Изобретение относится к области измерительной техники, а именно к высокоточным астроинерциальным навигационным системам, и может быть использовано в составе навигационных комплексов надводных кораблей, подводных лодок и автономных необитаемых подводных аппаратов.
Известна астроинерциальная навигационная система (RU 141801 U1, 13.12.2013), в состав которой входят:
бесплатформенная инерциальная навигационная система (БИНС), представляющая моноблок, содержащий лазерные гироскопы, акселерометры, встроенный навигационный приемник сигналов СНС ГЛОНАСС/GPS, блок питания, модуль процессора для обработки цифровой информации и выполнения вычислительных процессов в соответствии с рабочей программой, хранящейся во встроенном запоминающем устройстве (типа flash), обеспечивающий определение угловых параметров положения и решение навигационных задач;
астровизирующее устройство (АВУ), в состав которого входят звездный датчик, блок электроники, защитный корпус, солнечный датчик;
блок оптического сопряжения, в состав которого входят искусственный источник света, призма и фотоприемное устройство.
Звездный датчик, в свою очередь, состоит из: основания, узла ПЗС-матрицы, узла видеотракта, объектива со встроенным затвором, бленды. Блок электроники состоит из узла процессора и платы вторичного источника питания.
Недостатками указанного устройства являются ограниченная точность выходных параметров, обусловленная использованием в модуле процессора БИНС только расчетных картографических данных гравитационного поля Земли, а не фактических значений гравитационной составляющей ускорения силы тяжести. Кроме того, в условиях недостоверности сигналов СНС ГЛОНАСС/GPS и отсутствия видимости звезд, что характерно для работы морских и океанских кораблей в высоких широтах, эффективность астроинерциальных навигационных систем будет крайне низкой, поскольку прекращается работа основных корректирующих каналов - астровизирующего устройства и навигационного приемника сигналов СНС ГЛОНАСС/GPS.
Известна комбинированная бесплатформенная астроинерциальная навигационная система (RU 2654965 С1, 23.05.2018), содержащая систему определения корректирующих поправок бесплатформенной инерциальной навигационной системы и источники внешней информации, сигналы с которых используются в качестве входной информации для определения корректирующих поправок, причем, в качестве первого источника внешней информации применен источник астроинформации, включающий телеблок, установленный в рамках карданова подвеса, обеспечивающего выставку телеблока на заданные углы по азимуту и высоте, блок следящих систем отработки углов наведения визирной оси телеблока, бортовую ЦВМ, по целеуказаниям которой следящие системы отрабатывают эти углы, а также блок вычисления угловых поправок, причем, в качестве второго источника внешней информации применен источник скоростной и позиционной информации, а система определения корректирующих поправок бесплатформенной инерциальной навигационной системы выполнена трехступенчатой и включает последовательно подключенные блок определения позиционной ошибки, скоростной ошибки и ошибки построения вертикали, обеспечивающий на выходе первой ступени формирование горизонтальных проекций вектора кинематических ошибок системы, как результат визирования гипотетической звезды, находящейся в зените, входами связанный с бортовой ЦВМ и источником скоростной и позиционной информации, блок определения вертикальной проекции вектора кинематических ошибок системы, обеспечивающий на выходе второй ступени формирование вектора кинематических ошибок системы, и подключенный вторым входом к блоку вычисления угловых поправок, а также блок определения инструментальных ошибок системы, обеспечивающий на выходе третьей ступени формирование вектора некомпенсированных дрейфов системы на оси приборного трехгранника.
Недостатком указанного устройства является использование в качестве источников внешней информации только источника астроинформации и источника скоростной и позиционной информации, что без использования картографических данных гравитационного поля Земли снижает точность корректирующих поправок.
Известна автономная корректируемая инерциальная навигационная система (RU 2629658 С2, 30.08.2017), включающая спецвычислитель и содержащая блок карты рельефа местности, выход которого подключен к входу первого блока сравнения, блок дифференцирования, блок измерения высоты рельефа, датчики неинерциальных структур.
