Изобретение относится к электрифицированному транспорту и может быть использовано в системах электроснабжения тяги для определения удаленности короткого замыкания в контактной сети переменного тока.
Способ
Известен способ для определения удаленности короткого замыкания в контактной сети по параметрам аварийного режима, реализованный в устройстве /1/. Он заключается в измерении напряжения UA на шинах подстанции и тока фидера I'1 поврежденной контактной сети и вычислении параметра Z по формуле:
на основании которого судят об удаленности места короткого замыкания.
Этот способ реализован и в устройствах /2/. Ему присуща низкая точность из-за влияния сопротивления дуги в месте короткого замыкания и нелинейной зависимости сопротивления рельсов от расстояния из-за шунтирующего влияния земли. Кроме того, на двухпутных участках между величиной Z и расстоянием до места короткого замыкания нет прямой зависимости из-за индуктивного влияния тока контактной сети смежного пути. По указанным причинам погрешность при определении расстояния до места короткого замыкания по величине Z может достичь 4 км и более, что лишает смысла применение этого способа.
Известен способ для определения места короткого замыкания в контактной сети железных дорог переменного тока, реализованный в устройстве /3/. Его можно сформулировать как способ определения удаленности места повреждения по параметрам аварийного режима путем измерения напряжения UA на шинах подстанции, тока I'1 фидера поврежденной контактной сети и фазового угла ϕ1 между ними и вычислении функции:
на основании которой судят об удаленности места короткого замыкания.
Способ более точен, чем предыдущий, поскольку при одностороннем питании контактной сети сопротивление электрической дуги, имеющей практически только активную составляющую, не вносит погрешность в зависимость параметра Х от расстояния до места повреждения. Однако при двухстороннем питании, которое является основным, электрическая дуга оказывает влияние на параметр X, изменяя зависимость между параметром Х и расстоянием до места повреждения. Кроме того, на этот параметр оказывает влияние нелинейная зависимость сопротивления рельсов от удаленности короткого замыкания за счет шунтирующего влияния земли и взаимная индуктивная связь контактных сетей смежных путей. По этим причинам погрешность определения удаленности короткого замыкания по параметру Х при двухстороннем питании может достичь 2 км и более, что так же является недопустимо большим.
Известен способ определения удаленности короткого замыкания, реализованный в устройстве /4/, имеющий наибольшее число существенных признаков, совпадающих с предлагаемым изобретением. Его можно сформулировать как способ определения удаленности места повреждения по параметрам аварийного режима путем измерения тока IA плеча питания подстанции, напряжения UA на шинах подстанции, тока I'1 фидера поврежденной контактной сети и фазового угла ϕ1 между ними, отличающийся тем, что задаются расстоянием lK до места короткого замыкания и методом последовательных приближений определяют удаленность lK короткого замыкания в результате систематического вычисления коэффициента νA, учитывающего снижение сопротивления рельсовой цепи из-за шунтирующего влияния земли, дополнительного угла δ, зависящих от удаленности места короткого замыкания, и функции:
где Xc,1 - индуктивная составляющая индуктивно развязанного сопротивления 1 км контактной сети одного пути;
Хр,m - индуктивная составляющая индуктивно развязанного сопротивления 1 км рельсового пути m-путного участка;
Хвс - индуктивная составляющая сопротивления, учитывающего взаимную индуктивную связь контактных сетей смежных путей на длине 1 км.
При этом дополнительный угол δ определяется по отношению удаленности короткого замыкания lK к расстоянию до поста секционирования.
Недостатками этого способа являются: использование информации о токе IA плеча питания и недостаточная информация о функциональной зависимости дополнительного угла δ, снижающие точность определения удаленности lK короткого замыкания. Первый недостаток связан с тем, что ток плеча питания IA, как известно, содержит не только составляющую тока короткого замыкания контактной сети, но и составляющие тока собственных нужд подстанции и тока высоковольтной линии ДПР (два провода - рельсы), используемой для питания нетяговых потребителей. Второй недостаток связан с тем, что угол δ зависит не столько от отношения удаленности короткого замыкания lK к расстоянию до поста секционирования, как принято в этом способе, сколько от соотношения сопротивлений схемы замещения контактной сети, которая в свою очередь зависит от ее схемы питания.
Указанные недостатки приводят к снижению точности определения расстояния lK на основании приведенной функции.
Техническим результатом изобретения является повышение точности и упрощение. Повышение точности достигается за счет использования другой последовательности других операций. Упрощение обеспечивается тем, что ток IA плеча питания измерять не нужно.
Сущность изобретения заключается в том, что для определения удаленности короткого замыкания в контактной сети переменного тока, по параметрам аварийного режима путем измерения на шинах подстанции А напряжения UA, тока I'1 фидера поврежденной контактной сети и фазового угла ϕ1 между ними, задаются начальным значением расстояния lK до места короткого замыкания и методом последовательных приближений определяют удаленность lK короткого замыкания в результате систематического вычисления для данной схемы питания межподстанционной зоны по известным формулам значения коэффициентов νA и νB, учитывающих снижение сопротивления рельсовой цепи на участках от смежных подстанций А и В соответственно до точки короткого замыкания из-за шунтирующего влияния земли, и функций:



где  - заданные комплексные сопротивления смежных подстанций А и В;
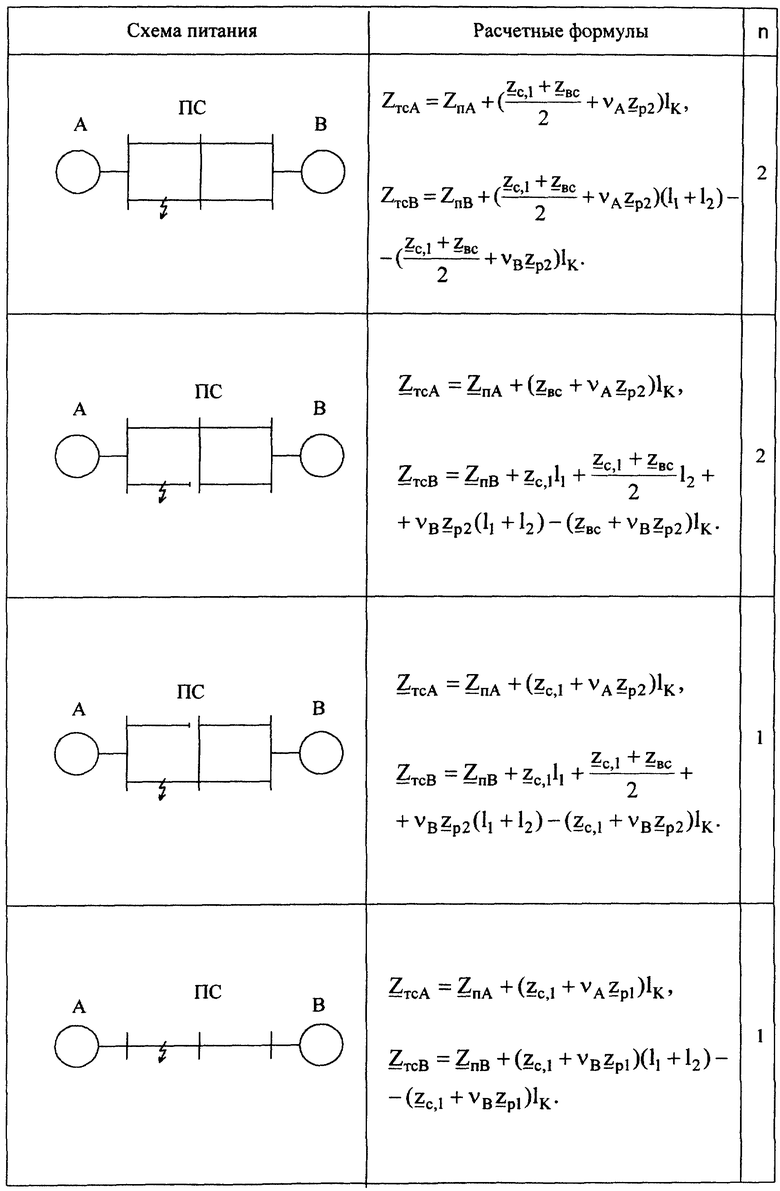
- заданные комплексные сопротивления смежных подстанций А и В; - комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от подстанции А и от подстанции В до точки короткого замыкания, вычисляемые при данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
- комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от подстанции А и от подстанции В до точки короткого замыкания, вычисляемые при данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
I1 - заданное расстояние от подстанции А до поста секционирования;
n - число путей, по контактной сети которых на участке от подстанции А до поста секционирования протекает ток, зависящее от схемы питания; - заданное комплексное индуктивно развязанное сопротивление 1 км контактной сети одного пути;
- заданное комплексное индуктивно развязанное сопротивление 1 км контактной сети одного пути; - заданное комплексное индуктивно развязанное сопротивление 1 км рельсовой цепи всех путей;
- заданное комплексное индуктивно развязанное сопротивление 1 км рельсовой цепи всех путей; - заданное комплексное индуктивно развязанное сопротивление 1 км, учитывающее взаимную индуктивную связь контактных сетей разных путей и равное нулю на однопутном участке или при отключенной контактной сети всех смежных путей на многопутном участке.
