движение - остановка ведомого звена.
Указанная выше задача может быть решена и тем, что образуют несимметричные n-кратные волны на гибком элементе, причем углы поворота ведомого звена между выстоями устанавливают пропорциональными разности неконтактирующих друг с другом соответствующих частей гибкого элемента и ведомого звена
где ψ1 и ψ2 - углы поворота ведомого звена соответственно при первой и второй половине оборота;
L1 и L2 - длины свободных частей гибкого элемента с одной и с другой стороны;
ϕ1 и ϕ2 - углы свободных (не имеющих контакта с гибким элементом) дуг окружности ведомого звена.
Задача решается и тем, что движущуюся волну задают в плоскости, смещенной в осевом направлении от плоскости расположения ведомого звена, и генерируют волну той же формы и фазы в плоскости расположения ведомого звена.
Задача может быть решена и тем, что охват гибким элементом ведомого звена уменьшают до точки, выполняя форму волны гибкого элемента, с участками, касательными ведомому звену, при этом за оборот генератора волн осуществляют мгновенную остановку ведомого звена столько раз, сколько точек касания имеет гибкий элемент с ведомым звеном.
Для осуществления вышеуказанного способа предлагается устройство для создания переменного вращательного движения ведомого звена передающего механизма, включающее генератор волн, состоящий из водила, установленного с возможностью поворота в корпусе, и элемента для создания волн, установленного на водиле с возможностью вращения, ведомое звено, гибкий элемент, охватывающий как элемент для создания волн, так и ведомое звено, механизм направления гибкого элемента, шарнирно связанный с одним из звеньев гибкого элемента, в котором согласно изобретению гибкий элемент выполнен в виде бесконечной, как минимум, двухрядной цепи, один