Вариант 1
Изобретение относится к электрифицированному транспорту и может использоваться для определения удаленности места повреждения контактной сети однофазного переменного тока на многопутных участках.
Известно устройство /1/, предназначенное для фиксации тока короткого замыкания поврежденной линии. Оно содержит датчик тока поврежденной линии и блок регистрации. Об удаленности места повреждения судят по величине зафиксированного тока короткого замыкания. Устройства аналогичного вида описаны в /2/. Недостатком этих устройств является низкая точность, поскольку величина тока короткого замыкания зависит не только от удаленности места повреждения, но и от уровня напряжения на шинах питающей подстанции и от наличия дуги или переходного сопротивления в месте повреждения /3/.
Известно устройство, реализующее метод двухстороннего измерения токов короткого замыкания контактной сети на двух смежных подстанциях /4/. Такое устройство содержит датчик тока IA на одной подстанции и датчик тока IB на другой подстанции, многофункциональный преобразователь, в виде сумматора и делителя, и блок регистрации. В момент короткого замыкания измеряют токи IA и IB, а многофункциональный преобразователь реализует алгоритм в виде математических выражений IA/(IA+IB) или IВ/(IA+IB). По значениям этих отношений, фиксируемых в блоке регистрации, судят об удаленности места короткого замыкания.
Недостатками этого устройства являются нелинейная зависимость между указанными отношениями и удаленностью места повреждения (особенно при повреждениях, близких к подстанциям) и заметная погрешность при различии уровня напряжений на смежных подстанциях. Согласно /4, с.74/ при различии в уровнях напряжения смежных подстанций в 10% погрешность определения удаленности достигнет 5%. При расстоянии до поста секционирования 25 км погрешность составляет таким образом 1,25 км, что очень много. Кроме того, существенным недостатком этого устройства является необходимость передачи по каналам связи сведений о токе смежной подстанции, что резко усложняет устройство и вносит дополнительную погрешность из-за помех в каналах связи.
Известно устройство /5/, так же основанное на методе двухстороннего измерения параметров аварийного режима контактной сети на двух смежных подстанциях, реализующее вычислительный алгоритм в виде математического выражения:
где l1 - расстояние от первой подстанции до поста секционирования или, при его отсутствии, до второй подстанции;
lк - расстояние от первой подстанции до места короткого замыкания;
I'1 - ток фидера контактной сети поврежденного пути;
IA - ток первой подстанции;
IK - ток, протекающий через место короткого замыкания;
ϕ1, ϕA - фазовые углы токов соответственно I'1 и IA относительно напряжения на шинах UA;
ψA, αk - аргументы, вычисляемые по специальным алгоритмам.
Устройство содержит датчик тока I'1 фидера контактной сети поврежденного пути и датчик тока IA первой подстанции, датчик тока IB второй подстанции, датчики напряжения UA и UB первой и второй подстанций, измерители фазовых углов ϕA, ϕB, ϕ1 указанных токов, задатчики сопротивлений тяговой сети, задатчик расстояния l1 и пять многофункциональных преобразователей. При этом сведения о токе IB, напряжении UB и фазовом угле ϕB, измеренных на второй подстанции, должны поступать на первую подстанцию по каналам связи.
Недостатками этого устройства, принятого в качестве прототипа, являются сложность и погрешности, обусловленные использованием датчика тока IA подстанции и каналов связи. Известно, что ток подстанции IA содержит не только составляющие токов фидеров контактной сети разных путей, но и составляющие тока собственных нужд подстанции, а также составляющую тока нетяговых потребителей, питаемых от линии ДПР (два провода - рельс) /6/. Составляющие тока собственных нужд и линии ДПР не имеют отношения к току короткого замыкания и являются поэтому причиной погрешности в приведенном алгоритме. Еще одна погрешность возникает в каналах связи из-за помех.
Техническим результатом изобретения является упрощение и повышение точности определения удаленности места повреждения при односторонних измерениях токов аварийного режима контактной сети.
