Данное изобретение относится к измерительной технике, а именно, к компенсационным преобразователям линейных и угловых ускорений.
Известен преобразователь инерциальной информации, содержащий основание, чувствительный элемент с шестью степенями свободы, емкостные преобразователи линейного и углового положений, электростатические силовые преобразователи, усилители, к выходам которых подключены выходы преобразователей положения, а к выходам электростатические силовые преобразователи [1]
Недостатком такого преобразователя инерциальной информации является малый диапазон измерений вследствие ограничения величины напряжения, прилагаемого к электростатическому силовому преобразователю на верхнем пределе измерения.
Более высокий диапазон измерений обеспечивается в преобразователе инерциальной информации, содержащем основание, чувствительный элемент с шестью степенями свободы в системе координат ОХУZ, узлы ориентации чувствительного элемента относительно основания в системе координат ОХУZ, выполненные по мостовой схеме датчики линейного и углового положений с электродами емкостных преобразователей на чувствительном элементе и в узлах ориентации, магнитоэлектрические силовые преобразователи с постоянным магнитом, кольцевой компенсационной катушкой и магнитной системой у каждого силового преобразователя, дифференциальный усилитель для каждого датчика углового и линейного положений, причем компенсационные катушки расположены на чувствительном элементе, постоянный магнит выполнен в виде тела вращения относительно его оси, магнитная система силового преобразователя выполнена с рабочим зазором кольцевой формы, в котором размещена компенсационная катушка, а оси кольцевого рабочего зазора магнитной системы и компенсационной катушки совмещены с осью постоянного магнита [2]
Недостатком этого преобразователя инерциальной информации является громоздкость конструкции, так как по каждой оси координат необходимо устанавливать по шесть магнитоэлектрических силовых преобразователей. Размещение по каждой оси координат по шести магнитоэлектрических силовых преобразователей понижает точность измерения угловых ускорений вследствие малой разрешающей способности преобразователя инерциальной информации по угловому ускорению, так как при шести силовых преобразователях по одной оси координат невозможно обеспечить малое плечо действия силы, необходимое для компенсации динамического момента при измерении углового ускорения с точностью, соизмеримой с точностью компенсации инерционной силы при измерении линейного ускорения.
Целью изобретения является миниатюризация конструкции и повышение точности измерения углового и линейного ускорений.
Данная цель достигается в известном преобразователе инерциальной информации тем, что введены первый и второй суммирующие усилители по каждой из осей координат, чувствительный элемент выполнен из электропроводного материала в виде единого элемента из шести полых цилиндров, объединенных своими торцами, полые цилиндры расположены попарно по каждой из осей ОХ, ОУ, ОZ, точка пересечения которых совмещена с точкой пересечения осей полых цилиндров, узлы ориентации чувствительного элемента относительно основания размещены со стороны свободного торца каждого полого цилиндра, в основании выполнены шесть отверстий, по два относительно каждой из осей ОХ, ОУ, ОZ, каждый узел ориентации содержит цилиндрическую втулку, установленную в соответствующем отверстии основания концентрично соответствующему полому цилиндру чувствительного элемента, и электропроводную трубку с закрепленными на ее внутренней поверхности двумя парами электродов, электроизоляционная трубка установлена внутри цилиндрической втулки со стороны ее внутреннего торца и прикреплена к ее поверхности, электроды в каждой паре, первый и второй, третий и четвертый, установлены диаметрально, а электроды соседних пар, первый и третий, второй и четвертый, установлены последовательно от внутреннего торца к наружному вдоль поверхности электроизоляционной трубки, в наружном торце цилиндрической втулки выполнено цилиндрическое углубление, ось которого смещена относительно оси цилиндрической втулки на расстояние l:
где I момент инерции чувствительного элемента;
m масса чувствительного элемента;
εo минимальное измеряемое угловое ускорение;
аo минимальное измеряемое линейное ускорение, в цилиндрическом углублении втулки соосно ему установлена магнитная система магнитоэлектрического силового преобразователя с постоянным магнитом, а его компенсационная катушка прикреплена к свободному торцу полого цилиндра чувствительного элемента, расстояние между поверхностью полого цилиндра чувствительного элемента и поверхностью электродов выполнено не менее суммарного максимального перемещения чувствительного элемента при угловых и линейных перемещениях, в каждой паре магнитоэлектрических силовых преобразователей, установленных по одной из осей координат ОХ, ОУ, ОZ, их оси смещены в разные стороны относительно соответствующей оси координат, в каждой паре узлов ориентации чувствительного элемента по одной оси первые электроды и вторые электроды соответственно соединены между собой и образуют неподвижные электроды первого и второго конденсаторов, включенных в плечи мостовой схемы датчика линейного положения, а третьи электроды каждого узла ориентации из пары соединены с четвертыми электродами узла ориентации этой пары и образуют неподвижные электроды третьего и четвертого конденсаторов, включенных в плечи мостовой схемы датчика углового положения, при этом подвижные электроды конденсаторов образованы поверхностями полых цилиндров чувствительного элемента, подключенного посредством токоподвода к общему проводу мостовой схемы, диагональ мостовой схемы датчика линейного положения подключена к входам первого дифференциального усилителя, а диагональ мостовой схемы датчика углового положения к входам второго дифференциального усилителя, выходы первого и второго дифференциального усилителей подключены к суммирующим входам первого суммирующего усилителя, выход одного из дифференциальных усилителей подключен к прямому входу второго суммирующего усилителя, выход другого дифференциального усилителя подключен к инверсному входу второго суммирующего усилителя, к выходу первого суммирующего усилителя подключена компенсационная катушка одного силового преобразователя, а к выходу второго суммирующего усилителя компенсационная катушка другого силового преобразователя из пары силовых преобразователей, размещенных по одной из осей координат.
