Изобретение относится к электрифицированному на переменном токе транспорту и может использоваться в системах электроснабжения тяги для определения места короткого замыкания.
В первом варианте на смежных тяговых подстанциях установлены датчики тока и напряжения. Имеются блок регистрации, датчики фазового угла, сумматоры, преобразователи фазового угла, функциональный и пять многофункциональных преобразователей. Пятый многофункциональный преобразователь выполнен с возможностью формирования выходного сигнала, характеризующего расстояние от одной подстанции до точки короткого замыкания, реализуя соответствующий вычислительный алгоритм, в зависимости от токов и фазовых углов первой и второй подстанций, сигналов, формируемых преобразователями фазового угла, первым, вторым, третьим и четвертым многофункциональными преобразователями. В цепь обратной связи между пятым и первым, а также вторым многофункциональными преобразователями включен функциональный преобразователь, учитывающий шунтирующее влияние земли. Технический результат заключается в повышении точности определения расстояния до места короткого замыкания.
Во втором варианте установлены датчики тока и напряжения. Имеются два блока регистрации, датчики фазового угла, сумматоры, преобразователи фазового угла, функциональный и шесть многофункциональных преобразователей. Пятый многофункциональный преобразователь выполнен с возможностью формирования выходного сигнала, характеризующего расстояние от одной из подстанций до точки короткого замыкания, а шестой многофункциональный преобразователь выполнен с возможностью формирования выходного сигнала, характеризующего сопротивление места короткого замыкания, реализуя соответствующий вычислительный алгоритм в зависимости от токов, напряжений и фазовых углов первой и второй подстанций, сигналов, формируемых преобразователями фазового угла, первым, вторым, третьим и четвертым многофункциональными преобразователями. Технический результат заключается в повышении точности определения расстояния до места короткого замыкания и в оценке характера этого повреждения.
1-й вариант
Изобретение относится к электрифицированному на переменном токе транспорту и может быть использовано в системах электроснабжения тяги для определения места короткого замыкания контактной сети.
Известно устройство для определения места короткого замыкания в контактной сети железных дорог переменного тока [1]. Оно содержит датчик тока, датчик напряжения, блок деления и блок регистрации. При коротком замыкании датчик тока фиксирует ток I, датчик напряжения фиксирует напряжение U, блок деления осуществляет операцию Z=U/I, а блок регистрации фиксирует результат деления Z, по величине которого судят об удаленности места короткого замыкания.
Другие конструкции подобных устройств и принципы их работы, основанные на определении той же величины Z, описаны в [2]. Всем им присущи одинаковые недостатки, вытекающие из того, что на самом деле между величиной Z и расстоянием до места повреждения во многих случаях нет прямой зависимости. Особенно большую погрешность вносит сопротивление электрической дуги в месте короткого замыкания. По этой причине ошибка в определении расстояния до места короткого замыкания по величине Z может достичь 4 км и более, что лишает смысла применение устройства.
Более точные результаты могут быть получены при одновременных двухсторонних измерениях параметров аварийного режима со стороны двух смежных подстанций А и В. Известно устройство [3] определения места повреждения, содержащее датчик суммарного тока IA фидеров данного плеча питания и датчик напряжения UA на первой подстанции А, датчик суммарного тока IB фидеров того же плеча питания и датчик напряжения UB на второй подстанции В, а также блоки суммирования, деления и регистрации. Устройство на подстанциях фиксирует величины ZA=UA/IA и ZB=UB/IB. Затем оно вычисляет величину ZA/(ZA+ZB) или ZB/(ZA+ZB), которые фиксируются в блоке регистрации. На основании этих величин судят об удаленности места повреждения на контактной сети. Устройство [3] принято в качестве прототипа.
Свойства устройства описаны в [4]. На основании его анализа [4] следует, что зависимости ZA/(ZA+ZB) и ZB/(ZA+ZB) на некоторых участках нелинейно зависят от расстояния до места повреждения. Из-за этого, а также из-за влияния электрической дуги в месте короткого замыкания, погрешность устройства может достичь 2 км и более [5].
Техническим результатом изобретения является повышение точности определения расстояния до места короткого замыкания в контактной сети.
Технический результат достигается тем, что устройство для определения удаленности места короткого замыкания в тяговой сети электрифицированного транспорта, содержащее датчик тока IA, измеряющий суммарный ток фидеров контактной сети данного плеча питания, и датчик напряжения UA на первой подстанции, датчик тока IB, измеряющий суммарный ток фидеров контактной сети того же плеча питания, и датчик напряжения UB на второй подстанции, а также первый сумматор и блок регистрации, дополнительно снабжено датчиком тока I'1 фидера поврежденной контактной сети, датчиками фазовых углов соответственно ϕ1 и ϕA, первым многофункциональным преобразователем фазового угла и вторым сумматором на первой подстанции, датчиком фазового угла ϕB, вторым многофункциональным преобразователем фазового угла и третьим сумматором на второй подстанции, а также первым, вторым, третьим, четвертым и пятым многофункциональными преобразователями и функциональным преобразователем, причем выход датчика тока I'1 присоединен к первому входу датчика фазового угла ϕ1, второму входу первого и третьему входу второго многофункциональных преобразователей, выход датчика тока IA присоединен к первому входу датчика фазового угла ϕA, к первому входу первого многофункционального преобразователя фазового угла, четвертому входу первого, пятому входу второго, первому входу третьего и второму входу четвертого многофункциональных преобразователей, выход датчика напряжения UA присоединен ко вторым входам соответственно датчика фазового угла ϕ1, датчика фазового угла ϕA и первого многофункционального преобразователя фазового угла, и к третьему входу пятого многофункционального преобразователя, выход датчика тока IB присоединен к первым входам соответственно датчиков фазового угла ϕB и второго многофункционального преобразователя фазового угла, к третьему входу третьего и четвертому входу четвертого многофункциональных преобразователей, выход датчика напряжения UB присоединен ко вторым входам соответственно датчика фазового угла ϕB и второго многофункционального преобразователя фазового угла, выход датчика фазового угла ϕ1 присоединен к первому входу первого сумматора, второй вход которого подключен к выходу первого многофункционального преобразователя фазового угла, а выход - к третьему входу первого и четвертому входу второго многофункциональных преобразователей, выход датчика фазового угла ϕA присоединен к первому входу второго сумматора, второй вход которого подключен к выходу первого многофункционального преобразователя фазового угла и четвертому входу пятого многофункционального преобразователя, а выход присоединен к пятому входу первого, шестому входу второго, второму входу третьего и третьему входу четвертого многофункциональных преобразователей, выход датчика фазового угла ϕB присоединен к первому входу третьего сумматора, второй вход которого подключен к выходу второго многофункционального преобразователя фазового угла, а выход - к четвертому входу третьего и пятому входу четвертого многофункциональных преобразователей, выход первого многофункционального преобразователя присоединен к первым входам соответственно второго и пятого многофункциональных преобразователей, выход второго многофункционального преобразователя подключен ко второму входу пятого многофункционального преобразователя, к шестому входу которого подключены выход третьего и первый вход четвертого, а к пятому входу - выход четвертого многофункциональных преобразователей, а выход присоединен к блоку регистрации и через функциональный преобразователь - к первому входу первого и второму входу второго многофункциональных преобразователей, при этом первый многофункциональный преобразователь фазового угла формирует выходной сигнал ψA, реализуя вычислительный алгоритм в виде выражения
второй многофункциональный преобразователь фазового угла формирует выходной сигнал ψB, реализуя вычислительный алгоритм в виде выражения
первый сумматор формирует выходной сигнал α1, реализуя вычислительный алгоритм в виде выражения α1 = ϕ1+ψA, второй сумматор формирует выходной сигнал αA, реализуя вычислительный алгоритм в виде выражения αA = ϕA+ψA, третий сумматор формирует выходной сигнал αB, реализуя вычислительный алгоритм в виде выражения αB = ϕB+ψB, первый многофункциональный преобразователь формирует выходной сигнал М, реализуя вычислительный алгоритм в виде выражения
второй многофункциональный преобразователь формирует выходной сигнал  реализуя вычислительный алгоритм в виде выражения
реализуя вычислительный алгоритм в виде выражения
третий многофункциональный преобразователь формирует выходной сигнал Iк, реализуя вычислительный алгоритм в виде выражения
четвертый многофункциональный преобразователь формирует выходной сигнал αк, реализуя вычислительный алгоритм в виде выражения
пятый многофункциональный преобразователь формирует выходной сигнал lк, реализуя вычислительный алгоритм в виде выражения
где zвс, xвс - полное индуктивно развязанное сопротивление взаимной индуктивной связи контактных сетей смежных путей и его индуктивная составляющая на длине 1 км;
zс - полное индуктивно развязанное сопротивление контактной сети одного пути на длине 1 км;
zр, rp, xp - полное индуктивно развязанное сопротивление рельсовой цепи и его активная и индуктивная составляющие на длине 1 км;
ZпА, ZпВ - сопротивления соответственно первой и второй подстанций; фазовый угол (аргумент) полного сопротивления zс-zвс;
фазовый угол (аргумент) полного сопротивления zс-zвс;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли;
lк - выходной сигнал, характеризующий расстояние от первой подстанции до места короткого замыкания.