Сущность изобретения заключается в том, что в устройство для определeния места повреждения контактной сети многопутного участка, включающей первую и вторую подстанции и пост секционирования, содержащее датчик тока I'11 фидера контактной сети поврежденного пути, задатчик сигнала l1, характеризующего расстояние от первой подстанции до поста секционирования, первый, второй, третий, четвертый и пятый программируемые многофункциональные преобразователи, дополнительно введены датчик тока I12 фидера контактной сети смежного пути, задатчик сигнала r22, характеризующего активное погонное сопротивление тяговой сети, задатчик сигнала х22, характеризующего погонное индуктивное сопротивление тяговой сети, задатчик сигнала ХпА, характеризующего сопротивление первой подстанции, задатчик сигнала ХпВ, характеризующего сопротивление второй подстанции, задатчик сигнала l2, характеризующего расстояние от поста секционирования до второй подстанции, шестой и седьмой программируемые многофункциональные преобразователи и блок регистрации, причем выходы датчиков тока I'11 и I12 присоединены соответственно к первому и второму входам первого программируемого многофункционального преобразователя, выход которого подключен к первому входу седьмого программируемого многофункционального преобразователя, задатчик сигнала r22 подключен к первым входам второго и четвертого программируемых многофункциональных преобразователей, выходы которых присоединены соответственно к первому и третьему входам шестого программируемого многофункционального преобразователя, задатчик сигнала х22 подключен к первым входам третьего и пятого программируемых многофункциональных преобразователей, выходы которых присоединены соответственно ко второму и четвертому входам шестого программируемого многофункционального преобразователя, выход которого подключен к третьему входу седьмого программируемого многофункционального преобразователя, задатчик сигнала ХпA подключен к четвертому входу третьего программируемого многофункционального преобразователя, задатчик сигнала ХпВ подключен к пятому входу третьего и четвертому входу пятого программируемых многофункциональных преобразователей, задатчик сигнала l1 подключен ко вторым входам второго, третьего, четвертого и пятого программируемых многофункциональных преобразователей, к третьим входам которых подключен задатчик сигнала l2, и ко второму входу седьмого программируемого многофункционального преобразователя, выход которого присоединен к четвертому входу четвертого и к пятому входу пятого программируемых многофункциональных преобразователей и к блоку регистрации, при этом первый программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "g" путем реализации вычислительного алгоритма в виде математического выражения:
второй программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "а" путем реализации вычислительного алгоритма в виде математического выражения:
a=r22(l1+l2),
третий программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "b" путем реализации вычислительного алгоритма в виде математического выражения:
b=ХпА+ХпВ+х22(l1+l2),
четвертый программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "с" путем реализации вычислительного алгоритма в виде математического выражения:
с=r22(l1+l2-lK),
пятый программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "d" путем реализации вычислительного алгоритма в виде математического выражения:
d=XпВ+х22(l1+l2-lK),
шестой программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "Δ" путем реализации вычислительного алгоритма в виде математического выражения:
седьмой программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "lK", характеризующего расстояние от первой подстанции до места короткого замыкания, путем реализации вычислительного алгоритма в виде математического выражения:
lK=(1-gΔ)l1.
Сущность изобретения (вариант 1) поясняется на фиг.1, на которой приведена схема питания двухпутного участка и структурная схема устройства. На фиг.1 приняты следующие обозначения:
А - первая тяговая подстанция;
В - вторая тяговая подстанция;
ПС - пост секционирования;
К - место короткого замыкания на контактной сети первого пути;
1 - датчик тока I'11 фидера поврежденной контактной сети;
2 - датчик тока I12 фидера контактной сети смежного пути;
3 - задатчик сигнала r22, характеризующего погонное активное сопротивление тяговой сети;
4 - задатчик сигнала х22, характеризующего погонное индуктивное сопротивление тяговой сети;
5 - задатчик сигнала ХпА, характеризующего сопротивление первой подстанции;
6 - задатчик сигнала ХпВ, характеризующего сопротивление второй подстанции;
7 - задатчик сигнала l1, характеризующего расстояние от первой подстанции А до поста секционирования ПС;
8 - задатчик сигнала l2, характеризующего расстояние от поста секционирования ПС до второй подстанции В;
9 - первый программируемый многофункциональный преобразователь;
10 - второй программируемый многофункциональный преобразователь;
11 - третий программируемый многофункциональный преобразователь;
12 - четвертый программируемый многофункциональный преобразователь;
13 - пятый программируемый многофункциональный преобразователь;
14 - шестой программируемый многофункциональный преобразователь;
15 - седьмой программируемый многофункциональный преобразователь;
16 - блок регистрации.