Путем введения первого и второго суммирующих усилителей по каждой из трех осей координат, выполнения чувствительного элемента из шести полых цилиндров из электропроводного материала, расположения полых цилиндров попарно по каждой из осей координат, выполнения каждого узла ориентации из цилиндрической втулки и электроизоляционной трубки с двумя парами электродов на ее внутренней поверхности, расположения электроизоляционной трубки внутри цилиндрической втулки на ее поверхности, расположения в каждой паре первого и второго, третьего и четвертого электродов диаметрально, а электродов соседних пар, первого и третьего, второго и четвертого последовательно вдоль поверхности электроизоляционной трубки, разнесения осей магнитных систем и компенсационных катушек по каждой оси от этой оси координат, смещения осей в каждой паре силовых преобразователей по одной оси в разные стороны от соответствующей оси координат, соединения между собой в каждой паре узлов ориентации первых и вторых электродов в качестве неподвижных электродов первого и второго конденсаторов, включенных в плечи мостовой схемы датчика линейного положения, соединения третьих электродов каждого узла ориентации из пары с четвертыми электродами в качестве неподвижных электродов третьего и четвертого конденсаторов, включенных в плечи мостовой схемы датчика углового положения, подключения датчика линейного положения к первому дифференциальному усилителю, датчика углового положения к второму дифференциальному усилителю, подключения выходов первого и второго дифференциальных усилителей к суммирующим входам первого суммирующего усилителя и к разнополярным входам второго суммирующего усилителя, подключения к выходу первого суммирующего усилителя одной компенсационной катушки, подключения к выходу второго суммирующего усилителя другой компенсационной катушки из пары силовых преобразователей, размещенных по одной из осей координат, обеспечивается измерение с использованием двух силовых преобразователей линейного ускорения по одной оси координат и углового ускорения по перпендикулярной ей другой оси координат. В результате измерение линейных ускорений по трем осям координат и угловых ускорений относительно трех осей координат обеспечивается с помощью шести силовых преобразователей вместо восемнадцати, что позволяет уменьшить габаритные размеры и массу преобразователя инерциальной информации.
Посредством расположения осей магнитной системы и компенсационной катушки силового преобразователя на расстоянии от оси координат, определяемом расчетным соотношением из условия равноточности измерения угловых и линейных ускорений, обеспечивается выполнение минимального расстояния между полярными осями магнитных систем и компенсационных катушек по одной оси координат, что позволяет выполнить более компактную конструкцию преобразователя инерциальной информации.
При выполнении в цилиндрической втулке узла ориентации цилиндрического углубления на торце свободного конца второго цилиндра втулки, расположении электродов на внутренней поверхности втулки, установки узла электродов по внешней поверхности трубки в отверстие первого цилиндра, расположения каждой полуоси в образованное свободной поверхностью электродов отверстие достигается дальнейшая миниатюризация конструкции преобразователя инерциальной информации.
Путем выполнения чувствительного элемента единым элементом из шести полых цилиндров, соединенных торцами, обеспечивается повышение точности измерения угловых и линейных ускорений за счет уменьшения погрешности от перекрестных связей вследствие повышения точности изготовления чувствительного элемента, а также за счет снижения температурной погрешности вследствие увеличения жесткости конструкции чувствительного элемента.
