Изобретение относится к электромагнитным машинам ударного действия (ЭММУД) и может быть использовано в электромашиностроении при производстве ударного инструмента и специализированных ударных машин.
В настоящее время в строительстве нашел широкое применение электромеханический ударный инструмент, предназначенный для разрушения и выполнения отверстий в различных строительных материалах, таких как кирпич, бетон, камень. Однако для различных материалов необходимо использовать различные электромеханические машины из имеющегося на рынке ассортимента. Это связано с тем, что разным материалам подходит режим обработки со своим набором таких параметров, как энергия одиночного удара, частота их следования и скорость вращения бурящего инструмента, а существующие машины не позволяют работать с разным сочетанием этих параметров.
Известна ЭММУД, содержащая ударный инструмент, статор, включающий катушку и магнитопровод, направляющую, размещенный внутри направляющей бак, тормозящий упругий элемент (RU 2095233 С1, 10.11.1997, бюл. 31).
Задача, решаемая в изобретении, заключается в повышении производительности машины при обработке гетерофазных материалов с переменной твердостью и увеличении максимальной частоты ударов ЭММУД.
Поставленная задача в ЭММУД, содержащей ударный инструмент, размещаемый с одной стороны статора, включающего катушку, магнитопровод и направляющую, внутри которой размещается боек, фиксируемый возвращающим и тормозящим упругими элементами с зазором относительно инструмента, достигается тем, что упругие элементы выполнены таким образом, чтобы удовлетворить условиям
где L1 - длина возвратной пружины в свободном положении; Н1 - длина возвратной пружины в статическом положении в машине; С1 - жесткость возвратной пружины; L2 - длина тормозящей пружины в свободном положении; Н2 - длина тормозящей пружины в статическом положении в машине; С2 - жесткость тормозящей пружины; Z - зазор между бойком и инструментом в статическом положении; L - свободный ход бойка.
Выполнение этих соотношений обеспечивает условия синхронизации колебаний системы бойка с упругими элементами и вынуждающих воздействий тяговых импульсов.
Первое условие определяет двукратное превышение силы, действующей на боек, со стороны возвратного упругого элемента по сравнению с действием тормозящего упругого элемента при одинаковых отклонениях бойка от положения равновесия. При этом обеспечивается асимметричность относительно положения равновесия бойка амплитудно-частотной характеристики собственных колебаний системы бойка с упругими элементами. Амплитуда и длительность хода бойка в пространстве со стороны инструмента относительно положения равновесия бойка оказываются меньше амплитуды и длительности хода бойка в пространстве с противоположной стороны.
Такой выбор параметров упругих элементов уменьшает длительность части цикла колебания, зависимую от условий отскока, и увеличивает часть цикла колебания системы бойка, зависимую от тяговых импульсов и параметров собственных колебаний, что обеспечивает малое влияние на них возмущающего действия отскока и высокую степень синхронизации тяговых импульсов катушки и собственных колебаний. Таким образом, обеспечивается повышение производительности работы ЭММУД.
Выполнение второго соотношения приближает положение равновесия бойка к инструменту, обеспечивая условия работы ЭММУД при повышенной частоте ударов. Выбор коэффициента 2,4 определяется необходимостью размещения бойка относительно инструмента с таким зазором, при котором обеспечиваются условия эффективной работы машины с выбранными упругими элементами. При этом свободные колебания бойка относительно положения равновесия имеют ход L при отклонении в сторону инструмента, равном Z, а количества механической энергии, запасаемой в возвратном и тормозящем упругих элементах, равны.
Целесообразно выполнить направляющую удлиненной в обратную от инструмента сторону, а боек установить с возможностью осевого перемещения за границу дальнего от инструмента полюса магнитопровода.
В этом случае обеспечиваются условия максимального запаса электромагнитной энергии в катушке, после чего эта энергия преобразуется в кинетическую энергию поступательного движения бойка на инструмент и энергию удара.
При выполнении указанных условий заявляемое устройство обеспечивает автоматическое синхронизирование во времени собственных колебаний бойка и тяговых электромагнитных импульсов, а также максимальную энергию единичного удара, что не имеет аналогов в технике создания ЭММУД, а значит, соответствует критерию "изобретательский уровень".
На фиг.1 представлен вариант ЭММУД.
На фиг. 2 представлена силовая диаграмма колебательной системы бойка с упругими элементами.