Элементы 1, 7, 9, 10, 11, 12, 13 являются известными, используемыми в прототипе. Остальные элементы и связи между ними являются новыми.
Выходы датчиков тока 1 и 2 подключены ко входам первого программируемого многофункционального преобразователя 9, выход которого соединен с первым входом седьмого программируемого многофункционального преобразователя 15. Задатчик 3 присоединен к первым входам второго 10 и четвертого 12 программируемых многофункциональных преобразователей. Задатчик 4 присоединен к первым входам третьего 11 и пятого 13 программируемых многофункциональных преобразователей. Задатчик 5 присоединен к четвертому входу третьего 11 программируемого многофункционального преобразователя. Задатчик 6 присоединен к пятому входу третьего 11 и четвертому входу пятого 13 программируемых многофункциональных преобразователей. Задатчик 7 присоединен ко вторым входам второго 10, третьего 11, четвертого 12, пятого 13 и седьмого 15 программируемых многофункциональных преобразователей. Задатчик 8 присоединен к третьим входам второго 10, третьего 11, четвертого 12 и пятого 13 программируемых многофункциональных преобразователей. Выходы второго 10, третьего 11, четвертого 12 и пятого 13 программируемых многофункциональных преобразователей присоединены соответственно к первому, второму, третьему и четвертому входам шестого 14 программируемого многофункционального преобразователя, выход которого подключен к третьему входу седьмого 15 программируемого многофункционального преобразователя, выход которого в свою очередь соединен с четвертым входом четвертого 12, пятым входом пятого 13 программируемых многофункциональных преобразователей и к блоку регистрации 16.
Соединение выхода седьмого 15 со входами четвертого 12 и пятого 13 программируемых многофункциональных преобразователей образует обратную связь. При выполнении устройства с помощью цифровых элементов обратная связь реализуется методом итераций (последовательных приближений).
Первый программируемый многофункциональный преобразователь 9 реализует вычислительный алгоритм в виде математического выражения:
второй программируемый многофункциональный преобразователь 10 реализует вычислительный алгоритм в виде математического выражения:
a=r22(l1+l2), (2)
третий программируемый многофункциональный преобразователь 11 реализует вычислительный алгоритм в виде математического выражения:
b=ХпА+ХпВ+х22(l1+l2), (3)
четвертый программируемый многофункциональный преобразователь 12 реализует вычислительный алгоритм в виде математического выражения:
c=r22(l1+l2-lк), (4)
пятый программируемый многофункциональный преобразователь 13 реализует вычислительный алгоритм в виде математического выражения:
d=ХпВ+х22(l1+l2-lк), (5)
шестой программируемый многофункциональный преобразователь 14 реализует вычислительный алгоритм в виде математического выражения:
седьмой программируемый многофункциональный преобразователь 15 реализует вычислительный алгоритм в виде математического выражения:
lк=(l-gΔ)l1, (7)
где lК - сигнал, характеризующий удаленность от первой подстанции места короткого замыкания контактной сети.
Датчики тока 1 и 2 выполнены в виде трансформаторов тока. Задатчики 3, 4, 5, 6, 7 и 8 выполняются известным образом в виде источника напряжения, потенциометра, аналогового операционного усилителя или шифратора цифрового кода. Программируемые многофункциональные преобразователи реализуют вычислительные алгоритмы, состоящие из арифметических действий, и поэтому могут быть выполнены известным образом на элементах аналоговой или цифровой техники.
При возникновении короткого замыкания в контактной сети датчики тока 1 и 2 фиксируют значения тока фидера контактной сети поврежденного пути I'11 и тока фидера контактной сети смежного пути I12. При числе путей более двух, датчик тока 2 фиксирует ток I12 контактных сетей всех смежных путей. На основании этих значений токов и значений параметров контактной сети и подстанций, зафиксированных в памяти задатчиков 2, 3, 4, 5, 6, 7 и 8, устройство реализует вычислительные алгоритмы в виде математических выражений (1), (2), (3), (4), (5), (6) и (7) и фиксирует в блоке регистрации 16 сигнал 1к, значение которого характеризует удаленность от первой подстанции места повреждения контактной сети.