- заданное комплексное индуктивно развязанное сопротивление 1 км, учитывающее взаимную индуктивную связь контактных сетей разных путей и равное нулю на однопутном участке или при отключенной контактной сети всех смежных путей на многопутном участке.
Значения коэффициентов νA и νB вычисляют по известной формуле:
где m - известная величина, зависящая от сопротивления контура рельсы - земля и высоты подвешивания контактной сети;
γ - известный коэффициент распространения рельсового пути.
При L=lK получают ν = νA, при L=l1+l2=l - lк получают ν = νB,
где l2 - заданное расстояние от подстанции В до поста секционирования;
l - заданное расстояние от подстанции А до подстанции В.
В таблице приведены в качестве примера некоторые возможные схемы питания межподстанционной зоны и формулы для вычисления комплексных сопротивлений  для каждой из них. В этих формулах:
для каждой из них. В этих формулах:  - заданные индуктивно развязанные комплексные сопротивления 1 км рельсовой цепи соответственно однопутного и двухпутного участков. Формулы для вычисления сопротивлений
- заданные индуктивно развязанные комплексные сопротивления 1 км рельсовой цепи соответственно однопутного и двухпутного участков. Формулы для вычисления сопротивлений  для других возможных схем питания приведены в /6,7/.
для других возможных схем питания приведены в /6,7/.
Применение способа поясняется на фиг.1, где приведена схема питания межподстанционной зоны между смежными подстанциями А и В с постом секционирования ПС (фиг.1,а) и ее схема замещения (фиг.1,б). Повреждение расположено в точке К на расстоянии lK от подстанции А. Расстояние от поста ПС до подстанции А равно l1, а до подстанции В равно l2, причем l1+l2=l. Измерение на шинах подстанции А напряжения UA, тока I'1 поврежденной контактной сети и фазового угла ϕ1 между ними осуществляется с помощью измерительных трансформаторов напряжения TV и тока ТА. Схема замещения, приведенная на фиг.1,б соответствует известной /5/ и служит для обоснования принятых функциональных зависимостей.
По сравнению с известным способом, реализованным в /4/, такие признаки как измерение напряжения UA на шинах подстанции, тока I'1 фидера поврежденной контактной сети и фазового угла ϕ1 между ними, вычисление дополнительного угла δ, коэффициента νA и метод последовательных приближений для определения удаленности lК короткого замыкания являются совпадающими.
Новыми признаками являются операции по определению численных значений промежуточных параметров D,δ,N,αN,zэ,αэ и расстояния lК до места повреждения на основании функциональных зависимостей (1) - (7).
Способ используется следующим образом. При коротком замыкании контактной сети в какой-либо точке К на участке от подстанции А до поста секционирования ПС (фиг. 1, а) измеряют на шинах подстанции А напряжения UA, ток I'1 контактной сети поврежденного фидера и фазовый угол ϕ1 между ними. Затем задаются начальным значением расстояния lK, например l'K=0 и на основании функциональных зависимостей (1) - (6) вычисляют значения промежуточных параметров D,δ,N,αN,zэ и αэ, используя формулы, приведенные в таблице. Эти промежуточные значения затем используют в функциональной зависимости (7), на основании которой определяют удаленность места повреждения lК.
Если полученное значение lК не совпадает с тем начальным значением l'К, которым задавались, то задаются другим значением l'К (например, l'К=0,05 км) и снова вычисляют промежуточные параметры D,δ,N,αN,zэ и αэ, по формулам (1) - (6) которые подставляют в функциональную зависимость (7). Такая последовательность операций (вычислений) повторяется до тех пор, пока задаваемое значение расстояния l'К численно не совпадет с расстоянием lК, определенным на основании функциональной зависимости (7).
Вычисление модулей и аргументов комплексных чисел осуществляется по известным в математике правилам.
Устройство
Известно устройство для определения места короткого замыкания в контактной сети /1/. Оно содержит датчик тока, датчик напряжения, блок деления и блок регистрации. При коротком замыкании датчик тока фиксирует ток I'1, датчик напряжения фиксирует напряжение сети UA, блок деления осуществляет операцию  а блок регистрации фиксирует результат деления Z, по значению которого судят об удаленности места короткого замыкания. Конструкции подобных устройств описаны в /2/. Такие устройства имеют низкую точность из-за влияния сопротивления дуги в месте короткого замыкания и нелинейной зависимости сопротивления рельсов от расстояния из-за шунтирующего влияния земли. Кроме того, на двухпутных участках между величиной Z и расстоянием до места повреждения нет прямой зависимости из-за индуктивного влияния тока контактной сети смежного пути. По этим причинам ошибка в определении расстояния до места короткого замыкания по величине Z может достичь 4 км и более, что лишает смысла применение устройства.
а блок регистрации фиксирует результат деления Z, по значению которого судят об удаленности места короткого замыкания. Конструкции подобных устройств описаны в /2/. Такие устройства имеют низкую точность из-за влияния сопротивления дуги в месте короткого замыкания и нелинейной зависимости сопротивления рельсов от расстояния из-за шунтирующего влияния земли. Кроме того, на двухпутных участках между величиной Z и расстоянием до места повреждения нет прямой зависимости из-за индуктивного влияния тока контактной сети смежного пути. По этим причинам ошибка в определении расстояния до места короткого замыкания по величине Z может достичь 4 км и более, что лишает смысла применение устройства.
Известно устройство для определения места короткого замыкания в контактной сети железных дорог переменного тока /3/. Оно содержит датчик тока, датчик напряжения, фазочувствительный преобразователь, блок деления и блок регистрации. При коротком замыкании датчик тока фиксирует ток I'1, датчик напряжения фиксирует напряжение UA сети, фазочувствительный преобразователь формирует величину UAsinϕ1, где ϕ1 - фазовый угол между током и напряжением, блок деления осуществляет операцию  а блок регистрации фиксирует результат деления X, по значению которого судят об удаленности короткого замыкания. Такое устройство более точно, чем предыдущее, поскольку при одностороннем питании контактной сети сопротивление электрической дуги, имеющее практически только активную составляющую, не вносит погрешность в результат деления X. Однако, при двухстороннем питании контактной сети, которое является основным, электрическая дуга влияет на результат деления X. Кроме того, на этот результат влияет нелинейная зависимость сопротивления рельсов от удаленности короткого замыкания и индуктивное влияние тока контактной сети смежного пути. По этим причинам ошибка в определении расстояния до места короткого замыкания по величине Х при двухстороннем питании может достичь 2 км и более, что так же является недопустимо большим.
