(5k) СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ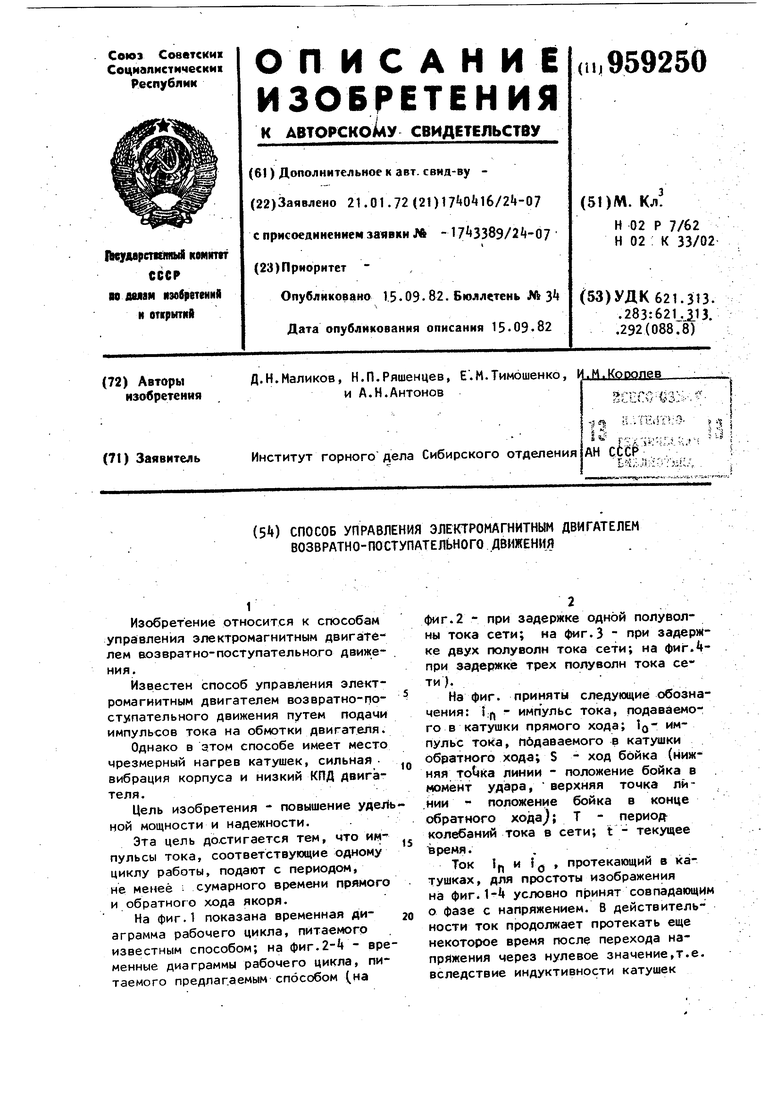
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2472243C1 |
| Способ управления двухкатушечным электромагнитным двигателем | 1986 |
|
SU1525856A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486656C1 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU498703A1 |
| Ударный узел электромагнитного перфоратора | 1990 |
|
SU1700226A1 |
| СИНХРОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496214C2 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1987 |
|
SU1577064A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2496215C1 |
| СПОСОБ УПРАВЛЕНИЯ БОЙКОМ ЭЛЕКТРОМАГНИТНОЙ МАШИНЫ УДАРНОГО ДЕЙСТВИЯ | 1999 |
|
RU2221688C2 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1999 |
|
RU2192346C2 |
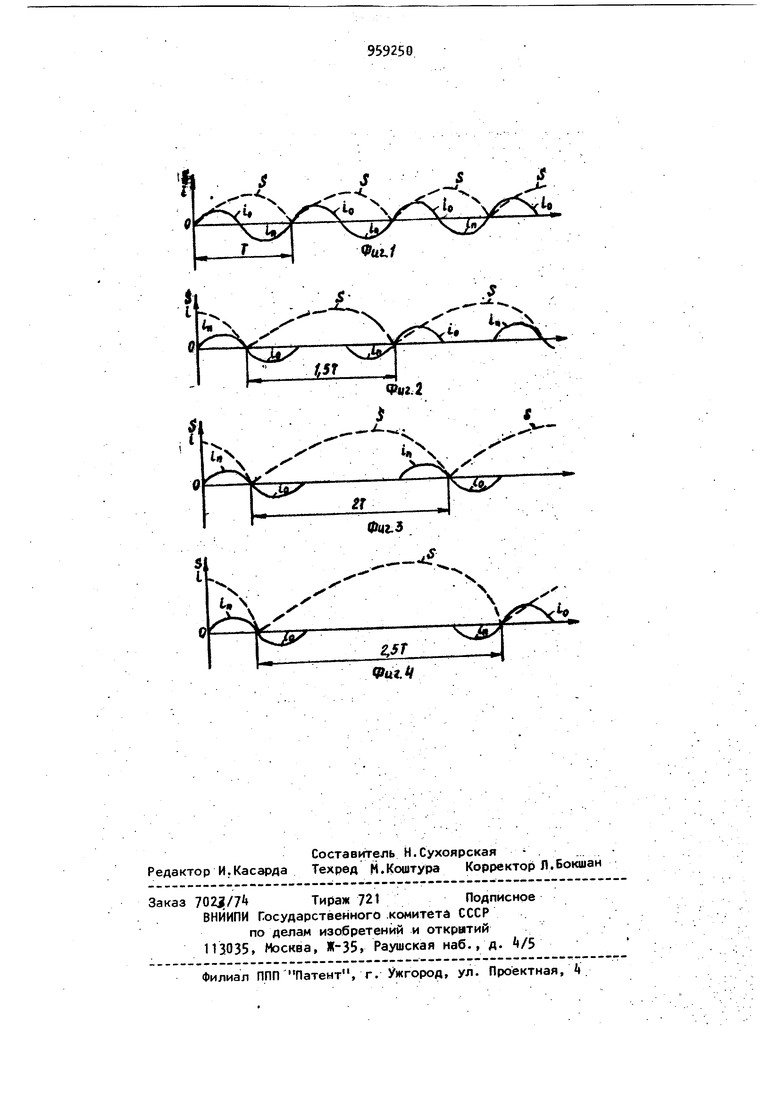
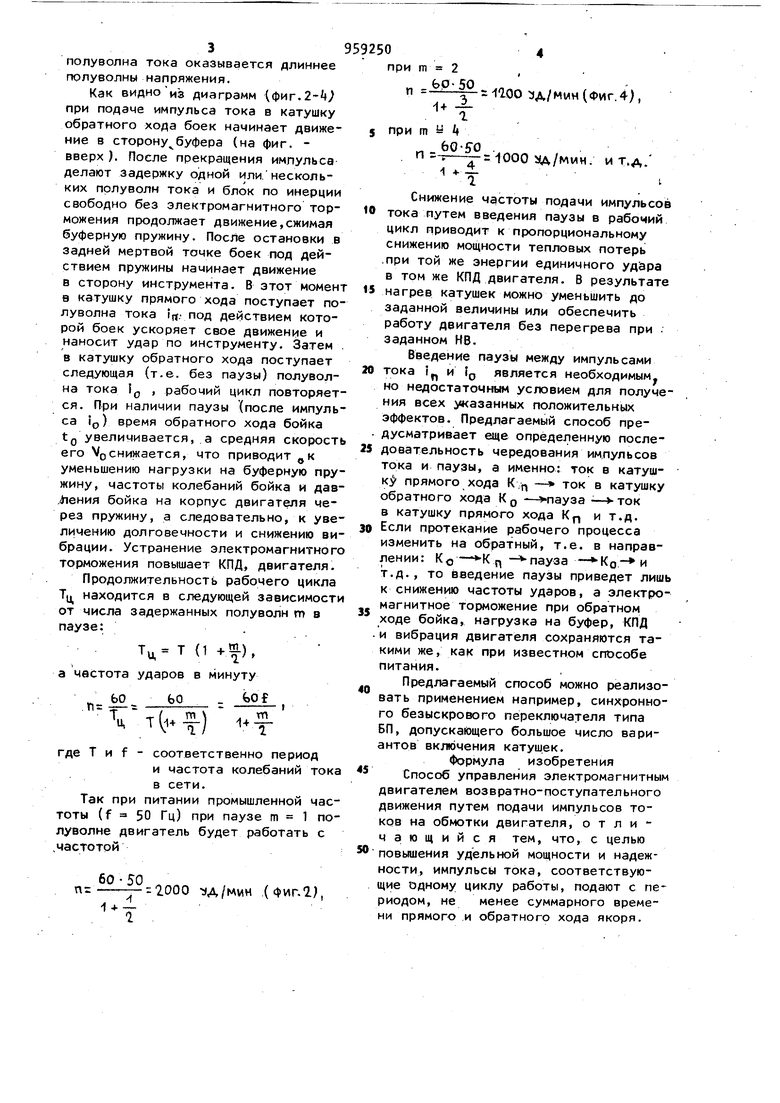
Изобретение относится к способам управления электромагнитным двигателем возвратно-поступательного движения. Известен способ управления электромагнитным двигателем возвратно-поступательного движения путем подачи импульсов тока на обмотки двигателя. Однако в зтом способе имеет место чрезмерный нагрев катушек, сильная вибрация