Изобретение относится к приборам для гравиинерциальных измерений.
Известно устройство для измерения на подвижном основании ускорения силы тяжести Земли гравиметром, установленным на гиростабилизированной платформе [1].
Недостатком этого устройства является низкая точность гравиметра из-за влияния ускорения движения объекта (9,81 мГл при j - 20 см/с2).
Наиболее близким к изобретению является гравиизмерительный комплекс [2].
Недостатком такого устройства является необходимость включения в комплекс двух инерциальных навигационных систем (ИНС), а также отсутствие блока оценки надежности гравиизмерений.
Техническая задача, решаемая изобретением, заключается в повышении точности и надежности гравиинерциальных измерений на подвижном основании.
Указанная задача решается за счет того, что в известное устройство, содержащее две ИНС с гравиметрами, спутниковую систему навигации, высотомер и вычислитель, работающие в диалоговом режиме, вместо двух инерциальных навигационных систем с гравиметрами устанавливается одна ИНС, на гиростабилизированной платформе которой устанавливаются три и более неортогонально размещенных гравиметров, а вычислитель может содержать бинарный фильтр для оценки неортогональных гравиинерциальных измерений и может быть подсоединен к блоку точного висения вертолета, радиомодемному блоку и иметь накопитель информации. Бинарный фильтр служит для повышения точности неортогональных гравиизмерений, а радиомодемный блок - для передачи гравиинерциальных измерений на наземный комплекс создания гравиметрических карт.
Кроме того, вычислитель может содержать фильтр Калмана для оценки ошибок ИНС с использованием спутниковой системы навигации, а также блок оценки надежности неортогональных гравиизмерений.
Изобретение иллюстрируется фиг.1 и 2.
На фиг. 2 схематически показан предлагаемый неортогональный гравиизмерительный комплекс.
Комплекс содержит гиростабилизированную платформу инерциальной навигационной системы 1, на которой расположены неортогональным образом гравиметры 2, 3 и 4. На первый 5, второй 6 и третий 7 входы вычислителя 9 подаются сигналы в виде кодов с выходов гравиметров 2, 3 и 4. Одновременно выходы с инерциальной системы по скорости 10, а также по вертикали 8 поступают на входы 18 и 19 вычислителя 9, на входы 24 и 25 которого поступают сигналы с выхода системы спутниковой навигации 23 и высотомера 26.
В вычислителе 9 функционируют фильтр Калмана 11, бинарный фильтр 12, а также блок оценки надежности гравиизмерений 13.
С выхода фильтра 11 Калмана соответственно оценки ошибок по скорости 14 и вертикали 15 поступают на гиростабилизированную платформу инерциальной навигационной системы 1 для компенсации ошибок. С выходов бинарного фильтра 12 в блоке 9 оценки гравиинерциальных измерений 21 и 22, с учетом блока оценки надежности гравиизмерений 13, подаются на входы блока системы стабилизации висения вертолета 17, а также радиомодемный блок 16 для передачи их на наземный комплекс создания гравиметрических карт 20.
Неортогональный гравиизмерительный комплекс работает следующим образом.
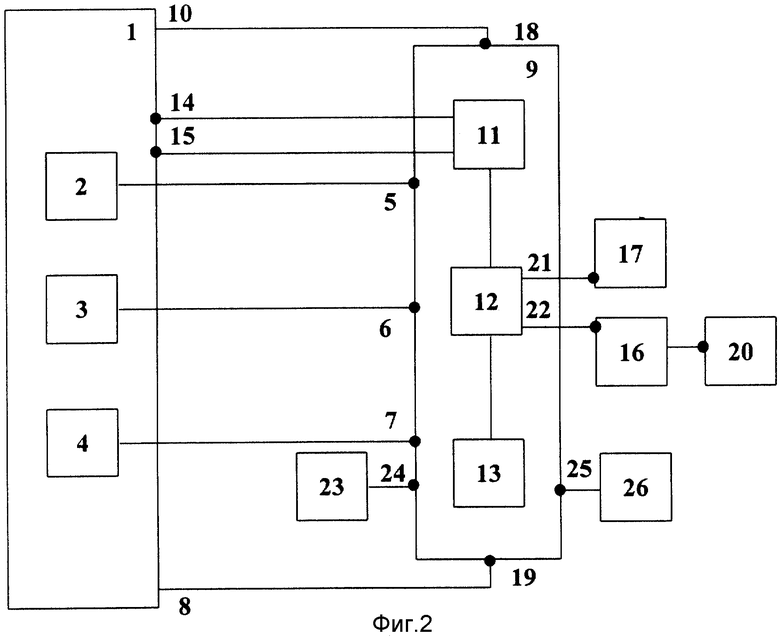
После включения обычного режима выставки инерциальной навигационной системы 1 ее гиростабилизированная платформа с неортогонально расположенными на ней гравиметрами 2, 3 и 4 устанавливается по вертикали в направлении ускорения силы тяжести Земли. При этом физически гравиметры 2, 3 и 4 находятся на удалении L друг от друга и расположены по образующей конуса с полууглом при вершине α(0<α≤π/2).