а блок регистрации фиксирует результат деления X, по значению которого судят об удаленности короткого замыкания. Такое устройство более точно, чем предыдущее, поскольку при одностороннем питании контактной сети сопротивление электрической дуги, имеющее практически только активную составляющую, не вносит погрешность в результат деления X. Однако, при двухстороннем питании контактной сети, которое является основным, электрическая дуга влияет на результат деления X. Кроме того, на этот результат влияет нелинейная зависимость сопротивления рельсов от удаленности короткого замыкания и индуктивное влияние тока контактной сети смежного пути. По этим причинам ошибка в определении расстояния до места короткого замыкания по величине Х при двухстороннем питании может достичь 2 км и более, что так же является недопустимо большим.
Известен указатель места короткого замыкания контактной сети /8/. На смежных тяговых подстанциях устанавливаются датчики тока lA, lB и напряжения UA, UВ. Имеются блок регистрации, датчики фазовых углов ϕA,ϕB, задатчики сопротивлений подстанций ХпA, ХпB, погонных сопротивлений контактной сети Zc и рельсового пути Zp, а также расстояния между подстанциями 1, программируемые многофункциональные преобразователи для вычисления коэффициентов νA,νB, учитывающих шунтирующее влияние земли, четыре программируемых многофункциональных преобразователя и шесть функциональных преобразователей.
Первый программируемый многофункциональный преобразователь реализует вычислительный алгоритм в виде выражения:
второй программируемый многофункциональный преобразователь реализует вычислительный алгоритм сходного вида для определения параметра ψB.
Третий программируемый многофункциональный преобразователь реализует на первом входе вычислительный алгоритм в виде выражения:
а на втором выходе - в виде выражения:
Четвертый программируемый многофункциональный преобразователь формирует выходной сигнал, реализуя вычислительный алгоритм в виде выражения:
Первый и четвертый функциональные преобразователи реализуют известные вычислительные алгоритмы для определения коэффициентов νA и νB. Второй и пятый функциональные преобразователи реализуют соответственно вычислительные алгоритмы для определения параметров ZтcA и ZтсВ: ,
, .
.
Третий и шестой функциональные преобразователи реализуют соответственно вычислительные алгоритмы в виде выражений:
Недостатками известного устройства /8/ являются:
использование в вычислительных алгоритмах значения токов плеч питания IA и IB;
необходимость получения информации о параметрах аварийного режима от смежной подстанции;
неприспособленность к изменению схемы питания межподстанционной зоны.
Первый недостаток связан с тем, что как известно, в токе плеч питания имеется не только необходимая составляющая, обусловленная коротким замыканием контактной сети, но и составляющие, обусловленные нагрузкой собственных нужд подстанций и нагрузкой питаемых от этих подстанций линий электроснабжения нетяговых потребителей ДПР (два провода - рельсы). Последние две составляющих, не имеющие отношения к короткому замыканию контактной сети, вносят погрешность в вычисление удаленности lK короткого замыкания.
Второй недостаток обуславливает сложность устройства, поскольку известная система телемеханики /9/ не осуществляет передачу измерительной информации между смежными подстанциями. Такая информация от каждой подстанции передается только в энергодиспетчерский пункт. Организация обмена измерительной информации между подстанциями технически вообще говоря осуществима, но требует применения дополнительных средств телемеханики, что делает устройство сложным. В настоящее время такой обмен измерительной информации между подстанциями отсутствует. В обозримом будущем применение таких дополнительных средств по указанным причинам так же не планируется.
Третий недостаток связан с возможностью изменения схемы питания при помощи выключателей QA1....QB2 (фиг.1,а). При возникновении короткого замыкания в точке К контактная сеть отключается выключателями QA1 и QПA 1 на ее обоих концах. После этого срабатывает устройство автоматического повторного включения (АПВ), которое включает выключатель QA1 контактной сети только на одном ее конце. Если повреждение является устойчивым, то этот выключатель снова отключается. Измерение удаленности короткого замыкания для получения надежного результата должно осуществляться как до АПВ, так и после него. Однако схема питания контактной сети до АПВ и после него оказывается разной: до АПВ схема питания двухсторонняя, а после АПВ - односторонняя. Аналогичное положение имеет место, если контактная сеть смежного пути оперативно отключена выключателями QA2 и/или QПA2, например для ремонта. Во всех этих случаях схема питания контактной сети разная, в то время как указатель /8/ настроен задатчиками удельных параметров контактной сети только на одну схему питания. Поэтому при изменении схемы питания указатель /8/ будет выдавать неточные или неверные результаты.
Указанные недостатки приводят к снижению точности определения удаленности lK до места повреждения и усложнению устройства.
Техническим результатом изобретения является повышение точности определения удаленности повреждения и упрощение устройства.
Повышение точности обеспечивается использованием других вычислительных алгоритмов и учете реальной схемы питания межподстанционной зоны, а также использованием информации не о токе плеча питания, а о токе фидера поврежденной контактной сети. Упрощение обеспечивается тем, что параметры аварийного режима измеряются только на одной подстанции, а не на двух.
Технический результат достигается тем, что указатель удаленности короткого замыкания контактной сети переменного тока, содержащий установленные на первой подстанции датчик тока I'1 контролируемого фидера контактной сети, датчик напряжения UA, датчик фазового угла ϕ1, задатчик погонного индуктивно развязанного сопротивления Zc,1 контактной сети одного пути, задатчик погонного индуктивно развязанного сопротивления Zp рельсовой цепи, задатчик расстояния l между смежными подстанциями, задатчик сопротивлений ZпA, ZпB соответственно первой и второй подстанций, первый и второй программируемые функциональные преобразователи, первый, второй, третий и четвертый программируемые многофункциональные преобразователи и блок регистрации, при этом выход датчика тока I'1 присоединен к первому входу датчика фазового угла ϕ1, ко второму входу которого присоединен выход датчика напряжения UА, дополнительно снабжен задатчиком погонного индуктивно развязанного сопротивления ZВС взаимоиндукции между контактными сетями разных путей, задатчиком расстояния l1 между подстанцией и постом секционирования, первым и вторым умножителями, логическим блоком выбора схемы питания, коммутатором и блоками схем питания по числу учитываемых схем питания контактной сети в зоне между первой и второй подстанциями, включающими каждый первый, второй, третий и четвертый программируемые многофункциональные преобразователи, причем выход датчика погонного индуктивно развязанного сопротивления рельсовой цепи Zp