Сущность изобретения поясняется схемами и векторной диаграммой, приведенными на фиг. 1, фиг. 3, фиг. 4. На фиг. 1 изображена структурная схема устройства, соответствующая п. 1 формулы изобретения. Схема питания и ее схема замещения, показанные на фиг. 3, а также векторная диаграмма, изображенная на фиг. 4, служат для доказательства (обоснования) работоспособности и заявленной цели изобретения.
Структурная схема устройства (фиг. 1) содержит:
1 - датчик тока I'1 фидера поврежденной контактной сети, установленный на первой подстанции (UA1);
2 - датчик, измеряющий суммарный ток IA всех фидеров данного плеча питания на первой подстанции (UA2);
3 - датчик напряжения UA на первой подстанции (UV1);
4 - датчик, измеряющий суммарный ток IB всех фидеров того же плеча питания на второй подстанции (UA3);
5 - датчик напряжения UB на второй подстанции (UV2);
6 - датчик фазового угла ϕ1 тока I'1 на первой подстанции (Uϕ1);
7 - датчик фазового угла ϕA тока IA на первой подстанции (Uϕ2);
8 - датчик фазового угла ϕB тока IB второй подстанции (Uϕ3);
9, 10 - соответственно первый (UCψ1) и второй (UCψ2) многофункциональные преобразователи фазового угла;
11, 12, 13 - соответственно первый (SМ1), второй (SM2) и третий (SM3) сумматоры;
14, 15, 16, 17, 18 - соответственно первый (UC1), второй (UС2), третий (UС3), четвертый (UС4) и пятый (UC5) многофункциональные преобразователи;
19 - функциональный преобразователь (UС);
20 - первый блок регистрации (HS1).
Элементы 2, 3, 4, 5 и 20 используются в прототипе [3]. Остальные элементы и связи между ними являются новыми.
Элементы 1, 2, 3, 6 и 7 устанавливаются на первой подстанции. Элементы 4, 5 и 8 устанавливаются на второй подстанции.
Остальные элементы структурной схемы могут устанавливаться как на любой из подстанций, так и на энергодиспетчерском пункте. Передача сигналов от датчиков 1, 2, 3, 4, 5, 6, 7 и 8 к остальным элементам схемы (при размещении датчиков и остальных элементов на разных территориально удаленных объектах) осуществляется обычным (известным) образом с помощью систем телемеханики (телеизмерений), например, [6]. Поскольку такая передача сигналов является известной, то в заявке или схеме фиг. 1 она специально не выделяется и не ограничивается.
Выход датчика тока 1 присоединен к первому входу датчика фазного угла 6, второму входу первого 14 и третьему входу второго 15 многофункциональных преобразователей. Выход датчика тока 2 присоединен к первому входу датчика фазового угла 7, первому входу многофункционального преобразователя фазового угла 9, четвертому входу первого 14, пятому входу второго 15, первому входу третьего 16 и второму входу четвертого 17 многофункциональных преобразователей. Выход датчика напряжения 3 присоединен ко вторым входам датчиков фазового угла 6 и 7 и к третьему входу пятого многофункционального преобразователя 18.
Выход датчика фазового угла 6 присоединен к первому входу сумматора 11, выход датчика фазового угла 7 присоединен к первому входу сумматора 12, а вторые входы сумматоров 11 и 12 подключены к выходу многофункционального преобразователя фазового угла 9, к которому подключен также четвертый вход пятого многофункционального преобразователя 18. Выход сумматора 11 подключен к третьему входу первого 14 и четвертому входу второго 15, а выход сумматора 12 подключен к пятому входу первого 14, шестому входу второго 15, второму входу третьего 16 и третьему входу четвертого 17 многофункциональных преобразователей.
Выход датчика тока 4 присоединен к первому входу датчика фазового угла 8, к первому входу многофункционального преобразователя фазового угла 10, к четвертому входу третьего 16 и пятому входу четвертого 17 многофункциональных преобразователей. Выход датчика фазы 8 присоединен к первому входу сумматора 13, ко второму входу которого подключен выход многофункционального преобразователя фазы 10. Выход сумматора 13 присоединен к четвертому входу третьего 16 и пятому входу четвертого 17 многофункциональных преобразователей.
Выход первого многофункционального преобразователя 14 присоединен к первому входу второго многофункционального преобразователя 15 и к первому входу пятого многофункционального преобразователя 18, ко второму входу которого подключен выход второго 15, к пятому входу подключен выход четвертого 17, а к шестому входу подключен выход третьего 16 многофункциональных преобразователей.
Выход пятого многофункционального преобразователя 18 подключен к блоку регистрации 20 и через функциональный преобразователь 19 - к первому входу первого 14 и второму входу второго 15 многофункциональных преобразователей.
Датчики тока 2 и 4 фиксируют соответственно на первой и второй подстанциях суммарные токи IA и IB фидеров контактной сети данного плеча питания. Датчик тока 1 фиксирует ток I'1 поврежденной контактной сети на первой подстанции. Датчики напряжений 3 и 5 фиксируют напряжения UA и UB соответственно на первой и второй подстанциях. Датчики фазовых углов 6, 7 и 8 фиксируют фазовые углы ϕ1, ϕA, и ϕB соответственно между напряжением UA и током I'1, а также напряжением UA и током IA первой подстанции и напряжением UB и током IB второй подстанции.
Первый многофункциональный преобразователь фазового угла 9 формирует на выходе сигнал ψA, реализуя вычислительный алгоритм в виде выражения
где ZпА - сопротивление первой подстанции.
Второй многофункциональный преобразователь фазового угла 10 формирует выходной сигнал ψB, реализуя вычислительный алгоритм в виде выражения
где ZпВ - сопротивление второй подстанции.