Наиболее близким техническим решением является астронавигационная система, установленная на летательном аппарате (Джанджгава Г.И., Августов Л.И. Навигация по геополям. М.: «Научтехлитиздат», 2018, и содержащая бесплатформенную инерциальную навигационную систему, включающую акселерометры, гироскопы, приемник спутниковой радионавигационной системы, навигационный вычислитель, астровизирующее устройство с вычислителем, определяющим угловые параметры визирования звезд, и подключенному к навигационному вычислителю бесплатформенной инерциальной навигационной системы, при этом выходы приемника спутниковой радионавигационной системы, гироскопов и акселерометров соединяют с входами навигационного вычислителя бесплатформенной инерциальной навигационной системы, в систему вводят гравиметры, блок высотомеров для измерения вертикального ускорения летательного аппарата, вычислитель ускорения силы тяжести и сумматоры, при этом гравиметры устанавливают на отдельной платформе, выполненной с возможностью синхронного перемещения с перемещением летательного аппарата и параллельно плоскости горизонта, причем выходы гравиметров и блока высотомеров для измерения вертикального ускорения летательного аппарата соединяют с входами вычислителя ускорения силы тяжести, выходы которого подключены через сумматоры к навигационному вычислителю бесплатформенной инерциальной навигационной системы, а выходы акселерометров соединяют с вторыми входами сумматоров.
Сигналы, получаемые на выходе гравиметров, содержат информацию как о величине ускорения силы тяжести, так и о величине ускорения движения ЛА. Для выделения сигналов ускорения силы тяжести необходимо введение дополнительных устройств для определения ускорения движения ЛА, выполненных, например, на основе радиовысотомеров, систем воздушных сигналов, СНС. Сигналы ускорения силы тяжести получают путем совместной обработки показаний гравиметров и ускорений собственного движения ЛА в одноименных осях, получаемых после дифференцирования показаний радиовысотомеров, либо систем воздушных сигналов или СНС. Выходы гравиметров и акселерометров в одноименных осях через сумматоры соединены с входами навигационного вычислителя БИНС и используются в блоках интегрирования для вычисления составляющих линейной скорости и координат ЛА:
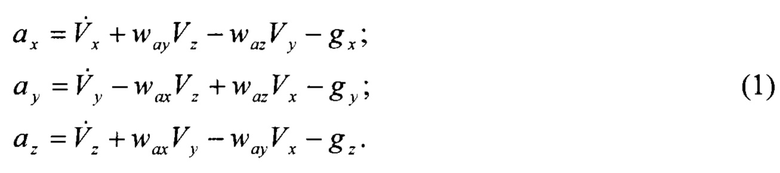
Здесь ax,ay,az. - показания акселерометров БИНС, сориентированных в соответствии с осями системы координат Qxyz, Vx,Vy,Vz - абсолютные линейные скорости ЛА, получаемые из решения уравнений (1) в соответствующих блоках навигационного вычислителя ЛА, gx, gy, gz - компоненты вектора ускорения силы тяжести, поступающие от гравиметров на выходах гравиметров с учетом ускорений собственного движения ЛА. wax way waz - проекции вектора абсолютной угловой скорости на оси х, у, z.
При этом необходимо согласование осей местного горизонта, определяемой в БИНС и блока гравиметров, которое осуществляют синхронно с помощью отдельной платформы, управляемой БИНС.
Недостатками данного устройства являются необходимость применения дополнительных устройств в составе астроинерциальной системы - систем воздушных сигналов, спутниковой навигационной системы, радиовысотомеров и т.д. -для определения ускорения силы тяжести путем совместной обработки показаний гравиметров и ускорений собственного движения ЛА в одноименных осях, получаемых после дифференцирования показаний радиовысотомеров, систем воздушных сигналов, спутниковой навигационной системы. Кроме того, совместное применение бесплатформенной инерциальной навигационной системы и блока гравиметров требует согласования осей и плоскости местного горизонта, определяемых БИНС и осей блока гравиметров, которое достигается с помощью отдельной горизонтируемой платформы, непрерывно управляемой выходными сигналами БИНС.
Технической задачей настоящего изобретения является повышение точности и автономности определения навигационных параметров - широты и долготы местоположения, а также снижения массогабаритных характеристик АИНС.
Для реализации поставленной задачи в астронавигационную систему, установленную на морском надводном или подводном корабле и содержащую основную корабельную бесплатформенную инерциальную навигационную систему, включающую акселерометры, гироскопы, приемник спутниковой радионавигационной системы, навигационный вычислитель, астровизирующее устройство с вычислителем, определяющее угловые параметры визирования звезд, и подключенное к навигационному вычислителю бесплатформенной инерциальной навигационной системы, вводят ротационный гравитационный вариометр, блок памяти с цифровой картой гравитационного поля Земли; модуль процессора для обработки цифровой информации о параметрах гравитационного поля Земли и выполнения вычислений по корреляционно-экстремальному алгоритму, обеспечивающему определение линейных скоростей и координат надводного или подводного корабля.
