Изобретение относится к системам обнаружения и сопровождения целей в радиолокационных комплексах (РЛК) воздушного, наземного и морского базирования различного назначения.
Ранжирование целей по степени их важности (опасности) является одним из основных этапов их автоматического сопровождения в режиме обзора (АСЦРО). Важность этого этапа обусловлена тем, что количество средств поражения на борту истребителя, в общем случае, меньше количества одновременно сопровождаемых целей. В связи с этим возникает проблема установления очередности применения средств поражения по сопровождаемым целям, от решения которой напрямую зависит не только возможность их поражения, но и собственная безопасность.
Обычно очередность применения средств поражения при АСЦРО устанавливается по критерию обеспечения максимума собственной безопасности. Одним из самых распространенных разновидностей такого критерия является минимум подлетного времени tп, оставшегося до встречи с целью [1, стр. 92] (прототип). В соответствии с этим критерием наиболее опасной считается цель, для которой имеет место минимальная величина [1, стр, 92]
tпj=Дj/Vсбj=min, (1)
где Дj, и Vсбj - соответственно дальность до j-й сопровождаемой цели и скорость сближения с ней. Соотношение (1) вычисляется для всех J сопровождаемых целей, которые ранжируются по мере роста tпj.
Одним из существенных недостатков способа (1) является невозможность учета специфики используемого метода наведения, что приводит к недостоверному определению наиболее опасной цели. Например, при наведении истребителя по любому из разновидностей метода наведения в упрежденную точку встречи [2, стр. 169-174], а ракеты "воздух - воздух" по любому из разновидностей метода пропорционального наведения [2, стр.178-182] использование критерия (1) до 50% случаев не гарантирует определение наиболее опасной цели. Это утверждение поясняется фиг. 1. На фиг. 1 показаны два возможных направления движения цели, находящейся в точке Оц, которые характеризуются скоростями Vц1, Vц2 и углами ϕц1 и ϕц2 соответственно. Пусть по отношению к истребителю, движущемуся из точки Ои со скоростью Vи под утлом ϕи к линии ОиОц визирования, скорости цели в обоих направлениях равны (Vц1= Vц2=Vц), а угол ϕц1>ϕц2. Из геометрических соотношений фиг. 1 можно найти, что
а следовательно, подлетное время tп2=Д/Vсб2<tп1=Д/Vсб1. Согласно (1) будет принято решение, что наиболее опасной является цель, движущаяся по направлению Vц2. Однако из рассмотренного примера видно, что опасной для истребителя является лишь ситуация, когда цель движется со скоростью Vц1 под углом ϕц1, в то время как движение со скоростью Vц2 под углом ϕц2 практически безопасно. Из приведенного примера видно, что целераспределение по правилу (1) не всегда соответствует правильному выбору наиболее опасной цели.
Другим, не менее существенным недостатком прототипа, является то, что по критерию (1) невозможно определить наиболее выгодную для уничтожения цель, применение по которой имеющихся на борту истребителя средств поражения обеспечит наибольшую вероятность ее поражения. Это утверждение основывается на том, что в (1) не учитываются тип цели, имеющиеся на истребителе средства поражения и их характеристики.
Таким образом, задачей изобретения является повышение достоверности определения наиболее опасной цели и одновременно цели, для которой в текущей ситуации обеспечиваются наиболее благоприятные условия для ее поражения в условиях ограничений, связанных с составом и возможностями бортового оборудования истребителя и цели и их вооружения.
Поставленная задача достигается тем, что в известном способе, заключающемся в том, что излучают зондирующие сигналы, принимают отраженные от целей сигналы, оценивают дальности до сопровождаемых целей и скорости сближения с ними и определяют наиболее опасную цель, для которой имеет место минимальная величина отношения текущей дальности до цели к величине скорости сближения с ней, остальные цели ранжируют по мере возрастания отношения текущей дальности до цели к величине скорости сближения с ней, до начала и в процессе сопровождения целей определяют априорные параметры и их производные, характеризующие наибольшую степень опасности сопровождаемых целей, априорные параметры и их производные, благоприятствующие нападению на сопровождаемые цели, весовые коэффициенты факторов опасности целей, весовые коэффициенты факторов благоприятствующих нападению и весовые коэффициенты важности используемых параметров, в процессе сопровождения целей принимают, наряду с отраженными сигналами, излученные целями сигналы, оценивают угловые координаты целей и их производные, по которым, наряду с оцененными значениями дальностей до сопровождаемых целей, скоростей и ускорений сближения с ними, определяют текущие параметры сопровождаемых целей и их производные, характеризующие степень опасности сопровождаемых целей, и текущие параметры и их производные, благоприятствующие нападению на сопровождаемые цели, умножают квадраты разностей априорных и текущих параметров, характеризующих степень опасности сопровождаемых целей, на весовые коэффициенты важности используемых параметров, умножают разности производных априорных и текущих параметров, характеризующих степень опасности сопровождаемых целей, на весовые коэффициенты важности этих параметров и временной интервал между измерениями, умножают сумму полученных произведений на весовой коэффициент факторов опасности целей и складывают с суммой произведений, характеризующей степень выгодности поражения целей, полученной в результате перемножения весового коэффициента факторов, благоприятствующих нападению, на сумму квадратов разностей априорных и текущих параметров, благоприятствующих нападению, с весовыми коэффициентами важности используемых параметров и разностей производных априорных и текущих параметров, благоприятствующих нападению, с весовыми коэффициентами важности этих параметров, умноженными на временной интервал между измерениями, по минимуму полученной суммы определяют наиболее важную для поражения цель, остальные цели ранжируют по мере возрастания указанной суммы.