Сумматоры 11, 12, и 13 формируют на выходе соответственно сигналы α1, αA, αB, реализуя вычислительные алгоритмы в виде выражений
α1 = ϕ1+ψA, (3)
αA = ϕA+ψA, (4)
Первый многофункциональный преобразователь 14 формирует выходной сигнал М, реализуя вычислительный алгоритм в виде выражения
где zc, xc - известное полное индуктивно развязанное сопротивление контактной сети одного пути и его индуктивная составляющая на длине 1 км;
zвс, xвс - известное полное индуктивно развязанное сопротивление взаимной индуктивной связи контактных сетей смежных путей и его индуктивная составляющая на длине 1 км;
zp, rp, xр - известное полное индуктивно развязанное сопротивление рельсовой цепи и его активная и индуктивная составляющие на длине 1 км; известный фазовый угол (аргумент) полного сопротивления zc-zвс;
известный фазовый угол (аргумент) полного сопротивления zc-zвс;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли.
Второй многофункциональный преобразователь 15 формирует выходной сигнал αM, реализуя вычислительный алгоритм в виде выражения
Третий многофункциональный преобразователь 16 формирует выходной сигнал Iк, реализуя вычислительный алгоритм в виде выражения
Четвертый многофункциональный преобразователь формирует выходной сигнал αк, реализуя вычислительный алгоритм в виде выражения
Пятый многофункциональный преобразователь 18 формирует выходной сигнал lк, реализуя вычислительный алгоритм в виде выражения
Функциональный преобразователь 19 формирует зависимость между удаленностью lк короткого замыкания и коэффициентом ν,, учитывающим шунтирующее влияние земли (утечку тока из рельсов в землю) на участке от первой подстанции до места короткого замыкания. На основании [7] такой функциональный преобразователь может реализовывать вычислительный алгоритм (или нелинейную зависимость) в виде выражения
где m - известная величина, зависящая от значения сопротивления контура рельсы-земля и высоты подвеса контактной сети;
γ - известный коэффициент распространения рельсовой цепи.
Для того, чтобы блок регистрации 18 фиксировал значение удаленности lк с учетом действительного значения коэффициента ν, соответствующего именно этой величине удаленности, функциональный преобразователь 19 включен в цепь обратной связи первого 14 и второго 15 многофункциональных преобразователей.
Датчики тока 1, 2 и 4 выполняются известным образом на основе, например, измерительных трансформаторов тока. Датчики напряжения 3 и 5 выполняются известным образом на основе, например, измерительных трансформаторов напряжения. Датчики фазового угла 6, 7 и 8 выполняются известным образом на основе цифровых или аналоговых фазометров [8].
Функциональный и многофункциональные преобразователи 9, 10, 14, 15, 16, 17, 18 и 19 могут быть выполнены с применением аналоговых [9] или цифровых микросхем и микропроцессорных комплектов [10].
При возникновении в контактной сети короткого замыкания датчики тока 1, 2 и 4, датчики напряжения 3 и 5, датчики фазового угла 6, 7 и 8 фиксируют на первой и второй подстанциях параметры аварийного режима соответственно I'1, IA, IB, UA, UB, ϕ1, ϕA, ϕB. Сигналы, несущие информацию о постоянных параметрах подстанций, параметрах тяговой сети и параметрах аварийного режима, поступают на соответствующие входы сумматоров, многофункциональных и функционального преобразователей, которые по заданным алгоритмам (1)-(11) определяют удаленность короткого замыкания lк.
Достигаемый технический результат (преимущества по сравнению с прототипом) заключается в следующем:
- однозначная и прямая зависимость искомого расстояния lк от параметров аварийного режима и постоянных параметров тяговой сети;
- отсутствие влияния сопротивления дуги на результаты определения расстояния lк;
- отсутствие влияния утечки тока из рельсов в землю (шунтирующее влияние земли) на результаты определения lк.
Расчеты показывают, что основная погрешность определения расстояния lк с помощью данного изобретения вызвана тем, что напряжения UA,xx и UB,xx могут в реальных условиях не совпадать по фазе. Однако, как известно, угол между ними невелик и не превышает 2-3 градуса. Погрешность определения удаленности lк при этом составляет не более 200-400 м, т.е. по крайней мере в 5-10 раз, меньше чем у прототипа.
2-й вариант
Изобретение относится к электрифицированному на переменном токе транспорту и может быть использовано в системах электроснабжения тяги для определения удаленности и сопротивления дуги (переходного сопротивления) в месте короткого замыкания.
Известно устройство для определения места короткого замыкания в контактной сети железных дорог переменного тока [1]. Оно содержит датчик тока, датчик напряжения, блок деления и блок регистрации. При коротком замыкании датчик тока фиксирует ток I, датчик напряжения фиксирует напряжение U, блок деления осуществляет операцию Z=U/I, а блок регистрации фиксирует результат деления Z, по величине которого судят об удаленности места короткого замыкания.
Другие конструкции подобных устройств и принципы их работы, основанные на определении той же величины Z, описаны в [2]. Всем им присущи одинаковые недостатки, вытекающие из того, что на самом деле между величиной Z и расстоянием до места повреждения во многих случаях нет прямой зависимости. Особенно большую погрешность вносит сопротивление электрической дуги в месте короткого замыкания. По этой причине ошибка в определении расстояния до места короткого замыкания по величине Z может достичь 4 км и более, что лишает смысла применение устройства.
Более точные результаты могут быть получены при одновременных двухсторонних измерениях параметров аварийного режима со стороны двух смежных подстанций А и В. Известно устройство [3] определения места повреждения, содержащее датчик суммарного тока IA фидеров данного плеча питания и датчик напряжения UA на первой подстанции А, датчик суммарного тока IB фидеров того же плеча питания и датчик напряжения UB на второй подстанции В, а также блоки суммирования, деления и регистрации. Устройство на подстанциях фиксирует величины ZA=UA/IA и ZB=UB/IB. Затем оно вычисляет величину ZA/(ZA+ZB) или ZB/(ZA+ZB), которые фиксируются в блоке регистрации.
На основании этих величин судят об удаленности места повреждения на контактной сети. Устройство [3] принято в качестве прототипа.
Свойства устройства описаны в [4]. На основании его анализа [4] следует, что зависимости ZA/(ZA+ZB) и ZB/(ZA+ZB) на некоторых участках нелинейно зависят от расстояния до места повреждения. Из-за этого, а также из-за влияния электрической дуги в месте короткого замыкания, погрешность устройства может достичь 2 км и более [5].
Ни один из аналогов не может определить сопротивление электрической дуги (переходное сопротивление) в месте короткого замыкания, что позволило бы прогнозировать характер повреждения.
Техническим результатом изобретения является повышение точности определения расстояния до места короткого замыкания и определение сопротивления дуги (переходного сопротивления) в месте повреждения на контактной сети.