корпуса и низкий КПД двигателя. Цель изобретения - повышение удел ной мощности и надежности. Эта цель достигается тем, что им пульсы тока, соответствующие одному циклу работы, подают с периодом, не менее ; сумарного времени прямого и обратного хода якоря. На фиг.1 показана временная диаграмма рабочего цикла, питаемого известным способом; на иг.2- - вре менные диаграммы рабочего цикла, питаемого предлагаемым способом (а фиг.2 - при задержке одной полуволны тока сети; на фиг.З - при задержке двух полуволн тока сети; на фиг.4при задержке трех полуволн тока сети ). На фиг. приняты следующие обозначения: i.f, - импульс тока, подаваемого в катушки прямого хода; IQ- импульс тока, подаваемого в катушки обратного хода; S - ход бойка (нижняя Totika линии - положение бойка в момент удара, верхняя точка лиНИИ - положение бойка в конце обратного хода); Т - период колебаний тока в сети; t - текущее %ремя. Ток 1 и i , протекающий в катушках, для простоты изображения на фиг. l-i условно принят совпадающим о фазе с напряжением. В действительности ток продолжает протекать еще некоторое время после перехода напряжения через нулевое значение,т.е. вследствие индуктивности катушек
полуволна тока оказывается длиннее полуволны напряжения.