подключен к первым входам первого и второго умножителей, ко второму входу первого умножителя подключен выход первого программируемого функционального преобразователя, а ко второму входу второго умножителя подключен выход второго программируемого функционального преобразователя, первый вход которого подключен к выходу задатчика расстояния l1 между первой подстанцией и постом секционирования, а второй вход к выходу задатчика расстояния 1 между первой и второй подстанциями, выходы задатчика погонного индуктивно развязанного сопротивления Zc,1 контактной сети одного пути, задатчика индуктивно развязанного сопротивления zвc взаимоиндукции, первого и второго умножителей, а также задатчиков сопротивлений ZпA, ZпВ соответственно первой и второй подстанций и задатчика расстояния l между первой и второй подстанциями подключены соответственно к первому, второму, третьему, четвертому, пятому, шестому и седьмому входам первого программируемого многофункционального преобразователя в каждом из блоков схем питания, первый и второй выходы которого в каждом блоке схем питания подключены соответственно к первому и второму входам второго программируемого многофункционального преобразователя, к третьему входу которого подключен выход задатчика расстояния l1 между первой подстанцией и постом секционирования, а первый и второй выходы присоединены соответственно к четвертому и пятому входам третьего программируемого многофункционального преобразователя, к первому входу которого подключен выход задатчика погонного сопротивления zc,1 контактной сети, ко второму входу - выход задатчика погонного сопротивления zвc взаимоиндукции, к третьему входу - выход первого умножителя, а первый и второй выходы присоединены соответственно к четвертому и пятому входам четвертого программируемого многофункционального преобразователя, к первому входу которого подключен выход датчика тока I'1, ко второму входу - выход датчика фазового угла ϕ1, к третьему входу выход датчиа напряжения UA, к шестому и седьмому входам - соответственно первый и второй выходы второго программируемого многофункционального преобразователя, к восьмому входу - второй выход первого программируемого многофункционального преобразователя, выход каждого из которых всех блоков схем питания подключен к соответствующему входу коммутатора, к управляющему входу которого подключен логический блок выбора схемы питания, а к выходу - блок регистрации, вход первого программируемого функционального преобразователя, третий вход второго программируемого функционального преобразователя, а также восьмой вход первого и четвертый вход второго программируемых многофункциональных преобразователей, в каждом из блоков схем питания, при этом первый программируемый многофункциональный преобразователь на первом выходе формирует выходной сигнал D, реализуя вычислительный алгоритм в виде выражения:
а на втором выходе формирует выходной сигнал δ, реализуя вычислительный алгоритм в виде выражения:
второй программируемый многофункциональный преобразователь на первом выходе формирует выходной сигнал N, реализуя вычислительный алгоритм в виде выражения:
а на втором выходе формирует выходной сигнал αN, реализуя вычислительный алгоритм в виде выражения:
третий программируемый многофункциональный преобразователь на первом выходе формирует выходной сигнал zэ, реализуя вычислительный алгоритм в виде выражения:
а на втором выходе формирует выходной сигнал αэ, реализуя вычислительный алгоритм в виде выражения:
четвертый программируемый многофункциональный преобразователь на выходе формирует выходной сигнал lK, реализуя вычислительный алгоритм в виде выражения:
где UA - измеренное напряжение на шинах первой подстанции;
I'1 - измеренный ток фидера контактной сети;
ϕ1 - измеренный фазовый угол между током I'1 и напряжением UA; - заданные комплексные сопротивления соответственно первой и второй подстанций;
- заданные комплексные сопротивления соответственно первой и второй подстанций; - заданное погонное индуктивно развязанное сопротивление контактной сети одного пути;
- заданное погонное индуктивно развязанное сопротивление контактной сети одного пути; - заданное погонное индуктивно развязанное комплексное сопротивление взаимоиндукции между контактными сетями разных путей;
- заданное погонное индуктивно развязанное комплексное сопротивление взаимоиндукции между контактными сетями разных путей; - заданное погонное индуктивно развязанное сопротивление рельсовой цепи;
- заданное погонное индуктивно развязанное сопротивление рельсовой цепи; - комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от первой и второй подстанций до точки короткого замыкания, вычисляемые при каждом коротком замыкании и данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
- комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от первой и второй подстанций до точки короткого замыкания, вычисляемые при каждом коротком замыкании и данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
νA,νB - вычисляемые по известным формулам коэффициенты, учитывающие снижение сопротивления рельсовой цепи на участках соответственно от первой подстанции до точки короткого замыкания и от точки короткого замыкания до второй подстанции за счет шунтирующего влияния земли;
n - число путей, по контактной сети которых протекает ток, зависящее от схемы питания;
l - заданное расстояние между первой и второй смежными подстанциями;
l1 - заданное расстояние от первой подстанции до поста секционирования;
lК - заданное расстояние от первой подстанции до места короткого замыкания.
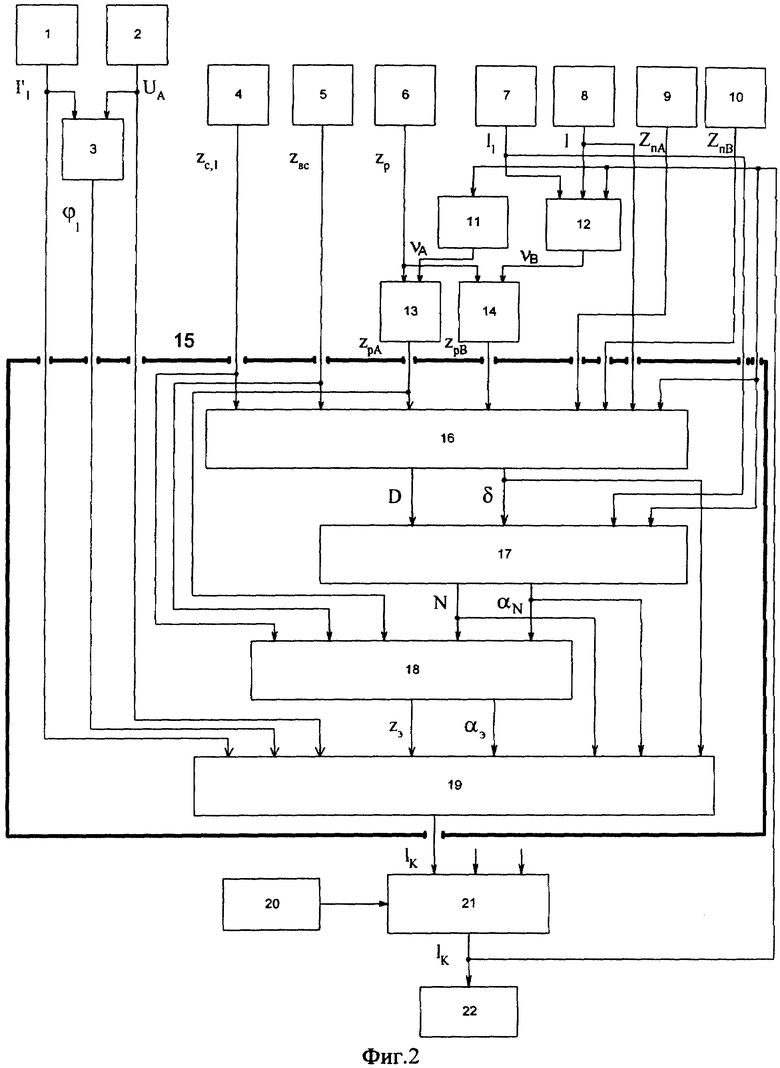
Сущность изобретения поясняется схемами, приведенными на фиг.1 и 2. На фиг.2 изображена структурная схема устройства, соответствующая формуле изобретения. Схема питания и ее схема замещения, показанные на фиг.1, служат для обоснования работоспособности и заявленной цели изобретения.
Структурная схема устройства (фиг.2) содержит установленные на первой подстанции:
1 - датчик тока I'1 контролируемого фидера контактной сети;
2 - датчик напряжения Ua на шинах подстанции;
3 - датчик фазового угла ϕ1 между током I'1 и напряжением UA;
4 - задатчик погонного индуктивно развязанного сопротивления zc,1 контактной сети одного пути;
5 - задатчик погонного индуктивно развязанного сопротивления zвс взаимоиндукции между контактными сетями разных путей;
6 - задатчик погонного индуктивно развязанного сопротивления zp рельсовой цепи;
7 - задатчик расстояния l1 между первой подстанцией и постом секционирования (фиг.1);
8 - задатчик расстояния 1 между первой и второй смежными подстанциями (l=l1+l2);
9, 10 - задатчик сопротивлений ZпA и ZпB соответственно первой и второй смежных подстанций;
11, 12 - соответственно первый и второй программируемые функциональные преобразователи для вычисления коэффициентов νA и νB;
13, 14 - соответственно первый и второй умножители;
15 - блок схемы питания;
16, 17, 18, 19 - соответственно первый, второй, третий, четвертый программируемые многофункциональные преобразователи;
20 - логический блок выбора схемы питания;
21 - коммутатор;
22 - блок регистрации.