Вариант 2
Изобретение относится к электрифицированному транспорту и может использоваться для определения удаленности места повреждения контактной сети однофазного переменного тока на многопутных участках при петлевой схеме питания.
Известно устройство /1/, предназначенное для фиксации тока короткого замыкания поврежденной линии. Оно содержит датчик тока поврежденной линии и блок регистрации. Об удаленности места повреждения судят по величине зафиксированного тока короткого замыкания. Устройства аналогичного вида описаны в /2/. Недостатком этих устройств является низкая точность, поскольку величина тока короткого замыкания зависит не только от удаленности места повреждения, но и от уровня напряжения на шинах подстанции и от наличия дуги или переходного сопротивления в месте повреждения /3/.
Известно устройство, реализующее метод двухстороннего измерения токов короткого замыкания контактной сети на двух смежных подстанциях /4/. Такое устройство содержит датчик тока IА на одной подстанции и датчик тока IВ на другой подстанции. Об удаленности короткого замыкания судят по отношениям IA/(IA+IB) или IB/(IA+IB). При петлевой схеме питания этот метод использовать нельзя, поскольку питание осуществляется не от двух, а только от одной подстанции.
Известно устройство /5/, так же реализующее метод двухстороннего измерения параметров аварийного режима контактной сети на двух смежных подстанциях, реализующее вычислительный алгоритм в виде математического выражения:
где l1 - расстояние от первой подстанции до поста секционирования или, при его отсутствии, до второй подстанции;
lк - расстояние от первой подстанции до места короткого замыкания;
I'1 - ток фидера поврежденной контактной сети;
IA - ток первой подстанции;
Iк- ток, протекающий через место короткого замыкания;
ϕ1, ϕA - фазовые углы токов соответственно I'1 и IA относительно напряжения на шинах UA;
ψA, αk - аргументы, вычисляемые по специальным алгоритмам.
Устройство содержит датчик тока I'1 фидера контактной сети поврежденного пути и датчик тока IA первой подстанции, датчик тока lВ второй подстанции, датчики напряжения UA и UB первой и второй подстанций, измерители фазовых углов ϕA, ϕB, ϕ1 указанных токов, задатчики сопротивлений тяговой сети, задатчик расстояния l1 и пять многофункциональных преобразователей. При этом сведения о токе IB, напряжении UB и фазовом угле ϕB, измеренных на второй подстанции, должны поступать на первую подстанцию по каналам связи.
Недостатками этого устройства, принятого в качестве прототипа, являются сложность и погрешности, обусловленные использованием датчика тока IA подстанции и каналов связи. Известно, что ток подстанции IA содержит не только составляющие токов фидеров контактной сети разных путей, но и составляющие тока собственных нужд подстанции, а также составляющую тока нетяговых потребителей, питаемых от линии ДПР (два провода - рельс) /6/. Составляющие тока собственных нужд и линии ДПР не имеют отношения к току короткого замыкания и являются поэтому причиной погрешности в приведенном алгоритме. Еще одна погрешность возникает в каналах связи из-за помех.
В качестве прототипа принято устройство /5/. Техническим результатом изобретения является упрощение и повышение точности определения удаленности места повреждения при петлевой схеме питания контактной сети.
Сущность изобретения заключается в том, что в устройство для определения места повреждения контактной сети многопутного участка, включающей первую и вторую подстанции и пост секционирования, содержащее датчик тока I'11 фидера контактной сети поврежденного пути, задатчик сигнала l1, характеризующего расстояние от первой подстанции до поста секционирования, первый и второй программируемые многофункциональные преобразователи, дополнительно введены датчик тока I12 фидера контактной сети смежного пути, причем выходы датчиков тока I'11 и I12 присоединены соответственно к первому и второму входам первого программируемого многофункционального преобразователя, выход которого подключен к первому входу второго программируемого многофункционального преобразователя, ко второму входу которого присоединен задатчик сигнала l1, а к выходу подключен блок регистрации, при этом первый программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "g'" путем реализации вычислительного алгоритма в виде математического выражения:
а второй программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "lK", характеризующего расстояние от подстанции до места короткого замыкания, путем реализации вычислительного алгоритма в виде математического выражения:
lK=(1-g')l1.