В математическом плане способ ранжирования целей можно представить в следующем виде. Определяют квадратично-линейный функционал, в составе которого одновременно учитывают как параметры, свидетельствующие об опасности цели, так и параметры, благоприятствующие нападению на нее. В соответствии с этим функционалом наиболее важной для поражения считают цель, для которой обеспечивается его минимум
Здесь I3 - слагаемое, определяющее факторы опасности цели, которые необходимо учитывать для обеспечения собственной защиты,
Iн - слагаемое, определяющее факторы, благоприятные для нападения на эту цель; - номер цели;
- номер цели;
αз и αн - весовые коэффициенты факторов опасности целей и факторов, благоприятствующих нападению, которые определяют по результатам идентификации типа цели, причем αз+αн = 1; - соответственно априорное значение того или иного параметра, характеризующее наибольшую степень опасности для нас j-й цели, и его текущее значение;
- соответственно априорное значение того или иного параметра, характеризующее наибольшую степень опасности для нас j-й цели, и его текущее значение; - значения производных этих параметров;
- значения производных этих параметров;
qmз1 и qmз2 - весовые коэффициенты, учитывающие важность параметров 
 - наиболее благоприятные и текущие значения параметров и их производные соответственно, которые учитывают обстоятельства, способствующие нападению на j-ю цель;
- наиболее благоприятные и текущие значения параметров и их производные соответственно, которые учитывают обстоятельства, способствующие нападению на j-ю цель;
qnн1 и qnн2 - весовые коэффициенты, учитывающие важность параметров 
М и N - количество учитываемых параметров;
Т - временной интервал между измерениями фазовых координат.
Остальные цели ранжируют по степени убывания важности (по мере возрастания функционала (3)).
Если идентифицированная цель имеет лучшие летно-технические характеристики и показатели вооружения, то в функционале (3) большую роль в его минимизации играет слагаемое Iз (αз<αн), учитывающее требование обеспечения собственной защиты. В противном случае, большую роль в минимизации играет слагаемое Iн (αз>αн), которое характеризует возможность нападения.
В соответствии с заявленным способом ранжирование целей по степени их важности осуществляют следующим образом. Излучают зондирующие сигналы и принимают их радиолокационной станцией (РЛС). На основе принятых отраженных от различных целей сигналов определяют дальности до этих целей, скорости сближения с ними, угловые координаты целей и их производные Кроме того, с помощью станции радиотехнической разведки (РТР) и станции предупреждения об облучении (СПО) определяют такие данные, как тип цели (истребитель, бомбардировщик и др.) и режимы работы бортового оборудования цели (РЛС цели функционирует в режиме обзора пространства, РЛС цели - в режиме сопровождения и т.п.). На основе полученной информации о текущих координатах целей и данных о них определяют ряд текущих параметров целей (например, направление полета цели, текущее подлетное время, текущий промах и др.), характеризующих степень опасности той или иной цели для истребителя. Полученные текущие параметры целей сравнивают с вычисленными в процессе сопровождения целей или с заранее определенными и введенными в запоминающее устройство (ЗУ) наиболее опасными аналогичными параметрами целей. Если текущие параметры какой-то цели в совокупности будут ближе к наиболее опасным, то эта цель и будет определена как наиболее опасная для истребителя. Кроме этого, на основе текущих координат целей и данных о них вычисляют текущие параметры целей (например, скорость сближения, текущий угол упреждения и др.), благоприятствующие нападению на нее. На основе сравнения этих параметров целей с соответствующими априорными параметрами, определяющими наиболее благоприятные условия для нападения, находят наиболее выгодную для нападения цель: наиболее выгодной для нападения считается цель, для которой в совокупности разности текущих параметров и аналогичных априорных параметров будут минимальны. Затем с заданными весами, зависящими от типа цели, оба показателя целей (опасности и выгодности) складывают. Эти суммы, полученные для каждой сопровождаемой цели, сравнивают между собой. Ту цель, у которой указанная сумма будет минимальна, и определяют наиболее важной для уничтожения (одновременно важной и с точки зрения ее опасности и с точки зрения наиболее высокой вероятности ее уничтожения). Остальные цели ранжируют по мере возрастания указанной выше суммы.
Перейдем к рассмотрению устройства ранжирования целей, связанного единым изобретательским замыслом с вышеописанным способом ранжирования целей.
Из известных технических решений наиболее близким по своей технической сущности является устройство ранжирования целей [2, стр. 314-315, 340] (прототип).
Главным недостатком этого устройства является невозможность определения одновременно наиболее опасной для истребителя цели и цели, для которой в текущей ситуации обеспечиваются наиболее благоприятные условия для ее поражения. Это связано с тем, что в [2] при принятии решения о степени опасности целей, во-первых, не учитывается специфика методов наведения, во-вторых, не используется имеющаяся на борту истребителя информация о сопровождаемых целях, что не позволяет определить наиболее выгодную для уничтожения цель.