Элементы 1, 2, 3, 4, 6, 8, 9, 10, 11, 12, 16, 17, 18, 19, 22 используются в прототипе /8/. Остальные элементы 5, 13, 14, 15, 20, 21 и связи между ними являются новыми. Все элементы устанавливаются на первой подстанции. Возможна установка элементов 20, 21, 22 на энергодиспетчерском пункте, при этом связь между элементом 19 и 21 осуществляется с помощью известных устройств телемеханики /9/.
Элементы 16, 17, 18 и 19 являются составной частью блока 15. В устройстве используется столько одинаковых блоков 15, сколько схем питания контактной сети может иметь место на участке между смежными первой и второй подстанциями. Все блоки 15 имеют одинаковую структуру и набор элементов и одинаковым образом соединяются с другими элементами, не входящими в блоки 15.
Выходы датчиков тока 1, фазового угла 3 и напряжения 2 подключены соответственно к первому, второму и третьему входам четвертого программируемого многофункционального преобразователя 19 в каждом из блоков 15. Выходы датчиков тока 1 и напряжения 2 кроме того подключены соответственно к первому и второму входам датчика фазового угла 3. Выходы задатчиков сопротивления контактной сети 4 и сопротивления взаимоиндукции 5 подключены соответственно к первому и второму входам первого 16 и третьего 18 программируемых многофункциональных преобразователей в каждом из блоков 15. Выход задатчика сопротивления рельсовой цепи 6 подключен к первым входам соответственно первого 13 и второго 14 умножителей, выходы которых подключены соответственно к третьему и четвертому входам первого программируемого многофункционального преобразователя 16 в каждом из блоков 15. Выход первого умножителя 13 кроме того подключен к третьему входу третьего программируемого многофункционального преобразователя 18 в каждом из блоков 15. Выходы задатчиков расстояний 7 и 8 подключены соответственно к первому и второму входам программируемого функционального преобразователя 12. Выход задатчика расстояния 7 кроме того подключен к третьему входу второго программируемого многофункционального преобразователя 17, а выход задатчика 8 - к седьмому входу первого программируемого многофункционального преобразователя 16 в каждом из блоков 15. Выходы задатчиков сопротивления первой подстанции 9 и сопротивления второй подстанции 10 подключены соответственно к пятому и шестому входам первого программируемого многофункционального преобразователя 16 в каждом из блоков 15.
Первый выход первого программируемого многофункционального преобразователя 16 подключен к первому входу второго программируемого многофункционального преобразователя 17, второй выход первого программируемого многофункционального преобразователя 16 подключен ко второму входу второго 17 и восьмому входу четвертого 19 программируемых многофункциональных преобразователей. Первый и второй выходы второго программируемого многофункционального преобразователя 17 подключены соответственно к четвертому и пятому входам третьего 18, а также шестому и седьмому входам четвертого 19 программируемых многофункциональных преобразователей. Первый и второй выходы третьего программируемого многофункционального преобразователя 18 подключены соответственно к четвертому и пятому входам четвертого программируемого многофункционального преобразователя 19.
Выход четвертого программируемого многофункционального преобразователя 19 каждого из блоков 15 подключен к соответствующему входу коммутатора 21, управляющий вход которого соединен с выходом логического блока выбора схемы питания 20. Выход коммутатора 21 соединен с блоком регистрации 22, а также (в качестве обратной связи) со входом первого программируемого функционального преобразователя 11, с третьим входом второго программируемого функционального преобразователя 12, с восьмым входом первого программируемого многофункционального преобразователя 16 (в каждом из блоков 15) и с четвертым входом второго программируемого многофункционального преобразователя 17 (в каждом из блоков 15).
Датчик тока 1 фиксирует значение тока I'1 фидера контактной сети на первой подстанции. Датчик напряжения 2 фиксирует напряжение UA на шинах той же подстанции. Датчик фазового угла фиксирует значение фазового угла ϕ1 между током I'1 и напряжением UA.
В задатчиках 4, 5 и 6 устанавливается уровень выходного сигнала, пропорциональный соответственно значениям погонного индуктивно развязанного сопротивления контактной сети zc,1, погонного индуктивно развязанного сопротивления zВС взаимоиндукции между контактными сетями разных путей и погонного индуктивно развязанного сопротивления zp рельсовой цепи многопутного участка. В задатчиках 7 и 8 устанавливается уровень выходного сигнала, пропорциональный соответственно расстоянию l1 от первой подстанции до поста секционирования и расстоянию 1 между первой и второй смежными подстанциями. В задатчиках 9 и 10 устанавливается уровень выходного сигнала, пропорциональный сопротивлениям ZпA и ZпB соответственно первой и второй подстанций.
Первый программируемый функциональный преобразователь 11 как и в прототипе формирует зависимость между удаленностью lK короткого замыкания и коэффициентом νA, учитывающим снижение сопротивления рельсов из-за шунтирующего влияния земли на участке от первой подстанции до точки короткого замыкания. На основании /5/ такой программируемый функциональный преобразователь может реализовывать алгоритм (или нелинейную зависимость от расстояния L) вида:
где m - известная величина, зависящая от сопротивления контура рельсы - земля и высоты подвешивания контактной сети;
γ - известный коэффициент распространения рельсового пути.
При L=lK получают ν = νA, при L=l1+l2-lк=l-lк получают ν = νB,
где l2 - заданное расстояние от второй подстанции до поста секционирования.
Второй программируемый функциональный преобразователь 12 формирует зависимость между удаленностью lK короткого замыкания и коэффициентом νB, учитывающим снижение сопротивления рельсов из-за шунтирующего влияния земли на участке от точки короткого замыкания К до второй подстанции В. Его выходной сигнал получен на основе реализации вычислительного алгоритма (8) при L= l-lK. На выходе умножителей 13 и 14 выходные сигналы получают в виде выражений соответственно  и
и  .
.
Первый программируемый многофункциональный преобразователь 16 имеет два выхода. На первом из них выходной сигнал D является результатом реализации вычислительного алгоритма в виде математического выражения:
а на втором выходе выходной сигнал δ является результатом вычислительного алгоритма в виде математического выражения:
где ZтcA, ZтcВ - результирующие сопротивления ветвей схемы замещения тяговой сети, имеющие известную зависимость от схемы питания, погонного сопротивления контактной сети и рельсов, от расстояний lK, l1 и l в соответствии с формулами, указанными в приведенной выше таблице и в /6, 7/.
Первый программируемый многофункциональный преобразователь в каждом из блоков 15 реализует вычисление значений ZтсА и ZтсВ только для одной из числа возможных схем питания, но при условии, что в разных блоках 15 реализуются вычисления для разных схем питания.
Второй программируемый многофункциональный преобразователь 17 имеет два выхода. На первом из них выходной сигнал N является результатом реализации вычислительного алгоритма в виде математического выражения:
а на втором выходе выходной сигнал αN является результатом вычислительного алгоритма в виде математического выражения:
где n - число путей, по контактной сети которых на участке от первой подстанции до поста секционирования протекает ток, зависящее от схемы питания.
В каждом из блоков 15 второй программируемый многофункциональный преобразователь реализует вычислительные алгоритмы для той же схемы питания, что и первый программируемый многофункциональный преобразователь.
Третий программируемый многофункциональный преобразователь 18 имеет два выхода. На первом из них выходной сигнал zэ является результатом реализации вычислительного алгоритма в виде математического выражения:
а на втором выходе выходной сигнал αэ является результатом вычислительного алгоритма в виде математического выражения:
Третий программируемый многофункциональный преобразователь в каждом из блоков 15 реализует вычислительные алгоритмы для той же схемы питания, что первый и второй программируемые многофункциональные преобразователи.
Четвертый программируемый многофункциональный преобразователь 19 реализует вычислительный алгоритм в виде математического выражения:
Величина lК характеризует удаленность (расстояние) от первой подстанции до места короткого замыкания для заданного для каждого из блоков 15 варианта учитываемых схем питания.
Схема питания контактной сети в зоне между первой и второй подстанциями зависит от того, какие именно выключатели в этой зоне находятся во включенном или отключенном состояниях.
Информация о включенных и отключенных выключателях по существующей системе телемеханики /9/ поступает в логический блок 20, который управляет коммутатором 21. При заданном положении выключателей (т.е. при заданной схеме питания) логический блок 20 выдает определенную команду, в соответствии с которой коммутатор подключается к тому из блоков 15, который соответствует заданной схеме питания. Поэтому на выходе коммутатора 21 появляется то значение сигнала lК, которое соответствует имеющейся при коротком замыкании схеме питания. Этот сигнал фиксируется в блоке регистрации 22.
Величина lК определяет значение коэффициентов νA,νB, а также значение сигналов D,δ,N и αN. Для того, чтобы блок регистрации 22 фиксировал истинное значение удаленности lК с учетом действительных значений νA,νB,D,δ,N,αN, соответствующих именно этой величине удаленности, элементы 11, 12, 16 и 17 включены в цепь обратной связи коммутатора 21.
Датчики тока 1 и напряжения 2 выполняются известным образом на основе, например, измерительных трансформаторов соответственно тока ТА и напряжения TV (см. фиг.1,а).
Датчик фазового угла 3 выполняется (как и в прототипе) известным образом на основе цифровых или аналоговых фазометров. Остальные элементы структурной схемы выполняются как и в прототипе на основе компонентов цифровой или аналоге цифровой техники.
В задатчиках 4, 5, 6, 7, 8, 9 и 10 хранится информация о постоянных параметрах тяговой сети и подстанций zc,1, zвс, zp, l1, l, ZпA, ZпВ. Они выполняются, как и в прототипе, известным образом в виде, например, потенциометров или источников опорного напряжения, а также в виде шифраторов цифровой техники. В логическом блоке 20 хранится информация о состоянии выключателей QA1, QA2, QПА1, QПA2, QПB1, QПB2, QB1, QB2 (см. фиг.1,а) в зоне между первой и второй смежными подстанциями (включен или отключен), т.е. о схеме питания контактной сети. Такая информация является не измерительной, а логической дискретной, и она поступает в логический блок из энергодиспетчерского пункта по известной системе телемеханики /9/.
При возникновении в контактной сети короткого замыкания датчик тока 1, датчик напряжения 2 и датчик фазового угла 3 фиксируют на первой подстанции параметры аварийного режима соответственно: ток фидера поврежденной контактной сети I'1, напряжение на шинах подстанции UA и фазовый угол между этими величинами ϕ1. Сигналы, несущие информацию о постоянных параметрах тяговой сети, параметрах аварийного режима и схеме питания контактной сети, поступают на соответствующие входы функциональных преобразователей и в программируемые многофункциональные преобразователи блоков устройства, которые по заданным алгоритмам (1) - (7) и (8) определяют удаленность короткого замыкания lк.
Обоснование алгоритмов и технического результата
Обоснование работоспособности и точности изобретения основано на известной индуктивно развязанной схеме замещения тяговой сети электрифицированной железной дороги /5, 6/ и ее параметрах /6, 7/, а также на использовании известных законов электротехники и расчетных формул для указанной схемы замещения /5, 6, 7/. На фиг.1,а приведена для примера схема питания двухпутного участка от подстанций А и В, имеющая пост секционирования ПС. Расстояние между подстанциями l=l1+l2. Короткое замыкание находится в точке К на расстоянии lК от первой подстанции А. Схема питания при всех включенных выключателях QA1. . . QB2 носит название узловой. Отключение тех или иных выключателей изменяет схему питания и результирующие сопротивления схемы замещения тяговой сети.
Приведенной схеме питания соответствует индуктивно развязанная схема замещения, показанная на фиг. 1, б /5, 6, 7/. На схеме замещения приняты обозначения:
UA,xx, UB,xx - напряжения холостого хода соответственно подстанций А и В;
UA, UB - напряжения на шинах соответственно подстанций А и В;
IA, IB - токи плеч питания соответственно подстанций А и В, относящиеся к одной фазе (одной межподстанционной зоне);
I'1 - ток фидера поврежденной (контролируемой) контактной сети одного пути на участке lк;
I''1 - ток поврежденной контактной сети того же пути на участке l1-lK;
I1q - суммарный ток фидеров неповрежденной контактной сети других путей на участке l1 от подстанции А до поста секционирования ПС;
IK - ток в месте короткого замыкания К;
Z'1, Z''2 - индуктивно развязанные сопротивления поврежденной контактной сети одного пути на участках соответственно lК и l1-lК;
Z1q - индуктивно развязанное сопротивление неповрежденной контактной сети других путей на участке l1;
Z'BC,1, Z''BC,1 - индуктивно развязанные сопротивления взаимосвязи, учитывающие взаимную индуктивную связь контактной сети разных путей соответственно на участках lК и l1-lК;
Z2 - результирующее индуктивно развязанное сопротивление контактной сети всех путей на участке I2;
ZпA, ZпB - сопротивления соответственно подстанций А и В;
ZpA, ZpB - индуктивно развязанные сопротивления рельсовой цепи на длине соответственно lК и l1+l2-lК=l-lk;
RД - сопротивление электрической дуги или переходное в месте короткого замыкания.
В соответствии с/5,6,7/ имеем:



где Zc,1- погонное индуктивно развязанное сопротивление контактной сети одного пути на длине 1 км;
ZBC - погонное индуктивно развязанное сопротивление взаимосвязи на длине 1 км, учитывающее взаимную индуктивную связь контактной сети фазных путей, зависящее от числа путей с контактной сетью;
Zp- погонное индуктивно развязанное сопротивление рельсов всех путей на длине 1 км;
n - число электрифицированных путей, по контактной сети которых протекает ток короткого замыкания.
Схема замещения, показанная на фиг.1,б, в общем случае может быть отнесена к многопутному участку, с числом путей более двух /5, 6, 7/, например m-путному участку. Над рельсовыми путями подвешивается контактная сеть, причем над каждым путем - своя контактная сеть, изолированная от контактной сети других путей. Рельсовые пути обозначаются номерами: первый путь, второй путь, . . ., m-й путь. Соответственно контактные сети разных путей называют: контактная сеть первого пути, контактная сеть второго пути и т.д. При этом число путей, оборудованных контактной сетью, может не совпадать с общим числом рельсовых путей данного участка железной дороги. Некоторые рельсовые пути могут быть неэлектрифицированными, т.е. не имеющими своей контактной сети. В общем случае число путей с контактной сетью обозначим n. Формулы (9) относятся к общему случаю, когда m-путный участок железной дороги имеет n электрифицированных путей.
Каждый из выключателей на подстанциях А и В (QA1, QA2, QB1, QB2) оборудуется своим указателем удаленности короткого замыкания. Обоснование работоспособности указателя выполнено при условии, что он установлен на выключателе QA1 подстанции А. Обоснование для указателей на других выключателях аналогично.
На основании 2-го закона Кирхгофа для приведенной на фиг.1,б схемы замещения имеем:
Подставляя сюда выражения (9) и решая полученное уравнение относительно lК, получаем:
Выражение (11) однозначно определяет удаленность lК от параметров аварийного режима. В то же время непосредственное использование этой формулы невозможно, поскольку данное устройство не получает информации о величине токов IA и IК и их фазовых углов, а также о сопротивлении дуги RД в месте повреждения.
Для схемы, приведенной на фиг.1,6, на основании /6, 7/ имеем:
На основании 1-го закона Кирхгофа и с учетом (12) получаем:
Формулы для вычисления токов IA и IB приведены в /6, 7/. На их основании следует, что при равенстве напряжений холостого хода подстанций А и В (UA,xx= UB,xx) имеет место соотношение  где ZA и ZB - результирующие сопротивления индуктивно развязанной схемы замещения тяговой сети. В свою очередь эти сопротивления равны
где ZA и ZB - результирующие сопротивления индуктивно развязанной схемы замещения тяговой сети. В свою очередь эти сопротивления равны  где ZтcA, ZтcB - результирующие сопротивления ветвей индуктивно развязанной схемы замещения (фиг.1,б) за вычетом сопротивления трансформаторов. Значения сопротивлений подстанций ZпA и ZпB заданы задатчиками 9 и 10.