ряд которой охватывает элемент для создания волн, выполненный в виде цепной звездочки, а другой ряд цепи зацеплен с ведомым звеном, также выполненным в виде звездочки, причем плоскости зубьев ведомого звена и элемента для создания волн смещены в осевом направлении на расстояние, равном расстоянию между рядами цепи, а одна из осей цепи закреплена на вышеупомянутом механизме направления, состоящем из рычага, шарнирно закрепленного на корпусе, при этом водило выполнено в виде эксцентрика с эксцентриситетом, равным, как минимум, половине шага цепи, а количество звеньев цепи, по крайней мере, на одно больше количества зубьев ведомого звена.
Сравнение заявленного способа создания переменного вращательного движения ведомого звена с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в увеличении универсальности. Это стало возможным за счет использования в качестве гибкого элемента в волновой передаче цепи, у которой только один шарнир закреплен относительно поворота, то есть, благодаря техническим приемам и конструкционным связям, описанными перечисленными выше признаками, что позволяет сделать вывод о соответствии критерию "изобретательский уровень".
Сущность способа поясняется чертежами, где:
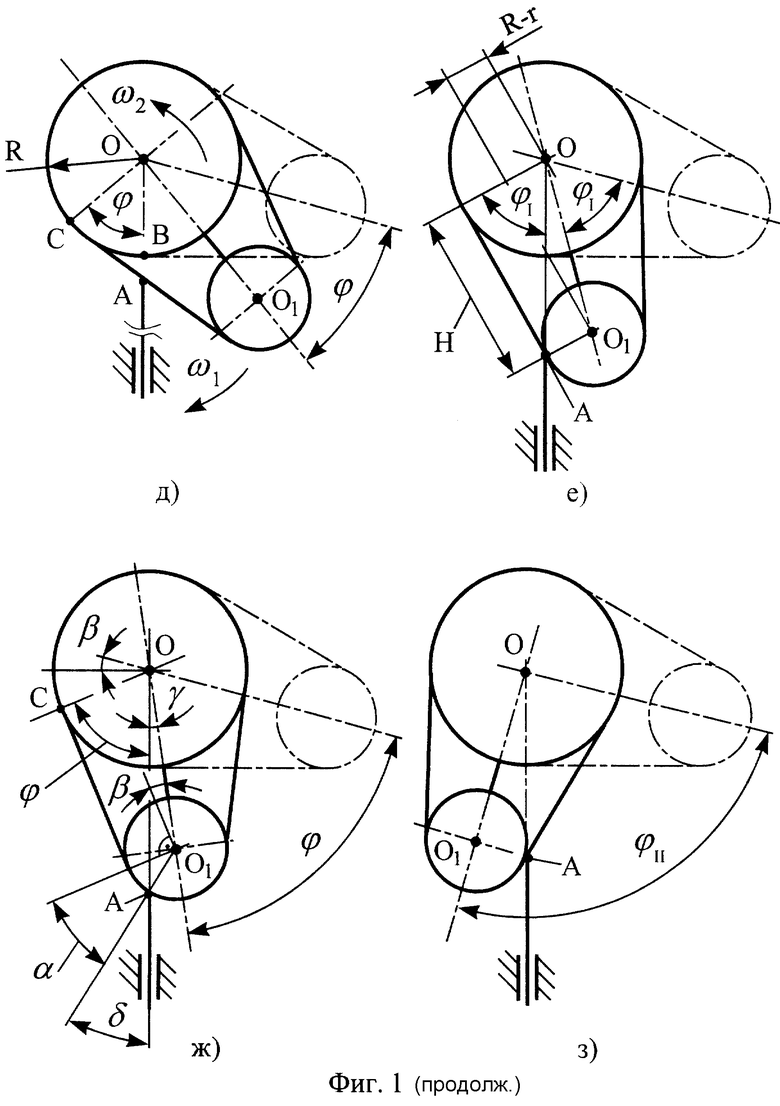
на фиг. 1 показан механизм для реализации способа создания переменного вращательного движения ведомого звена передающего механизма; на фиг.1а), б) показаны фронтальный и профильный виды механизма; на фиг.1 в), г), д), е), ж), з), и), к) механизм изображен в различных положениях для определения основных кинематических зависимостей;
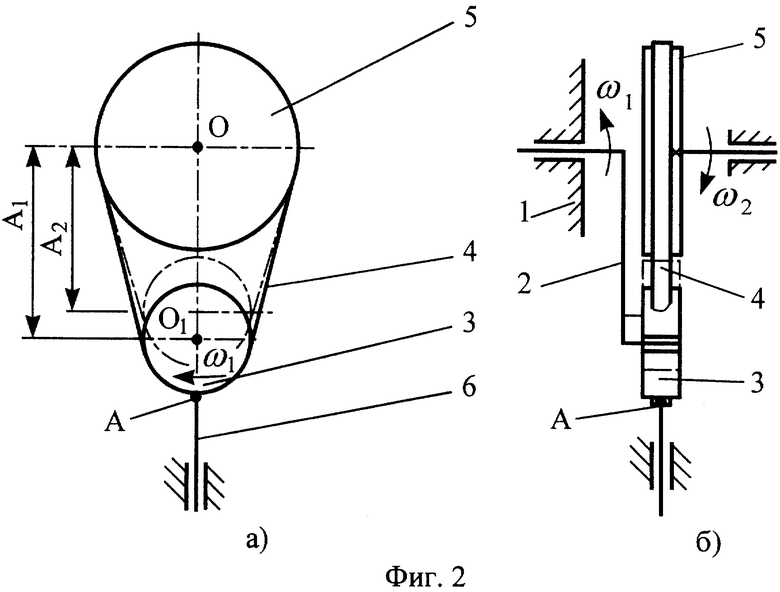
на фиг.2 а), б) показаны фронтальный и профильный виды механизма для реализации способа, при котором изменяют длину рабочей части гибкого элемента;