Таким образом, задачей изобретения является повышение достоверности определения наиболее опасной цели и одновременно цели, для которой в текущей ситуации обеспечиваются наиболее благоприятные условия для ее поражения в условиях ограничений, связанных с составом и возможностями бортового оборудования истребителя и цели и их вооружения.
Поставленная задача достигается тем, что в устройство ранжирования целей, содержащее антенную систему, измерители бортовой радиолокационной станции (БРЛС), идентификатор и фильтр сопровождения, обнаружитель новой цели, блок ранжирования целей, содержащий ЗУ и субблок определения наиболее опасной цели, обнаружитель маневра, цифровую вычислительную машину (ЦВМ) управления лучом антенны, устройство программирования сигнала подсвета цели (СПЦ), бортовую цифровую вычислительную систему (БЦВС), автономные датчики и потребители информации, дополнительно введены в состав автономных датчиков станция радиотехнической разведки, станция предупреждения об облучении и датчики углов атаки и крена, выход которых соединен с блоком ранжирования целей, в состав блока ранжирования целей - субблок определения наиболее выгодной цели для применения по ней оружия, два перемножителя и сумматор, выход БЦВС соединен с блоком ранжирования целей, а в блок ранжирования целей введены сигналы угловых координат целей и их производных из фильтра сопровождения.
На фиг. 2 изображена схема устройства ранжирования целей, где:
1 - потребители информации;
2 - антенная система;
3 - измерители БРЛС;
4 - идентификатор и фильтр сопровождения;
5 - автономные датчики;
6 - анализатор типа цели;
7 - ЦВМ управления лучом антенны;
8 - БЦВС;
9 - обнаружитель новой цели;
10 - блок ранжирования целей;
11 - обнаружитель маневра;
12 - устройство программирования СПЦ.
На фиг.3 изображена блок-схема блока ранжирования целей 10, где:
13 - запоминающее устройство;
14 - первый субблок - определения наиболее опасной цели;
15 - первый перемножитель;
16 - первый сумматор;
17 - второй субблок - определения наиболее выгодной цели для применений по ней оружия;
18 - второй перемножитель.
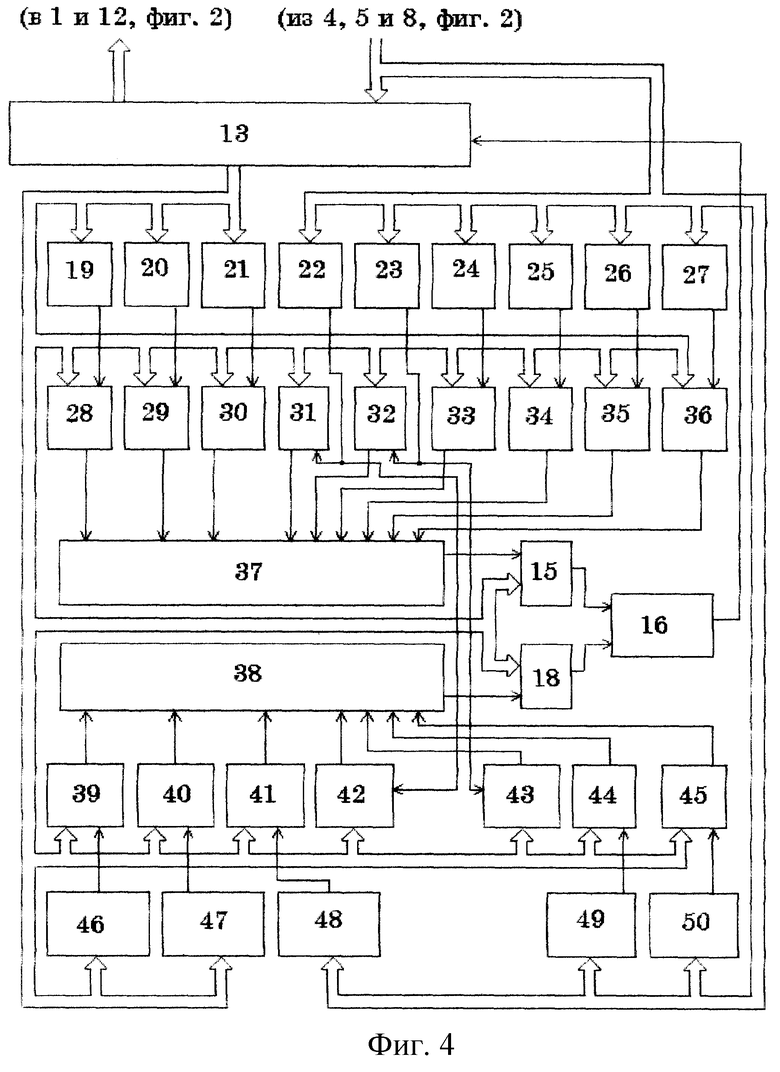
На фиг. 4 дана функциональная схема блока ранжирования целей, элементы которой будут пояснены ниже.