где ZтcA, ZтcB - результирующие сопротивления ветвей индуктивно развязанной схемы замещения (фиг.1,б) за вычетом сопротивления трансформаторов. Значения сопротивлений подстанций ZпA и ZпB заданы задатчиками 9 и 10.
Формулы для вычисления значений ZтcA и ZтcB для разных схем питания известны и имеются в приведенной выше таблице и в /6, 7/.
Учитывая указанное соотношение между токами Ia, Ib и результирующими сопротивлениями Za, Zb индуктивно развязанной схемы замещения, получаем вместо (13):

где D, δ - модуль и аргумент комплексной величины 
N,αN - модуль и аргумент комплексной величины 
Вычисление модулей и аргументов (фазовых углов) комплексных величин осуществляется известными в математике методами.
Фазовые углы напряжения UA и всех токов будем отсчитывать от одной оси, в качестве которой принимаем направление вектора напряжения холостого хода UA,xx, т.е.:
где UA - модуль напряжения на шинах подстанции А;
IA, I'1, IК - модули соответствующих комплексных значений токов;
ψ - фазовый угол напряжения UA относительно вектора 
ϕA - фазовый угол между векторами напряжения  и тока
и тока 
ϕ1 - фазовый угол между векторами напряжения  и тока
и тока 
ψK - фазовый угол между векторами напряжения  и тока
и тока  .
.
Учитывая выражения (17), запишем формулу (14) в виде:
из которой следует:
Подставив выражение (14) в (11), получим:
где zэ определяется формулой:
в которой

что совпадает соответственно с формулами (6) и (7).
Используя выражения (17) и (20), получим вместо (19):
Используя формулу Эйлера, получим вместо (21) выражение, записанное в тригонометрической форме:
Поскольку расстояние lК по определению вещественно, т.е. не имеет мнимой части, то слагаемое выражения (22) с множителем j равно нулю.
Следовательно:
При вещественном lК из (22) следует так же:
UAsin(ϕA-αэ)-IKRДsin(ψA+ϕA-αэ-ψK) = 0.
Отсюда находим:
Подставив выражение (24) в (23), получаем после тригонометрических преобразований:
Ток  в месте короткого замыкания равен сумме токов
в месте короткого замыкания равен сумме токов  поэтому можно записать с учетом выражений (16) и (17):
поэтому можно записать с учетом выражений (16) и (17):
Из этого выражения следует:
ψK = ψA+ϕA-δ. (26)
Подставив выражения (18) и (26) в (25) получаем окончательно:
что соответствует формуле (7).
Таким образом доказана возможность осуществления изобретения. Достигаемый технический результат (преимущества по сравнению с прототипом) заключается в следующем:
отсутствует необходимость во втором датчике тока на первой подстанции, измеряющем суммарный ток плеча питания;
отсутствует необходимость получения (по каналам телеизмерений) информации о параметрах аварийного режима, измеряемых на второй (смежной) подстанции;
обеспечивается правильное измерение удаленности короткого замыкания при изменении схемы питания контактной сети.
Этим обеспечивается упрощение устройства и повышение точности определения удаленности короткого замыкания lК.
Источники информации
1. А.С. СССР 161410, кл. G 01 r; 21 e, 29/10; В 61 m; 20 k, 20. Устройство для определения места короткого замыкания в контактной сети железных дорог переменного тока./ Фигурнов Е. П., Самсонов Ю. Я. (СССР) N 787278/24-7; Заявл. 16.07.62. Опубл. 19.03.64. Бюл. N 7.
2. Фигурнов Е. П. Защита электротяговых сетей переменного тока от коротких замыканий. M.: Транспорт, 1979.
3. А.С. СССР 158328, кл. Н 02 D; 21 C, 68/50. Устройство для определения места короткого замыкания в контактной сети. / Фигурнов Е. П. (СССР) -N 798020/24-7; Заявл. 8.10.62. Опубл. 19.10.63. Бюл. N 21.4.
4. Патент RU 2160193, кл. 7 В 60 М 1/00. Указатель удаленности короткого замыкания в тяговой сети переменного тока./ Быкадоров А. Л., Жарков Ю. И., Петров П. И., Фигурнов Е. П. (RU). N 98110434/28; Заявл. 01.06.1998. Опубл. 10.12.2000. Бюл. N 34.
5. Фигурнов Е. П. Сопротивления электротяговой сети однофазного переменного тока. Электричество, 1997, N 5, с.23-29.
6. Фигурнов Е.П., Петрова Т.Е. Релейная защита систем электроснабжения. Расчеты защит от коротких замыканий и перегрузки. Ч.2. Тяговые сети переменного тока напряжением 27,5 кВ. Учебное пособие для вузов ж.-д. трансп. Рост. гос. ун-т путей сообщения. Ростов н/Д, 1998. с. 90.
7. Руководящие материалы по релейной защите систем тягового электроснабжения. Министерство путей сообщения Российской Федерации. -М.: Транспорт, 1999. с.96.
8. Патент RU 2153426, кл. 7 В 60 М 1/00. Указатель места короткого замыкания контактной сети./ Фигурнов Е. П., Петров И. П., Жарков Ю. И., Быкадоров А. Л. (RU) N 98110435/28; Заявл. 01.06.1998. Опубл. 27.07.2000. Бюл. N 21.