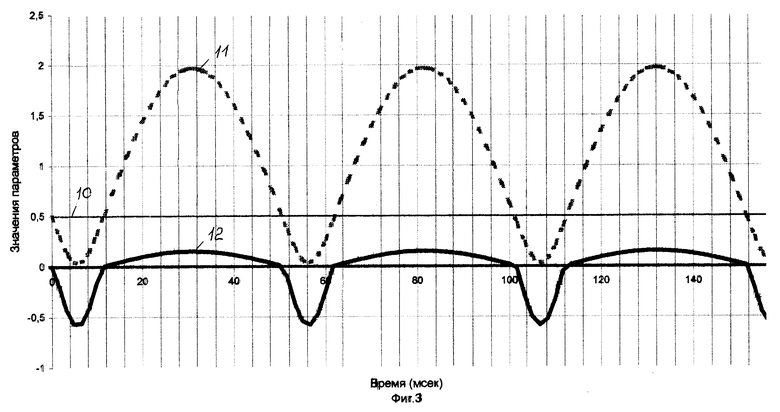
На фиг.3 представлена диаграмма собственных колебаний системы бойка.
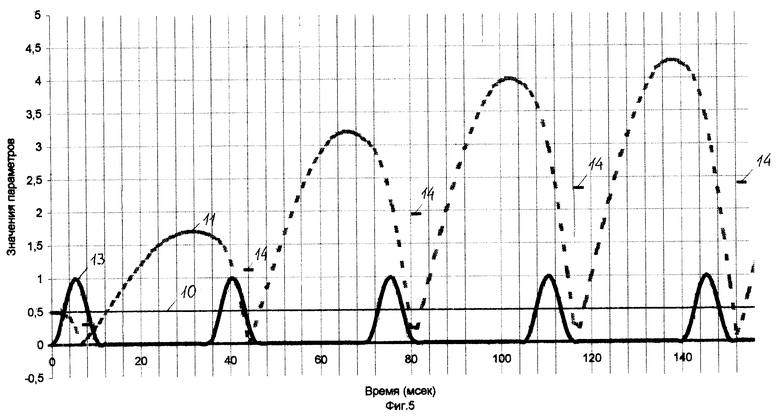
На фиг. 4 и 5 представлены диаграммы работы указанной ЭММУД при разных коэффициентах отскока.
ЭММУД (см. фиг.1) включает ударный инструмент 1, статор в виде катушки 2 с магнитопроводом 3, боек 4, расположенный внутри ствола 5, связанный с возвратной пружиной 6 и тормозящей пружиной 7.
Силовая диаграмма упругой системы ЭММУД (см. фиг.2) состоит из части 8, соответствующей возвратной пружине 6, и части 9, соответствующей тормозящей пружине 7. Указанная диаграмма удовлетворяет условию
Собственные колебания бойка на упругих элементах происходят с амплитудой, соответствующей одинаковым площадям фигур, ограничиваемых участками силовой диаграммы 8 и 9 по разные стороны от положения равновесия бойка (точки нулевой силы), что удовлетворяет условию L/Z>2,4. Условие равенства площадей обеспечивается при явно выраженной асимметрии в амплитуде хода бойка.
Точка нулевой силы, соответствующая положению равновесия бойка в колебательной системе, значительно смещена в сторону инструмента относительно середины отрезка полного хода бойка, что также обеспечивается выполнением условия L/Z>2,4.
На фиг.3 приведена диаграмма собственных колебаний системы, где диаграмма колебаний бойка вокруг линии равновесия 10 показана графиком 11, а соответствующая этим колебаниям диаграмма сил упругой системы показана графиком 12. Длительность нахождения бойка в пространстве со стороны инструмента относительно положения равновесия составляет 11 мс. Длительность нахождения бойка в пространстве, противоположном от инструмента относительно положения равновесия, составляет 39 мс (положение кривой 9 выше линии 8).
На фиг.4 показана диаграмма колебаний бойка при вынуждающем электромагнитном импульсе 13 и с энергией единичного удара 14. Коэффициент отскока при этом равен нулю.
На фиг.5 приведена такая же диаграмма при коэффициенте отскока 0,5.
Устройство работает следующим образом (см. фиг.4). При подаче импульса тока на катушку 2 возникает тяговое усилие электромагнитного поля и боек 4 движется в направлении инструмента 1, преодолевая действие пружины 6. После удара и отскока от инструмента 1 боек 4 движется в направлении от инструмента ускоряемый действием пружины возврата 6 до точки равновесия бойка в колебательной системе. Время этого хода до точки равновесия в большей степени определяется коэффициентом отскока, но, так как боек в этом пространстве имеет короткий ход, возмущающее воздействие отскока незначительно сказывается на изменении общего хода бойка в крайнее положение.
После прохода точки равновесия боек 4 начинает сжимать пружину торможения 7. Сжатие пружины 7 будет обеспечиваться за счет возврата накопленной механической энергии в пружине 6 до положения бойка, при котором запас этой механической энергии будет равен механической энергии, накапливаемой пружиной 7. Дальнейшее сжатие пружины 7 возможно только за счет доли энергии, переданной бойку 4 при отскоке от инструмента 1. Таким образом, дополнительное смещение бойка 4 в сторону инструмента 1 определяется коэффициентом отскока. При этом большая энергия отскока обеспечивает большее смещение бойка. Величина тока в катушке определяется индуктивным сопротивлением, зависящим от положения бойка. При большем отклонении бойка индуктивное сопротивление уменьшается, ток увеличивается, что обеспечивает больший запас электромагнитной энергии в катушке. Максимальный запас электромагнитной энергии в катушке обеспечивается при выходе бойка за границы магнитопровода.