Запоминающее устройство 13 предназначено для хранения априорных параметров (Smjз, Snjн), их производных  и весовых коэффициентов (qmз1, qmз2, qnн1 и qnн2), которые вводят перед полетом в виде массива чисел, а также значений степени опасности целей и степени выгодности применения по ним оружия, вычисленных соответственно в первом 14 и втором 17 субблоках в процессе сопровождения. Значения степени опасности целей и степени выгодности применения по ним оружия вычисляют на основе текущих фазовых координат целей, данных о типах сопровождаемых целей и режимах работы их бортового оборудования. Текущие координаты целей определяют в идентификаторе и фильтре сопровождения 4 на основе принятых антенной системой 2 отраженных от целей сигналов и обработанных в измерителях БРЛС 3. Данные о типах сопровождаемых целей и режимах работы их бортового оборудования выдают автономные датчики 5. Значения степеней опасности и выгодности каждой цели, умноженные соответственно в первом 15 и втором 18 перемножителях на весовые коэффициенты важности этих степеней, складывают в первом сумматоре 16 и запоминают в ЗУ 13. Запомненные суммы, определяющие одновременно степень опасности каждой цели и выгодности применения по ней оружия, сравнивают между собой. Ту цель, для которой указанная сумма будет минимальна, определяют наиболее выгодной для поражения; остальные цели ранжируют по мере возрастания указанной суммы.
и весовых коэффициентов (qmз1, qmз2, qnн1 и qnн2), которые вводят перед полетом в виде массива чисел, а также значений степени опасности целей и степени выгодности применения по ним оружия, вычисленных соответственно в первом 14 и втором 17 субблоках в процессе сопровождения. Значения степени опасности целей и степени выгодности применения по ним оружия вычисляют на основе текущих фазовых координат целей, данных о типах сопровождаемых целей и режимах работы их бортового оборудования. Текущие координаты целей определяют в идентификаторе и фильтре сопровождения 4 на основе принятых антенной системой 2 отраженных от целей сигналов и обработанных в измерителях БРЛС 3. Данные о типах сопровождаемых целей и режимах работы их бортового оборудования выдают автономные датчики 5. Значения степеней опасности и выгодности каждой цели, умноженные соответственно в первом 15 и втором 18 перемножителях на весовые коэффициенты важности этих степеней, складывают в первом сумматоре 16 и запоминают в ЗУ 13. Запомненные суммы, определяющие одновременно степень опасности каждой цели и выгодности применения по ней оружия, сравнивают между собой. Ту цель, для которой указанная сумма будет минимальна, определяют наиболее выгодной для поражения; остальные цели ранжируют по мере возрастания указанной суммы.
Заявляемое устройство работает следующим образом/ Передающее устройство, входящее в состав измерителей БРЛС 3, на основе сигналов управления с устройства программирования СПЦ 12 формирует зондирующие сигналы, которые через антенную систему 2 излучают в определенную ЦВМ управления лучом антенны 7 область пространства. Отраженные от целей сигналы принимают антенной системой 2, которая осуществляет их пространственную селекцию, и подают на вход измерителей БРЛС 3, где производят выделение сигналов, отраженных от целей на фоне шумов, их усиление и формирование первичных измерений дальности, скорости сближения и угловых координат целей. С выхода измерителей БРЛС 3 сигналы подают на идентификатор и фильтр сопровождения 4, где осуществляют идентификацию принятых сигналов и формирование оценок фазовых координат целей: дальностей до целей, скоростей и ускорений сближения с ними, угловых координат целей и их производных в горизонтальной и вертикальной плоскостях. С выхода идентификатора и фильтра сопровождения 4 оцененные значения фазовых координат целей подают в БЦВС 8 и анализатор типа цели 6, в состав которого входят обнаружитель новой цели 9, блок ранжирования целей 10 и обнаружитель маневра 11. В обнаружителе новой цели 9 определяют принадлежность оцененных фазовых координат к новой или уже сопровождаемой цели. В обнаружителе маневра 11 определяют принадлежность фазовых координат к маневрирующей или неманеврирующей цели. В БЦВС 8 на основе оцененных значений фазовых координат целей вычисляют ракурс каждой сопровождаемой цели, признак движения цели на истребитель (или от него) и признак попадания (или непопадания) j-й цели в зону возможного применения по ней оружия, которые вводят в блок ранжирования целей 10. В этот же блок с автономных датчиков 5 вводят данные о типе j-й цели, о видах сигналов РЛС j-й цели, о режимах работы РЛС этих целей, о текущих углах атаки и крена истребителя. В блоке ранжирования целей 10 на основе всех полученных данных и введенных в ЗУ 13 априорных параметров и их производных, определяющих наибольшую степень опасности сопровождаемых целей и наиболее благоприятные условия для применения по сопровождаемым целям оружия, в субблоках 14 и 17 вычисляют соответственно значения степени опасности для истребителя каждой сопровождаемой цели и степени выгодности применения по каждой цели оружия. Вычисленные значения степеней опасности целей и выгодности применения по ним оружия умножают в первом 15 и втором 18 перемножителях соответственно на весовые коэффициенты важности этих значений, вводимых из ЗУ 13, и складывают в первом сумматоре 16. Сформированные таким образом суммы, отражающие одновременно степень опасности каждой цели и выгодности применения по ней оружия, подают в ЗУ 13, и запоминают на время, определяемое моментом окончания периода обзора пространства. В конце каждого периода обзора пространства все запомненные суммы ранжируют в ЗУ 13, начиная с минимальной и далее по мере увеличения их значений. Ту цель, для которой указанная сумма будет минимальна, определяют наиболее важной для поражения. Остальные цели ранжируют в соответствии с возрастанием вычисленной суммы и в таком виде передают потребителям информации 1, в роли которых выступают средства поражения и система управления истребителем. По данным, поступающим из идентификатора и фильтра сопровождения 4, автономных датчиков 5 и анализатора типа цели 6, устройство программирования СПЦ 12 управляет передающим устройством и ЦВМ управления лучом 7 для формирования зондирующих сигналов в следующем периоде работы БРЛС и выставления луча антенной системы 2 в определенную область пространства.