Посредством выполнения минимального расстояния оси магнитной системы и компенсационной катушки силового преобразователя в соответствии с расчетным соотношением обеспечивается наибольшая разрешающая способность измерения углового ускорения, в результате чего повышается точность измерения углового ускорения при помощи преобразователя инерциальной информации.
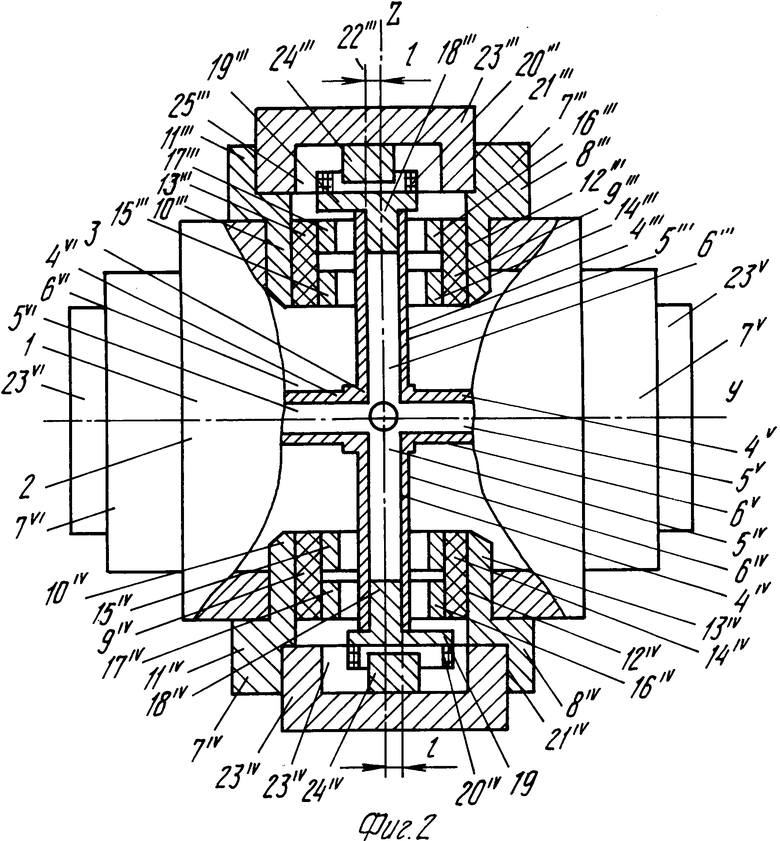
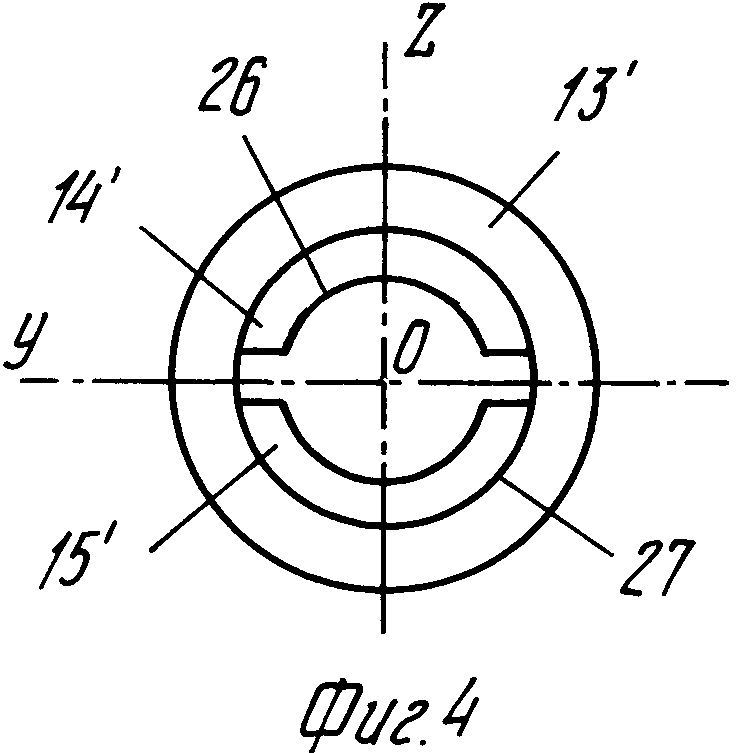
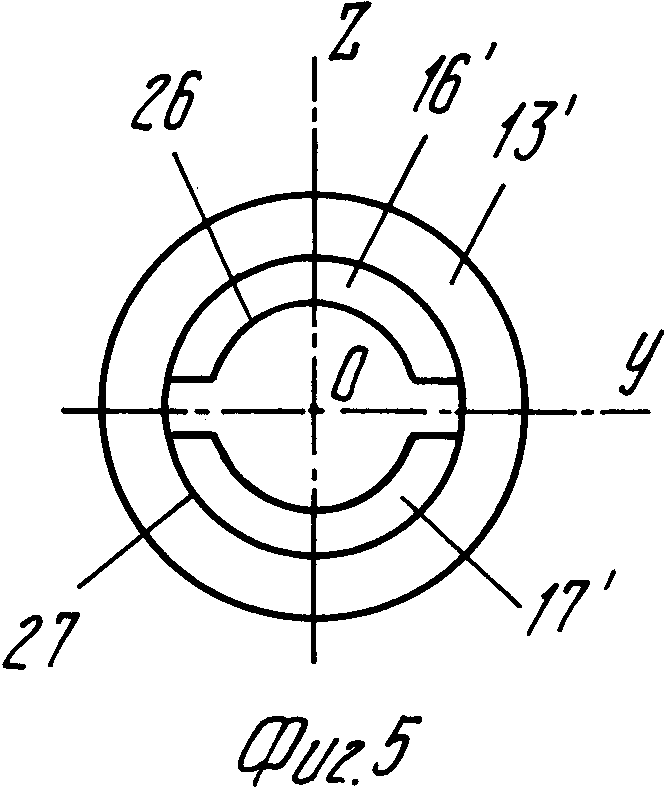
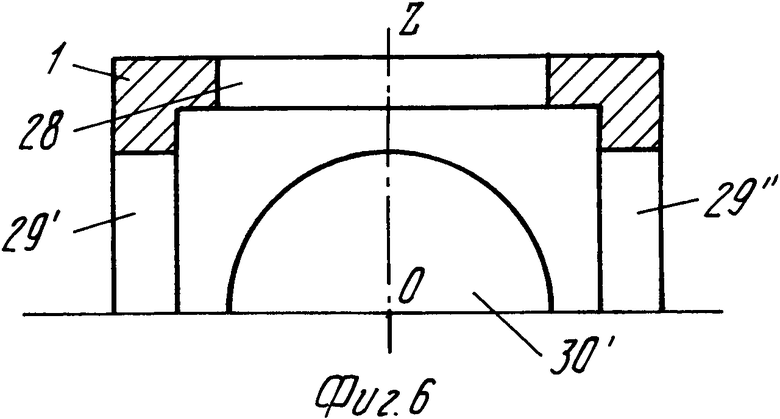
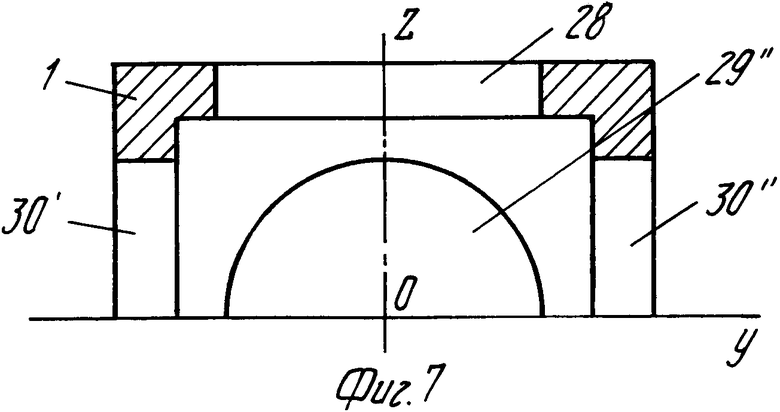
На фиг. 1 дан фронтальный вид предпочтительной конструкции выполнения преобразователя инерциальной информации; на фиг.2 профильный вид преобразователя инерциальной информации; на фиг.3 горизонтальный вид преобразователя инерциальной информации; на фиг. 4 вид узла электродов со стороны точки О системы координат; на фиг.5 вид узла электродов с противоположной стороны от точки О системы координат; на фиг.6 фронтальный вид одной части основания; на фиг. 7 профильный вид этой части основания; на фиг.8 схема измерения линейного ускорения по оси координат ОZ и углового ускорения относительно оси координат ОУ; на фиг.9 схема измерения линейного по оси координат ОУ и углового ускорения относительно оси координат ОХ; на фиг.10 схема измерения линейного ускорения по оси координат ОХ и углового ускорения относительно оси координат ОZ.
В преобразователе инерциальной информации (фиг.1-3) между первой частью 1 и второй частью 2 основания установлен чувствительный элемент 3, выполненный из электропроводного материала и имеющий три степени свободы линейного перемещения по осям ОХ, ОУ, ОZ системы координат ОХУZ, а также три степени свободы углового перемещения относительно осей ОХ, ОУ, ОZ. Чувствительный элемент 3 выполнен единым элементом из шести полых цилиндров 4I, 4II4VI, соединенных одними своими торцами. Пара полых цилиндров 4I, 4II расположена по оси ОХ, причем первый полый цилиндр 4I из пары расположен по одну сторону от точки о, а второй полый цилиндр 4II расположен симметрично относительно полого цилиндра 41 по другую сторону от точки 0. Пара полых цилиндров 4III, 4IV расположена по оси OZ, при этом первый полый цилиндр 4III из пары расположен по одну сторону от точки О, а второй полый цилиндр 4IV расположен симметрично по сравнению с полым цилиндром 4III по другую сторону от точки О. Пара полых цилиндров 4V, 4VI расположена по оси координат ОУ, причем полый цилиндр 4V, расположен по одну сторону от точки О, а полый цилиндр 4VI по другую сторону от точки О симметрично с полым цилиндром 4V. В полых цилиндрах 4I, 4II 4VI выполнены цилиндрические центральные отверстия 5I, 5II 5VI, концентричные с внешними цилиндрическими поверхностями 6I, 6II 6VI. Оси отверстий 5I, 5I совмещены с осью координат ОХ, оси отверстий 5III, 5IV с осью координат ОZ, оси отверстий 5V, 5VI с осью координат ОУ. Узлы ориентации 7I, 7II 7VI расположены со стороны свободных концов полых цилиндров 4I, 4II 4VI соответственно и содержат цилиндрические втулки 8I, 8II 8VI, а также узлы электродов 9I, 9II 9VI. Цилиндрические втулки 8I, 8II 8VI выполнены в виде первых 10I, 10II 10VI и вторых ступеней 11I, 11II 11VI. Цилиндрические втулки 8I, 8II 8VI имеют центральные отверстия 12I, 12II 12VI, в которых установлены узлы электродов 9I, 9II 9VI, имеющие электроизоляционные трубки 13I, 13II 13VI и по четыре электрода емкостных преобразователей положения: первые электроды 14I, 14II 14VI, вторые электроды 15I, 15II 15VI, третьи электроды 16I, 16II 16VI и четвертые электроды 17I, 17II 17VI. Первые электроды 14I, 14II 14VI и вторые электроды 15I, 15II 15VI расположены со стороны свободных концов первых степеней 10I, 10II 10VI. Третьи электроды 16I, 16II 16VI и четвертые электроды 17I, 17II 17VI расположены на стороне частей первых ступеней 10I, 10II 10VI, удаленных от их свободных концов.