Технический результат достигается тем, что устройство для определения удаленности места короткого замыкания в тяговой сети электрифицированного транспорта, содержащее датчик тока IA, измеряющий суммарный ток фидеров контактной сети данного плеча питания и датчик напряжения UA на первой подстанции, датчик тока IB, измеряющий суммарный ток фидеров контактной сети того же плеча питания и датчик напряжения UB на второй подстанции, а также первый сумматор и блок регистрации, дополнительно снабжено датчиком тока I'1фидера поврежденной контактной сети, датчиками фазовых углов соответственно ϕ1 и ϕA, первым многофункциональным преобразователем фазового угла и вторым сумматором на первой подстанции, датчиком фазового угла ϕB, вторым многофункциональным преобразователем фазового угла и третьим сумматором на второй подстанции, а также первым, вторым, третьим, четвертым, пятым и шестым многофункциональными преобразователями, функциональным преобразователем, и вторым блоком регистрации, причем выход датчика тока I'1присоединен к первому входу датчика фазового угла ϕ1, второму входу первого и третьему входу второго многофункциональных преобразователей, выход датчика тока IA присоединен к первому входу датчика фазового угла ϕA, к первому входу первого многофункционального преобразователя фазового угла, четвертому входу первого, пятому входу второго, первому входу третьего и второму входу четвертого многофункциональных преобразователей, выход датчика напряжения UA присоединен ко вторым входам соответственно датчика фазового угла ϕ1 датчика фазового угла ϕA и первого многофункционального преобразователя фазового угла, и к третьему входу пятого многофункционального преобразователя, выход датчика тока IB присоединен к первым входам соответственно датчика фазового угла ϕB и второго многофункционального преобразователя фазового угла, к третьему входу третьего и четвертому входу четвертого многофункциональных преобразователей, выход датчика напряжения UB присоединен ко вторым входам
соответственно датчика фазового угла ϕB и второго многофункционального преобразователя фазового угла, выход датчика фазового угла ϕ1 присоединен к первому входу первого сумматора, второй вход которого подключен к выходу первого многофункционального преобразователя фазового угла, а выход к третьему входу первого и четвертому входу второго многофункциональных преобразователей, выход датчика фазового угла ϕA присоединен к первому входу второго сумматора, второй вход которого подключен к выходу первого многофункционального преобразователя фазового угла и четвертому входу пятого многофункционального преобразователя, а выход присоединен к пятому входу первого, шестому входу второго, второму входу третьего и третьему входу четвертого многофункциональных преобразователей, выход датчика фазового угла ϕB присоединен к первому входу третьего сумматора, второй вход которого подключен к выходу второго многофункционального преобразователя фазового угла, а выход - к четвертому входу третьего и пятому входу четвертого многофункциональных преобразователей, выход первого многофункционального преобразователя присоединен к первым входам соответственно второго и пятого многофункциональных преобразователей, выход второго многофункционального преобразователя подключен ко второму входу пятого многофункционального преобразователя, к шестому входу которого подключены выход третьего и первый вход четвертого, а к пятому входу - выход четвертого многофункциональных преобразователей, а выход присоединен к первому блоку регистрации и через функциональный преобразователь - к первому входу первого и второму входу второго многофункциональных преобразователей, причем первый вход упомянутого многофункционального преобразователя подключен к выходу второго многофункционального преобразователя, второй вход подключен к выходу первого многофункционального преобразователя фазового угла, третий вход подключен к выходу датчика напряжения UA, четвертый вход подключен к выходу третьего, а пятый вход - к выходу четвертого многофункциональных преобразователей, а его выход присоединен к седьмому входу пятого многофункционального преобразователя и ко входу второго блока регистрации, при этом многофункциональный преобразователь фазового угла формирует выходной сигнал ψA, реализуя вычислительный алгоритм в виде выражения
второй многофункциональный преобразователь фазового угла формирует выходной сигнал ψB, реализуя вычислительный алгоритм в виде выражения
первый сумматор формирует выходной сигнал α1, реализуя вычислительный алгоритм в виде выражения α1 = ϕ1+ψA, второй сумматор формирует выходной сигнал αA, реализуя вычислительный алгоритм в виде выражения αA = ϕA+ψA, третий сумматор формирует выходной сигнал αB, реализуя вычислительный алгоритм в виде выражения αB = ϕB+ψB, первый многофункциональный преобразователь формирует выходной сигнал М, реализуя вычислительный алгоритм в виде выражения
второй многофункциональный преобразователь формирует выходной сигнал αM, реализуя вычислительный алгоритм в виде выражения
третий многофункциональный преобразователь формирует выходной сигнал Iк, реализуя вычислительный алгоритм в виде выражения
четвертый многофункциональный преобразователь формирует выходной сигнал αк, реализуя вычислительный алгоритм в виде выражения
пятый многофункциональный преобразователь формирует выходной сигнал lк, характеризующий расстояние от первой подстанции до места короткого замыкания, реализуя вычислительный алгоритм в виде выражения
где Rд - сигнал, формируемый на выходе шестого многофункционального преобразователя и соответствующий сопротивлению места короткого замыкания, полученный путем реализации указанным преобразователем вычислительного алгоритма в виде выражения
zвс, xвс - полное индуктивно развязанное сопротивление взаимной индуктивной связи контактных сетей смежных путей и его индуктивная составляющая на длине 1 км;
zс - полное индуктивно развязанное сопротивление контактной сети одного пути на длине 1 км;
zр, rp, xр - полное индуктивно развязанное сопротивление рельсовой цепи и его активная и индуктивная составляющие на длине 1 км;
ZпA, ZпВ - сопротивления соответственно первой и второй подстанций; фазовый угол (аргумент) полного сопротивления zc-zвс;
фазовый угол (аргумент) полного сопротивления zc-zвс;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли;
lк - выходной сигнал, характеризующий расстояние от первой подстанции до места короткого замыкания.
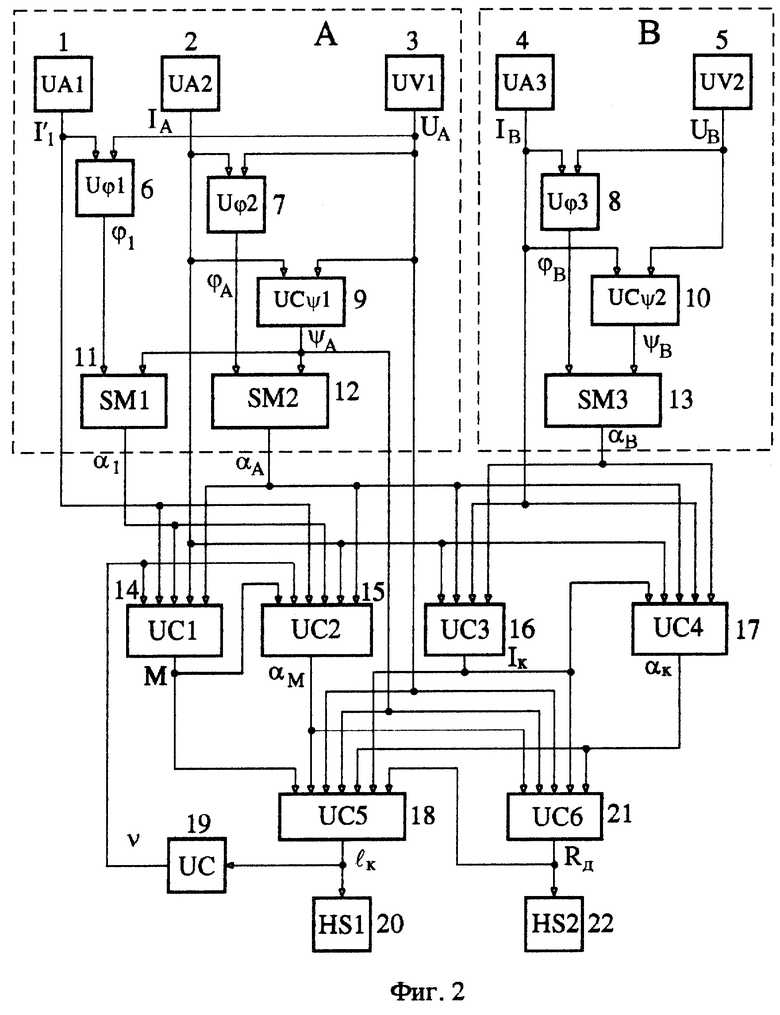
Сущность изобретения поясняется схемами и векторной диаграммой, приведенными на фиг. 2, фиг. 3, фиг. 4. На фиг. 2 изображена структурная схема устройства, соответствующая п. 2 формулы изобретения. Схема питания и ее схема замещения, показанные на фиг. 3, а также векторная диаграмма, изображенная на фиг. 4, служат для доказательства (обоснования) работоспособности и заявленной цели изобретения.