В изобретении ранжирование целей по степени их важности в блоке ранжирования целей 10 предлагается осуществлять с учетом:
- признака типа цели (поступающего от станции РТР, 5 фиг.2);
- признака облучения истребителя сигналом радиолокационной станции j-й цели (поступающего от СПО, 5);
- признака вида сигнала облучения, позволяющего судить об этапе подготовки к атаке j-й цели (поступающего от станции РТР, 5);
- признака движения j-й цели на истребитель (от истребителя) (поступающего от БЦВС 8);
- времени подлета tп (1), применяемого в существующих системах (вычисляется в 14);
- производной подлетного времени  (вычисляется в 14);
(вычисляется в 14);
- текущего промаха ht [2, стр. 183] j-й цели и его производной  в горизонтальной и вертикальной плоскостях наведения истребителя (вычисляется в 14);
в горизонтальной и вертикальной плоскостях наведения истребителя (вычисляется в 14);
- признака попадания цели в зону применения оружия (поступающего от БЦВС 8);
- ракурса цели (поступающего от БЦВС 8);
- скорости сближения j-й цели (оценивается в 4);
- углов упреждения (qг = ϕc+αsinγ, qв = ϕв+αcosγ, [2, стр.173], где α и γ - углы атаки и крена) в горизонтальной и вертикальной плоскостях наведения, обеспечивающих истребителю попадание в наивыгоднейшую упрежденную точку встречи с j-й целью (вычисляется в 17).
При использовании перечисленной выше информации в (3)-(5) алгоритм функционирования устройства ранжирования целей имеет следующий вид: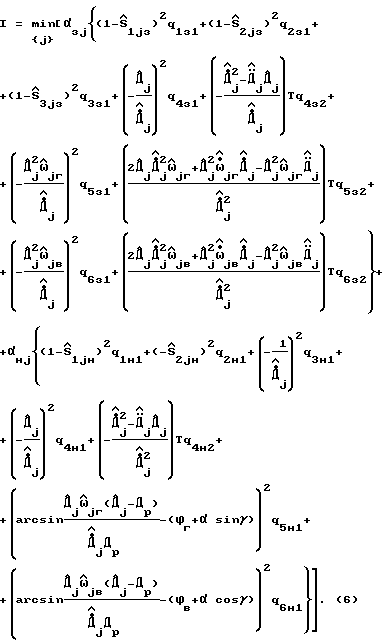
В (6) обозначено: - массивы весовых коэффициентов, вводимые перед полетом в ЗУ 13. Конкретные значения αзj и αнj выбираются из ЗУ в процессе сопровождения целей при получении признака типа цели от станции РТР (5, фиг. 2);
- массивы весовых коэффициентов, вводимые перед полетом в ЗУ 13. Конкретные значения αзj и αнj выбираются из ЗУ в процессе сопровождения целей при получении признака типа цели от станции РТР (5, фиг. 2); - массивы фиксированных значений весовых коэффициентов, вводимые перед полетом в ЗУ 13;
- массивы фиксированных значений весовых коэффициентов, вводимые перед полетом в ЗУ 13;
3) разность
характеризует степень опасности j-й цели в зависимости от наличия (или отсутствия) облучения истребителя от PЛC j-й цели. Если в процессе полета от СПО (5, фиг. 2) поступит признак, что РЛС j-й цели облучает истребитель, то параметр  При отсутствии облучения -
При отсутствии облучения -
4) разность
характеризует степень опасности j-й цели в зависимости от признака вида сигнала облучения, позволяющего судить об этапе подготовки к атаке j-й цели. Если в процессе полета от СПО (5, фиг. 2) поступит признак, что РЛС j-й цели перешла на этап подготовки к атаке, то  При отсутствии этого признака -
При отсутствии этого признака - 
5) разность
характеризует степень опасности j-й цели в зависимости от направления движения цели. В процессе полета на основе оцененных значений скорости сближения, угловых координат цели и собственной скорости истребителя в БЦВС 8 вычисляется вектор скорости j-й цели и в виде признака движения цели "к нам" ("от нас") поступает в субблок определения наиболее опасной цели 14. Если сформирован признак движения цели "к нам", то  В противном случае -
В противном случае - 
6) разности

характеризуют степень опасности j-й цели в зависимости от текущего значения подлетного времени
и его производной
вычисляемых в субблоке определения наиболее опасной цели 14, где  - оценки дальности, скорости сближения и ускорения, формируемые в фильтрах сопровождения 4, Т - временной интервал между измерениями фазовых координат;
- оценки дальности, скорости сближения и ускорения, формируемые в фильтрах сопровождения 4, Т - временной интервал между измерениями фазовых координат;
7) разности
характеризуют степень опасности j-й цели в зависимости от текущего значения промаха  [2, стр.183] в горизонтальной и вертикальной плоскостях и его производной
[2, стр.183] в горизонтальной и вертикальной плоскостях и его производной
вычисляемых в субблоке определения наиболее опасной цели 14, где индексы "г" и "в" учитывают принадлежность к горизонтальной и вертикальной плоскостям наведения, ω - угловая скорость линии визирования цели (линии ОиОц, фиг.1);
8) разность
характеризует степень благоприятности нападения на j-ю цель в зависимости от попадания ее в зону применения оружия. Если в процессе сопровождения цель попадает в зону применения по ней имеющегося оружия, то из БЦВС 8 выдается признак "цель в зоне возможных пусков", тогда параметр  в противном случае
в противном случае 
9) разность
характеризует степень благоприятности нападения на j-ю цель в зависимости от ракурса цели. В процессе сопровождения в БЦВС 8 оценивается ракурс цели  который передается в субблок определения наиболее выгодной цели для применения по ней оружия 17;