Внутренние поверхности всех электродов 14, 15, 16, 17 расположены на цилиндрических поверхностях, находящихся напротив внешних цилиндрических поверхностях всех полых цилиндров 4 и расположенных симметрично с ними.
Разность между диаметром внутренней цилиндрической поверхности всех электродов 14, 15, 16, 17 и диаметром всех внешних цилиндрических поверхностей 6 и всех полых цилиндров 4 составляет не менее удвоенного суммарного перемещения чувствительного элемента 3 по оси ОZ при угловом и линейном ускорениях.
В центральные цилиндрические отверстия 5I, 5II 5VI полых цилиндров 4I, 4II 4VI с их свободных концов вставлены оправы 18I, 18II 18VI, на поверхностях площадок 19I, 19II 19VI которых, перпендикулярных осям координат ОХ, ОZ и ОУ соответственно, установлены кольцевые компенсационные катушки 20I, 20II 20VI магнитоэлектрических силовых преобразователей.
На торцах вторых ступеней 11I, 11II 11VI, расположенных на наибольшем удалении от точки О, образованы цилиндрические углубления 21I, 21II 21VI, оси 22I, 22II 22VI которых отстоят от осей координат ОХ, ОZ, ОУ соответственно на расстоянии l, определяемом соотношением
где I момент инерции чувствительного элемента;
m масса чувствительного элемента;
εo минимальное измеряемое угловое ускорение;
аo минимальное измеряемое линейное ускорение.
Оси 22I, 22II направлены вдоль оси координат ОХ, оси 22III, 22IV направлены вдоль оси координат ОZ, оси 22V, 22VI вдоль оси координат ОУ.
Магнитоэлектрические силовые преобразователи содержат магнитные системы 23I, 23II 23VI, постоянные магниты 24I, 24II 24VI цилиндрической формы как тела вращения и установлены своими магнитными системами 23I, 23II 23VI в цилиндрические углубления 21I, 21II 21VI. Между постоянными магнитами 24I, 24II 24VI и магнитными системами 23I, 23II 23VI образованы кольцевые рабочие зазоры 25I, 25II 25VI, в которые входят компенсационные катушки 20I, 20II 20VI.
Оси компенсационной катушки 20I, магнитной системы 23I, постоянного магнита 24I и рабочего зазора 25I совмещены с осью 22I и расположены в плоскости координат ХОZ на расстоянии l от оси координат ОХ по одну ее сторону в направлении оси ОZ. Оси компенсационной катушки 20II, магнитной системы 23II, постоянного магнит 24II и рабочего зазора 25II совмещены с осью 22II и расположены в плоскости координат ХОZ на расстоянии l от оси координат ОХ по другую ее сторону в направлении оси ОZ. Оси компенсационной катушки 20III, магнитной системы 23III, постоянного магнита 24IIII и рабочего зазора 25III совмещены с осью 22III и расположены в плоскости координат УОZ на расстоянии l от оси координат ОZ по одну ее сторону в направлении оси ОУ. Оси компенсационной катушки 20IV, магнитной системы 23IV, постоянного магнита 24IV и рабочего зазора 25IV совмещены с осью 22IV и расположены в плоскости координат УОZ на расстоянии l от оси координат ОZ по другую ее сторону в направлении оси ОУ. Оси компенсационной катушки 20V, магнитной системы 23V, постоянного магнита 24V и рабочего зазора 25V совмещены с осью 22V и расположены в плоскости координат ХОУ на расстоянии l от оси координат ОУ по одну ее сторону в направлении оси ОХ. Оси компенсационной катушки 20VI, магнитной системы 23VI, постоянного магнита 24VI и рабочего зазора 25VI совмещены с осью 22VI и расположены в плоскости координат ХОУ на расстоянии l от оси координат ОУ по другую ее сторону в направлении оси ОХ. Таким образом, в в совокупности всех силовых преобразователей оси постоянных магнитов, компенсационных катушек и магнитных систем расположены во всех трех плоскостях координат.
Первый электрод 14I и третий электрод 16I расположены симметрично относительно плоскости симметрии, совпадающей с плоскостью координат ХОУ, по сравнению со вторым электродом 15I и четвертым электродом 17I (фиг. 4,5). Внутренние свободные поверхности 26 электродов 14I, 15I, 16I, 17I расположены по цилиндрической поверхности, концентричной с цилиндрической поверхностью отверстия 12I в цилиндрической втулке 8I, напротив внешней цилиндрической поверхности 6I полого цилиндра 4I.
Первый электрод 14II и третий электрод 16II симметричны второму электроду 15II и четвертому электроду 17II относительно плоскости координат ОХУ. Аналогично электроды 14III, 14IV, 16III, 16IV расположены симметрично электродам 15III, 15IV, 17III, 17IV относительно плоскости координат ХОZ, электроды 14V, 14VI, 16V, 16VI симметрично электродам 15V, 15VI, 17V, 17VI относительно плоскости координат УОZ.
Свободная цилиндрическая поверхность электродов 14II, 15II, 16II, 17II расположена напротив внешней цилиндрической поверхности 6II полого цилиндра 4II. Свободные цилиндрические поверхности электродов 14III 14IV, 15III 15IV, 16III 16IV 17III 17IV расположены напротив внешних цилиндрических поверхностей 6III 6IV полых цилиндров 4III 4IV соответственно.