Подключение гравиметров 2, 3 и 4 к входам 5, 6 и 7 вычислителя 9 вызывает гравиинерциальный режим работы фильтра Калмана 11, обеспечивающий соответственно демпфирование ошибок инерциальной системы 1 по скорости и вертикали. Одновременно подключаются спутниковая система навигации 23 и высотомер 26 к входам 24 и 25 вычислителя 9, которые вызывают координатный режим работы фильтра Калмана 11 для прецизионной оценки и коррекции ошибок инерциальной системы 1 по скорости, вертикали и высоте полета, а также оценивания и компенсаций их инструментальных погрешностей (акселерометров и гироскопов). На этом режим прецизионной (точной) коррекции инерциальной системы 1 заканчивается, вступает в работу бинарный фильтр 12 с блоком оценки надежности гравиизмерений 13. В результате достигается поставленная цель - повышение точности и надежности гравиинерциальных измерений на подвижном основании.
В самом деле, для бинарного фильтра 12 уравнение для неортогональных гравиметров согласно фиг. 1 можем записать в виде
где i=1, 2, 3 - первый, второй и третий гравиметры;
АN, Ае, Ан - ускорения объекта;
ΔGi - аномалии гравитационного поля Земли в местах расположения гравиметров;
mi - выходные сигналы гравиметров;
L - расстояние между гравиметрами;
N Е Н - географическая система координат.
В матричном виде соотношение (1) будет выглядеть следующим образом:
где сi=cos(2πi/3); si=sin(πi/3); i=1,2,3.
Пусть для простоты αN = αE = 0, αH ≠ 0, тогда согласно соотношению (2) запишем:
m1 = AHcosα+ΔG1;
m2 = AHcosα+ΔG2; (3)
m3 = AHcosα+ΔG3.
В предлагаемом неортогональном гравиизмерительном комплексе уравнения сравнений для бинарного фильтра 12 на основании уравнений (3) примут вид:
Δm1 = m1-m2 = ΔG1-ΔG2;
Δm2 = m1-m3 = ΔG1-ΔG3; (4)
Δm3 = m2-m3 = ΔG2-ΔG3.
Апроксимация выражений (4) может быть представлена в виде
где x=Vt;
V - скорость полета.
На основании (5) имеем:
где δmi - разность показаний гравиметров, расположенных в точках x+L и x, обусловленные углом α, - градиент аномальной части ΔGi.
- градиент аномальной части ΔGi.
Из (6) следует, что чем больше отношение L/V, тем чувствительность к  выше. Отношение L/V характеризует задержку времени, необходимую для перемещения одного гравиметра на точку на земной поверхности, в которой в данный момент находился другой гравиметр.
выше. Отношение L/V характеризует задержку времени, необходимую для перемещения одного гравиметра на точку на земной поверхности, в которой в данный момент находился другой гравиметр.
Анализ (6) свидетельствует о том, что для медленно движущихся объектов, например висение вертолета, наиболее предпочтителен для гравиизмерений.
Заметим также, что согласно (6) при L=0 эффект гравиизмерений пропадает, что отражает сущность неортогональных гравиизмерительных комплексов.
Следует также отметить, что неортогональность расположения трех гравиметров на гиростабилизированной платформе инерциальной навигационной системы позволяет проводить оценку надежности гравиизмерений, используя, например, алгоритм срединного значения или медиану [3].