В момент остановки бойка накопленная механическая энергия в пружине 7 определяется механической энергией пружины 6 и энергией отскока. После остановки боек начинает движение на инструмент и происходит суммирование механической энергии, запасенной в пружине 7, с электромагнитной энергией, запасаемой катушкой 2. Оба вида энергии преобразуются в кинетическую энергию поступательного движения бойка 4 в сторону инструмента 1. Параметры тягового электромагнитного импульса 13 выбираются таким образом, чтобы его длительность не превышала времени движения бойка 4 на инструмент 1. По ходу движения бойка на инструмент часть энергии тратится на преодолении упругих сил пружины 6. Таким образом, в момент удара кинетическая энергия бойка 4 будет определяться энергией, полученной в результате отскока в предыдущий удар, и электромагнитной энергией, запасенной в катушке. После отскока бойка 4 от инструмента 1 цикл повторяется.
При внедрении инструмента 1 в более твердый материал (см. фиг.5) происходит больший отскок бойка 4 от инструмента 1, при этом энергия отскока используется на больший вывод бойка 4 за пределы катушки 2 и повышение таким образом запаса электромагнитной энергии. Далее энергия отскока возвращается упругим элементом 7 в систему и суммируется с электромагнитной энергией катушки, чем обеспечивается большая энергия удара 14. После разрушения твердой фазы гетерофазного материала энергия удара автоматически уменьшается (см. фиг.4).
При работе на повышенных частотах удара боек 4, отскочивший от инструмента 1, ускоренный пружиной 6 в направлении от инструмента, тормозится как за счет действия пружины 7, так и за счет действия тягового импульса 13. После остановки боек 4 движется в направлении инструмента 1 за счет энергии, накопленной в пружине 7, и продолжающим действовать тяговым усилием катушки 2. После удара тяговое усилие катушки 2 прекращает свое действие и цикл повторяется. За счет расположения бойка 4 в равновесии, смещенном в сторону инструмента 1, обеспечивается повышение КПД удара при больших частотах, т.к. смещение бойка 4 при обратном ходе за точку равновесия обеспечивает частичную компенсацию потерь энергии в возвратной пружине 6 энергией, запасаемой в пружине 7. При этом, чем меньше ход бойка в пространстве со стороны инструмента относительно положения равновесия, тем выше частота ударов, которая может быть реализована в данном устройстве.
Таким образом, заявляемый способ позволяет повысить производительность машины при обработке гетерофазных материалов с переменной твердостью и увеличить максимальную частоту ударов ЭММУД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БОЙКОМ ЭЛЕКТРОМАГНИТНОЙ МАШИНЫ УДАРНОГО ДЕЙСТВИЯ | 1999 |
|
RU2221688C2 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1998 |
|
RU2135345C1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2008194C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496215C1 |
| Электромагнитная машина ударного действия | 1985 |
|
SU1404322A1 |
| Способ управления двухкатушечным электромагнитным двигателем | 1986 |
|
SU1525856A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2019 |
|
RU2726336C1 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496214C2 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU959250A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |


Изобретение относится к электромагнитным машинам ударного действия (ЭММУД) и может быть использовано в электромашиностроении при производстве ударного инструмента и специализированных ударных машин. Заявленная ЭММУД содержит ударный инструмент, размещенный с одной стороны статора, который включает катушку, магнитопровод и направляющую, внутри направляющей размещен боек. Боек фиксирован возвращающим и тормозящим упругими элементами с зазором относительно инструмента. Имеется математическое соотношение для выполнения упругих элементов. Техническим результатом является повышение производительности машины при обработке гетерофазных материалов с переменной твердостью и увеличение максимальной частоты ударов ЭММУД. 1 з.п.ф-лы, 5 ил.

где L1 - длина возвратной пружины в свободном положении;
Н1 - длина возвратной пружины в статическом положении в машине;
С1 - жесткость возвратной пружины;
L2 - длина тормозящей пружины в свободном положении;
H2 - длина тормозящей пружины в статическом положении в машине;
С2 - жесткость тормозящей пружины;
Z - зазор между бойком и инструментом в статическом положении;
L - свободный ход бойка.
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2095233C1 |
| КОМПОЗИЦИЯ ДЛЯ НАПОЛНЕНИЯ КАБЕЛЕЙ | 2001 |
|
RU2257395C2 |
| СН 493078, 30.06.1970 | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |