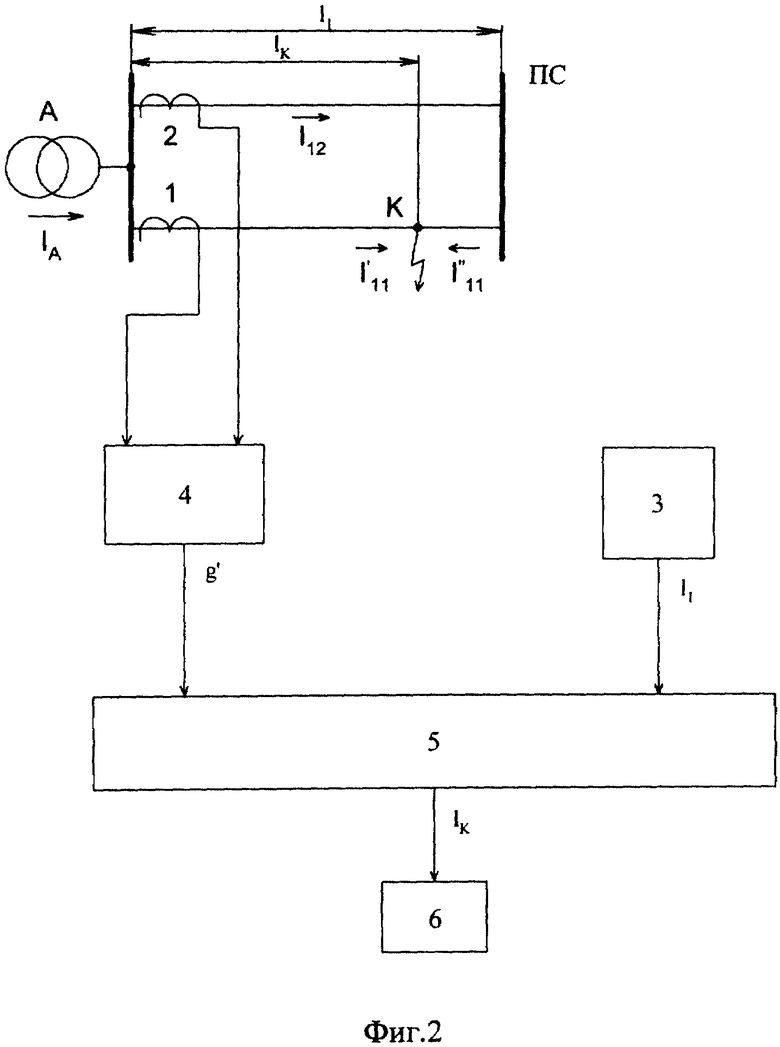
Сущность изобретения (вариант 2) поясняется на фиг.2, на которой приведены петлевая схема питания контактной сети двухпутного участка и структурная схема устройства. На фиг.2 приняты следующие обозначения:
А - тяговая подстанция;
ПС - пост секционирования;
К - место короткого замыкания на контактной сети первого пути;
1 - датчик тока I'11 фидера поврежденной контактной сети;
2 - датчик тока I12 фидера контактной сети смежного пути;
3 - задатчик сигнала l1, характеризующего расстояние от подстанции А до поста секционирования ПС;
4 - первый программируемый многофункциональный преобразователь;
5 - второй программируемый многофункциональный преобразователь;
6 - блок регистрации.
Элементы 1, 3, 4, 5 являются известными, использованными в прототипе. Элементы 2, 6 и связи - новые.
Выходы датчиков тока 1 и 2 подключены ко входам первого программируемого многофункционального преобразователя 4, выход которого присоединен к первому входу второго программируемого многофункционального преобразователя 5. К его второму входу присоединен задатчик сигнала l1 3, а к выходу - блок регистрации 6.
Первый программируемый многофункциональный преобразователь 4 реализует вычислительный алгоритм в виде математического выражения:
второй программируемый многофункциональный преобразователь 5 реализует вычислительный алгоритм в виде математического выражения:
lк=(l-g')l1, (9)
где lK - сигнал, характеризующий удаленность от подстанции места короткого замыкания контактной сети.
Датчики тока 1 и 2 выполнены в виде трансформаторов тока. Задатчик 3 выполняется известным образом в виде источника напряжения, потенциометра, аналогового операционного усилителя или шифратора цифрового кода. Программируемые многофункциональные преобразователи реализуют вычислительные алгоритмы, состоящие из арифметических действий и поэтому могут быть выполнены известным образом на элементах аналоговой или цифровой техники.