Запишем выражения (6) с учетом инструментальных погрешностей измерения εi для разности показаний гравиметров в виде
Пусть, например, δm2 имеет наибольшую ошибку измерения (более порога |ε2|>|ε1|, |ε2|>|ε3|), тогда алгоритм срединного значения для блока оценки надежности примет вид
Анализ соотношения (8) показывает, что алгоритм срединного значения в блоке оценки надежности гравиизмерений позволяет исключить наихудшее измерение. При этом срединное значение отличается от наилучшей оценки не более чем на наибольшую ошибку в показаниях гравиметров, которые по определению является допустимыми (надежными).
Источники информации
1. Приборы для гравиинерциальных измерений, М.: Наука, 1978.
2. Патент РФ 2150132 от 27 мая 2000 г.
3. Journal Guedance, Control and Dynamics, 1986, т. 1, 1, рр 37-44.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 1998 |
|
RU2150132C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2018 |
|
RU2697474C1 |
| ВЕРТОЛЕТНЫЙ ГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2128851C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ (варианты) | 2021 |
|
RU2768998C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА НА КОРАБЛЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2673314C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
Изобретение относится к приборам для гравиинерциальных измерений. Неортогональный гравиизмерительный комплекс содержит инерциальную навигационную систему, спутниковую систему навигации, высотомер, вычислитель с фильтром Калмана и бинарным фильтром, накопитель информации, радиомодемный блок, блок стабилизации висения вертолета. На гиростабилизированной платформе инерциальной системы неортогонально установлены три и более гравиметров. Гравиметры расположены на расстоянии L друг от друга и расположены по образующей конуса с полууглом при вершине α. Вычислитель четырьмя выходами связан с выходами и соответствующими входами инерциальной системы, системы стабилизации висения вертолета и радиомодемного блока. Вычислитель включает в себя блок оценки надежности гравиизмерений. Технический результат состоит в повышении точности и надежности гравиинерционных измерений на подвижном основании. 1 з.п. ф-лы, 2 ил.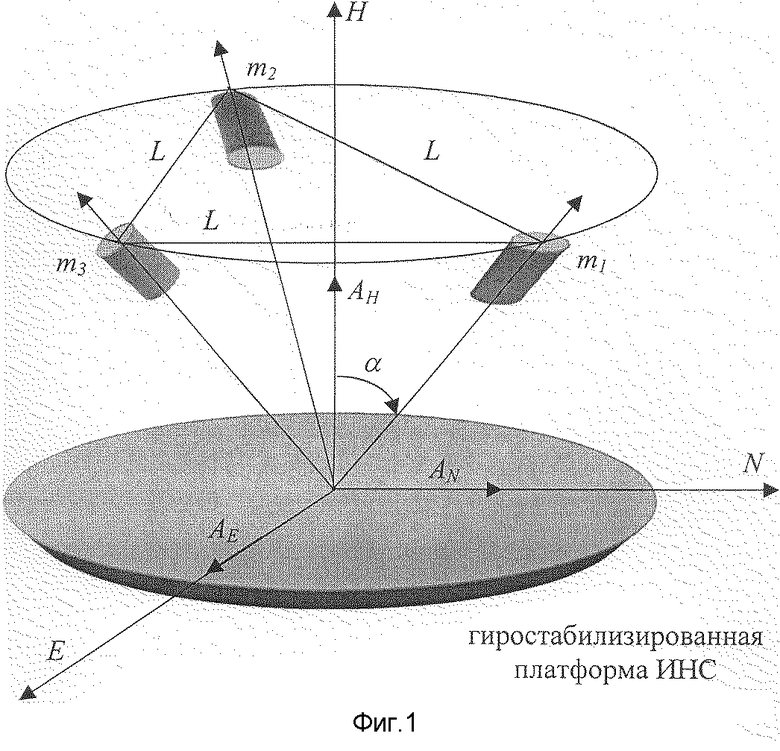
| ГРАВИИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 1998 |
|
RU2150132C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ СУХОПУТНЫХ НОСИТЕЛЕЙ В РЕЖИМЕ КРАТКОВРЕМЕННЫХ ОСТАНОВОК | 1993 |
|
RU2056641C1 |
| ВЕРТОЛЕТНЫЙ ГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2128851C1 |
| 0 |
|
SU153370A1 | |
| АНТИКОРРОЗИОННАЯ КОМПОЗИЦИЯ | 1997 |
|
RU2141984C1 |
| US 5924056 A, 13.07.1999. | |||

