Изобретение относится к обработке материалов резанием и может быть использовано при обработке некруглых валов и отверстий.
Известен способ механической обработки некруглых поверхностей (а.с. 1838047, В 23 В 1/100, 1993), включающий уравновешивание инерционных сил за счет вращения дополнительной неуравновешенной массы вокруг оси инструмента с угловой скоростью, отличной от скорости вращения инструмента или заготовки.
Недостатком способа является то, что посредством данного способа невозможно уравновесить инерционные нагрузки ударного характера при обработке профилей, у которых первая производная от функции, определяющей движение центра масс инструментального механизма, имеет разрыв, а именно ударные нагрузки в наибольшей степени влияют на точность обработки.
Наиболее близким к заявленному является способ обработки некруглых поверхностей по а.с. 178296, В 23 В 1/100, 1992. По данному способу детали и инструментальному механизму, обеспечивающему движение по заданной траектории, сообщают относительное движение резания и подачи, посредством копира изменяют первую и вторую производные от функции, определяющей траекторию движения инструмента. При необходимости мгновенного изменения направления движения инструмента осуществляют удар по линии, соответствующей направлению результирующего вектора от сложения векторов скоростей инструментального механизма в точке смены направления движения.
Недостатком данного способа является то, что после встречного удара из-за наличия моментов от сил удара в элементах инструментального механизма появляются затухающие упругие колебания, которые снижают точность обработки и увеличивают шероховатость обработанной поверхности.
Известен планетарный редуктор (см. в кн. Кожевников С.Н., Есипенко Я.И., Раскин Я. М. Механизмы. Справочник. /Под ред. С.Н. Кожевникова / М.: Машиностроение, 1976, стр.193, рис. 3.104).
Планетарный редуктор состоит из водила, заневоленного с возможностью поворота в корпусе, зубчатых колес эллиптической формы, находящихся в зацеплении, выходного вала, жестко связанного с одной из шестерен.
При вращении водила за счет зацепления эллиптических колес осуществляют изменение угловой скорости выходного вала при постоянной угловой скорости водила.
Недостатком данного редуктора являются сложность конструкции и трудоемкость изготовления эллиптических зубчатых колес.
Ближайший аналог предложенного устройства не обнаружен.
Технической задачей изобретения является устранение указанных недостатков, а именно повышение точности, уменьшение шероховатости обработки некруглых поверхностей при одновременном упрощении конструкции механизмов, обеспечивающих процесс обработки.
Поставленная задача достигается тем, что в способе обработки некруглых поверхностей, при котором детали и инструментальному механизму, обеспечивающему движение по заданной траектории, сообщают относительное движение резания и подачи, посредством копира изменяют первую и вторую производные от функции, определяющей траекторию движения инструмента, согласно изобретению в точке, у которой первая производная от функции, определяющей движение центра масс инструментального механизма, имеет разрыв, угловую скорость инструментального механизма уменьшают до нуля, а затем при удалении от этой точки увеличивают ее до скорости, допустимой режущими свойствами материала инструмента.
Поставленная техническая задача достигается также тем, что устройство для обработки некруглых поверхностей, включающее установленное в корпусе с возможностью поворота водило, находящиеся в зацеплении зубчатые колеса, ведомый вал, жестко закрепленный на одной из шестерен, согласно изобретению установленное на эксцентричной части водила колесо внутреннего зацепления закреплено на ползуне с возможностью поворота вокруг оси, установленной в расточке ползуна параллельно центральной оси колеса внутреннего зацепления, ось поворота на ползуне в радиальном направлении расположена на диаметре, равном делительному диаметру колеса внутреннего зацепления, причем ползун установлен в корпусе с возможностью радиального перемещения относительно оси поворота водила.
Сравнение заявленного способа с известными позволяет сделать вывод о достижении нового эффекта, выразившегося в том, что в момент резкого изменения направления движения центра масс инструментального механизма угловую скорость устанавливают равной нулю, что исключает ударные нагрузки на инструмент и заготовку. Это в свою очередь приводит к повышению точности и снижению шероховатости поверхности.
Сущность изобретения поясняется чертежами, где:
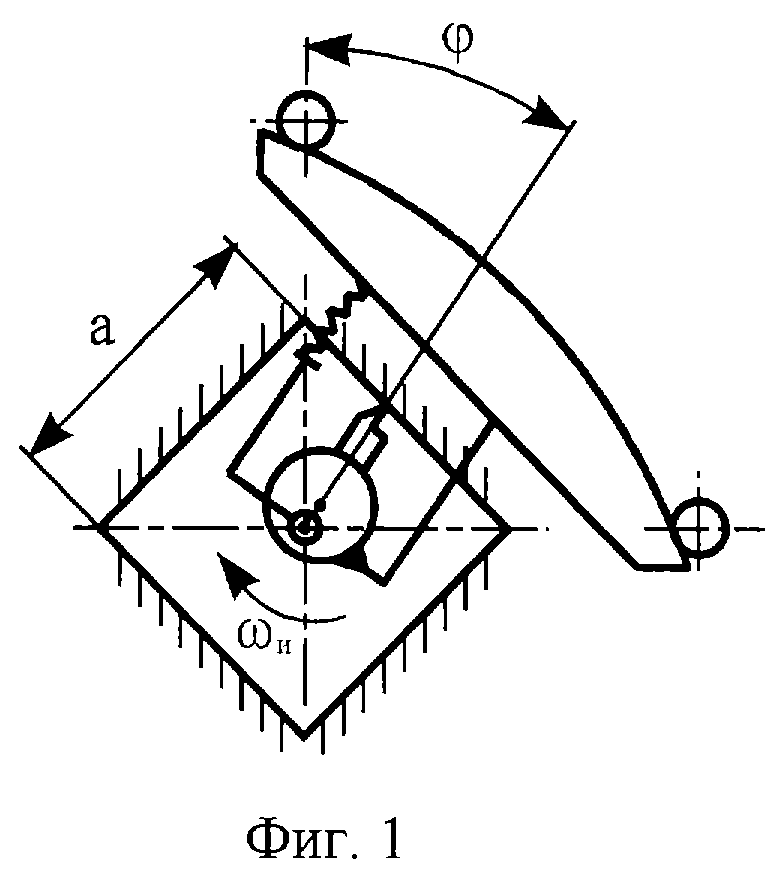
на фиг.1 изображена схема устройства для точения квадратного отверстия;
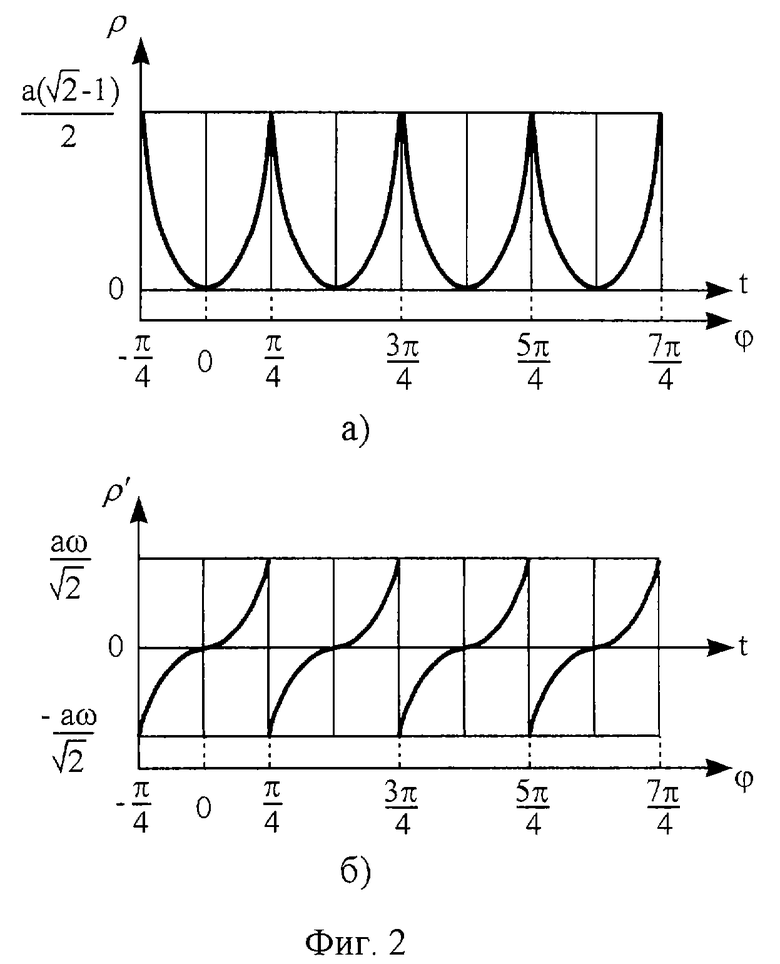
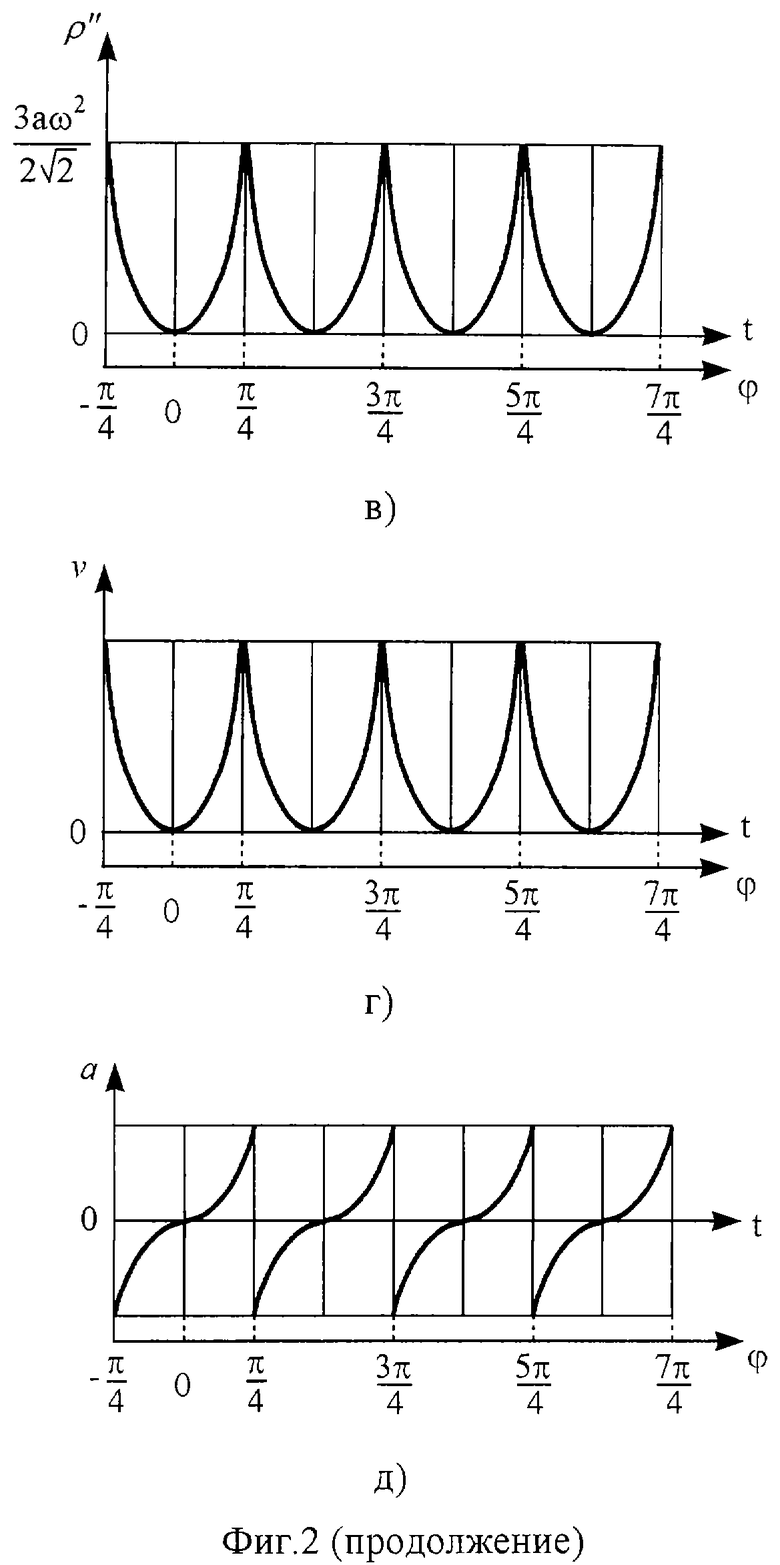
на фиг.2 представлены графики изменения радиус-вектора положения центра масс инструментального механизма (фиг.2а); первой (фиг.2б) и второй (фиг.2в) производных от этой функции при постоянной угловой скорости поворота инструмента; первой (фиг.2г) и второй (фиг.2д) производных от пути по времени;