Первая часть основания 1 (фиг. 6,7) и вторая часть 2 выполнены аналогично и соприкасаются друг с другом по плоскости координат ХОУ. Ось отверстия 28 направлена по оси координат ОZ, симметрично с ней относительно точки О во второй части 2 основания образовано аналогичное отверстие, в которых установлены узлы ориентации 7III, 7I. В первой части 1 основания по оси координат ОХ образованы выемки 29I, 29II, по оси координат ОУ выемки 30I, 30II. Аналогичные выемки образованы во второй части 2 основания. Выемки 29I, 29II, 30I, 30II в части 2 основания образуют цилиндрические отверстия, в которых установлены узлы ориентации 7I, 7II, 7V, 7VI.
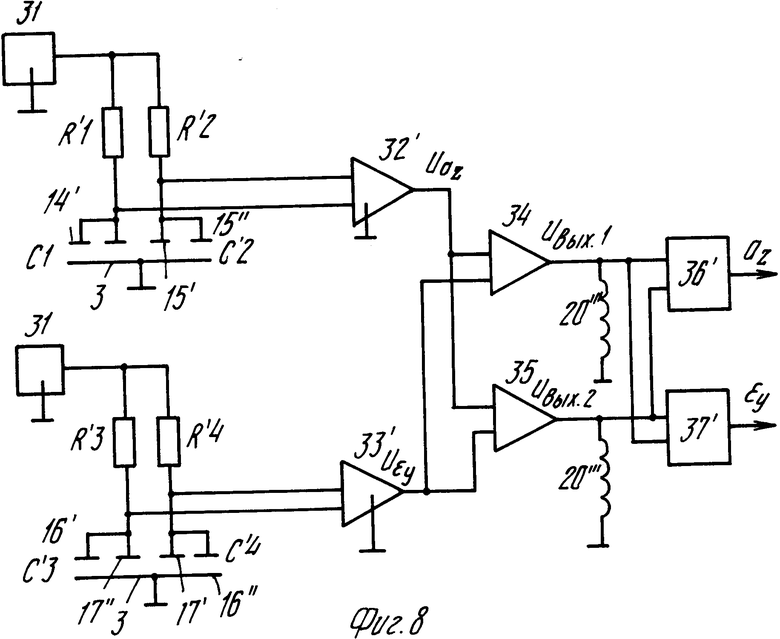
В датчике линейного положения (фиг.8) по оси координат ОZ в одно плечо его мостовой схемы включен первый конденсатор СI 1, неподвижный электрод которого образован соединенными вместе первыми электродами 14I, 14II узлов ориентации 7I, 7II по оси координат ОХ, а подвижный электрод электропроводной поверхностью полых цилиндров 4I, 4II чувствительного элемента 3, подключенного с помощью токоподвода к общему проводу. Во второе плечо включен второй конденсатор СI2, неподвижный электрод которого образован соединенными вместе вторыми электродами 15I, 15II, а подвижный электрод - поверхностью полых цилиндров 4I, 4II. В два других плеча включены резисторы RI1, RII2. Питание датчика линейного положения осуществляется от генератора 31 переменной ЭДС. Выходная диагональ мостовой схемы соединена с входами первого дифференциального усилителя 32I.
В датчике углового положения относительно оси координат ОУ в одно плечо мостовой схемы включен третий конденсатор СI3, неподвижный электрод которого выполнен в виде соединенных вместе третьего 16I и четвертого 17II электродов, расположенных по разные стороны от точки О по оси координат ОХ. Подвижный электрод конденсатора СI3 образован поверхностями полых цилиндров 4I, 4II чувствительного элемента 3. Во второе плечо включен четвертый конденсатор СI4, неподвижный электрод которого образован соединенными вместе с третьим 16II и четвертым 17I электродами, а подвижный электрод полыми цилиндрами 4I, 4II. В два других плеча включены резисторы RI3, RI4. Выходная диагональ датчика углового положения включена на входы второго дифференциального усилителя 33I. Выходы первого дифференциального усилителя 32I и второго дифференциального усилителя 33I включена на суммирующие входы первого суммирующего усилителя 34I. Выход одного из дифференциальных усилителей 32I, 33I подключен к прямому входу второго суммирующего усилителя 35I, выход второго дифференциального усилителя к инверсному входу второго суммирующего усилителя 35I. Компенсационная катушка 20III силового преобразователя по оси ОZ, ось которой совпадает с осью 22III и направлена по оси координат ОZ, подключена к выходу первого суммирующего усилителя 34I, а компенсационная катушка 20IV к выходу второго суммирующего усилителя 35I. Выходы первого суммирующего усилителя 34I и второго суммирующего усилителя 35I подключены к двум входам сумматора 36I, а также к двум входам устройства вычитания 37I.
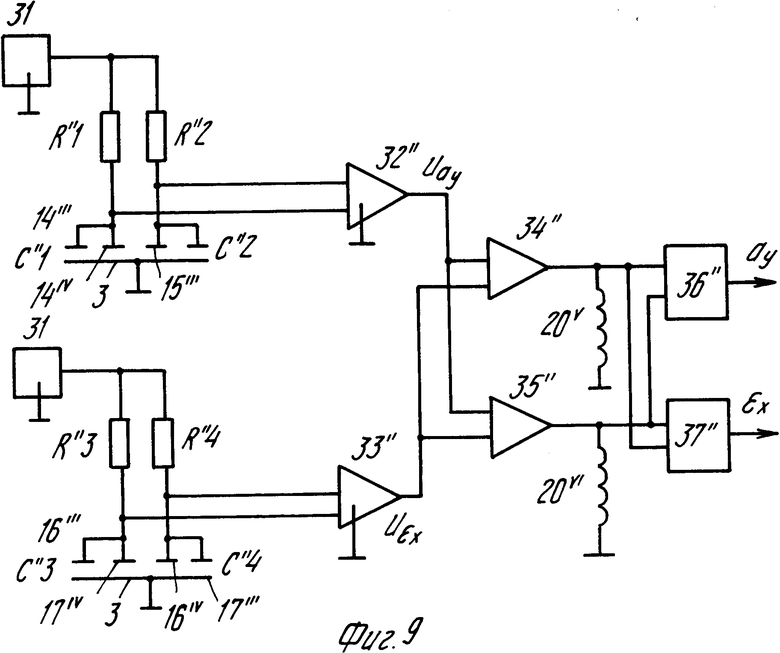
В датчике линейного положения по оси координат ОУ (фиг.9) неподвижный электрод первого конденсатора СII1 образован соединенными вместе первыми электродами 14III, 14IV узлов ориентации 7III, 7IV по оси координат ОZ, а подвижный электрод полыми цилиндрами 4III, 4IV. Неподвижный электрод второго конденсатора СII2 образован соединенными вместе вторыми электродами 15III, 15IV, а подвижный электрод полыми цилиндрами 4IIII, 4IV чувствительного элемента 3. В два плеча мостовой схемы датчика линейного положения включены резисторы RII1 и RII. Выход датчика линейного положения подключен к двум входам первого дифференциального усилителя 32II. Неподвижный электрод третьего конденсатора СII3 датчика углового положения относительно оси координат ОХ образован соединенными вместе третьим 16III и четвертым 17IV электродами, а подвижный электрод полыми цилиндрами 4III, 4IV. У четвертого конденсатора СII4 неподвижный электрод выполнен соединенными вместе третьим 16I и четвертым 17III электродами, подвижный электрод образован полыми цилиндрами 4III, 4I. В остальные плечи мостовой схемы датчика углового положения включены резисторы RII3, RII4. Выход мостовой схемы датчика углового положения подключен к двум входам второго дифференциального усилителя 33II. Выходы первого 32II и второго 33II дифференциальных усилителей подключены к двум суммирующим входам первого суммирующего усилителя 34II. Выход одного из первого 32II и второго 33II дифференциальных усилителей подключен к прямому входу второго суммирующего усилителя 35II, выход другого дифференциального усилителя из числа дифференциальных усилителей 32II, 33II подключен к инверсному входу второго суммирующего усилителя 35II. Компенсационная катушка 20V первого силового преобразователя по оси координат ОУ подключена к выходу первого суммирующего усилителя 34II, компенсационная катушка 20IV второго силового преобразователя по оси ОУ подключена к выходу второго суммирующего усилителя 35II. Выходы первого 34II и второго 35II суммирующих усилителей подключены к двум входам сумматора 36II, а также к двум входам устройства вычитания 37II.