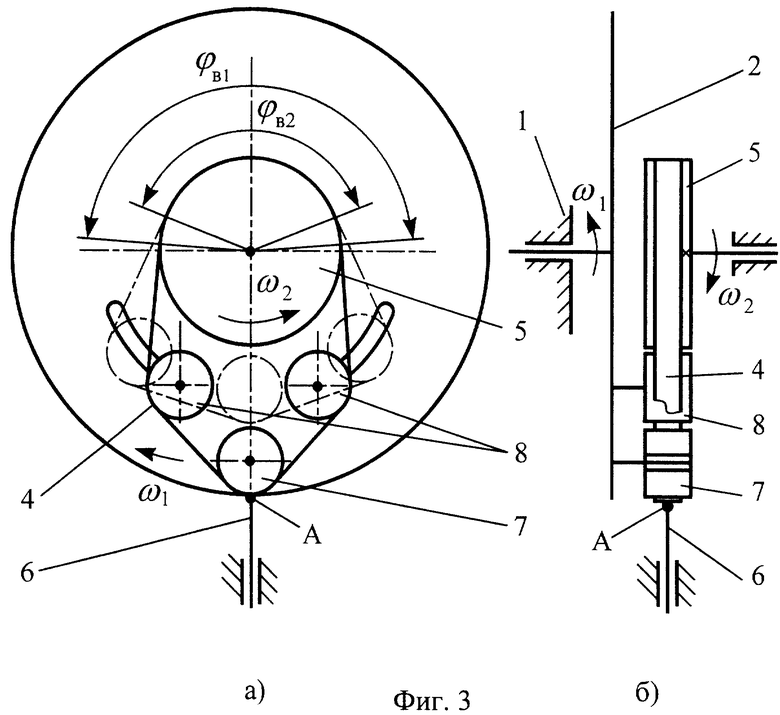
на фиг.3 а), б) изображены фронтальный и профильный виды механизма, при котором изменяют угол охвата ведомого звена посредством установки дополнительных элементов генератора волн;
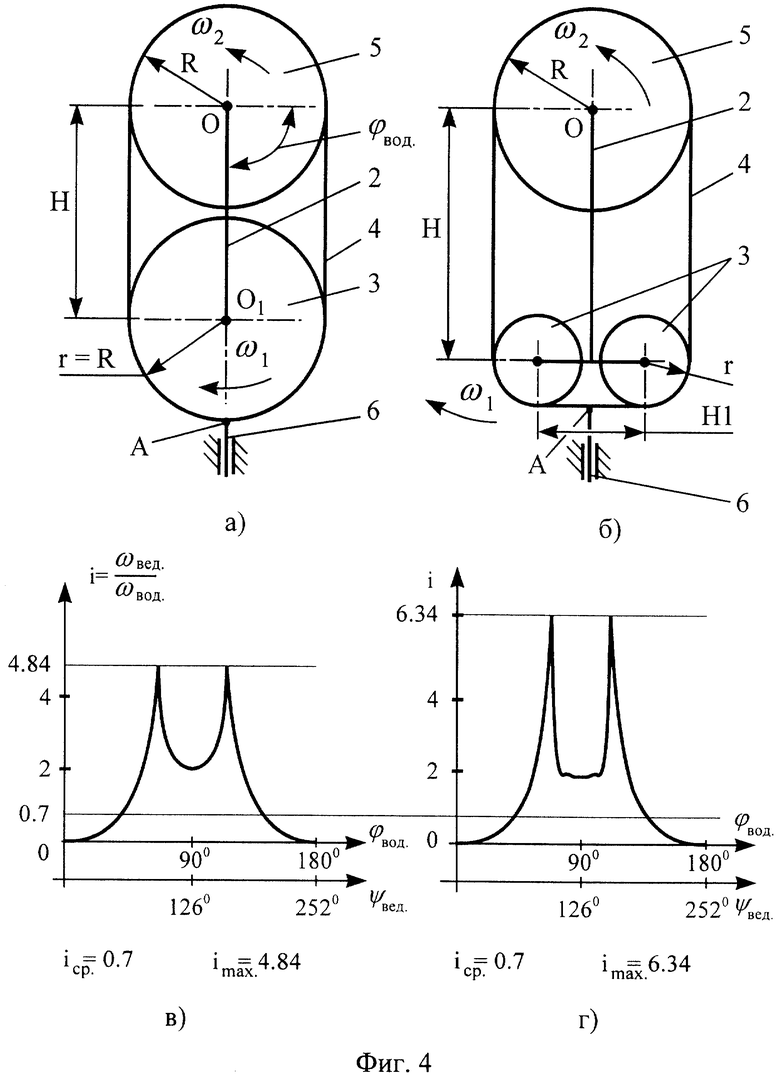
на фиг. 4 а), б) изображены фронтальные виды механизмов для реализации способа, при котором изменяют форму движущейся волны гибкого элемента; на фиг.4 в), г) показаны графики зависимости угловой скорости ведомого звена от угла поворота водила соответственно для фиг.4 а), б);
на фиг. 5 а), б) изображены фронтальный и профильный виды механизма для реализации способа, при котором закрепленной точке гибкого элемента помимо радиального перемещения задают тангенциальное;
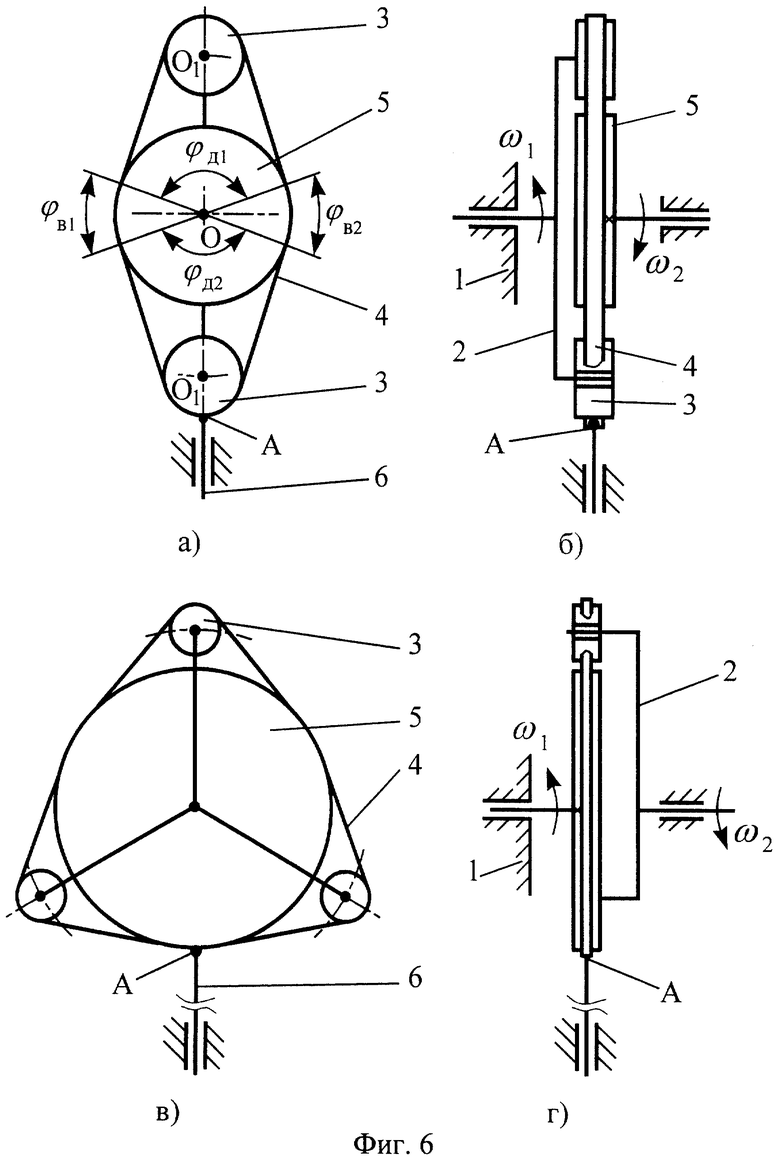
на фиг. 6 а), в) изображены фронтальные виды механизма с N остановками для реализации способа, при котором движущуюся волну выполняют соответственно с N осями симметрии относительно оси ведомого звена; на фиг.6 б), г) показаны профильные виды механизмов, изображенных соответственно на фиг.6 а), в);
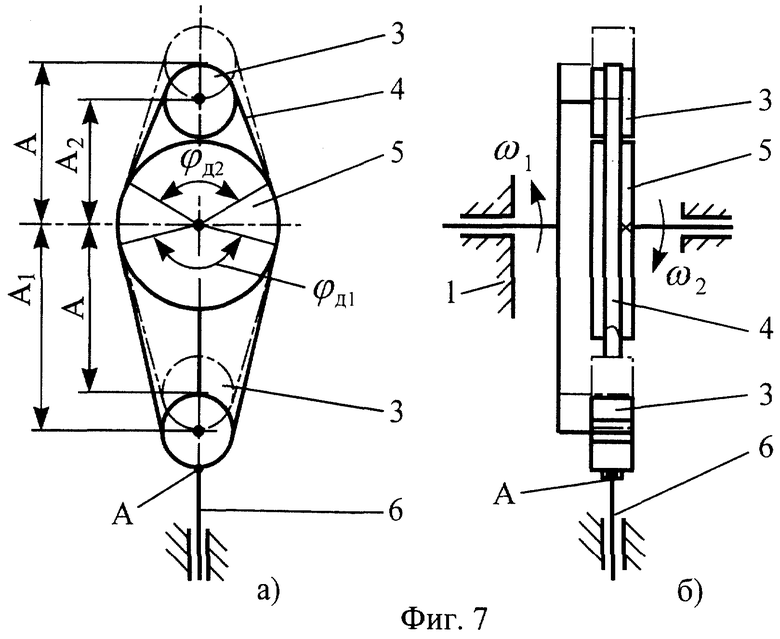
на фиг. 7 а), б) показаны фронтальный и профильный виды механизмов для реализации способа, при котором образуют несимметричные n-кратные волны на гибком элементе;
на фиг. 8 а), б) изображены фронтальный и профильный виды механизма для реализации способа, при котором движущуюся волну задают в плоскости, смещенной в осевом направлении, от плоскости расположения ведомого звена;
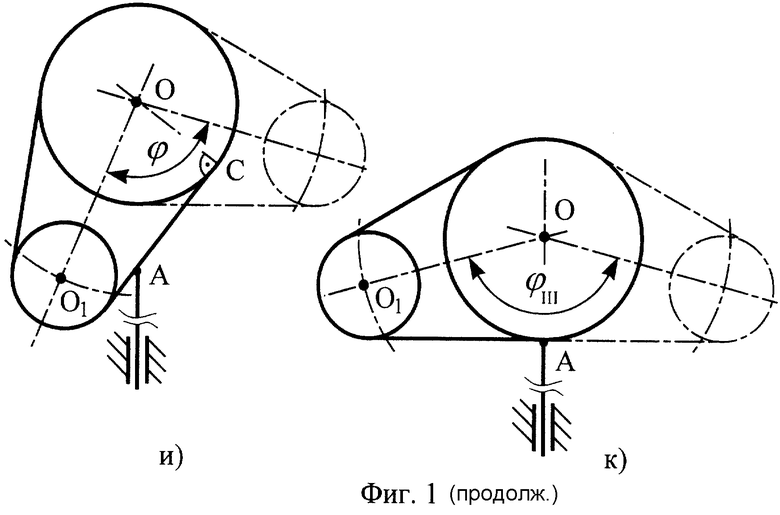
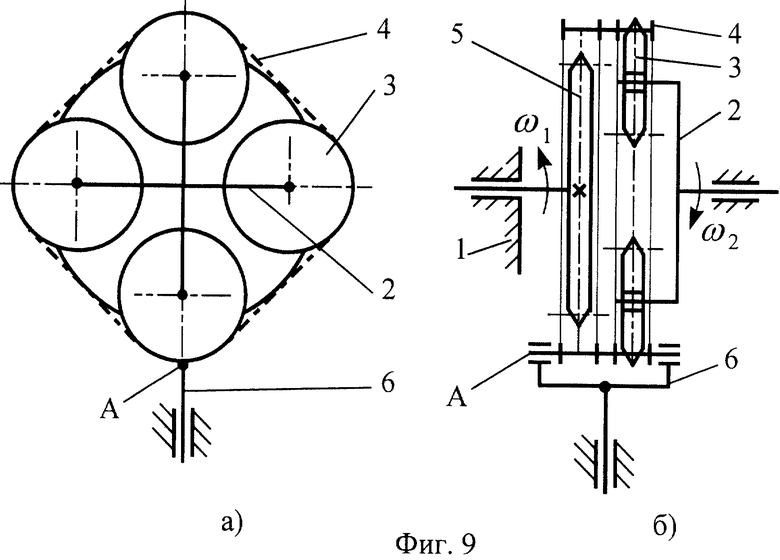
на фиг. 9 а), б) показаны фронтальный и профильный виды механизма для реализации способа, при котором охват гибким элементом ведомого звена уменьшают до точки для осуществления кратковременной остановки.