который передается в субблок определения наиболее выгодной цели для применения по ней оружия 17;
10) разность
вычисляемая во втором субблоке 17, характеризует степень благоприятности нападения на j-ю цель в зависимости от текущего значения скорости сближения истребителя c j-й целью;
11) разности
характеризуют степень благоприятности нападения на j-ю цель в зависимости от текущего значения подлетного до нее времени
и его производной
вычисляемые во втором субблоке 17;
12) разность
характеризует степень благоприятности нападения на j-ю цель в зависимости от разности значений требуемого
и текущего qг = (ϕг+αsinγ) углов упреждения [2, стр.172, 173] в горизонтальной плоскости, вычисляемых во втором субблоке 17, где Др - баллистическая дальность применяемых на истребителе ракет;
13) разность
характеризует степень благоприятности нападения на j-ю цель в зависимости от разности значений требуемого
и текущего qв = (ϕв+αcosγ) углов упреждения [2, стр. 172, 173] в вертикальной плоскости, вычисляемых во втором субблоке 17.
На фиг. 4 в соответствии с (6)-(22) представлена схема блока ранжирования целей, содержащего
13 - запоминающее устройство;
19 - первый вычислитель (степени опасности цели при наличии (отсутствии) облучения истребителя от РЛС цели), вычисляющий квадрат разности (7);
20 - второй вычислитель (степени опасности цели при наличии признака вида сигнала облучения), вычисляющий квадрат разности (8);
21 - третий вычислитель (степени опасности цели в зависимости от направления движения цели), вычисляющий квадрат разности (9);
22 - четвертый вычислитель (степени опасности цели в зависимости от текущего значения подлетного времени), вычисляющий квадрат разности (10);
23 - пятый вычислитель (степени опасности цеди в зависимости от текущего значения производной подлетного времени), вычисляющий разность (11);
24 - шестой вычислитель (степени опасности цели в зависимости от текущего значения промаха в горизонтальной плоскости), вычисляющий квадрат разности (12);
25 - седьмой вычислитель (степени опасности цели в зависимости от текущего значения производной промаха в горизонтальной плоскости), вычисляющий произведение (13);
26 - восьмой вычислитель (степени опасности цели в зависимости от текущего значения промаха в вертикальной плоскости), вычисляющий квадрат разности (14);
27 - девятый вычислитель (степени опасности цели в зависимости от текущего значения производной промаха в вертикальной плоскости), вычисляющий произведение (15);
28 - 36 - третий - одиннадцатый перемножители соответственно;
37 - второй сумматор;
38 - третий сумматор;
39 - 45 - двенадцатый - восемнадцатый перемножители соответственно;
46 - десятый вычислитель (степени благоприятности нападения на цель при попадании цели в зону применения по ней оружия), вычисляющий квадрат разности (16);
47 - одиннадцатый вычислитель (степени благоприятности нападения на цель в зависимости от ракурса цели), вычисляющий квадрат разности (17),
48 - двенадцатый вычислитель (степени благоприятности нападения на цель в зависимости от текущего значения скорости сближения истребителя с целью), вычисляющий квадрат разности (18);
49 - тринадцатый вычислитель (степени благоприятности нападения на цель в зависимости от текущего угла упреждения в горизонтальной плоскости), вычисляющий квадрат разности (21).
50 - четырнадцатый вычислитель (степени благоприятности нападения на цель в зависимости от текущего угла упреждения в вертикальной плоскости), вычисляющий квадрат разности (22).
При учете вышеперечисленных параметров в блоке ранжирования целей 10 выполняются следующие операции. До начала полета в ЗУ 13 вводят: априорные параметры и их производные, весовые коэффициенты параметров и их производных и весовые коэффициенты важности используемых параметров. В процессе сопровождения целей на основе априорных параметров и их производных и текущих фазовых координат целей в вычислителях с первого 19 по девятый 27 включительно вычисляют значения степени опасности целей (зависящих от текущих параметров целей и их производных), которые в соответствующих перемножителях (с третьего 28 по одиннадцатый 36) умножают на коэффициенты важности этих степеней и складывают во втором сумматоре 37. Наряду с этим, в вычислителях с десятого 46 по четырнадцатый 50 вычисляют значения степени выгодности поражения целей, которые в соответствующих перемножителях (с двенадцатого 39 по восемнадцатый 45) умножают на коэффициенты важности этих степеней и складывают в третьем сумматоре 38. Полученные значения степеней (опасности и выгодности) каждой цели с весовыми коэффициентами складывают в первом сумматоре 16 и сравнивают между собой в ЗУ 13. По минимуму полученной суммы определяют наиболее выгодную цель, остальные цели ранжируют по мере возрастания указанной суммы.