Структурная схема устройства (фиг. 2) содержит:
1 - датчик тока I'1 фидера поврежденной контактной сети, установленный на первой подстанции (UA1);
2 - датчик, измеряющий суммарный ток IA всех фидеров данного плеча питания на первой подстанции (UA2);
3 - датчик напряжения UA на первой подстанции (UV1);
4 - датчик, измеряющий суммарный ток IB всех фидеров того же плеча питания на второй подстанции (UA3);
5 - датчик напряжения UB на второй подстанции (UV2);
6 - датчик фазового угла ϕ1 тока I'1 на первой подстанции (Uϕ1);
7 - датчик фазового угла ϕA тока IA на первой подстанции (Uϕ2);
8 - датчик фазового угла ϕB тока IB на второй подстанции (Uϕ3);
9, 10 - соответственно первый (UCψ1) и второй (UCψ2) многофункциональные преобразователи фазового угла;
11, 12, 13 - соответственно первый (SM1), второй (SM2) и третий (SM3) сумматоры;
14, 15, 16, 17, 18 - соответственно первый (UС1), второй (UС2), третий (UС3), четвертый (UС4) и пятый (UС5) многофункциональные преобразователи;
19 - функциональный преобразователь (UС);
20 - первый блок регистрации (HS1);
21 - шестой многофункциональный преобразователь (UС6);
22 - второй блок регистрации (HS2).
Выход датчика тока 1 присоединен к первому входу датчика фазного угла 6, второму входу первого 14 и третьему входу второго 15 многофункциональных преобразователей. Выход датчика тока 2 присоединен к первому входу датчика фазового угла 7, первому входу многофункционального преобразователя фазового угла 9, четвертому входу первого 14, пятому входу второго 15, первому входу третьего 16 и второму входу четвертого 17 многофункциональных преобразователей. Выход датчика напряжения 3 присоединен ко вторым входам датчиков фазового угла 6 и 7 и к третьему входу пятого многофункционального преобразователя 18.
Выход датчика фазового угла 6 присоединен к первому входу сумматора 11, выход датчика фазового угла 7 присоединен к первому входу сумматора 12, а вторые входы сумматоров 11 и 12 подключены к выходу многофункционального преобразователя фазового угла 9, к которому подключен также четвертый вход пятого многофункционального преобразователя 18. Выход сумматора 11 подключен к третьему входу первого 14 и четвертому входу второго 15, а выход сумматора 12 подключен к пятому входу первого 14, шестому входу второго 15, второму входу третьего 16 и третьему входу четвертого 17 многофункциональных преобразователей.
Выход датчика тока 4 присоединен к первому входу датчика фазового угла 8, к первому входу многофункционального преобразователя фазового угла 10, к четвертому входу третьего 16 и пятому входу четвертого 17 многофункциональных преобразователей. Выход датчика фазы 8 присоединен к первому входу сумматора 13, ко второму входу которого подключен выход многофункционального преобразователя фазы 10. Выход сумматора 13 присоединен к четвертому входу третьего 16 и пятому входу четвертого 17 многофункциональных преобразователей.
Выход первого многофункционального преобразователя 14 присоединен к первому входу второго многофункционального преобразователя 15 и к первому входу пятого многофункционального преобразователя 18, ко второму входу которого подключен выход второго 15, к пятому входу подключен выход четвертого 17, а к шестому входу подключен выход третьего 16 многофункциональных преобразователей.
Выход пятого многофункционального преобразователя 18 подключен к блоку регистрации 20 и через функциональный преобразователь 19 - к первому входу первого 14 и второму входу второго 15 многофункциональных преобразователей.
Первый вход шестого многофункционального преобразователя 21 подключен к выходу второго многофункционального преобразователя 15. Второй вход шестого многофункционального преобразователя 21 присоединен к выходу первого многофункционального преобразователя фазового угла 9. Третий вход шестого многофункционального преобразователя 21 подключен к выходу датчика напряжения 3. Четвертый вход шестого многофункционального преобразователя 21 подключен к выходу третьего многофункционального преобразователя 16, а пятый вход - к выходу четвертого многофункционального преобразователя 17. Выход шестого многофункционального преобразователя 21 присоединен к седьмому входу пятого многофункционального преобразователя 18 и ко входу второго блока регистрации 22.
Датчики тока 2 и 4 фиксируют соответственно на первой и второй подстанциях суммарные токи IA и IB фидеров контактной сети данного плеча питания. Датчик тока 1 фиксирует ток I'1 поврежденной контактной сети на первой подстанции. Датчики напряжений 3 и 5 фиксируют напряжения UA и UB соответственно на первой и второй подстанциях. Датчики фазовых углов 6, 7 и 8 фиксируют фазовые углы ϕ1, ϕA, и ϕB соответственно между напряжением UA и током I'1, а также напряжением UA и током IA первой подстанции и напряжением UB и током IB второй подстанции.
Первый многофункциональный преобразователь фазового угла 9 формирует на выходе сигнал ψA, реализуя вычислительный алгоритм в виде выражения
где ZпА - сопротивление первой подстанции.
Второй многофункциональный преобразователь фазового угла 10 формирует выходной сигнал ψB, реализуя вычислительный алгоритм в виде выражения
где ZпВ - сопротивление второй подстанции.
Сумматоры 11, 12, и 13 формируют на выходе соответственно сигналы α1, αA, αB, реализуя вычислительные алгоритмы в виде выражений
α1 = ϕ1+ψA, (3)
αA = ϕA+ψA, (4)
αB = ϕB+ψB. (5)
Первый многофункциональный преобразователь 14 формирует выходной сигнал М, реализуя вычислительный алгоритм в виде выражения
где zс, xвс - известное полное индуктивно развязанное сопротивление контактной сети одного пути и его индуктивная составляющая на длине 1 км;
zвс, xвс - известное полное индуктивно развязанное сопротивление взаимной индуктивной связи контактных сетей смежных путей и его индуктивная составляющая на длине 1 км;
zp, rp, xp - известное полное индуктивно развязанное сопротивление рельсовой цепи и его активная и индуктивная составляющие на длине 1 км; известный фазовый угол (аргумент) полного сопротивления zc-zвс;
известный фазовый угол (аргумент) полного сопротивления zc-zвс;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли.
Второй многофункциональный преобразователь 15 формирует выходной сигнал  реализуя вычислительный алгоритм в виде выражения
реализуя вычислительный алгоритм в виде выражения
Третий многофункциональный преобразователь 16 формирует выходной сигнал Iк, реализуя вычислительный алгоритм в виде выражения
Четвертый многофункциональный преобразователь формирует выходной сигнал αк, реализуя вычислительный алгоритм в виде выражения
Пятый многофункциональный преобразователь 18 формирует выходной сигнал lк, реализуя вычислительный алгоритм в виде выражения
Шестой многофункциональный преобразователь 21 формирует выходной сигнал Rд, реализуя вычислительный алгоритм в виде выражения
Функциональный преобразователь 19 формирует зависимость между удаленностью lк короткого замыкания и коэффициентом ν, учитывающим шунтирующее влияние земли (утечку тока из рельсов в землю) на участке от первой подстанции до места короткого замыкания. На основании [7] такой функциональный преобразователь может реализовывать вычислительный алгоритм (или нелинейную зависимость) в виде выражения
где m - известная величина, зависящая от значения сопротивления контура рельсы-земля и высоты подвеса контактной сети;
γ - известный коэффициент распространения рельсовой цепи.
Для того, чтобы блок регистрации 18 фиксировал значение удаленности lк с учетом действительного значения коэффициента ν, соответствующего именно этой величине удаленности, функциональный преобразователь 19 включен в цепь обратной связи первого 14 и второго 15 многофункциональных преобразователей.
Датчики тока 1, 2 и 4 выполняются известным образом на основе, например, измерительных трансформаторов тока. Датчики напряжения 3 и 5 выполняются известным образом на основе, например, измерительных трансформаторов напряжения. Датчики фазового угла 6, 7 и 8 выполняются известным образом на основе цифровых или аналоговых фазометров [8].
Функциональный и многофункциональные преобразователи 9, 10, 14, 15, 16, 17, 18 и 19 могут быть выполнены с применением аналоговых [9] или цифровых микросхем и микропроцессорных комплектов [10].
Многофункциональный преобразователь 21 может быть выполнен с применением аналоговых [9] или цифровых микросхем и микропроцессорных комплектов [10].
При возникновении в контактной сети короткого замыкания датчики тока 1, 2 и 4, датчики напряжения 3 и 5, датчики фазового угла 6, 7 и 8 фиксируют на первой и второй подстанциях параметры аварийного режима соответственно I'1, IA, IB, UA, UB, ϕ1, ϕA, ϕB. Сигналы, несущие информацию о постоянных параметрах подстанций, параметрах тяговой сети и параметрах аварийного режима, поступают на соответствующие входы сумматоров, многофункциональных и функционального преобразователей, которые по заданным алгоритмам (1)-(9) и (11), (12), (13) удаленность короткого замыкания lк и сопротивление дуги (переходное сопротивление) Rд.
Достигаемый технический результат (преимущества по сравнению с прототипом) заключается в следующем:
- однозначная и прямая зависимость искомого расстояния lк от параметров аварийного режима и постоянных параметров тяговой сети;
- отсутствие влияния сопротивления дуги на результаты определения расстояния lк;
- отсутствие влияния утечки тока из рельсов в землю (шунтирующее влияние земли) на результаты определения lк;
- возможность определения сопротивления дуги в месте короткого замыкания, что позволяет прогнозировать характер повреждения.
Обоснование aлгoритмов для 1-го и 2-го вариантов
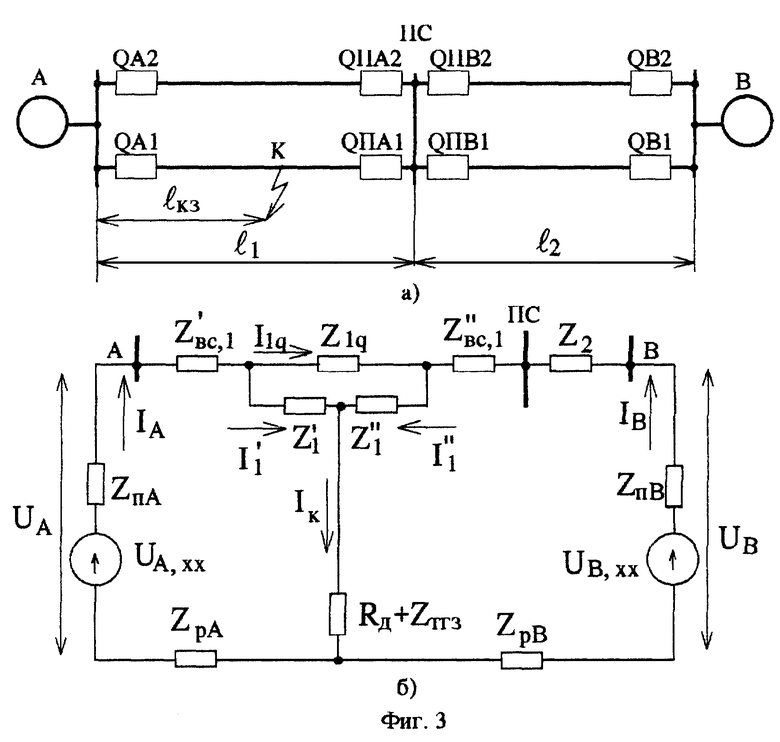
Обоснование работоспособности и точности изобретения основано на известной индуктивно развязанной схеме замещения тяговой сети участка электрифицированной железной дороги [7]. На фиг. 3, а приведена схема питания от двух смежных подстанций А и В двухпутного участка (межподстанционной зоны) с постом секционирования ПС. Расстояние от подстанции А до точки К короткого замыкания - lк, до поста секционирования ПС - l1. Расстояние от поста секционирования ПС до подстанции В - l2. Устройства для определения удаленности места короткого замыкания размещаются в местах установки высоковольтных выключателей QA1, QA2, QB1, QB2. Обоснование приведено для устройства, размещенного в месте установки выключателя QA1. Для его размещения у других выключателей обоснование аналогично.
Приведенной схеме питания соответствует индуктивно развязанная схема замещения, показанная на фиг. 3б и воспроизведенная из [7].
На схеме замещения приняты обозначения:
UA,xx, UB,xx - напряжения холостого хода соответственно подстанций А и В;
UA, UB - напряжения на шинах соответственно подстанций А и В;
IA, IB - суммарные токи фидеров данного плеча питания соответственно подстанций А и В;
Iк - ток в дуге в месте короткого замыкания;
I'1, I''1 - токи поврежденной контактной сети соответственно на участках lк и l1-lк;
ZпА, ZпВ - сопротивления соответственно подстанций А и В;
ZpA, ZpB - сопротивления рельсовой цепи соответственно на участках lк и l1+l2-lк, т.е. от точки К до соответствующих подстанций А и В;
Z'1, Z"1 - сопротивления поврежденной контактной сети соответственно на участках lк и l1-lк;
Z1q - сопротивление контактной сети другого пути на участке l1;
Z'вс, Z"вс - сопротивления, учитывающие взаимное индуктивное влияние контактных сетей двух путей на участках соответственно lк и l1-lк;
Z2 - сопротивление контактной сети двух путей на участке l2;
Rд - сопротивление электрической дуги.
В соответствии с [7] имеем:
где zc - значение полного погонного индуктивно развязанного сопротивления контактной сети одного пути на длине 1 км;
zвс - погонное значение индуктивно развязанного сопротивления взаимоиндукции между контактными сетями двух путей на длине 1 км;
zp - погонное значение индуктивно развязанного сопротивления рельсовой цепи на длине 1 км;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли.
На основании второго закона Кирхгофа имеем:
Подставив сюда выражения (14) и решив уравнение относительно lк, получаем:
Формула (15) определяет однозначную зависимость удаленности lк короткого замыкания от влияющих факторов. Для ее практического использования необходимо иметь сведения не только о величине напряжения UA и токах IA, I'1 (и их фазовых углах), которые могут быть измерены, но и о величинах Iк (и его фазовом угле) и Rд, которые в момент внезапного короткого замыкания измерены быть не могут.
Особенностью предложенных в изобретении алгоритмов является отсчет всех векторов синусоидальных величин напряжений и токов в схеме замещения от одной оси. В качестве такой оси принимаются направления векторов напряжений холостого хода UA,xx и UB,xx, которые считаются совпадающими по фазе. Кроме того, используется известное положение, согласно которому полное сопротивление тяговых трансформаторов принимается равным его индуктивной составляющей (ZпА=XпА).
На векторной диаграмме, приведенной на фиг. 4, показаны взаимные расположения векторов 


 Ток IA отстает от напряжения UA на угол ϕA. Ток I'1 отстает от напряжения UA на угол ϕ1. В свою очередь напряжение UA отстает от напряжения UA,xx на угол ψA, который зависит от падения напряжения
Ток IA отстает от напряжения UA на угол ϕA. Ток I'1 отстает от напряжения UA на угол ϕ1. В свою очередь напряжение UA отстает от напряжения UA,xx на угол ψA, который зависит от падения напряжения  в сопротивлении подстанции. Поскольку это сопротивление носит практически чисто индуктивный характер, то вектор падения напряжения
в сопротивлении подстанции. Поскольку это сопротивление носит практически чисто индуктивный характер, то вектор падения напряжения  опережает вектор тока
опережает вектор тока  на угол 90o. Векторная диаграмма для подстанции В имеет аналогичный вид.
на угол 90o. Векторная диаграмма для подстанции В имеет аналогичный вид.
На основании теорем косинусов и синусов для треугольника получаем из этих векторных диаграмм выражения (1) и (2).
Комплексная величина тока короткого замыкания, как известно равна
где Iк,а, Iк,p - соответственно активная и реактивная составляющие тока Iк.
Из векторной диаграммы (фиг. 4) следует, что фазовый угол между напряжением  и током
и током  равен αA = ϕA+ψA. Аналогично имеем величину фазового угла между напряжением
равен αA = ϕA+ψA. Аналогично имеем величину фазового угла между напряжением  и током
и током  , равным αB = ϕB+ψB. Следовательно, имеем:
, равным αB = ϕB+ψB. Следовательно, имеем:
Iк,a = IAcosαA+IBcosαB
Iк,р = IAsinαA+IBsinαB.
Модуль тока короткого замыкания равен:
Подставив сюда выражения для Iк,а и Iк,р, получим формулу (8). Аргумент тока короткого замыкания равен:
Подставив сюда значение Iк,р и Iк из формулы (8), получим выражение (9). Обозначим:
где  аргументы сопротивлений соответственно
аргументы сопротивлений соответственно  и
и 
Используя фазовые углы  измеренные от одной оси, формулу (15) представим в виде:
измеренные от одной оси, формулу (15) представим в виде:
Знаменатель этого выражения представим в виде:
Используя для показательной функции формулу Эйлера, получим значение активной Ма и реактивной Мр составляющих величины М.

Модуль величины  равен
равен
Подставив сюда значения Mа и Мр, получим формулу (6). Аргумент величины  равен:
равен:
Подставив сюда значение Мр и значение М из формулы (6), получим формулу (7).
С учетом полученных выражений формула (16) может быть теперь представлена в виде: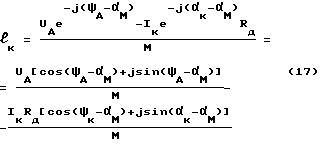
Поскольку расстояние lк не имеет мнимой части по определению (оно вещественно), то в числителе выражения (17) сумма всех членов, содержащих множитель j, равна нулю, т. е.
UAsin(ψA-αM)-IкRдsin(αк-αM) = 0 (18)
Решая это выражение относительно сопротивления дуги, получаем формулу (13). Учитывая условие (18) и подставляя в выражение (16) формулу (13) получаем выражение (10).
Источники информации
1. Фигурнов Е.П., Самсонов Ю.Я. Устройство определения места короткого замыкания в контактной сети железных дорог переменного тока. А.с. 161410, кл. G 01 r; 21 е. 29/10; B 61 m; 20 к 20, заявл. 787278/24-7, опубл. 16.07.62, БИ 7.
2. Фигурнов Е. П. Защита электротяговых сетей переменного тока от коротких замыканий. М.: Транспорт, 1979. 160 с.
3. А.с. СССР 740555, М.кл2 В 60 М 1/100. Устройство для определения места повреждения тяговой сети электрифицированной железной дороги. А.С. Бочев, В. В. Кузнецов, М.Ю. Тупченко, Е.П. Фигурнов (СССР). - 2662505/24-11; заявл. 13.09.78; опубл. 15.06.80, БИ 22
4. Бочев А.С., Кузнецов В.В., Тупченко М.Ю. Возможный способ определения места короткого замыкания в тяговой сети 2х25 кВ. - В кн.: Режимы работы, диагностика и контроль устройств электроснабжения железных дорог. Ростов н/Д, 1979. С. 43-47.
5. Тупченко М. Ю. Определение мест повреждения в электротяговых сетях 2х25 кВ с автотрансформаторами. Кандидатская диссертация. - М.: МИИТ, 1984.
6. Система телемеханики "Лисна" для электрифицированных железных дорог / Е. Е. Байкеев, Г.М. Корсаков, В.Я. Овласюк, Н.Д. Сухопрудский. Под ред. Н.Д. Сухопрудского. - М.: Транспорт, 1979. 215 с.
7. Фигурнов Е. П. Сопротивления электротяговой сети однофазного переменного тока. Электричество, 1997, 5. С. 23-29.
8. Основы метрологии и электрические измерения / Б.Я. Авдеев, Е.М. Антонюк, Е. М. Душин и др./ Под ред. Е.М. Душина. - 6-е изд., перераб. и доп. - Л.: Энергоатомиздат, 1987.
9. Алексенко А. Г., Коломбет Е. А., Стародуб Г. И. Применение прецизионных аналоговых микросхем. Изд. 2-е, перераб. и доп. - М.: Радио и связь, 1985.
10. Цифровые и аналоговые интегральные микросхемы: Справочник/ С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова и др.; Под ред. С.В. Якубовского. - М.: Радио и связь, 1990. 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УКАЗАТЕЛЬ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2153426C2 |
| ОПРЕДЕЛИТЕЛЬ МЕСТА ПОВРЕЖДЕНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2160673C2 |
| ОПРЕДЕЛИТЕЛЬ МЕСТА ПОВРЕЖДЕНИЯ ТЯГОВОЙ СЕТИ | 1998 |
|
RU2177417C2 |
| УКАЗАТЕЛЬ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ В ТЯГОВОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2160193C2 |
| ОПРЕДЕЛИТЕЛЬ УДАЛЕННОСТИ ПОВРЕЖДЕНИЯ КОНТАКТНОЙ СЕТИ (ВАРИАНТЫ) | 2001 |
|
RU2189607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ КОНТАКТНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2001 |
|
RU2189606C1 |
| ТЯГОВАЯ ПОДСТАНЦИЯ ПОСТОЯННОГО ТОКА СО СВЕРХПРОВОДНИКОВЫМ ИНДУКТИВНЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2003 |
|
RU2259284C2 |
| Способ определения удаленности места повреждения контактной сети (варианты) | 2015 |
|
RU2609727C1 |
| Способ определения удаленности короткого замыкания контактной сети (варианты) | 2015 |
|
RU2610826C1 |
| Способ определения удаленности короткого замыкания контактной сети электрического транспорта (варианты) | 2015 |
|
RU2619625C2 |

