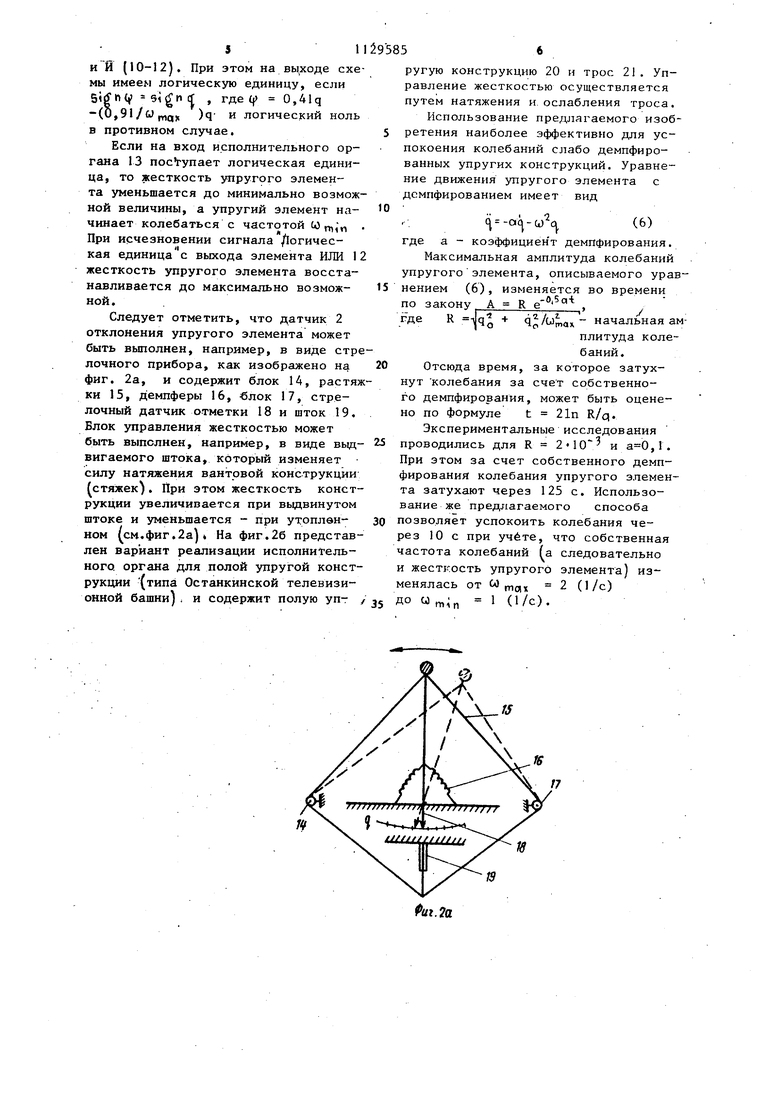
1 Изобретение относится к демпфированию колебаний упругих элементов конструкции объектов и может быть - преимущественно использовано npi проектировании и создании перспективных систем управления объектами нежесткой конструк ции Известно устройство демпфирования для успокоения колебательного движения гибких элементов конструкции объекта, основанное на использовании демпферов, которые с одной стороны крепятся к относительно неподвижным частям конструкции, а с другой - к подвижньп, и предназначено для преобразования кинетической энергии подвижных элементов в какой-либо иной вид энергий ij , Использование демпфирующих свойст трения в шарнирных соединениях также можно отнести к одному из путей реализации такого устройства. Недостатком данного устройства является низкое быстродействие в тех случаях, когда специально используемые демпферы или /и/естестве ное демпфирование, обеспечиваемое конструктивными особенностями объекта, не в состоянии обеспечить требуе мых временных характеристик переходного процесса успокоения колебательного движения гибких элементов конст рукции, а использование более мощных демпферов либо нежелательно, либо вообще.невозможно,. Целью изобретения является повышение быстродействия устройства. Поставленная цель достигается тем что устройство для успокоения колебаний упругого элемента переменной жесткости, содержащее последовательно соединенные исполнительный орган объект управления и датчик отклонения, дополнительно содержит элемент первый делитель напряжения, первый релейный элемент и последовательно соединенные дифференцирующий блок, инвертор, второй делитель напряжения, сумматор, второй релейный элемент, элемент ИЛИ-НЕ и элемент ИЛИ, выход которого соединен с входом исполнительного органа, выход датчика отклонения через первый делитель напряжения соединен с вторьм входом сумматора, через,: последовательно соединенные первый релейный элемент и элемент И соединен с вторым входов элемента ИЛИ и с входом дифференци83рующего блока непосредственно, первый вход элемента ИЛИ-НЕ подключен к второму входу элемента И, первый вход которого соединен с вторым входом элемента ИЛИ-НЕ. На фиг. 1 представлена функциональная .схема устройства; на фиг.2ястрелочный прибор; на фиг . исполЙйтельньпй орган; на фиг. 3 и 4 - фазовый портрет. Устройство содержит объект управления 1 (упругий элемент), датчик отклонения 2, дифференцирующий блок 3, инвертор 4, первый и второй делители напряжения 5 и 6, сумматор 7, пер-i вьй и второй релейные элементы 8 и 9, элемент И 10, элемент ИЛИ-НЕ 11, элемент ИЛИ 12, исполнительный орган 13. Физическая сущность работы предлагаемого устройства заключается в следующем. Динамика; движения упругого элемента без демпфирования описывается системой дифференциальных уравнений второго порядка . ) где q - обобщенная координата отклонения элемента от положения равновесия; и - собственная частота колеба, НИИ, которая связана с коэффициентом жесткости С следующим соотношением: о с;т, ггде m - массовая характеристика упругого элемента. Пусть коэффициент жесткости может изменяться в некоторых пределах . C tmini maxl то же, частота колебаний изменяется в преде 6 а) спокойном сое-) тоянии, естественноi жесткость элемента должна быть ма.