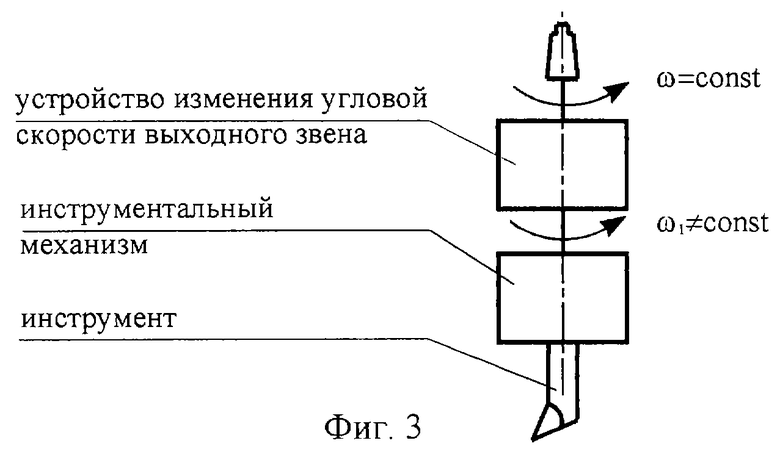
на фиг.3 изображена схема осуществления предлагаемого способа;
на фиг. 4 изображена схема устройства для обработки некруглых поверхностей;
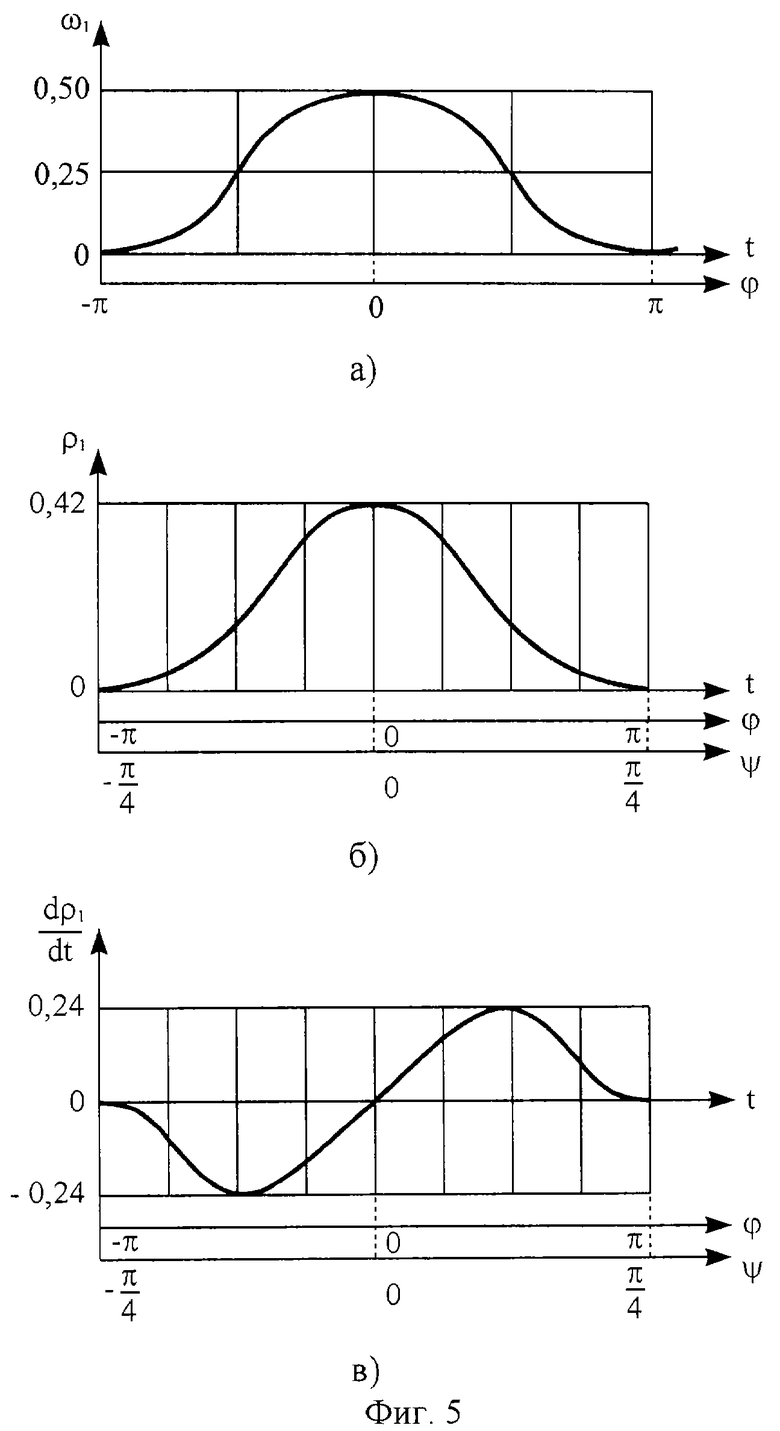
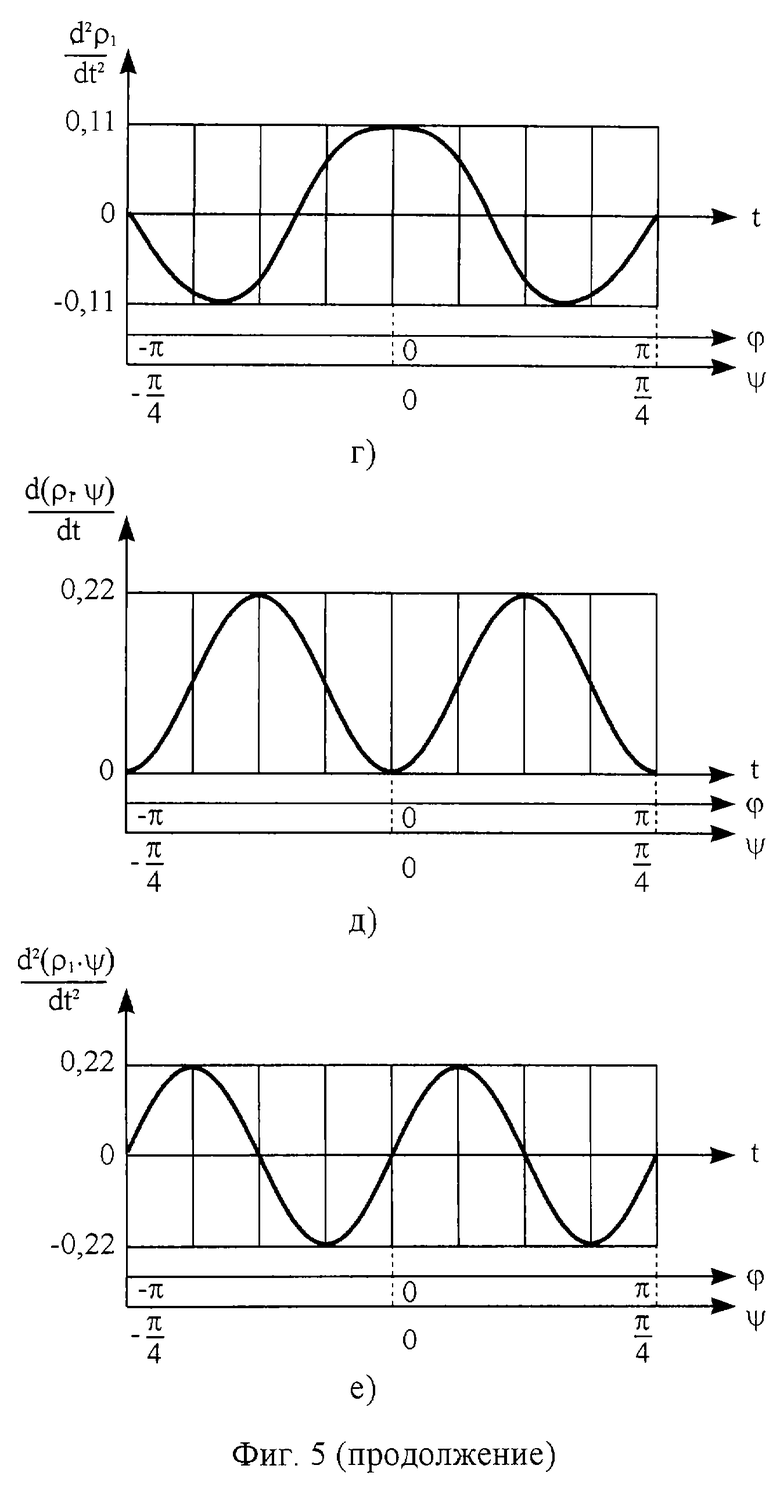
на фиг.5 представлены графики изменения угловой скорости выходного звена (фиг. 5а); изменения радиус-вектора положения центра масс инструментального механизма (фиг.5б) при обработке с непостоянными угловыми скоростями поворота инструмента; первой (фиг.5в) и второй (фиг.5г) производных от этой функции; первой (фиг.5д) и второй (фиг.5е) производных от пути по времени;
на фиг.6 показано устройство для осуществления способа обработки некруглых поверхностей.
При обработке некруглых цилиндрических поверхностей, у которых первая производная от функции, определяющей движение центра масс инструментального механизма, имеет разрывы в каких-либо точках, в этих точках инструментальный механизм испытывает нагрузки ударного характера. Например, при обработке квадратного отверстия (фиг.1) в точках пересечения граней имеет место разрыв первой производной как от радиус-вектора ρ, так и по пути ϕ (фиг.2), в этих точках инструмент испытывает большие инерционные нагрузки, которые приводят к снижению точности обработки и вибрациям элементов технологической системы. Ударные нагрузки при обработке квадрата имеют место четыре раза за полный оборот инструмента.