9. Система телемеханики "Лисна" для электрифицированных железных дорог./ Бакеев Е. Е., Корсаков Г. М., Овласюк В. Я., Сухопрудский Н. Д. Под ред. Сухопрудского Н. Д. М.: Транспорт, 1979. с.215.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛИТЕЛЬ УДАЛЕННОСТИ ПОВРЕЖДЕНИЯ КОНТАКТНОЙ СЕТИ (ВАРИАНТЫ) | 2001 |
|
RU2189607C1 |
| УКАЗАТЕЛЬ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2153426C2 |
| УКАЗАТЕЛЬ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ В ТЯГОВОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2160193C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УДАЛЕННОСТИ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ В ТЯГОВОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННОГО ТРАНСПОРТА (ВАРИАНТЫ) | 1998 |
|
RU2181672C2 |
| ОПРЕДЕЛИТЕЛЬ МЕСТА ПОВРЕЖДЕНИЯ ТЯГОВОЙ СЕТИ | 1998 |
|
RU2177417C2 |
| ОПРЕДЕЛИТЕЛЬ МЕСТА ПОВРЕЖДЕНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2160673C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ В КОНТАКТНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА МНОГОПУТНОГО УЧАСТКА (ВАРИАНТЫ) | 2020 |
|
RU2747112C1 |
| Способ определения удаленности короткого замыкания контактной сети электрического транспорта (варианты) | 2015 |
|
RU2619625C2 |
| Способ определения расстояния до места короткого замыкания контактной сети переменного тока (варианты) | 2015 |
|
RU2629734C2 |
| Способ определения удаленности короткого замыкания контактной сети (варианты) | 2015 |
|
RU2610826C1 |
Использование: в системах электроснабжения тяги для определения удаленности короткого замыкания в контактной сети переменного тока. Технический результат заключается в упрощении и повышении точности определения расстояния до места короткого замыкания. Способ основан на использовании параметров аварийного режима путем измерения напряжения на шинах подстанции, тока фидера поврежденной контактной сети и фазового угла между ними. Задаются начальным значением расстояния до места короткого замыкания и методом последовательных приближений определяют удаленность повреждения в результате систематического вычисления для данной схемы питания межподстанционной зоны коэффициентов, учитывающих снижение сопротивления рельсовой цепи из-за шунтирующего влияния земли, и функций, учитывающих параметры тяговых подстанций, контактной сети и рельсов в зависимости от схемы питания межподстанционной зоны. В устройстве на подстанции установлены датчик тока и датчик напряжения. Имеются блок регистрации, датчик фазового угла, задатчики погонных сопротивлений контактной сети, взаимоиндукции между контактными сетями разных путей, рельсовой цепи, сопротивлений смежных подстанций, расстояний между подстанцией и постом секционирования, между смежными подстанциями, два программируемых функциональных преобразователя, два умножителя, блоки схем питания контактной сети по числу учитываемых схем питания, каждый из которых содержит по четыре программируемых многофункциональных преобразователя, а так же логический блок выбора схемы питания и коммутатор. Четвертый программируемый многофункциональный преобразователь выполнен с возможностью формирования выходного сигнала, пропорционального расстоянию от подстанции до точки короткого замыкания. 2 с.п.ф-лы, 2 ил., 1 табл.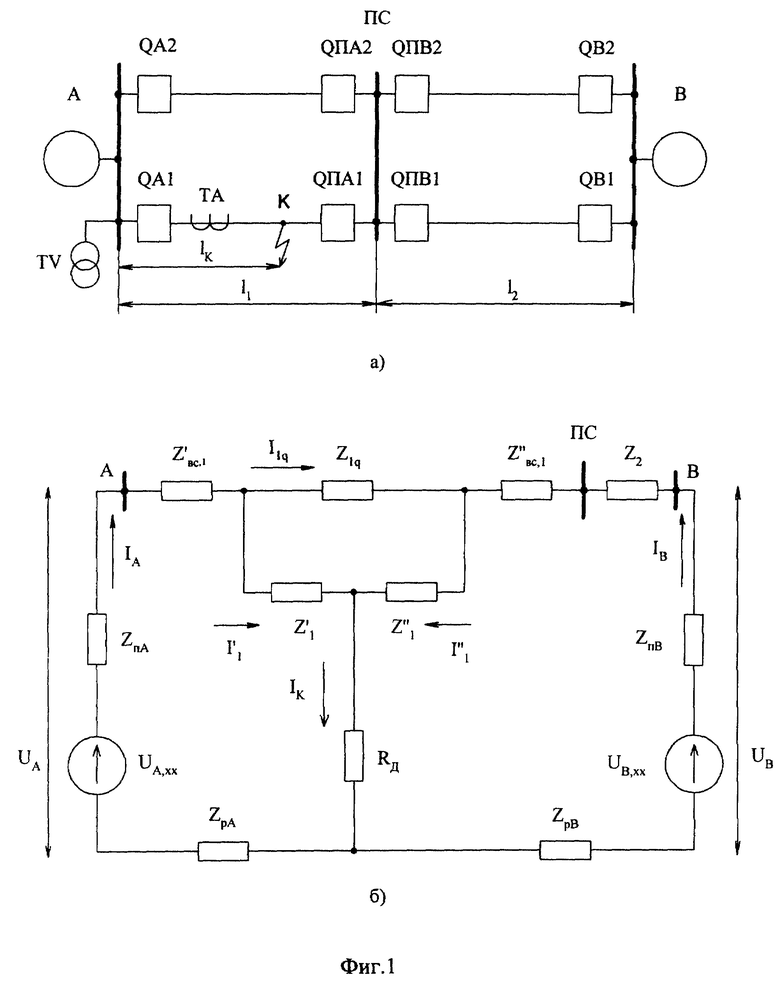



где  - заданные комплексные сопротивления смежных подстанций А и В;
- заданные комплексные сопротивления смежных подстанций А и В; - комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от подстанции А и от подстанции В до точки короткого замыкания, вычисляемые при данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
- комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от подстанции А и от подстанции В до точки короткого замыкания, вычисляемые при данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
l1 - заданное расстояние от подстанции А до поста секционирования;
n - число путей, по контактной сети которых на участке от подстанции А до поста секционирования протекает ток, зависящее от схемы питания; - заданное индуктивно развязанное комплексное сопротивление 1 км контактной сети одного пути;
- заданное индуктивно развязанное комплексное сопротивление 1 км контактной сети одного пути; - заданное индуктивно развязанное комплексное сопротивление 1 км рельсовой цепи всех путей;
- заданное индуктивно развязанное комплексное сопротивление 1 км рельсовой цепи всех путей; - заданное индуктивно развязанное комплексное сопротивление 1 км, учитывающее взаимную индуктивную связь контактных сетей разных путей и равное нулю на однопутном участке или при отключенной контактной сети смежных путей на многопутном участке.
- заданное индуктивно развязанное комплексное сопротивление 1 км, учитывающее взаимную индуктивную связь контактных сетей разных путей и равное нулю на однопутном участке или при отключенной контактной сети смежных путей на многопутном участке.
а на втором выходе формирует выходной сигнал δ, реализуя вычислительный алгоритм в виде выражения
второй программируемый многофункциональный преобразователь на первом выходе формирует выходной сигнал N, реализуя вычислительный алгоритм в виде выражения:
а на втором выходе формирует выходной сигнал αN, реализуя вычислительный алгоритм в виде выражения
третий программируемый многофункциональный преобразователь на первом выходе формирует выходной сигнал Zэ, реализуя алгоритм в виде выражения
а на втором выходе формирует выходной сигнал αэ, реализуя вычислительный алгоритм в виде выражения
четвертый программируемый многофункциональный преобразователь на выходе формирует выходной сигнал lК, реализуя вычислительный алгоритм в виде выражения
где UА - измеренное напряжение на шинах первой подстанции;
I'1 - измеренный ток фидера контактной сети;
ϕ1/ - измеренный фазовый угол между током I'1 и напряжением UА; - заданные комплексные сопротивления соответственно первой и второй подстанций;
- заданные комплексные сопротивления соответственно первой и второй подстанций; - заданное погонное индуктивно развязанное комплексное сопротивление контактной сети одного пути;
- заданное погонное индуктивно развязанное комплексное сопротивление контактной сети одного пути; - заданное погонное индуктивно развязанное комплексное сопротивление взаимоиндукции между контактными сетями разных путей;
- заданное погонное индуктивно развязанное комплексное сопротивление взаимоиндукции между контактными сетями разных путей; - заданное погонное индуктивное развязанное комплексное сопротивление рельсовой цепи;
- заданное погонное индуктивное развязанное комплексное сопротивление рельсовой цепи;
ZтсА, ZтсВ - комплексные сопротивления результирующей схемы замещения контактной сети на участках соответственно от первой и второй подстанций до точки короткого замыкания, вычисляемые при данной схеме питания по формулам, указанным, например, в приведенной в описании таблице;
νA, νB - коэффициенты, учитывающие снижение сопротивления рельсовой цепи на участках соответственно от первой и от второй подстанций до точки короткого замыкания за счет шунтирующего влияния земли, вычисляемые по известным формулам;
n - число путей, по контактной сети которых протекает ток, зависящее от схемы питания;
l - расстояние между первой и второй смежными подстанциями;
l1 - расстояние от первой подстанции до поста секционирования;
lК - расстояние от первой подстанции до места короткого замыкания.
| УКАЗАТЕЛЬ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ В ТЯГОВОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2160193C2 |
| УКАЗАТЕЛЬ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2153426C2 |
| 0 |
|
SU161410A1 | |
| SU 849110 А, 23.07.1981 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯДО Л1ЕСТА ПОВРЕЖДЕНИЯ НА ОТКЛЮЧЕННОЙЛИНИИ РАСПРЕДЕЛИТЕЛЬНОЙ СЕТИ12 | 1971 |
|
SU432430A1 |
| ОПРЕДЕЛИТЕЛЬ МЕСТА ПОВРЕЖДЕНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2160673C2 |
| US 3593124 А, 20.03.1968 | |||
| DE 3829955, 30.03.1989. | |||