Сущность устройства поясняется чертежами, где:
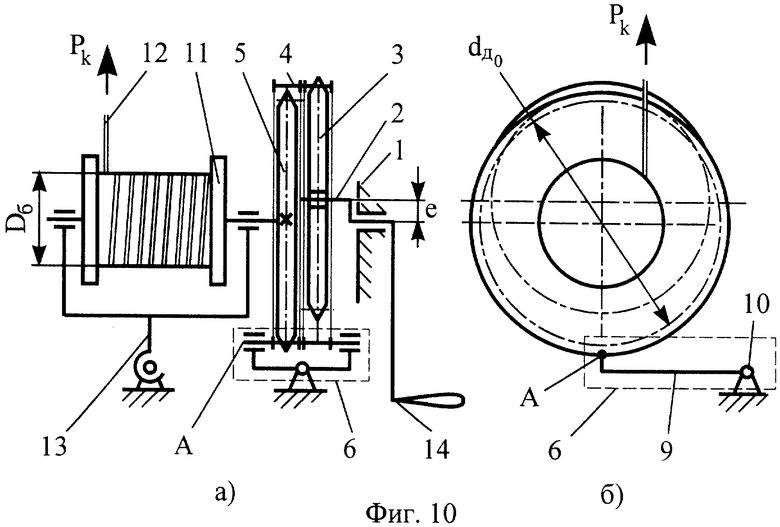
на фиг. 10 а), б) изображены фронтальный и вид сбоку устройства переменного вращательного движения ведомого звена с большим передаточным отношением, используемого в качестве лебедки.
Устройство для создания переменного вращательного движения ведомого звена содержит: установленный в корпусе 1 генератор волн, состоящий из водила 2 и элемента для создания волн 3. Гибким элементом 4 охватывают как элемент для создания волн 3, так и ведомое звено 5. Одно из звеньев гибкого элемента (точка А) закреплено на механизме направления 6.
Способ создания переменного вращательного движения ведомого звена (фиг.1 а), б), в), г), д), е), ж), з), и), к)) заключается в том, что при вращении в корпусе 1 генератора волн, состоящего из водила 2 и элемента для создания волн 3, установленного на своей оси с возможностью свободного вращения, на гибком элементе 4, охватывающем как элемент для создания волн 3, так и ведомое звено 5, возникает движущаяся круговая волна. Одну из точек гибкого элемента (точку А) закрепляют на механизме направления 6, который позволяет перемещаться этой точке только в радиальном относительно ведомого звена 5 направлении. При появлении круговой волны закрепленная точка А гибкого элемента переменно находится то на дуге контакта с ведомым звеном, то на участке, не контактирующем с этим звеном - свободный участок. Допустим, что гибкий элемент 4 контактирует с ведомым звеном 5 без проскальзывания. При повороте генератора волн по часовой стрелке от положения, изображенного на фиг. 1 в), до положения, изображенного на фиг.1 г), ведомое звено 5 не поворачивается. Это связано с тем, что закрепленная точка А гибкого элемента находится на радиусе R ведомого звена, то есть не перемещается в радиальном направлении, и в то же время не может перемещаться в тангенциальном направлении по условию крепления (из-за наличия механизма направления 6). Таким образом, точка А гибкого элемента неподвижна относительно ведомого звена, а так как гибкий элемент контактирует с ведомым звеном без проскальзывания, то и точка ведомого звена неподвижна в пространстве при повороте генератора волн на угол ϕB
ϕB = π+2•β, (1)
где R - радиус делительной окружности ведомого звена; r - радиус окружности элемента для создания волн; Н - длина прямолинейного участка гибкого элемента.
При дальнейшем повороте генератора волн (фиг.1 д), е), ж), з), и), к)) точка А гибкого элемента приобретает перемещение в радиальном направлении, допускаемом механизмом направления 6, как бы вытягивая гибкий элемент, и ведомое звено 5 поворачивается в направлении, противоположном направлению поворота генератора волн, при этом элемент для создания волн 3 свободно поворачивается на своей оси. При дальнейшем повороте генератора волн по часовой стрелке от положения, при котором начинается поворот ведомого звена (фиг.1 г)), до положения, при котором заканчивается поворот ведомого звена (фиг.1 к)), с учетом того, что гибкий элемент контактирует с ведомым звеном без проскальзывания, а длина гибкого элемента больше длины окружности ведомого звена, ведомое звено поворачивается на угол τ0. Угол поворота ведомого звена τ0 соответствует дуге окружности радиуса R, длина которой равна разности длины свободной части гибкого элемента (lCB) и длины свободной дуги окружности ведомого звена и определится по зависимости:
где lсв = L-ϕB•R; L - общая длина рабочей части гибкого элемента; ϕД - угол свободной (не имеющей контакта с гибким элементом) дуги окружности ведомого звена;
ϕД = 2•π-ϕВ. (4)
Тогда угол поворота ведомого звена за оборот генератора волн определится соотношением:
Зная угол поворота ведомого звена за оборот генератора волн, можно определить среднее передаточное отношение механизма (iCP), под которым в данном случае понимается отношение углов поворота ведомого звена - τ0 за полный цикл (высотой или движение) к полному обороту генератора волн - 2•π.
При переходе точки (А) крепления гибкого элемента на свободный участок она перемещается в радиальном направлении, за счет чего поворачивается ведомое звено. Величина угла поворота ведомого звена τi (рад) в любой момент времени определится по зависимости:
где ▿lk - длина участка гибкого элемента от точки касания с ведомым звеном до точки его закрепления (точка А); R• - длина окружности ведомого звена, с которой сматывается гибкий элемент после начала движения ведомого звена (фиг.1 г)).