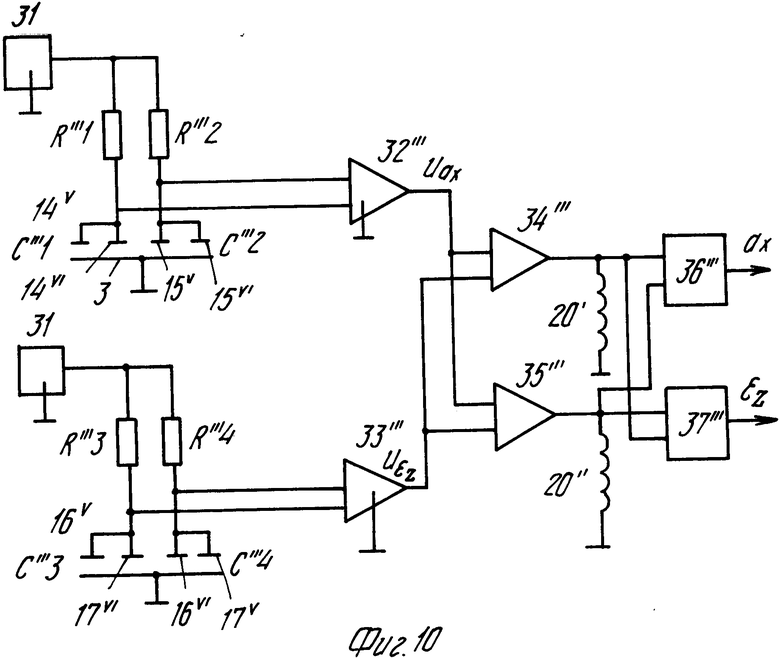
В датчике линейного положения (фиг.10) по оси координат ОХ неподвижный электрод первого конденсатора СIII1 образован соединенными вместе первыми электродами 14V, 14VI, а подвижным электродом являются полые цилиндры 4V, 4VI. У второго конденсатора СIII2 неподвижным электродом служат соединенные вместе вторые электроды 15V, 15VI, подвижным электродом полые цилиндры 4V, 4VI. В мостовую схему датчика линейного положения также включены резисторы RIII1, RIII2. Выход датчика линейного положения подключен к входам первого дифференциального усилителя 32III. В датчике углового положения относительно оси координат ОZ неподвижный электрод третьего конденсатора СIII3 образован соединенными вместе третьим 16V и четвертым 17VI электродами, подвижный электрод образован полыми цилиндрами 4V, 4VI. Неподвижный электрод четвертого конденсатора СIII4 образован соединенными вместе третьим электродом 16VI и четвертым электродом 17V, подвижный электрод полыми цилиндрами 4V, 4VI. В другие плечи мостовой схемы включены резисторы RIII3, RIII4. Выход датчика углового положения подключен к входам второго дифференциального усилителя 33III. Выходы первого 32III и второго 33III дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя 34III. Выход одного из дифференциальных усилителей 32III, 33III подключен к суммирующему входу второго суммирующего усилителя 35III, выход другого из дифференциальных усилителей 32III, 33III подключен к инверсному входу второго суммирующего усилителя 35III.
К выходу первого суммирующего усилителя 34III подключена компенсационная катушка 20I первого силового преобразователя по оси координат ОХ, у которого оси магнитной системы 23I и постоянного магнита 24I расположены по оси 22I. К выходу второго суммирующего усилителя 35III подключена компенсационная катушка 20II второго силового преобразователя по оси координат ОХ, у которого оси магнитной системы 23II и постоянного магнита 24II расположены по оси 22II.
Выходы первого 34III и второго 35III суммирующих усилителей подключены к входам сумматора 36III, а также к входам устройства вычитания 37III.
В качестве сумматоров 36I, 36II, 36III и устройств вычитания 37I, 37II, 37III могут служить суммирующие усилители. В этом случае выходы первых суммирующих усилителей 34I, 34II, 34III и вторых суммирующих усилителей 35I, 35II, 35III соединены с суммирующими входами сумматоров 36I, 36II, 36III, выходы например, первых суммирующих усилителей 34I, 34II, 34III соединены с прямыми входами устройств вычитания 37I, 37II, 37III, а выходы вторых суммирующих усилителей 35I, 35II, 35III с инверсными входами устройств вычитания 37I, 37II, 37III.
Преобразователь инерциальной информации работает следующим образом. При наличии, например, линейного ускорения аz по оси координат ОZ и углового ускорения εу относительно оси координат ОУ, на чувствительный элемент 3 действует инерционная сила Fz и динамический момент My:
Fz maz, (2)
где m масса чувствительного элемента 3.
Mу = Iεу, (3)
где I момент инерции чувствительного элемента 3.