С учетом (6)-(22) динамика работы устройства ранжирования цели описывается следующим образом. Передающее устройство на основе сигналов управления формирует зондирующие сигналы, которые излучают в определенную область пространства. Отраженные от цели сигналы принимают, выделяют на фоне шумов, усиливают, идентифицируют и формируют по ним оценки дальностей до целей, скоростей и ускорений сближения с ними, угловых координат целей и их производных в горизонтальной и вертикальной плоскостях. Затем определяют принадлежность принятых сигналов к новой или уже сопровождаемой цели и к маневрирующей или неманеврирующей цели. В БЦВС 8 на основе оценок фазовых координат целей вычисляют ракурс каждой сопровождаемой цели, признак движения цели на истребитель (или от него) и признак попадания (или непопадания) j-й цели в зону возможного применения по ней оружия, которые вводят в блок ранжирования целей 10. В этот же блок вводят данные о типе j-й цели, о видах сигналов радиолокационных станций (PЛC) j-й цели, о режимах работы РЛС этих целей, о текущих углах атаки и крена истребителя. На основе введенных данных в вычислителях (с первого 19 по девятый 27) определяют значения степени опасности j-й цели в зависимости от: наличия (или отсутствия) облучения истребителя от РЛС этой цели, признака вида сигнала облучения, направления движения цели, текущего значения подлетного времени, производной текущего значения подлетного времени, текущего значения промаха в горизонтальной плоскости, текущего значения производной промаха в горизонтальной плоскости, текущего значения промаха в вертикальной плоскости и текущего значения производной промаха в вертикальной плоскости соответственно. Вычисленные значения степени опасности цели умножают в перемножителях (с третьего 28 по одиннадцатый 36) на соответствующие коэффициенты важности этих степеней опасности, введенные перед полетом в ЗУ 13, затем складывают во втором сумматоре 37 и умножают в первом перемножителе 15 на выбранный из массива коэффициентов, введенных в ЗУ 13 перед полетом, коэффициент, величина которого зависит от типа цели, определенной в станции РТР (5, фиг. 2) и переданной в ЗУ 13. Полученную сумму, отражающую степень опасности цели, умножают в первом перемножителе 15 на вводимый из ЗУ 13 коэффициент, величина которого зависит от типа цели. В вычислителях (с десятого 46 по четырнадцатый 50) определяют степень выгодности применения по j-й цели оружия в зависимости от: попадания ее в зону применения оружия, ракурса цели, текущего значения скорости сближения истребителя с j-й целью, разности значений требуемого и текущего углов упреждения в горизонтальной плоскости, разности значений требуемого и текущего углов упреждения в вертикальной плоскости соответственно. Вычисленные в десятом 46, одиннадцатом 47 и двенадцатом 48 вычислителях значения степени выгодности применения по j-й цели оружия подают соответственно на двенадцатый 39, тринадцатый 40 и четырнадцатый 41 перемножители. Вычисленные в четвертом 22 и пятом 23 вычислителях значения степени опасности цели в зависимости от текущего подлетного времени и его производной, используемые здесь как значения степени выгодности применения по целям оружия, подают соответственно на пятнадцатый 42 и шестнадцатый 43 перемножители. Вычисленные в тринадцатом 49 и четырнадцатом 50 вычислителях значения степени выгодности применения по целям оружия подают соответственно на семнадцатый 44 и восемнадцатый 45 перемножители. В перемножителях с двенадцатого 39 по восемнадцатый 45 значения степени выгодности применения по целям оружия умножают на соответствующие коэффициенты важности этих степеней, вводимых из ЗУ 13. Затем полученные произведения, отражающие степень выгодности применения оружия, складывают в третьем сумматоре 38 и умножают во втором перемножителе 18 на вводимый из ЗУ 13 коэффициент, величина которого зависит от типа цели. Полученные на выходах первого 15 и второго 18 перемножителей значения степени опасности j-й цели и степени выгодности применения по ней оружия соответственно складывают в третьем сумматоре 16 и подают в ЗУ 13, где запоминают. В конце каждого периода обзора пространства в ЗУ 13 запомненные значения степени опасности и одновременно степени выгодности применения по целям оружия сравнивают между собой и на основе этого сравнения ранжируют цели по степени важности. Отранжированные по степени важности поражения цели передают потребителям информации 1. По данным, поступающим из идентификатора и фильтра сопровождения 4, датчиков информации 5 и анализатора типа цели 6, устройство программирования СПЦ 12 управляет передающим устройством и ЦВМ управления лучом антенны 7 для формирования зондирующих сигналов в следующем периоде работы БРЛС и выставления луча антенной системы 2 в определенную область пространства.
Если по каким-либо причинам любой из перечисленных выше признаков или параметров будет недоступен определению на каком-то этапе обработки сигналов, то он для всех сопровождаемых целей приравнивается нулю, даже в случае его определения для части целей. При этом процедура формирования суммы, отражающей степень опасности и степень выгодности целей, не изменяется.