- длина окружности ведомого звена, с которой сматывается гибкий элемент после начала движения ведомого звена (фиг.1 г)).
Мгновенное передаточное отношение определится соотношением:
Для определения мгновенного (текущего) угла поворота и мгновенного передаточного отношения необходимо рассматривать процесс по участкам.
На первом участке точка крепления А располагается на прямолинейном участке гибкого элемента (фиг.1 д)). Кончается первый участок при переходе к радиусному участку гибкого элемента радиуса г в месте прилегания к элементу для создания волн. Пределы первого участка определятся соотношением:
На данном участке (фиг.1 д)) гибкий элемент сходит с радиусного участка ВС ведомого звена, соответствующего длине дуги окружности R с центральным углом ϕ, а длина гибкого элемента от точки касания с ведомым звеном (С) до точки крепления А, то есть прямая АС
AC=R•tgϕ.
Тогда угол поворота ведомого звена при повороте генератора волн на угол ϕ от положения, соответствующего началу движения ведомого звена (фиг.1 г)), определяется зависимостью:
Мгновенное передаточное отношение на этом участке
На втором участке точка закрепления А располагается на радиусном участке гибкого элемента радиуса г (фиг.1 ж)). Из условия симметрии протяженность первого и третьего участков равна. Тогда протяженность второго участка
где

Откуда границы второго участка
На втором участке длина гибкого элемента ▿lk от точки касания с ведомым звеном (С) до точки крепления (А) складываются из двух частей - прямолинейного длиной Н и - радиусного
▿lk = H+α•r. (11)
Величина угла α определится из ∠OO1A (фиг.1 ж))
LOO1A = π-δ-ϕ;
Из ΔOO1A по теореме синусов:
Откуда
где А - межосевое расстояние - OO1
тогда
Величина угла β определится соотношением (2). Угол поворота ведомого звена определяется соотношением (7), после подстановки имеем
Тогда мгновенное передаточное отношение на втором участке согласно (8) определится соотношением
Следует отметить, что исходя из условия симметрии схемы, после достижения точки А крепления гибкого элемента оси симметрии, то есть точки пересечения линии, соединяющей центры ведомого звена и элемента для создания волн с гибким элементом (точка Е), величины приращений углов поворота ▿τi и мгновенных передаточных отношений ii будут зеркально симметричны соответствующим величинам, имеющим место на первой половине процесса. В связи с этим достаточно вычислить параметры поворота ведомого звена только на первой половине процесса.
Для примера рассмотрим расчет механизма, выполненного по схеме, представленной на фиг.1, имеющей следующие параметры R=r=30 мм; Н=А=2,2•R.
Для таких параметров длина гибкого элемента
L=2π•R+4,4R=(2π+4,4)•R
Величина угла поворота ведомого звена за целый оборот
ϕB = π = 180°.
То есть за первую половину оборота водила ведомое звено выстаивает, а за вторую половину оборота водила ведомое звено поворачивается на 252o.
Среднее передаточное отношение
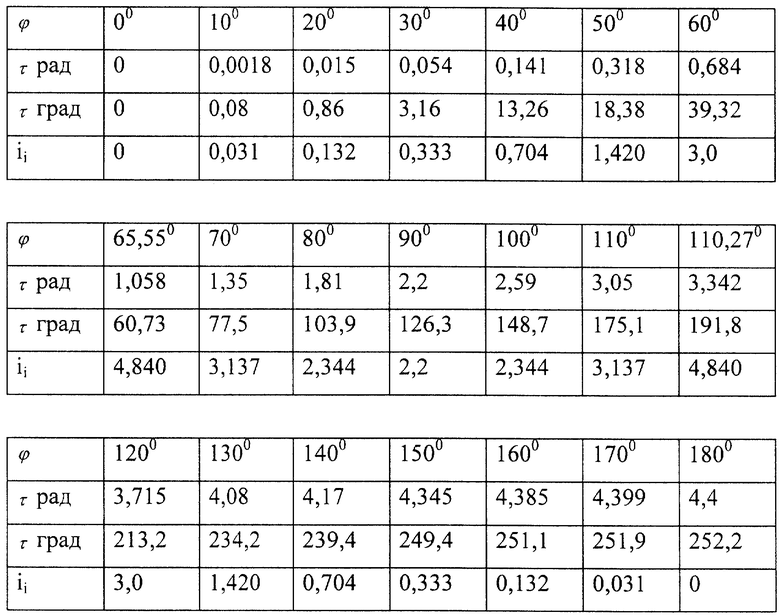
Определение мгновенного угла поворота ведомого звена и мгновенного передаточного отношения при повороте водила от положения, при котором начинается поворот ведомого звена (фиг.1 г)) (при этом положении принимается ϕ= 0) в пределах угла поворота 0≤ϕ≤63,73o определяется по соотношениям (9), (10) при повороте водила на углы в пределах 63,73o≤ϕ≤116,27o - по соотношениям (13), (14). Результаты расчетов занесены в таблицу.
Способ создания переменного вращательного движения ведомого звена, при котором изменяют длину рабочей части гибкого элемента (фиг.2 а), б)) заключается в том, что при вращении в корпусе 1 генератора волн, состоящего из водила 2 и элемента для создания волн 3, установленного на своей оси с возможностью свободного вращения, на гибком элементе 4, охватывающем как элемент для создания волн 3, так и ведомое звено 5, возникает движущаяся круговая волна. Одну из точек гибкого элемента (точка А) закрепляют на механизме направления 6, который позволяет перемещаться этой точке только в радиальном относительно ведомого звена 5 направлении. При появлении круговой волны закрепленная точка А гибкого элемента переменно находится то на дуге контакта с ведомым звеном, то на участке, не контактирующем с этим звеном - свободный участок. За время пока закрепленная точка А находится на дуге контакта с ведомым звеном, ведомое звено неподвижно, после перехода точки А на свободный участок происходит поворот ведомого звена. Гибкий элемент 4 имеет рабочий участок и свободный участок. При необходимости изменить среднее передаточное отношение передачи изменяют длину рабочего участка гибкого элемента, увеличивая или уменьшая его. Среднее передаточное отношение определяется по зависимости:
поэтому, изменяя длину рабочего участка гибкого элемента Li, можно изменить и передаточное отношение.
При изменении длины рабочего участка гибкого элемента изменяется и угол поворота ведомого звена за целый оборот водила
При изменении длины рабочего участка гибкого элемента 4 необходимо одновременно изменять и расстояние между осями ведомого звена 5 и элемента для создания волн 3 для натяжения гибкого элемента. После изменения длины рабочего участка гибкого элемента его фиксируют в этом положении.