Как показано в прототипе, в основе работы астроинерциальных систем лежит взаимосвязь между различными системами координат (СК), используемыми в работе астроинерциальных систем. К таким системам координат относятся:
ECI - фундаментальная инерциальная СК эпохи J2000;
ECEF - геоцентрическая земная (гринвичская) СК;
ENU - топоцентрическая (местная географическая) СК;
BIMU - приборная СК БИНС (правая прямоугольная СК, оси которой связаны со строительными осями БИНС);
BST - приборная СК АВУ (правая прямоугольная СК, оси которой связаны с оптической осью и плоскостью ПЗС-матрицы АВУ).
Взаимосвязь между перечисленными СК математически удобно представлять в виде матричного уравнения, задающего переход от ECI к BST:

где  - матрица, характеризующая угловое положение BST относительно ECI;
- матрица, характеризующая угловое положение BST относительно ECI;
 - матрица привязки BIMU к BST, определяемая и стабилизируемая блоком оптического сопряжения на этапе технологической юстировки АИНС;
- матрица привязки BIMU к BST, определяемая и стабилизируемая блоком оптического сопряжения на этапе технологической юстировки АИНС;
 -матрицы переходов от ENU к BIMU от ECEF к ENU и от ECI к ECEF
-матрицы переходов от ENU к BIMU от ECEF к ENU и от ECI к ECEF
соответственно.
Матрицы  из состава уравнения (2) могут быть определены
из состава уравнения (2) могут быть определены
в следующем виде:

где 
матрицы элементарных поворотов на углы крена γ, дифферента ϑ и курса ψ соответственно; Rpol - матрица, учитывающая смещение положения полюса Земли в эпоху t (в текущий момент времени); RS - матрица учета суточного вращения Земли; N, P - матрицы нутации и прецессии Земли в эпоху t соответственно.
С учетом (3) и (4) уравнение (2) можно представить в виде соотношения

или

Основной информацией, поступающей от АВУ в БИНС, являются элементы матрицы ориентации  а параметры матриц
а параметры матриц  известны до начала работы АИНС.
известны до начала работы АИНС.
На основе представленных соотношений (2), (5) и (6) реализуются различные режимы (варианты) астрокоррекции БИНС, включаемые оператором вручную эпизодически при условии видимости небесных светил.
В отсутствие видимости светил единственный источник коррекции для устранения постоянно увеличивающегося ухода показаний БИНС может быть реализован только на основе сравнения текущих показаний датчика параметров гравитационного поля Земли с заранее составленной картой гравитационных аномалий с помощью алгоритмов соответствующей корреляционно-экстремальной навигационной системы (КЭНС).
В отечественной теории и практике алгоритмы КЭНС принято разделять на два класса - поисковые и беспоисковые. Принципиально оба типа алгоритмов оценивают одно и то же - величину вектора ошибок показаний базовой навигационной системы, в качестве которой обычно выступает БИНС. Вектор ошибок ε может включать в себя как ошибки определения только координат, так и ошибки определения координат и скорости. Оценка вектора ε производится исходя из сравнения текущих измерений параметров ГПЗ с ожидаемыми в соответствии с показаниями опорной навигационной системы (ИНС) на основе некоторого функционала близости:

где ε - оцениваемый вектор ошибок показаний опорной навигационной системы,
z - вектор текущих измерений параметров ГПЗ,
zm(ε)- ожидаемые измерения, формируемые в соответствии с моделью измерительной системы:

где,rнав и vнав собственно показания опорной БИНС (местоположение и скорость),
M(r) - эталонная карта ГПЗ.
Изобретение поясняется чертежом (фиг. 1), где изображена астронавигационная система с коррекцией по ГПЗ.