ксимальной, поскольку это позволяет уменьшить амплитуду колебаний, возникающих в результате влияния какого-либо внешнего воздействия. Пусть в результате внешнего воздействия в момент t объект 1 находится в ненулевом состоянии (ко- леблется) q, (t) q , q (t .420 Требуется найти такое управление U (t) (t) , KqTOpoe минимизировало г ы функционал j cJc , т.е. успокаивало бы объект за минимально короткое время. Данная постановка является постановкой классической задачи оптимального управления, кото-i рая может быть решена с использованием -принципа максимума Л.С.Понтрягина. Введем в рассмотрение вектор сопряженных переменных { С), jij г и запишем гамильтониан И -1+Ц, из которого нетрудно получить сопря женную систему аи „ . зн ,, (,,g,,. Как известно, оптимальное управление и , минимизирующее заданный функционал качества, ищется из усло вия / lflЯ,..)...lJ) От управляющего параметра зависит только часть гальмильтониана, которая может быть записана в виде H -UViVi откуда нетрудно полу чить структуру оптимального управ ления u.f тах 2Я.О ,4-241 0 и„,0,Х, lUn,;«, Для решения задачи в форме синтеза управления в форме обратной связи) необходимо определить (ji как функ1 ию координат q, и q. Запишем уравнения движения упругого эле мента и сопряженнрй системы совмест но, , : -11 ij)-Uiy , где q, q, 2Как видим, обе системы описьшаются идентичными уравнениями. Решение уравнения такого типа имеет вид ; ci( 4nratVQ(l1-R4ir5iC nllp 44iri1f V где . R . + амплитуда коЧ° Ч1ЯоЧ,)- «баний; , Ч vT.0 to - начальная фаза Кривая (4) на фазовой плоскости (q, представляет собой окружность радиуса R. Изменение харак тера фазовой траектории при измене НИИ жесткости конструкции наглядно представлено на фиг, 3 и 4. Из (4) следует, что решения уравнений движения прямой и сопряженной систем могут отличаться только радиусом и фазой, а поскольку в законе управления (3) используются лишь знаки координат q(t) и (j)(t), то на решение задачи будет сказываться только начальная фаза сопряженной системы I tpi arctg; lJUoMi i o l Следовательно, координата ( можеТ| быть представлена в виде I ,с|, l coeiLfy vc 5;r t|j,,)|,ni). Экспериментальные исследования, проведенные на ЭВМ типа путем моделиррва-f ния управляемого движения объекта , показали, что наискорейшее успокоение упругого элемента осуществляется в том случае, если кривая (р имеет вид (0..),.H- :(5) Предлагаемое устройство pa6oTaet следующим образом. После воздействия внешнего возмущающего момента упругий элемент начинает колебаться с частотой поскольку в состоянии покоя жесткость упругого элемента Максимальна (из условия снижения амплитуды колебаний, возникающих от действия внешнего возмущающего импульса. Датчик 2 отклонений начинает выдавать текущее значение величины обобщенной координаты отклонения °уп- ругого элемента q, которое поступа ет на входы дифференцирукяцего блока 3 и первого делителя напряжения 5 с коэффициентом передачи 0,41. Теку-щее значение скорости обобщенной координаты отклонения упругого элемента .q выдается с выхода дифференцирующего блока 3, инвертируется с использованием инвертора 4 и поступает на вход второго делителя напряжения 6 с коэффициентом передачи 0,91 /( . Величины 0,41 и (0,91 поступают на входы сумматора 7, а значение знака полученной величины формируется с использованием релейного эНемента 9. Текущий знак величины q формируется с помощью релейного, элемента 8. Сравнение знаков, формируемых