Пусть направление ускорения аz и углового ускорения εу таковы, что чувствительный элемент поступательно перемещается по направлению к первым электродам 14I, 14II и третьим электродам 16I, 16II (фиг.1), и происходит угловое перемещение чувствительного элемента 3, при котором полый цилиндр 4I приближается к первому электроду 14I и третьему электроду 16I, а полый цилиндр 4II сближается со вторым электродом 15II и четвертым электродом 17II. Тогда емкость конденсатора СI1 (фиг.8) увеличивается, емкость конденсатора СI2 уменьшается, мостовая схема датчика линейного положения по оси ОZ разбалансируется, и с ее выхода поступает сигнал разбаланса на вход первого дифференциального усилителя 32I, выходной сигнал  которого пропорционален ускорению аz:
которого пропорционален ускорению аz:
где К1 коэффициент преобразования первого дифференциального усилителя 32I и второго дифференциального усилителя 33I.
Одновременно увеличивается емкость конденсатора СI3 и уменьшается емкость конденсатора СI4, происходит разбаланс мостовой схемы датчика углового положения относительно оси ОУ. После усиления сигнала разбаланса во втором дифференциальном усилителе 33I напряжение  на его выходе пропорционально угловому ускорению εу.
на его выходе пропорционально угловому ускорению εу.
После суммирования в первом суммирующем усилителе 34I его выходной сигнал имеет вид
где K2 коэффициент преобразования первого 34I и второго 35I суммирующих усилителей.
На выходе второго суммирующего усилителя 35I, так как входные сигналы поступают на его прямой и инвертирующий входы, получается напряжение
В магнитоэлектрическом силовом преобразователе при взаимодействии магнитного потока, созданного протеканием через компенсационную катушку тока при наличии выходного напряжения суммирующего усилителя с магнитным полем постоянного магнита, электрический ток преобразуется в механическую силу. Поэтому при наличии на выходе первого суммирующего усилителя 341 выходного напряжения Uвых.1 при протекании через компенсационную катушку 20III тока создается компенсационная сила  от одного силового преобразователя по оси координат ОZ, действующая по оси 22III:
от одного силового преобразователя по оси координат ОZ, действующая по оси 22III:
где K коэффициент преобразования силового преобразователя.
При наличии на выходе второго суммирующего усилителя 35 выходного напряжения Uвых.2 при прохождении через компенсационную катушку 20IV тока от второго силового преобразователя по оси координат ОZ, действующая по оси 22IV
Фазы и полярности сигналов, начиная с датчиков положения и заканчивая компенсационными катушками, установлены такими, что компенсационные силы  направлены в одну сторону.
направлены в одну сторону.
Компенсационная сила Fк, действующая по оси координат ОZ равна
Так как сила  не равна сила
не равна сила  , а их оси приложения отстоят от оси ОZ на расстояние l, то вокруг оси ОУ создается компенсационный момент Мк.
, а их оси приложения отстоят от оси ОZ на расстояние l, то вокруг оси ОУ создается компенсационный момент Мк.

Посредством компенсационной силы Fк производится компенсация инерционной силы Fz, вызванной линейным ускорением аz по оси координат ОZ:
Fz Fк (12)
Тогда
maz = 2Kk2uaz (13)
С помощью компенсационного момента Мк производится компенсация динамического момента Мy, созданного угловым ускорением εу относительно оси координат ОУ:
Мy Мк (14)
Поэтому
Чтобы точности измерения минимального измеряемого линейного ускорения  и минимального измеряемого углового ускорения
и минимального измеряемого углового ускорения  были равны, необходимо выполнить условие
были равны, необходимо выполнить условие ,
,
где Uвых.0 выходное напряжение каждого из суммирующих усилителей 34I, 35I при минимальных значениях линейного и углового ускорений. При подстановке в выражение (13), (15) условия (16) получим . Поделив соответствующие части выражений (18) и (17) друг на друга, получим
. Поделив соответствующие части выражений (18) и (17) друг на друга, получим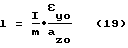 .
.
Таким образом, в выражении (19) сформулировано условие равноточности измерения линейного и углового ускорений.
Вследствие компенсации инерционной силы Fz по оси координат ОZ и динамического момента Мy относительно оси координат ОУ компенсационной силой Fк и компенсационным моментом Мк, создаваемым силовым преобразователями по оси координат ОZ, производится отслеживание поступательного перемещения чувствительного элемента 3 по оси координат ОZ и его углового перемещения относительно оси координат ОУ.
После суммирования в сумматоре 36I выходных сигналов первого суммирующего усилителя 34I и второго суммирующего усилителя 35I на его выходе получается сигнал UI, пропорциональный измеряемому линейному ускорению аz
После преобразования в устройстве вычитания 37I выходных сигналов первого 34I и второго 35I суммирующих усилителей на выходе устройства вычитания 37I имеется сигнал U2, пропорциональный измеряемому угловому ускорению εу:
Таким образом, производится измерение линейного ускорения по оси координат ОZ и углового ускорения относительно оси координат ОУ.
Аналогично при поступательном движении чувствительного элемента 3 (фиг. 10) по оси координат ОУ при наличии линейного ускорения аy по оси ОУ и его угловом перемещении относительно оси координат ОХ при угловом ускорении εx относительно оси ОХ производится компенсация инерционной силы и динамического момента компенсационной силой и компенсационным моментом, создаваемыми силовыми преобразователями по оси координат ОУ. В результате с выхода сумматора 36II поступает сигнал, пропорциональный линейному ускорению аy по оси координат ОУ, а с выхода устройства вычитания 37II сигнал, пропорциональный угловому ускорению εx относительно оси координат ОХ.