Как видноиз диаграмм (фиг.2- при подаче импульса тока в катушку обратного хода боек начинает движение в сторону буфера (на фиг. вверх ). После прекращения импульса делают задержку одной илинескольких полуволн тока и блок по инерции свободно без электромагнитного торможения продолжает движение,сжимая буферную пружину. После остановки в задней мертвой точке боек под действием пружины начинает движение в сторону инструмента. В этот момен в катушку прямого хода поступает полуволна тока iff; под действием которой боек ускоряет свое движение и наносит удар по инструменту. Затем в катушку обратного хода поступает следующая (т.е. без паузы) полуволна тока I,
рабочий цикл повторяется. При наличии паузы (после импульса ip) время обратного хода бойка tjj увеличивается, а средняя скорость его VQснижается, что приводит к уменьшению нагрузки на буферную пружину, частоты колебаний бойка и дав,ения бойка на корпус двигателя через пружину, а следовательно, к увеличению долговечности и снижению вибрации. Устранение электромагнитного торможения повышает КПД, двигателя. Продолжительность рабочего цикла Тц находится в следующей зависимости от числа задержанных полуволн m в паузе:.
Т Т (1 +Ш-), а частота ударов в минуту
ЬО ЬО - ,
.n
m
т(.
-f)
1+
u,
где Т и f - соответственно период
и частота колебаний тока в сети.
Так при питании промышленной частоты (f 50 Гц) при паузе m 1 полуволне двигатель будет работать с .частотой
пг . 2000 А/мин .(ФигЛ;,
при m 2
n P50 (xoo ЗЛ/мми(Фиг.4),
i
при m у
bQ-SO . --- -ЛООО liAll wH. и Т.Д.
Ч
Снижение частоты подачи импульсов тока путем введения паузы в рабочий цикл приводит к пропорциональному снижению мощности тепловых потерь при той же энергии единичного удЗра в том же КПД двигателя. В результате
нагрев катушек можно уменьшить до заданной величины или обеспечить работу двигателя без перегрева при . заданном НВ.
Введение паузы между импульсами
тока и Q является необходимым, но недостаточным условием для получения всех указанных положительных эффектов. Предлагаемый способ предусматривает еще определенную последовательность чередования имлульсов тока и паузы, а именно: ток в катушкр прямого хода К. -- ток в катушку обратного хода KQ - пауза -VTOK в катушку прямого хода Кр и т.д.
Если протекание рабочего процесса изменить на обратный, т.е. в направKO- К
К,
пауза
и
п
Т.Д., то введение паузы приведет лишь к снижению частоты ударов, а электромагнитное торможение при обратном ходе бойка, нагрузка на буфер, КПД и вибрация двигателя сохраняются такими же, как при известном способе питания.
Предлагаемый способ можно реализовать применением например, синхронного безыскрового переключателя типа БП, допускающего большое число вариантов включения катушек.
Формула изобретения Способ управления электромагнитным двигателем возвратно-поступательного движения путем подачи импульсов токов на обмотки двигателя, отличающийся тем, что, с целью повышения удельной мощности и надежности, импульсы тока, соответствующие одному циклу работы, подают с периодом, не менее суммарного времени прямого и обратного хода якоря.
цх
Фчг.3
г,5Т
Фиг. 4