При возникновении короткого замыкания в контактной сети датчики тока 1 и 2 фиксируют значения тока фидера контактной сети поврежденного пути I'11 и тока фидера контактной сети смежного пути I12. При числе путей более двух, датчик тока 2 фиксирует ток I12 контактных сетей всех смежных путей. На основании этих значений токов и значений сигнала l1, устройство реализует вычислительные алгоритмы (8) и (9) и фиксирует в блоке регистрации 6 сигнал lK, значение которого характеризует удаленность от подстанции места повреждения контактной сети.
Обоснование вариантов устройства
Обоснование принципа действия первого и второго вариантов и точности осуществляется на основе известной схемы замещения тяговой сети двухпутного участка, приведенной в /7/. На основании законов Кирхгофа для участка между подстанцией А и постом секционирования ПС имеем:
где IA, IB, I'11, I''11 - токи контактной сети, указанные на фиг.1;
Zc,1 - индуктивно развязанное погонное сопротивление тяговой сети одного пути;
ZBC - индуктивно развязанное погонное сопротивление, учитывающее взаимную индуктивную связь контактных сетей двух путей;
lк - расстояние до места повреждения;
l1 - расстояние до поста секционирования.
Решая (10) относительно lK и используя выражения (11), получаем:
Комплексные величины, входящие в выражение (12), равны:
где I'11, IA, D - модули соответствующих комплексных величин;
ϕ1, ϕA, δ - аргументы тех же комплексных величин.
Подставив выражения (14) в (12) и используя формулу Эйлера (ejα = cosα+jsinα), получаем после простейших преобразований:
Поскольку расстояние lK вещественно, т.е. не имеет по определению мнимой части, то в выражении (15) член с сомножителем j равен нулю. Расчеты показывают также, что различие между углами ϕA и ϕ1 очень мало и не превышает 1-2 градусов. Это позволяет принять ϕA = ϕ1, тогда
Поскольку  то
то
что совпадает с выражением (1).
Обозначим:
тогда вместо (16) получим выражение (7).
Из /5/ следует, что при одинаковых напряжениях холостого хода подстанций А и В имеет место соотношение:
где ZA, ZB - сопротивления тяговой сети от места короткого замыкания соответственно до подстанций А и В, включая сопротивления этих подстанций. Эти сопротивления равны:

где ХпА, ХпВ - сопротивления подстанций А и В;
z22 - погонное сопротивление тяговой сети двухпутного участка.
Обозначим:



где r22, x22 - активная и индуктивная составляющие погонного сопротивления тяговой сети.
Эти обозначения совпадают с выражениями (2), (3), (4) и (5). Подставляя их в (17), получаем:


Модуль комплексной величины  равен:
равен:
Кроме того, очевидно:
Отсюда получаем:
что совпадает с выражением (6).
При петлевой схеме питания токи I'11 и I12 совпадают по фазе. В этом случае вместо выражения (1) справедливо соотношение (8). Кроме того при петлевой схеме питания Δ=cosδ/D=1. При этом из выражения (7) получаем формулу (9).
Вычисления показывают, что погрешность расчета по формуле (7) возрастает с уменьшением расстояния до места повреждения. При lK=l1 погрешность равна нулю, при lK= 1 км погрешность составляет 50-60 м, что значительно меньше, чем у известных устройств. Важным достоинством изобретения является независимость его точности от сопротивления дуги в месте повреждения.
Приведенное обоснование подтверждает возможность осуществления изобретения и достижения технического результата, заключающегося в повышении точности и упрощении, так как при этом не требуется измерять ток смежной подстанции, напряжения и фазовые углы данной и смежной подстанций и передавать эти данные по каналам связи в вычислительное устройство.
Источники информации
1. Авт. св. СССР 230081. Устройство для фиксации величин тока или напряжения/В.Е. Казанский, В.В. Кузнецов (СССР). Опубл. Бюл. 35, 1969.
2. Борухман А.А., Кудрявцев А.А., Кузнецов А.П. Устройства для определения мест повреждения на воздушных линиях электропередачи. Изд.2-е, перераб. и доп. - М.: Энергия, 1980.