Астронавигационная система содержит БИНС 1 и АВУ 6, определяющее угловые параметры визирования звезд, выход которого соединен с одним из входов навигационного вычислителя БИНС 5, блок питания 4, навигационную аппаратуру потребителя спутниковой навигационной системы 11 (приемник спутниковых радионавигационной сигналов системы ГЛОНАСС/GPS) и блок сопряжения и принятия решения 12. БИНС 1 включает в свой состав блок кварцевых акселерометров 2, блок лазерных гироскопов 3 и вычислитель 5. Астронавигационная система также содержит корреляционно-экстремальную систему 10, которая включает в состав ротационный гравитационный вариометр 8, вычислитель корреляционно-экстремальной системы 7 для вычисления координат и составляющих скоростей корабля, при этом выход блока акселерометров 2 соединен с входом вычислителя БИНС 5, выход блока гироскопов 3 соединен с входом вычислителя БИНС 5, выход вычислителя БИНС 5 соединен с входом АВУ 6, выход вычислителя БИНС 5 соединен с входом вычислителя корреляционно-экстремальной навигационной системы 7, выход блока ротационных гравитационных вариометров 8 соединен с входом вычислителя корреляционно-экстремальной навигационной системы 7, выход блока памяти с цифровой картой гравитационного поля Земли 9 соединен с входом вычислителя корреляционно-экстремальной навигационной системы 7, выход вычислителя БИНС 5 соединен с входом ротационного гравитационного вариометра 8, выход АВУ соединен с входом блока сопряжения и принятия решений 12, выход навигационной аппаратуры потребителя спутниковой навигационной системы 11 соединен с входом блока сопряжения и принятия решений 12, выход вычислителя корреляционно-экстремальной навигационной системы 7 соединен с входом блока сопряжения и принятия решений 12, выход блока сопряжения и принятия решений 12 соединен с входом вычислителя БИНС 5.
Система работает следующим образом.
БИНС 1 обеспечивает определение навигационных параметров (координат и скорости) и углов ориентации, сопровождаемое с течением времени шулеровским накапливанием ошибок. С выхода БИНС на вход астровизирующего устройства 6 постоянно поступает априорная (нескорректированная) информация о пространственном положении оси АВУ и связанной с ней приборной системы координат АВУ в инерциальной системе координат.
В процессе обсервации звезд астровизирующим устройством изображения звезд проецируются на КМОП-матрицу, являющуюся чувствительным элементом АВУ.
Считывающее устройство АВУ фиксирует изображения звезд с КМОП-матрицы, одновременно осуществляя фильтрацию, выделение звездоподобных образований, их селекцию по конфигурационным и энергетическим признакам.
АВУ осуществляет поиск и распознавание выделенных объектов (звезд) на основе сравнения текущего изображения звездного неба и звездного каталога, хранящегося в блоке памяти АВУ (на схеме не показан).
Навигационный вычислитель АВУ (на схеме не показан) вычисляет параметры ориентации оптической оси астровизирующего устройства с учетом эпохи наблюдения, нутации и прецессии, аберрации и рефракции атмосферы. На основе параметров ориентации оптической оси астровизирующего устройства формируется матрица,  которая передается в навигационный вычислитель БИНС 5.
которая передается в навигационный вычислитель БИНС 5.
Имеется два режима (варианта) астрокоррекции:
1) режим компенсации погрешностей БИНС по определению геодезических координат и угла рыскания - астроинерциальный спутниковый режим.
2) режим компенсации погрешностей БИНС по определению углов пространственного положения - астроинерциальный режим;
Первый режим коррекции включается при наличии уверенного приема сигналов спутниковых навигационных систем ГЛОНАСС/GPS.
В случае отсутствия информации от приемника СНС 11 реализуется второй режим компенсации погрешностей БИНС 1 - компенсации погрешностей по определению геодезических координат и угла рыскания.
Основным режимом работы рассматриваемой навигационной системы является инерциальный режим, который включен непрерывно на протяжении всего движения корабля и функционирует вне зависимости от наличия условий для обсервации звезд и наличия приема сигналов от спутников в приемнике СНС. Режимы астрокоррекции и спутниковой коррекции являются дополнительными к инерциальному и включаются кратковременно.
Параллельно с БИНС непрерывно работает корреляционно-экстремальная навигационная система 10, функционирующая по гравитационному полю Земли. В состав КЭНС входят ротационный гравитационный вариометр 8, блок памяти с цифровой картой гравитационного поля Земли 9 и вычислитель КЭНС 7.