Изобретение относится к электрифицированному транспорту и может использоваться в системах электроснабжения тяги для определения места короткого замыкания. Устройство содержит датчик, измеряющий суммарный ток фидеров контактной сети данного плеча питания, и датчик напряжения на первой подстанции. Имеются датчик, измеряющий суммарный ток фидеров контактной сети того же плеча питания, и датчик напряжения на второй подстанции, а также первый сумматор и блок регистрации. Согласно первому варианту, устройство снабжено датчиком тока фидера поврежденной контактной сети, датчиками и многофункциональными преобразователями фазовых углов, сумматорами, а также первым, вторым, третьим, четвертым и пятым многофункциональными преобразователями и функциональным преобразователем. Устройство по второму варианту дополнительно содержит шестой многофункциональный преобразователь и второй блок регистрации для определения места короткого замыкания. Техническим результатом является повышение точности определения места повреждения при коротком замыкании в тяговой сети. 2 c.п.ф-лы, 4 ил.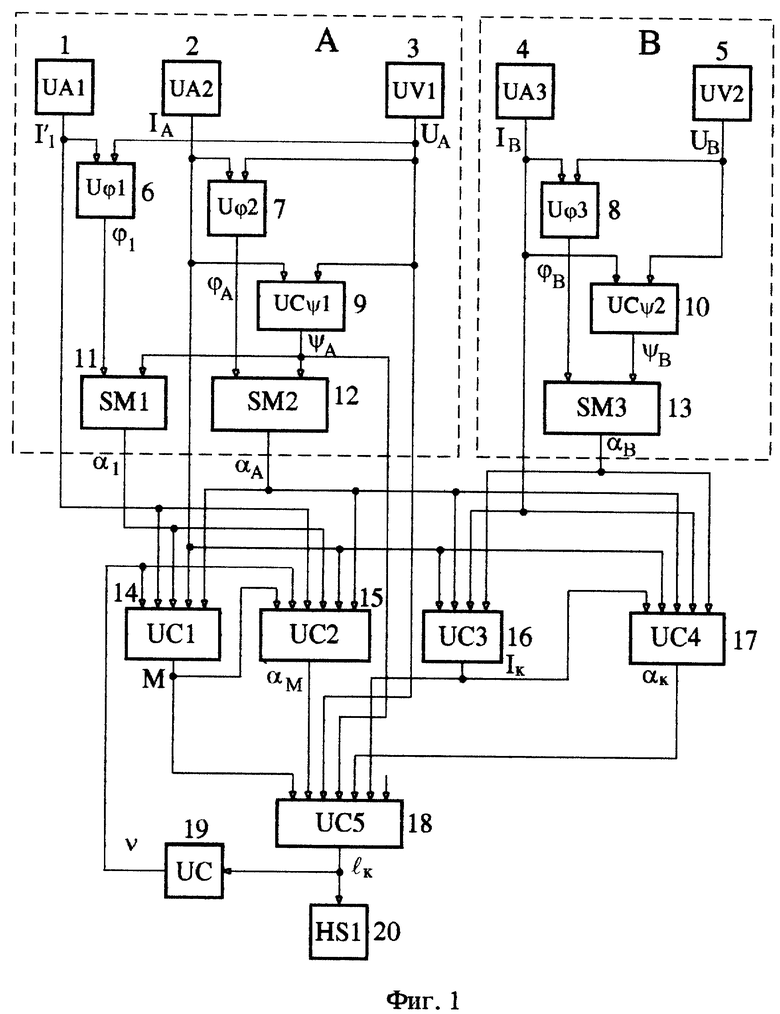

второй многофункциональный преобразователь фазового угла формирует выходной сигнал ψB, реализуя вычислительный алгоритм в виде выражения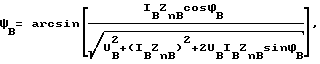
первый сумматор формирует выходной сигнал α1, реализуя вычислительный алгоритм в виде выражения α1= ϕ1+ψA, второй сумматор формирует выходной сигнал αA, реализуя вычислительный алгоритм в виде выражения αA= ϕA+ψA, третий сумматор формирует выходной сигнал αB, реализуя вычислительный алгоритм в виде выражения αB= ϕB+ψB, первый многофункциональный преобразователь формирует выходной сигнал М, реализуя вычислительный алгоритм в виде выражения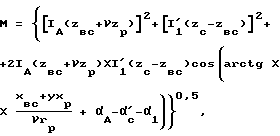
второй многофункциональный преобразователь формирует выходной сигнал  реализуя вычислительный алгоритм в виде выражения
реализуя вычислительный алгоритм в виде выражения
третий многофункциональный преобразователь формирует выходной сигнал Iк, реализуя вычислительный алгоритм в виде выражения
четвертый многофункциональный преобразователь формирует выходной сигнал αк, реализуя вычислительный алгоритм в виде выражения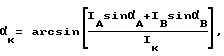
пятый многофункциональный преобразователь формирует выходной сигнал lк, реализуя вычислительный алгоритм в виде выражения
где zвс, xвс - полное индуктивно развязанное сопротивление взаимной индуктивной связи контактных сетей смежных путей и его индуктивная составляющая на длине 1 км;
zс - полное индуктивно развязанное сопротивление контактной сети одного пути на длине 1 км;
zp, rp, xp - полное индуктивно развязанное сопротивление рельсовой цепи и его активная и индуктивная составляющие на длине 1 км;
ZnA, ZnB - сопротивления соответственно первой и второй подстанций; фазовый угол (аргумент) полного сопротивления zc-zвс;
фазовый угол (аргумент) полного сопротивления zc-zвс;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли;
lк - выходной сигнал, характеризующий расстояние от первой подстанции до места короткого замыкания.
второй многофункциональный преобразователь фазового угла формирует выходной сигнал ψB, реализуя вычислительный алгоритм в виде выражения
первый сумматор формирует выходной сигнал α1, реализуя вычислительный алгоритм в виде выражения α1= ϕ1+ψA, второй сумматор формирует выходной сигнал  реализуя вычислительный алгоритм в виде выражения αA= ϕA+ψA, третий сумматор формирует выходной сигнал αB, реализуя вычислительный алгоритм в виде выражения αB= ϕB+ψB, первый многофункциональный преобразователь формирует выходной сигнал M, реализуя вычислительный алгоритм в виде выражения
реализуя вычислительный алгоритм в виде выражения αA= ϕA+ψA, третий сумматор формирует выходной сигнал αB, реализуя вычислительный алгоритм в виде выражения αB= ϕB+ψB, первый многофункциональный преобразователь формирует выходной сигнал M, реализуя вычислительный алгоритм в виде выражения
второй многофункциональный преобразователь формирует выходной сигнал αM, реализуя вычислительный алгоритм в виде выражения
третий многофункциональный преобразователь формирует выходной сигнал Iк, реализуя вычислительный алгоритм в виде выражения
четвертый многофункциональный преобразователь формирует выходной сигнал αk, реализуя вычислительный алгоритм в виде выражения
пятый многофункциональный преобразователь формирует выходной сигнал lk, характеризующий расстояние от первой подстанции до места короткого замыкания, реализуя вычислительный алгоритм в виде
где RД - сигнал, формируемый на выходе шестого многофункционального преобразователя и соответствующий сопротивлению места короткого замыкания, полученный путем реализации указанным преобразователем вычислительного алгоритма в виде выражения
где zвс, xвс - полное индуктивно развязанное сопротивление взаимной индуктивной связи контактных сетей смежных путей и его индуктивная составляющая на длине 1 км;
zс - полное индуктивно развязанное сопротивление контактной сети одного пути на длине 1 км;
zp, rp, xp - полное индуктивно развязанное сопротивление рельсовой цепи и его активная и индуктивная составляющие на длине 1 км;
ZnA, ZnB - сопротивления соответственно первой и второй подстанций; фазовый угол (аргумент) полного сопротивления zс-zвс;
фазовый угол (аргумент) полного сопротивления zс-zвс;
ν - коэффициент, учитывающий снижение сопротивления рельсовой цепи за счет шунтирующего влияния земли.
| 1-Окси-2,2-динитропропилсерная кислота в качестве катализатора этерификации 2,2-динитропропандиола-1,3 азотной кислотой | 1978 |
|
SU740755A1 |
| Устройство для определения места короткого замыкания в электрических линиях | 1985 |
|
SU1394177A1 |
| Устройство для защиты фидеров электрических железных дорог | 1986 |
|
SU1466969A1 |
| JP 05172892 A1, 13.07.1993 | |||
| US 3735204 A, 22.05.1973 | |||
| Устройство для приведения во вращение барабанов индикаторов многоцилиндровых двигателей | 1929 |
|
SU13860A1 |