3. Шалыт Г.М. Определение мест повреждения в электрических сетях. - М.: Энергоиздат, 1982.
4. Бочев А.С., Кузнецов В.В., Тупченко М.Ю. Методы автоматического определения места короткого замыкания при системе питания 2•25 кВ. В кн.: Релейная защита и автоматика устройств электроснабжения железных дорог. Межвуз. сб. науч. тр. Труды РИИЖТ, вып. 144. - Ростов н/Д, 1978. С.71-75.
5. Патент РФ 2160673. Определитель места повреждения контактной сети/ Фигурнов Е. П. , Петров И.П., Жарков Ю.И., Быкадоров А.Л., М. кл. 7 В 60 М 1/00, Заявл. 01.06.1998, 98110428/28, Опубл. 20.12.2000, Бюл. 35.
6. Прохорский А.А. Тяговые и трансформаторные подстанции. - М.: Транспорт, 1983.
7. Фигурнов Е. П. Сопротивления электротяговой сети однофазного переменного тока. Электричество, 1997, 5, с.23-29.
Использование: для определения места повреждения контактной сети однофазного переменного тока на многопутных участках. Технический результат заключается в повышении точности определения удаленности короткого замыкания в контактной сети. В первом варианте на тяговой подстанции установлены датчики тока на фидерах, питающих контактные сети каждого из путей. Имеется блок регистрации, задатчики сигналов, характеризующих параметры тяговой сети и смежных подстанций, задатчики сигналов, характеризующих расстояния от подстанции до поста секционирования и от поста секционирования до смежной подстанции, и программируемые многофункциональные преобразователи. Седьмой программируемый многофункциональный преобразователь выполнен с возможностью формирования выходного сигнала, характеризующего удаленность места короткого замыкания, реализуя соответствующий вычислительный алгоритм, в зависимости от токов поврежденной контактной сети и тока контактной сети смежного пути, сигналов, формируемых задатчиками, первым, вторым, третьим, четвертым, пятым и шестым программируемыми многофункциональными преобразователями. Между седьмым и четвертым, а также пятым программируемыми многофункциональными преобразователями включена обратная связь, учитывающая параметры тяговой сети в зависимости от места повреждения. Во втором варианте, предназначенном для схемы петлевого питания контактной сети, на тяговой подстанции установлены датчики тока на фидерах, питающих контактные сети каждого из путей. Имеется блок регистрации, задатчик сигнала, характеризующего расстояние от подстанции до поста секционирования, и два программируемых многофункциональных преобразователя. 2 с.п. ф-лы, 2 ил.
второй программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "a" путем реализации вычислительного алгоритма в виде математического выражения
а= r22(11+12),
третий программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "b" путем реализации вычислительного алгоритма в виде математического выражения:
b= ХпА+ХпВ+х22(11+12),
четвертый программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "с" путем реализации вычислительного алгоритма в виде математического выражения
с= r22(11+12-1k),
пятый программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "d" путем реализации вычислительного алгоритма в виде математического выражения
d= XпВ+х22(11+12-1k),
шестой программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала ≪Δ≫ путем реализации вычислительного алгоритма в виде математического выражения
седьмой программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала "Ik", характеризующего расстояние от первой подстанции до места короткого замыкания, путем реализации вычислительного алгоритма в виде математического выражения
1к= (1-gΔ)11.
а второй программируемый многофункциональный преобразователь выполнен с возможностью получения на выходе сигнала Ik, характеризующего расстояние от подстанции до места короткого замыкания, путем реализации вычислительного алгоритма в виде математического выражения
1k= (1-g'I1.
| ОПРЕДЕЛИТЕЛЬ МЕСТА ПОВРЕЖДЕНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2160673C2 |
| 0 |
|
SU158328A1 | |
| SU 849110 A, 23.07.1981 | |||
| 0 |
|
SU161410A1 | |
| УКАЗАТЕЛЬ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2153426C2 |
| УКАЗАТЕЛЬ УДАЛЕННОСТИ КОРОТКОГО ЗАМЫКАНИЯ В ТЯГОВОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2160193C2 |
| US 3593124 A, 20.03.1968 | |||
| DE 3829955 A1, 30.03.1989. | |||