Заявленное устройство ранжирования целей не предъявляет жестких требований к быстродействию и объему памяти вычислителей и не накладывает дополнительных требований к составу измерителей, поэтому может быть использовано как в существующих, так и перспективных РЛК и радиоэлектронных системах управления.
Использование изобретения позволит не только существенно достоверней определить наиболее опасную для нас цель, но и определить цель, для которой в текущей ситуации обеспечиваются наиболее благоприятные условия для ее поражения в условиях ограничений, связанных с составом и возможностями бортового оборудования истребителя и цели и их вооружения.
Использованная литература
1. Антипов В. Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные радиолокационные комплексы истребителей. - М.: Воениздат, 1994.
2. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - M.: Радио и связь, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСЛЕДОВАТЕЛЬНО-ПАРАЛЛЕЛЬНЫЙ СПОСОБ РАНЖИРОВАНИЯ СОПРОВОЖДАЕМЫХ ЦЕЛЕЙ | 2002 |
|
RU2219560C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ В РЕЖИМЕ ОБЗОРА | 2001 |
|
RU2207589C2 |
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
| Способ двухэтапного ранжирования воздушных целей по степени опасности в радиолокационных информационно-управляющих системах | 2018 |
|
RU2686482C1 |

Способ ранжирования целей позволяет выбрать цель, которая является совместно наиболее опасной для нас и наиболее благоприятной для нападения на нее, в условиях ограничений, связанных с составом и возможностями бортового оборудования истребителя и цели. Способ ранжирования целей основан на вычислении минимума квадратично-линейного функционала, в составе которого одновременно учитываются как параметры, свидетельствующие об опасности цели, так и параметры, благоприятствующие нападению на нее. Если идентифицированная цель имеет лучшие летно-технические характеристики, то в функционале большую роль в его минимизации играет слагаемое, учитывающее требование обеспечения собственной защиты. В противном случае, большую роль играет слагаемое, которое характеризует возможность нападения. Достигаемым техническим результатом является повышение собственной безопасности истребителей и одновременно определение цели, для которой в текущей ситуации обеспечиваются наиболее благоприятные условия для ее поражения с учетом состава бортового оборудования истребителя и цели. 4 ил.
Способ ранжирования сопровождаемых целей, заключающийся в том, что излучают зондирующие сигналы, принимают отраженные от целей сигналы, на основе принятых отраженных от целей сигналов определяют и оценивают дальности до сопровождаемых целей, скорости и ускорения сближения с ними, на основе оцененных значений дальностей до целей и скоростей сближения с ними определяют наиболее опасную цель вычислением отношения текущей дальности до цели к скорости сближения с ней, характеризующего текущий параметр цели, остальные цели ранжируют по мере возрастания упомянутого отношения, отличающийся тем, что до начала сопровождения целей определяют соответствующие априорные параметры целей и их производные, характеризующие наибольшую степень опасности целей, соответствующие априорные параметры целей и их производные, характеризующие наиболее благоприятные условия для нападения на цели, весовые коэффициенты факторов опасности целей, зависящие от типа целей, весовые коэффициенты факторов, благоприятствующих нападению на цели, зависящие от типа целей, и весовые коэффициенты важности используемых параметров целей, в процессе сопровождения целей на основе принятых отраженных от целей сигналов оценивают угловые координаты целей и их производные, по которым, наряду с оцененными значениями дальностей до целей и их производных, определяют соответствующие априорные и текущие параметры целей и их производные, характеризующие степень опасности целей, и соответствующие априорные и текущие параметры целей и их производные, характеризующие степени благоприятности нападения на цели, на основе принятых излученных целями сигналов определяют соответствующие текущие параметры целей, характеризующие степени их опасности, и соответствующие текущие параметры целей, характеризующие степени благоприятности нападения на них, умножают квадраты разностей априорных и текущих параметров целей, характеризующие степени опасности целей, на соответствующие весовые коэффициенты важности этих параметров целей, умножают разности производных априорных и текущих параметров целей, характеризующие степени опасности целей, на соответствующие весовые коэффициенты, учитывающие важность этих производных параметров целей и временной интервал между измерениями координат целей, умножают сумму полученных произведений на соответствующий весовой коэффициент факторов опасности целей, зависящий от типа целей, и складывают с произведением, полученным в результате перемножения соответствующего весового коэффициента факторов, благоприятствующих нападению на цели, зависящего от типа целей, на сумму квадратов разностей априорных и текущих параметров целей, благоприятствующих нападению на цели, с соответствующими весовыми коэффициентами важности этих параметров целей, и разностей производных априорных и текущих параметров целей, благоприятствующих нападению на цели, с соответствующими весовыми коэффициентами, учитывающими важность этих производных параметров целей и временной интервал между измерениями координат целей, по минимуму полученной суммы определяют наиболее важную для поражения цель, остальные цели ранжируют по мере возрастания указанной суммы.
| АНТИПОВ В.Н | |||
| и др | |||
| Многофункциональные радиолокационные комплексы истребителей | |||
| - М.: Воениздат, 1994, с | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| SU 1702782 А1, 20.09.1996 | |||
| US 4041487, 09.08.1977 | |||
| US 3164829, 05.01.1965. | |||