Гибкий элемент может быть выполнен в виде цепи, охватывающей ведомое звено и элементы для создания волн, выполненные в виде цепных звездочек. В случае, когда гибкий элемент выполнен в виде цепи, между ведомым звеном и элементом для создания волн осуществляется жесткая кинематическая связь, в этом случае проскальзывания исключаются и увеличиваются передаваемые крутящие моменты. В случае использования цепи в качестве гибкого элемента по схеме, представленной на фиг.2 а), б), изменение длины рабочего участка гибкого элемента производится на величину, кратную шагу цепи.
Гибкий элемент может быть выполнен в виде ремня. Ведомое звено и элемент для создания волн в этом случае выполняются в виде ременных шкивов. По сравнению с механизмами, имеющими в качестве гибкого элемента цепь, механизм с ремнем имеет более плавный ход, уменьшается шум в зацеплении. Кроме того, при применении схемы, представленной на фиг.2 а), б), может осуществляться бесступенчатое изменение передаточного отношения механизма.
Способ создания переменного вращательного движения ведомого звена, при котором изменяют угол охвата ведомого звена посредством установки дополнительных элементов генератора волн (фиг.3 а), б)), заключается в том, что при вращении в корпусе 1 генератора волн, состоящего из водила 2 и трех элементов для создания волн: центрального 7 и двух боковых 8, на гибком элементе 4, охватывающем как элементы для создания волн 7, 8, так и ведомое звено 5, возникает движущаяся круговая волна. Элементы для создания волн 7, 8 свободно вращаются на своих осях, закрепленных на водиле 2. Одну из точек гибкого элемента (точка А) закрепляют на механизме направления 6, который позволяет перемещаться этой точке только в радиальном относительно ведомого звена направлении. Элементы для создания волн 8 при наладке могут перемещаться по круговым пазам с центром, совпадающим с центром ведомого звена, а элемент 7 перемещается в радиальном направлении. При повороте генератора волн закрепленная точка А гибкого элемента попеременно находится либо на дуге контакта с ведомым звеном 5, либо на свободном участке гибкого элемента. За время пока закрепленная точка А находится на дуге контакта с ведомым звеном 5, ведомое звено неподвижно. После перехода точки А гибкого элемента на свободный участок происходит поворот ведомого звена. При необходимости изменить соотношение времени выстоя ведомого звена и времени его движения элементы для создания волн 8 перемещают в тангенциальном направлении, изменяя угол охвата гибким элементом 4 ведомого звена 5.
Отношение угла дуги охвата ведомого звена гибким элементом к углу дуги ведомого звена, не находящимся в контакте с гибким элементом, равно отношению времени выстоя и времени движения ведомого звена за полный оборот водила. Изменяя угол охвата ведомого звена за счет перемещения элементов для создания волн 8 в тангенциальном направлении, изменяют и отношение времени выстоя и времени движения ведомого звена.
Во многих случаях необходимо изменять скорость ведомого звена по определенному закону. Эта скорость зависит от формы волны. Способ создания переменного вращательного движения ведомого звена, при котором изменяют форму движущейся волны гибкого элемента (фиг.4 а), б)), заключается в том, что при вращении в корпусе 1 генератора волн, состоящего из водила 2 и элемента для создания волн 3, установленного на своей оси с возможностью свободного вращения, на гибком элементе 4, охватывающем как элемент для создания волн 3, так и ведомое звено 5, возникает движущаяся круговая волна. Одну из точек гибкого элемента (точка А) закрепляют на механизме направления 6, который позволяет перемещаться этой точке только в радиальном относительно ведомого звена 5 направлении. При этом изменяют форму движущейся волны гибкого элемента и устанавливают закономерность изменения мгновенной угловой скорости ведомого звена во время движения по соотношению:
где dL(ϕ) - приращение длины гибкого элемента при повороте генератора волн на угол dϕ;
dt - приращение времени, причем при постоянной угловой скорости поворота генератора волн ϕ = ω•t.
При изменении формы волны величина dL(ϕ) меняется, а значит изменяется и угловая скорость ведомого звена. Покажем это на примерах.
Рассмотрим механизм, изображенный на фиг.4 а), имеющий следующие параметры: R= r= 100 мм; Н=А=2,2•R. Для таких параметров длина гибкого элемента равна L=2•π•R+4,4•R=1068 мм.
Угловая скорость определяется соотношениями (10), (14). По полученным результатам построена зависимость, показанная на фиг.4 в).
Аналогично произведем расчет для схемы, представленной на фиг.4 б), имеющий следующие параметры: R=100 мм; r=44 мм; при этом, не изменяя значения R и L, т.е. при одном и том же среднем передаточном отношении механизма, было определено значение H=251,8 мм и Н1=112 мм. По результатам аналогичных расчетов построена зависимость, показанная на фиг.4 г). Из графиков видно, что изменение скорости ведомого звена существенно зависит от формы волны.
Способ создания переменного вращательного движения ведомого звена, при котором закрепленной точке гибкого элемента помимо радиального перемещения задают тангенциальное (фиг.5 а), б)), заключается в том, что при вращении в корпусе 1 генератора волн, состоящего из водила 2 и элемента для создания волн 3, установленного на своей оси с возможностью свободного вращения, на гибком элементе 4, охватывающем как элемент для создания волн 3, так и ведомое звено 5, возникает движущаяся круговая волна. Одну из точек гибкого элемента (точка А) закрепляют на механизме направления 6, который позволяет перемещаться этой точке не только в радиальном относительно ведомого звена 5 направлении, но и в тангенциальном направлении. Механизм направления состоит из рычага 9, установленном на шарнире 10, ось которого параллельна оси ведомого звена и не совпадает с ней. Траектория движения точки А гибкого элемента имеет форму дуги окружности.
Из схемы видно, что закрепленной точке гибкого элемента, помимо радиального перемещения, задают тангенциальное, причем при движении закрепленной точки в тангенциальном направлении, противоположном направлению вращения генератора волн, угловая скорость ведомого звена увеличивается, а при движении этой точки в одну сторону - уменьшается. Дополнительное перемещение в тангенциальном направлении закрепленной точке А позволяет корректировать график изменения скорости ведомого звена, задавая его требуемым для конкретного случая.