Уравнение движения центра масс инструмента имеет вид
где ϕ = ω•t - угол поворота инструмента, причем 
а - сторона обрабатываемого квадратного отверстия.
Первая производная от радиус-вектора по времени равна
Вторая производная от радиус-вектора по времени равна
Уравнение первой производной пути по времени имеет вид
Уравнение второй производной пути по времени имеет вид
Для исключения этих явлений в точках пересечения граней квадрата, где изменяется направление движения центра масс инструментального механизма, угловую скорость движения инструмента плавно уменьшают до нуля и затем при удалении от этой точки постепенно увеличивают до скорости, допустимой режущими свойствами материала инструмента.
Для осуществления способа в технологическую систему вводят устройство изменения угловой скорости выходного звена (фиг. 3), которое приводит в движение входной вал инструментального механизма, обеспечивающий движение инструмента по заданной траектории.
Устройство для обработки некруглых поверхностей при изменении скорости выходного звена в технологической системе содержит следующие элементы (фиг. 4). В корпусе 1 на эксцентричной части водила 2 установлено с возможностью поворота цилиндрическое зубчатое колесо внутреннего зацепления 3. С колесом 3 находится в зацеплении ведомое колесо 4, соединенное с выходным валом 5. Одна из точек (точка А) колеса 3 шарнирно закреплена на ползуне 6. Ползун 6 установлен в корпусе 1 с возможностью радиального перемещения относительно оси поворота водила. Продолжение оси поворота шарнира, соединяющего ползун 6 с колесом 3, проходит через точку на делительной окружности колеса 3.
В качестве начального положения (начало отсчета) принимается положение, когда полюс зацепления совпадает с осью шарнира (точка А) (фиг.4). При повороте водила на угол ϕ полюс зацепления перемещается в точку Р. В связи с тем, что делительные окружности колес катятся друг по другу без скольжения, дуги окружностей
∪AP = ∪PM, (1)
где М - точка делительной окружности ведомого колеса 4, находящаяся в полюсе зацепления в начальном положении устройства (ϕ = 0).
При работе устройства подобного типа при движении колеса 3 под действием эксцентрика 2 передаточное отношение определяется зависимостью
где Z1, Z2 - число зубьев шестерен соответственно 3 и 4.
Эта зависимость справедлива для определения среднего передаточного отношения. Однако в пределах одного оборота передаточное отношение изменяется из-за поворота колеса 3 вокруг точки А.
Угол поворота ведомого колеса при повороте водила на угол
ψ = τ-ϕ.
С учетом уравнения (1)
где R - радиус делительной окружности колеса 3,
r - радиус делительной окружности колеса 4.
Для определения угла необходимо выразить α = f(ϕ). Из ΔOO1А
α = ϕ-β.
По теореме косинусов
е2=(ОА)2+R2-2•(OA)•R•cos(β).
После преобразований
Тогда
Подставив в уравнение (2) выражение (5), получим
С учетом того, что угол поворота водила  угол поворота ведомого колеса равен
угол поворота ведомого колеса равен

Для определения угловой скорости необходимо уравнение (6) продифференцировать по времени. Так как угловая скорость водила постоянна, то
Уравнение углового ускорения примет вид
На фиг. 5а представлен график изменения угловой скорости ω1 выходного звена. График показывает, что ведомое колесо останавливается один раз за оборот водила. Для обеспечения остановок через каждые 90o необходимо, чтобы передаточное отношение равнялось 4:
Если принять, что Z1=50, то Z2=40.
Для определения динамических характеристик процесса обработки квадратного отверстия со стороной "а" необходимо знать уравнение радиус-вектора центра масс инструментального механизма в каждый момент времени. Предположим, что при обработке точки с минимальным радиус-вектором радиус-вектор центра масс равен нулю. Тогда текущий радиус-вектор центра масс (фиг.5б) равен
где ψ - угол поворота ведомого колеса.
Первая производная от функции (8) по времени
Вторая производная от функции (8) по времени
Первая производная от пути по времени
Вторая производная от пути по времени
На фиг. 5 показаны графики первой и второй (фиг.5в, г) производных от радиус-вектора и от пути по времени (фиг.5д, е) для обработки квадратных отверстий. Графики показывают, что при использовании предложенного устройства не наблюдается ударов при обработке.