на выходах релейного элемента 8 и релейного элемента 9, осуществляется с помощью элементов ИЛИ, ИЛИ-НЕ и И (10-12). При этом на вцходе схе мы имеем логическую единицу, если SitfnV , где (() 0,41q -(u, )q- и логический ноль в противном случае. Если на вход исполнительного органа 13 посгупает логическая единица, то жесткость упругого элемента уменьшается до минимально возмож ной величины, а упругий элемент начинает колебаться с частотой со f, При исчезновении сигнала /1огическая единица с выхода элемента ИЛИ I жесткость упругого элемента восстанавливается до максимально возможной. Следует отметить, что датчик 2 отклонения упругого элемента может быть вьшолнен, например, в виде стр лочного прибора, как изображено на фиг. 2а, и содержит блок 14, растя ки 15, демпферы 16, блок 17, стрелочный датчик отметки 18 и шток 19. Блок управления жесткостью может быть выполнен, например, в виде выд вигаемого штока, который изменяет силу натяжения вантрвой конструкции Гстяжек). При этом жесткость конст рукции увеличивается при выдвинутом штоке и уменьшается - при утопленном (см.фиг.2а) На фиг.26 представ лен вариант реализации исполнительного органа для полой упругой конст рукции (типа Останкинской телевизионной башни), и содержит полую упругую конструкцию 20 и трос 21. Управление жесткостью осуществляется путем натяжения и ослабления троса. Использование предлагаемого изобретения наиболее эффективно для успокоения колебаний слабо демпфированных упругих конструкций. Уравнение движения упругого элемента с демпфированием имеет вид cj )c (6) где а - коэффициент демпфирования. Максимальная амплитуда колебаний упругогоэлемента, описываемого урав нением (6), изменяется во времени по закону А где R TJq - начальная амОплитуда колебаний. Отсюда время, за которое затухнут колебания за счет собственного демпфирования, может быть оценено по формуле t 21п R/q. Экспериментальные исследования проводились для R и ,1. При этом за счет собственного демпфирования колебания упругого элемента затухают через 125 с. Использование же предлагаемого способа позволяет успокоить колебания через 10 с при учёте, что собственная частота колебаний (а следовательно и жесткость упругого элемента) изменялась от W д 2 (1/с) °° (1/с).



УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ, т содержащее последовательно соединенные исполнительный орган, объект управления и датчик отклонения, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит элемент И, первый делитель напряжения, первый релейный элемент и последовательно соединенные дифференцирующий блок, инвертор, второй делитель напряжения, сумматор, второй релейный элемент, элемент ИЛИ-НЕ и элемент ИЛИ, выход которого соединен с входом исполнительного органа, выход датчика отклонения через первый -делитель напряжения соединен с вторым входом сумматора, а через последовательно соединенные первый релейный элемент и элемент И соединен с вторым входом элемента ИЛИ и с входом дифференцирующего блока непосредственн,о, первый вход элемента ШШ-НЕ подключен к второму входу « k элемента И, первый вход которого соединен с вторым входом элемента ИЛИ-НЕ.
f/amяжtнae и oc/taSftent/e I
.2S Й/Ww/ccЧоЯв/ j/U/ya/cc
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пановко Я.Г | |||
| Вв едение в теорию механических колебаний | |||
| М., Наука, 1971, С.32 (прототип). | |||