При необходимости осуществления нескольких остановок ведомого звена за полный оборот водила используется способ, при котором движущуюся волну выполняют с N осями симметрии относительно оси ведомого звена (фиг.6 а), б), в), г)). При необходимости двукратной остановки ведомого звена за оборот водила используется двухволновый механизм (фиг.6 а), б)), для трехкратной остановки - трехволновый (фиг.6 в), г)). Способ заключается в том, что при вращении в корпусе 1 генератора волн, состоящего из водила 2, на которое устанавливаются два или три элемента 3, расположенных симметрично относительно оси ведомого звена 5. Гибкий элемент 4 охватывает как элементы для создания волн 3, так и ведомое звено 5. Одна из точек гибкого элемента (точка А) закреплена на механизме направления 6, позволяющем перемещаться точке А только в радиальном направлении относительно ведомого звена. При таких схемах имеется два или три рабочих участков ведомого звена 5 с гибким элементом 4, поэтому за один оборот водила осуществляется столько остановок ведомого звена 5, сколько волн имеет гибкий элемент. Остановки чередуются с периодами движения ведомого звена.
Рассмотрим двухволновый механизм (фиг.6 а), б)). Способ заключается в том, что на водило 2 устанавливают два элемента для создания волн 3, расположенных оппозитно относительно оси ведомого звена 5. Гибкий элемент 4 охватывает оба элемента для создания волн 3 и ведомое звено 5. Одна из точек гибкого элемента (точка А) закреплена на механизме направления 6, позволяющем перемещаться точке А только в радиальном относительно ведомого звена направлении. При такой схеме имеется два участка ведомого звена 5, на которых имеет место контакт с гибким элементом 4, а на гибком элементе имеется также два свободных участка, не контактирующих с ведомым звеном. При вращении генератора волн создается двойная движущаяся круговая волна. Закрепленная точка А гибкого элемента два раза за оборот располагается то на дуге контакта с ведомым звеном 5, то на свободном участке гибкого элемента, поэтому за оборот генератора волн дважды имеет место остановка ведомого звена 5 и движение этого звена. При симметричном расположении элементов для создания волн 3 относительно центра ведомого звена 5 длительность остановок и среднее передаточное отношение за каждые пол-оборота водила 2 будут одинаковы.
При необходимости осуществления более сложного цикла работы ведомого звена используется способ, при котором образуют несимметричные n-кратные волны на гибком элементе (фиг.7 а), б)). Способ заключается в том, что на водиле 2 устанавливают два элемента для создания волн 3, расположенных оппозитно оси ведомого звена 5, при этом элементы для создания волн 3 смещают с оси симметрии ведомого звена 5. Гибкий элемент 4 охватывает оба элемента для создания волн 3 и ведомое звено 5, при этом длины свободных участков гибкого элемента имеют разные длины. Одна из точек гибкого элемента (точка А) закреплена на механизме направления 6, позволяющем перемещаться этой точке только в радиальном относительно ведомого звена направлении. При вращении генератора волн создаются две несимметричные волны, движущиеся в тангенциальном направлении. Закрепленная точка А гибкого элемента два раза за оборот располагается либо на дуге контакта с ведомым звеном 5 (рабочий участок), либо на свободном участке гибкого элемента, поэтому за каждый оборот генератора волн ведомое звено дважды останавливается и поворачивается в направлении, противоположном направлению вращения генератора волн. Величины углов поворота ведомого звена зависят от длины свободных участков гибкого элемента, поэтому если длины свободных участков гибкого элемента неодинаковы, то неодинаковы и углы поворота ведомого звена за каждые пол-оборота водила. Отношение углов поворота ведомого звена за каждые пол-оборота водила пропорциональны длинам свободных участков гибкого элемента.
Рассмотренные выше механизмы позволяют получить достаточно небольшое передаточное число редуктора. В случае, когда необходимо получить большие передаточные отношения, применяется способ, при котором движущуюся волну задают в плоскости, смещенной в осевом направлении от плоскости расположения ведомого звена, и генерируют волну той же формы и фазы в плоскости расположения ведомого звена (фиг.8 а), б)). Способ заключается в том, что в качестве гибкого элемента 4 берут двухрядную цепь. Первый ряд двухрядной цепи охватывает элемент 3 для создания волны, второй - ведомое звено 5, выполненных в виде цепных звездочек. Водило 2 выполняют в виде эксцентрика. При одинаковом числе зубьев ведомого звена и элемента для создания волны эксцентриситет эксцентрика определяется зависимостью:
где zц - число зубьев цепи;
z0 - число зубьев ведомой звездочки;
t - шаг цепи.
Одна из осей цепи заневолена на механизме направления 6, перемещение которого осуществляется в радиальном относительно ведомой звена 5 направлении. Предложенная схема позволяет принимать количество звеньев цепи на одно больше числа зубьев ведомого звена. В этом случае передаточное число
Например, при z0=60; zц=61
Используя прием с двухрядной цепью, можно обеспечивать многократную остановку ведомого звена за один оборот водила. В некоторых случаях необходимо обеспечивать только кратковременную остановку ведомого звена через определенные промежутки времени. Для многократной кратковременной остановки ведомого звена используется способ, при котором охват гибким элементом ведомого звена уменьшают до точки (фиг.9 а), б)). В этом случае в качестве гибкого элемента 4 используется двухрядная цепь. Первый ряд двухрядной цепи охватывает элементы для создания волны 3, которые установлены с возможностью поворота вокруг своих осей на водиле 2. Второй ряд двухрядной цепи охватывает ведомое звено 5, причем оси элементов для создания волны 3 располагают таким образом, чтобы прямолинейные части цепи только касались ведомого звена 5. Одна из осей цепи соединена с механизмом направления 6, задающим перемещение оси в радиальном относительно ведомого звена направлении. Когда прямолинейные части гибкого элемента 4 только касаются ведомого звена 5, остановки ведомого звена очень кратковременны, практически мгновенны. Количество остановок ведомого звена 5 соответствует количеству волн деформации, то есть количеству элементов для создания волны. На фиг.9 а), б) показан механизм, осуществляющий четыре кратковременные остановки ведомого звена за один оборот водила.
Способ и устройство для создания переменного вращательного движения ведомого звена передающего механизма и большим передаточным числом (фиг.8 а), б)) может найти применение в редукторах тяговых и грузоподъемных устройств. Механизм для ручной лебедки (фиг.10 а), б)) состоит из корпуса 1, в котором установлен генератор волн, состоящий из водила 2, выполненного в виде эксцентрика и элемента для создания волн 3, установленного на своей оси с возможностью свободного вращения. Гибкий элемент 4 выполнен в виде двухрядной цепи, один ряд которой находится в зацеплении с ведомым звеном 5, а другой - с элементом для создания волны 3, выполненных в виде цепных звездочек. Одна из осей цепи (точка А) закреплена на механизме направления 6, выполненного в виде рычага 9, соединенного посредством шарнира 10 с корпусом 1 барабана 11, на котором намотан канат 12, закрепляется крюком 13 и соединяется валом с ведомой звездочкой 5. Водило жестко соединено с рукояткой 14. Для обеспечения большого передаточного числа механизма необходимо обеспечить минимальную разность между количеством звеньев охватывающей бесконечной цепи и количеством зубьев ведомой звездочки.
Примем, например, число зубьев ведомой звездочки 5 z0=60, а количество звеньев цепи 4 zц=61, тогда за один оборот водила 2 барабан 11 повернется на часть оборота. Передаточное отношение
За один оборот водила 2 ведомое звено 5 и барабан 11 повернутся на 1/60 часть оборота, то есть на 6o. Примем шаг двухрядной цепи по ГОСТ 13568-75 t= 9,525 мм, тогда делительные диаметры звездочек 3 и 5
Если принять диаметр барабана Dt=120 мм, то усилие на канате 12 определится соотношением
где  - допустимое усилие на цепи, берется в два раза меньше усилия разрыва;
- допустимое усилие на цепи, берется в два раза меньше усилия разрыва;
Рц=900 кг.
Тогда максимальное усилие каната
Максимальный момент на рукоятке 14 зависит от величины эксцентриситета и допустимого усилия на цепи 4
где е - эксцентриситет эксцентрика (водила).
Для рассматриваемого случая
При длине рукоятки Lp=0,4 м усилие
К достоинствам представленного механизма можно отнести то, что при его использовании не требуется храпового механизма, так как обратный поворот барабана под действием усилия каната 12 возможен только на половине оборота водила 2, когда закрепленная ось цепи находится на свободном участке цепи. Когда закрепленная на механизме направления ось цепи находится в зацеплении с ведомой звездочкой 5, самопроизвольный поворот барабана не возможен и осуществляется только под действием рукоятки 14.
Лебедка была испытана и опробована в лабораторных условиях. Испытания показали работоспособность предложенной конструкции и ее экономичность.
Ожидается ощутимый экономический эффект от внедрения устройства переменного вращательного движения ведомого звена передающего механизма, так как, например, только в современных агрегатных станках на долю делительных устройств приходится около 10% стоимости станка. В делительных устройствах на долю механизмов, имеющих движение ведомого звена с остановками (типа мальтийских), приходится до 20% стоимости изготовления устройства. Поэтому при замене известных конструкций механизмов с остановками на описанное выше устройство за счет повышения универсальности стоимость изготовления снижается на 25-30%.
Промышленная применимость, таким образом, предлагаемого способа и устройства может быть реализована в машинах, действующих в автоматическом и полуавтоматическом режимах, делительных столах, транспортерах, грузоподъемных и других машинах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2214889C1 |
| ЦЕПНАЯ ВОЛНОВАЯ ПЕРЕДАЧА | 2000 |
|
RU2183294C1 |
| ПРИВОД ВЕЛОСИПЕДА | 2000 |
|
RU2184673C2 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2196237C1 |
| СПОСОБ ОБРАЗОВАНИЯ ЗАХОДНОГО ОТВЕРСТИЯ | 2001 |
|
RU2196664C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 2004 |
|
RU2254964C1 |
| СПОСОБ ОБРАБОТКИ НЕКРУГЛЫХ ОТВЕРСТИЙ В ВИДЕ ЭКВИДИСТАНТЫ "ТРЕУГОЛЬНИКА РЕЛО" | 2003 |
|
RU2243863C1 |
| ПОРШНЕВАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ (ПЕРЕКАЧКИ) ГАЗООБРАЗНЫХ И ЖИДКИХ АГЕНТОВ (ВАРИАНТЫ) | 2002 |
|
RU2212544C1 |
| РАЗДАТОЧНАЯ КОРОБКА ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2171750C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ВРАЩАЮЩИМИСЯ ПОРШНЯМИ | 1999 |
|
RU2166654C1 |


Изобретение относится к области машиностроения и может быть использовано в машинах, действующих в автоматическом и полуавтоматическом режимах, делительных столах, транспортерах и других механизмах. Целью изобретения является повышение универсальности передачи, заключающейся в возможности движения ведомого звена с остановками заданной длительности, обеспечение заданного числа остановок за один оборот ведомого звена, увеличение передаточного отношения, изменение мгновенной угловой скорости ведомого звена по требуемому закону. Сущность изобретения заключается в том, что в способе создания переменного вращательного движения ведомого звена передающего механизма гибким элементом охватывают как ведомое звено, так и элемент для создания волн, причем одну фиксированную точку гибкого элемента закрепляют на механизме с возможностью возвратно-поступательного перемещения в радиальном относительно ведомого звена направлении, при этом выстой ведомого звена осуществляют при совмещении фиксированной точки гибкого элемента с охватываемой частью ведомого звена, а вращение его - при удалении этой точки от охватываемой части ведомого звена. Технический результат заключается в повышении универсальности передачи, расширении возможностей применения механизма в различных устройствах. 2 с. и 8 з.п.ф-лы, 10 ил., 1 табл.

где Li - изменяемая длина гибкого элемента;
dд - делительный диаметр ведомого звена.
где tв, t∂ - время соответственно выстоя и движения ведомого звена за один оборот генератора волн;
ϕв - угол выстоя ведомого звена.
где dL(ϕ) - приращение длины гибкого элемента при повороте генератора волн на угол dϕ;
dt - приращение времени, причем при постоянной угловой скорости поворота генератора волн ϕ = ω•t.
5. Способ по п. 1, отличающийся тем, что закрепленной точке гибкого элемента, помимо радиального перемещения, задают тангенциальное перемещение, причем при движении закрепленной точки в тангенциальном направлении противоположном направлению вращения генератора волн угловую скорость ведомого звена увеличивают, а при движении этой точки в одну сторону уменьшают.
где ψ1 и ψ2 - углы поворота ведомого звена соответственно при первой и второй половине оборота;
L1 и L2 - длины свободных частей гибкого элемента с одной и другой стороны;
ϕ1 и ϕ2 - углы свободных (не имеющих контакта с гибким элементом) дуг окружности ведомого звена.
| ВОЛНОВАЯ ЗУБЧАТО-ЦЕПНАЯ ПЕРЕДАЧА | 1996 |
|
RU2098697C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 0 |
|
SU266497A1 |
| Волновая несоосная передача | 1980 |
|
SU916817A1 |
| RU 95120674 A1 10.09.1996 | |||
| US 4075901 А, 28.02.1978. | |||