Устройство для обработки некруглых поверхностей (фиг.6), которое устанавливают на сверлильный или расточной станок, работает следующим образом. Корпус механизма 1 крепят к пиноли станка. Водило 2 хвостовой частью установлено в коническую расточку шпинделя станка. Водило 2 заневолено в корпусе 1 посредством подшипника 7. На эксцентричную часть водила 2 посредством подшипников 8 установлено колесо внутреннего зацепления 3. С колесом 3 находится в зацеплении ведомое колесо 4, жестко соединенное с ведомым валом 5, которое крепится посредством подшипников 9 в корпусе 1. На колесе 3 устанавливают с возможностью поворота ось 10, которая расположена параллельно оси колеса и в радиальном направлении совпадает с делительной окружностью зубьев колеса 3. Другим своим концом ось 10 установлена с возможностью поворота в отверстии ползуна 6. Ползун 6 установлен с возможностью осевого перемещения в отверстии направляющей втулки 11, ось которой расположена радиально относительно оси вращения водила 2 и крепится в резьбовом отверстии корпуса 1. Выходной вал 5 оснащен конической расточкой, в которую устанавливают инструментальный механизм для обработки некруглых поверхностей.
При вращении в корпусе 1 водила 2 ось колеса внутреннего зацепления 3 совершает круговые движения с радиусом, равным эксцентриситету водила. Колесо 3 может также поворачиваться вокруг оси 10, которая в свою очередь перемещаться с ползуном 6 в радиальном направлении. При работе планетарной передачи подобного типа при движении колеса 3 под действием эксцентрика 2 происходит дополнительное качательное движение этого колеса вокруг оси 10 с частотой, равной частоте вращения эксцентрика, и за счет этого передаточное отношение не постоянно и изменяется по определенному закону за один оборот эксцентрика. Совпадение оси 10 с делительным диаметром колеса 3 обеспечивает изменение угловой скорости колеса 4 и периодический его останов. Таким образом, выходной вал 5, жестко соединенный с колесом 4, к которому крепится инструментальный механизм, совершает кратковременные остановки за каждый оборот эксцентрика. В связи с тем, что, например, при обработке квадратного отверстия среднее передаточное отношение равняется четырем, остановки выходного звена осуществляются 4 раза за его оборот.
Использование предлагаемых способа и устройства позволит исключить ударные нагрузки на режущий инструмент и за счет этого увеличить точность обработки некруглых поверхностей, у которых первая и вторая производные от времени имеют разрывы.
Изобретение может быть использовано в технологических системах, применяемых для обработки некруглых поверхностей, как внутренних, так и наружных, которые находят применение, например, при формообразовании деталей бесшпоночных моментопередающих соединений. Наибольший эффект достигается при обработке гранных цилиндрических поверхностей, у которых наблюдается разрыв первой производной от траектории движения вершины центра инструмента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПЕРЕМЕННОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ВЕДОМОГО ЗВЕНА ПЕРЕДАЮЩЕГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2189508C2 |