Точность коррекции от АВУ и точность коррекции от КЭНС существенно различаются (у КЭНС точность приблизительно в 3 раза ниже, чем у АВУ), при этом применение АВУ ограничено условиями видимости, а для КЭНС никаких ограничений по условиям применения нет. Поэтому необходимо включение в состав АИНС логического устройства, принимающего решение о выборе корректирующей системы - АВУ или КЭНС. Таким устройством в рассматриваемой АИНС является блок сопряжения и принятия решения 12.
Информация от КЭНС и АВУ поступает на блок сопряжения и принятия решения 12, который осуществляет анализ поступающих измерений от АВУ и КЭНС и вырабатывает три признака:
t = 0 - признак поступления измерений от АВУ;
t = 1 - частота обновления измерительной информации от АВУ и КЭНС;
t = 2 - длительность и разрешающая способность измерений КЭНС.
Признак t = 0 определяет принципиальную возможность поступления информации от АВУ.
Признак t = 1 анализирует частоту и последовательность обновления измерений АВУ. В том случае, если измерения единичные, то происходит одномоментная компенсация погрешностей БИНС. В случае, если измерения достаточно продолжительные, то в вычислителе БИНС 5 инициализируется астроинерциальный блок оценивания на основе фильтра Калмана.
Третий признак t = 2 определяет длительность и разрешающую способность измерений КЭНС.
Реализация алгоритмов оценивания в навигационном вычислителе БИНС 5 зависит от признаков t = 1, t = 2. В случае достаточно продолжительного поступления информации от АВУ и высокой разрешающей способности для астроинерциальной коррекции используется фильтр Калмана. При этом оценки углов ошибок ориентации, а также дрейфов гироскопов используются для компенсации погрешностей блока гироскопов 3 и блока акселерометров 2. В случае кратковременных измерений от АВУ используется простая компенсация ошибок ориентации и координат местоположения на выходе БИНС.
Данные рассуждения справедливы для использования алгоритмов оценивания по измерениям от КЭНС. Для алгоритмов оценивания, использующих информацию от КЭНС, реализуется редуцированный фильтр Калмана (фильтр Калмана-Шмидта) на основе следующей модели ошибок:

где w1, w2 - приведенные входные шумы, включающие в свой состав неоцениваемые составляющие вектора состояния;
N, Е - координаты ϕ, λ местоположения БИНС (объекта-носителя);
δνE, δνN - ошибки восточной и северной составляющих линейной скорости объекта.
В качестве измерений используются разницы показаний БИНС и КЭНС по координатам (горизонтальные каналы), то есть:

где ν1, ν2 - измерительные шумы, обусловленные ошибками КЭНС.
Данный алгоритм используется только в том случае, когда по признаку i = 2 измерения КЭНС является достаточно продолжительными и с достаточно высокой разрешающей способностью. Если появляется возможность кратковременных измерений от КЭНС, то происходит просто компенсация погрешностей на выходе БИНС по координатам.
Решение о возможности использования информации от приемника СНС принимается по стандартным процедурам определения целостности СНС, реализованных во всех современных НАП СНС.
Таким образом, технический результат настоящего изобретения - повышение точности и автономности определения навигационных параметров, а также снижение массогабаритных характеристик АИНС, - может считаться достигнутым за счет:
реализации в составе АИНС КЭНС, которая является полностью автономной и обеспечивающей работу АИНС в любых географических, погодных и суточных условиях;
введения в состав АИНС ротационного гравитационного вариометра. Сигналы, получаемые на выходе ротационных гравитационных вариометров, не содержат информации о величине ускорения собственного движения ЛА. Для выделения сигналов о величине ускорения силы тяжести не требуется наличия радиовысотомеров, систем воздушных сигналов. Кроме того, при измерении ускорения силы тяжести на основе измерений ротационным гравитационным вариометром не требуется горизонтирования ротационного гравитационного вариометра, который производит измерения в осях, согласованных с осями БИНС за счет механического сопряжения осей БИНС и осей ротационного гравитационного вариометра. Это позволяет снизить массогабаритные характеристики АИНС.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |

Изобретение относится к области измерительной техники, а именно к высокоточным астроинерциальным навигационным системам, и может быть использовано в составе навигационных комплексов надводных кораблей, подводных лодок и автономных необитаемых подводных аппаратов. Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли содержит бесплатформенную инерциальную навигационную систему, включающую блок акселерометров, блок гироскопов, вычислитель бесплатформенной инерциальной навигационной системы; блок электроники, включающий блок питания и блок сопряжения и принятия решений; навигационную аппаратуру потребителя спутниковой навигационной системы; астровизирующее устройство; гравитационную корреляционно-экстремальную навигационную систему, включающую вычислитель корреляционно-экстремальной навигационной системы, ротационный гравитационный вариометр и блок памяти с цифровой картой гравитационного поля Земли. Технический результат – повышение точности и автономности определения навигационных параметров. 1 ил.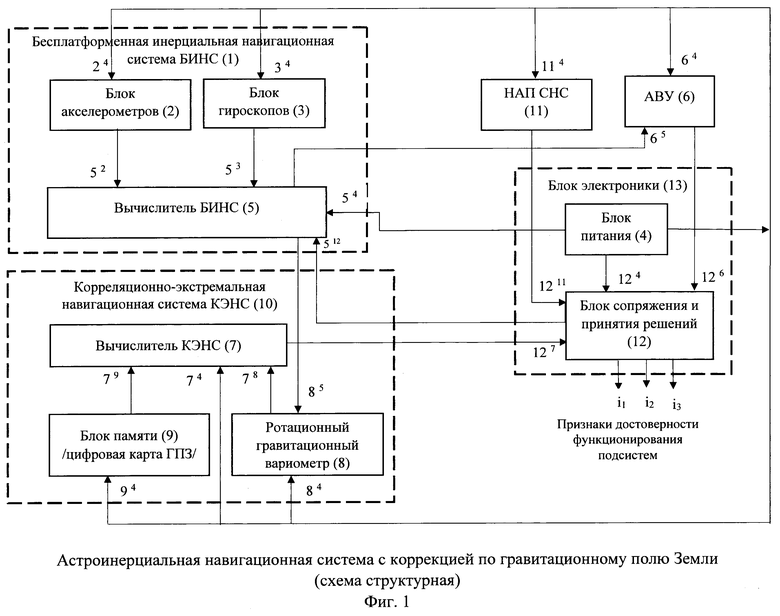
Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли, содержащая бесплатформенную инерциальную навигационную систему, положение корпуса которой согласовано со строительными осями объекта навигации, и включающую блок акселерометров, блок гироскопов, вычислитель бесплатформенной инерциальной навигационной системы; блок питания; навигационную аппаратуру потребителя спутниковой навигационной системы; астровизирующее устройство, на входе которого установлен объектив со встроенным затвором и блендой, объектив жестко закреплен по оси с чувствительным элементом и заключен в защитный корпус, при этом выход блока акселерометров соединен с входом вычислителя бесплатформенной инерциальной навигационной системы, выход блока гироскопов соединен с входом вычислителя бесплатформенной инерциальной навигационной системы, выход вычислителя бесплатформенной инерциальной навигационной системы соединен с входом астровизирующего устройства, отличающаяся тем, что в астроинерциальную навигационную систему включены гравитационная корреляционно-экстремальная навигационная система, включающая вычислитель корреляционно-экстремальной навигационной системы, ротационный гравитационный вариометр и блок памяти с цифровой картой гравитационного поля Земли; блок сопряжения и принятия решений, при этом оси ротационного гравитационного вариометра механически сопряжены с осями бесплатформенной инерциальной навигационной системы, выход вычислителя бесплатформенной инерциальной навигационной системы соединен с входом вычислителя корреляционно-экстремальной навигационной системы, выход ротационного гравитационного вариометра соединен с входом вычислителя корреляционно-экстремальной навигационной системы, выход блока памяти с цифровой картой гравитационного поля Земли соединен с входом вычислителя корреляционно-экстремальной навигационной системы, выход вычислителя бесплатформенной инерциальной навигационной системы соединен с входом ротационного гравитационного вариометра, выход астровизирующего устройства соединен с входом блока сопряжения и принятия решений, выход навигационной аппаратуры потребителя спутниковой навигационной системы соединен с входом блока сопряжения и принятия решений, выход вычислителя корреляционно-экстремальной навигационной системы соединен с входом блока сопряжения и принятия решений, выход блока сопряжения и принятия решений соединен с входом вычислителя бесплатформенной инерциальной навигационной системы.
| АВТОНОМНАЯ КОРРЕКТИРУЕМАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2629658C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
| US 9702702 B1, 11.07.2017 | |||
| US 7376507 B1, 20.05.2008. | |||