Так же при поступательном перемещении чувствительного элемента 3 (фиг. 11) по оси координат ОХ при наличии линейного ускорения аz по оси ОХ и его угловом перемещении относительно оси координат ОZ при наличии углового ускорения εz относительно оси ОZ производится компенсация инерционной силы и динамического момента компенсационной силой и компенсационным моментом, создаваемыми силовыми преобразователями по оси координат ОХ. Вследствие этого с выхода сумматора 36III поступает сигнал, пропорциональный измеряемому линейному ускорению аx по оси координат ОХ, а с выхода устройства вычитания 37III сигнал пропорциональный измеряемому угловому ускорению εz относительно оси координат ОZ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
Использование: в измерительной технике, для измерения линейных и угловых ускорений. Сущность изобретения: в преобразователе инерциальной информации, содержащем основание, чувствительный элемент, датчики углового и линейного положений, магнитоэлектрические силовые преобразователи, дифференциальные усилители, чувствительный элемент выполнен единым элементом из шести полых цилиндров, полярные оси компенсационных катушек и постоянных магнитов силовых преобразователей смещены от осей цилиндров на расстояние, обеспечивающее равноточность измерения углового и линейного ускорений, введены первый и второй суммирующие усилители, компенсационные катушки силовых преобразователей подключены к выходам суммирующих усилителей. 10 ил.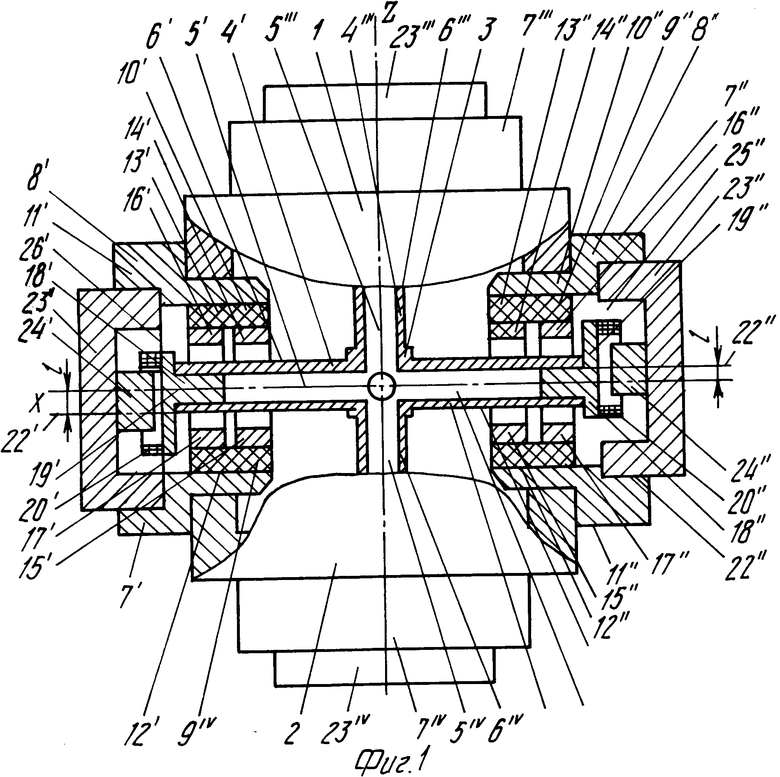
Преобразователь инерциальной информации, содержащий основание, чувствительный элемент с шестью степенями свободы в системе коррдинат OXYZ, узлы ориентации чувствительного элемента относительно основания в системе координат OXYZ, выполненные по мостовой схеме датчики линейного и углового положения с электродами емкостных преобразователей на ЧЭ и в узлах ориентации, магнитоэлектрические силовые преобразователи с постоянным магнитом, кольцевой компенсационной катушкой и магнитной системой, дифференциальный усилитель для каждого датчика линейного и углового положения, причем компенсационные катушки расположены на чувствительном элементе, постоянный магнит выполнен в виде тела вращения относительно его оси, магнитная система выполнена с рабочим зазором кольцевой формы, в котором размещена компенсационная катушка, а оси кольцевого рабочего зазора магнитной системы и компенсационной катушки совмещены с осью постоянного магнита, отличающийся тем, что в него введены первый и второй суммирующие усилители по каждой из осей координат, чувствительный элемент выполнен из электропроводного материала в виде единого элемента из шести полых цилиндров, объединенных своими торцами, полые цилиндры расположены попарно по каждой из осей OX, OY, OZ, точка пересечения которых совмещена с точкой пересечения осей полых цилиндров, узлы ориентации чувствительного элемента относительно основания размещены со стороны свободного торца каждого полого цилиндра, в основании выполнены шесть отверстий, по два относительно каждой из осей OX, OY, OZ, каждый узел ориентации содержит цилиндрическую втулку, установленную в соответствующем отверстии основания концентрично соответствующему полому цилиндру чувствительного элемента, и электроизоляционную трубку с закрепленными на ее внутренней поверхности двумя парами электродов, электроизоляционная трубка установлена внутри цилиндрической втулки со стороны ее внутреннего торца и прикреплена к ее поверхности, электроды в каждой паре первый и второй, третий и четвертый установлены диаметрально, а электроды соседних пар первый и третий, второй и четвертый установлены последовательно от внутреннего торца к наружному вдоль поверхности электроизоляционной трубки, в наружном торце цилиндрической втулки выполнено цилиндрическое углубление, ось которого смещена относительно оси цилиндрической втулки на расстояние
где I момент инерции;
m масса чувствительного элемента;
εo - минимальное измеряемое угловое ускорение;
aо минимальное измеряемое линейное ускорение,
в цилиндрическом углублении втулки соосно c ним установлена магнитная система магнитоэлектрического силового преобразователя с постоянным магнитом, а его компенсационная катушка прикреплена к свободному торцу полого цилиндра чувствительного элемента, расстояние между поверхностью полого цилиндра чувствительного элемента и поверхностью электродов не менее суммарного максимального перемещения чувствительного элемента при угловых и линейных ускорениях, в каждой паре магнитоэлектрических силовых преобразователей, установленных по одной из осей координат OX, OY, OZ, их оси смещены в разные стороны относительно соответствующей оси координат, в каждой паре узлов ориентации чувствительного элемента по одной оси первые и вторые электроды соответственно соединены между собой и образуют неподвижные электроды первого и второго конденсаторов, включенных в плечи мостовой схемы датчика линейного положения, а третьи электроды каждого узла ориентации из пары соединены с четвертыми электродами другого узла ориентации этой пары и образуют неподвижные электроды третьего и четвертого конденсаторов, включенных в плечи мостовой схемы датчика углового положения, при этом подвижные электроды конденсаторов образованы поверхностями полых цилиндров чувствительного элемента, подключенного посредством токоподвода к общему проводу мостовой схемы, диагональ мостовой схемы датчика линейного положения подключена к входам первого дифференциального усилителя, а диагональ мостовой схемы датчика углового положения к входам второго дифференциального усилителя, выходы первого и второго дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя, выход одного из дифференциальных усилителей подключен к прямому входу второго суммирующего усилителя, выход другого дифференциального усилителя подключен к инверсному входу второго суммирующего усилителя, к выходу первого суммирующего усилителя подключена компенсационная катушка одного силового преобразователя, а к выходу второго суммирующего усилителя компенсационная катушка другого силового преобразователя из пары силовых преобразователей, размещенных по одной из осей координат.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| FR, патент 2511509, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент 4711125, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