| СПОСОБ ОБРАБОТКИ НЕКРУГЛЫХ ОТВЕРСТИЙ В ВИДЕ ЭКВИДИСТАНТЫ "ТРЕУГОЛЬНИКА РЕЛО" | 2003 |
|
RU2243863C1 |
| СПОСОБ ОБРАЗОВАНИЯ ЗАХОДНОГО ОТВЕРСТИЯ | 2001 |
|
RU2196664C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕКРУГЛЫХ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2003 |
|
RU2245224C1 |
| ЦЕПНАЯ ВОЛНОВАЯ ПЕРЕДАЧА | 2000 |
|
RU2183294C1 |
| ЦЕНТРОВОЧНЫЙ ИНСТРУМЕНТ ДЛЯ ОБРАБОТКИ ЖЕСТКО КООРДИНИРОВАННЫХ ОТВЕРСТИЙ | 2000 |
|
RU2193951C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИСТЕМ КООРДИНИРОВАННЫХ ОТВЕРСТИЙ НА СТАНКАХ С ЧПУ | 2000 |
|
RU2171733C1 |
| ПРИВОД ВЕЛОСИПЕДА | 2000 |
|
RU2184673C2 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ ЗУБЧАТЫХ ПЕРЕДАЧ В МНОГОСТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 2004 |
|
RU2268162C1 |
| Способ обработки некруглых поверхностей и устройство для его осуществления | 1990 |
|
SU1782696A1 |

Изобретение относится к обработке материалов резанием, обработке некруглых валов и отверстий. Способ включает сообщение детали и инструментальному механизму, обеспечивающему движение по заданной траектории, относительного движения резания и подачи, изменение посредством копира первой и второй производных от функции, определяющей траекторию движения инструмента. Для повышения точности и уменьшения шероховатости обрабатываемых поверхностей с одновременным упрощением конструкции механизмов, обеспечивающих процесс обработки в точке, в которой первая производная от функции, определяющей движение центра масс инструментального механизма, имеет разрыв, инструментальный механизм перемещают с уменьшением угловой скорости до его остановки, а затем при удалении от этой точки - с увеличением угловой скорости до величины, допустимой режущими свойствами материала инструмента. Устройство содержит установленное в корпусе с возможностью поворота водило, на эксцентричной части которого установлено зубчатое колесо внутреннего зацепления, предназначенное для зацепления с зубчатым колесом, жестко соединенным с ведомым валом, и закрепленное на ползуне с возможностью поворота вокруг оси, установленной в расточке ползуна параллельно центральной оси указанного зубчатого колеса внутреннего зацепления и расположенной в радиальном направлении на диаметре, равном его делительному диаметру. При этом ползун установлен в корпусе с возможностью радиального перемещения относительно оси поворота водила. 2 с.п.ф-лы, 6 ил.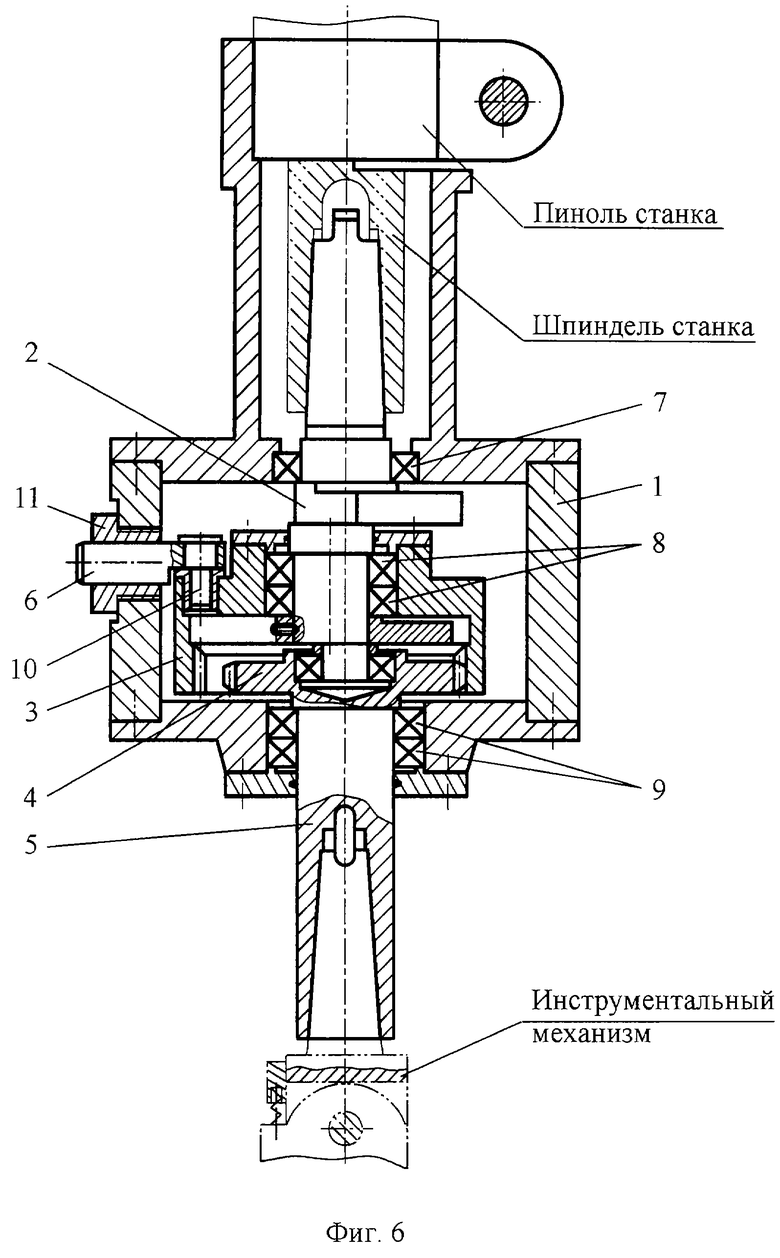
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ обработки некруглых поверхностей и устройство для его осуществления | 1990 |
|
SU1782696A1 |
| Устройство для сверления квадратных отверстий | 1983 |
|
SU1183305A1 |
| Способ обработки валов и отверстий и устройство для его осуществления | 1989 |
|
SU1740135A1 |
| Способ получения химопапаина | 1988 |
|
SU1838407A3 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

