Изобретение относится к области демпфирования колебаний упругих элементов конструкции объектов и может быть преимущественно использовано при проектировании и создании перспективных систем управления объектами нежёсткой конструкции.
Известно устройство [1] (аналог), предназначенное для гашения колебаний упругого элемента, когда пассивным демпфированием в системе возможно пренебречь. Это устройство реализует закон управления жёсткостью упругого элемента в координатно-временной форме

где q1 - фазовая координата (отклонение) упругого элемента; ω max, ω min - максимальная и минимальная частоты колебаний упругого элемента из диапазона возможных изменений; t - текущее время; t0 - наиболее поздний момент времени, в который отклонение упругого элемента обращалось в ноль;

- длительность режима движения с максимальной жёсткостью в течение характерного полупериода колебаний Т0=Т2+Т3,

- соответственно длительность режима движения с минимальной жёсткостью в течение характерного полупериода колебаний; ϕ - постоянный при фиксированном значении параметра x=(ω min/ω max)2 параметр (угол логики).
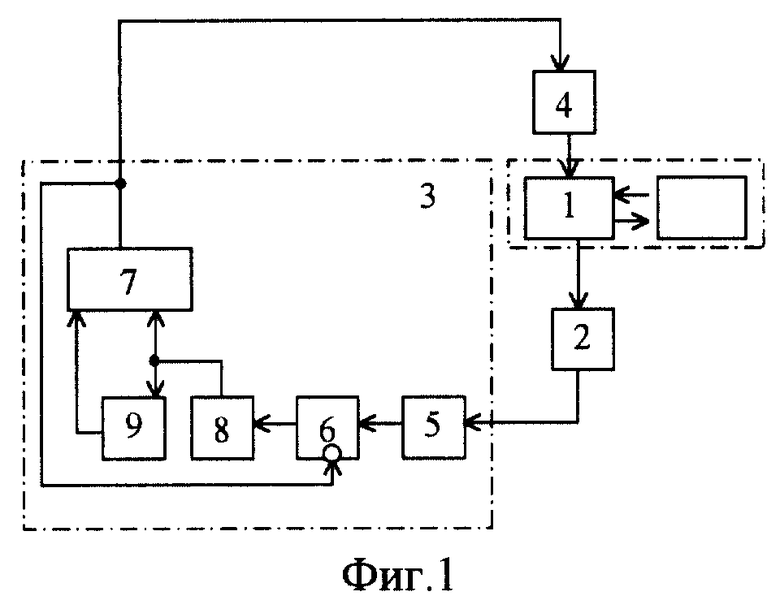
Функциональная схема устройства [1] представлена на фиг.1. Устройство содержит объект 1 управления (упругий элемент), датчик 2 отклонения упругого элемента, блок 3 управления, регулятор 4 жёсткости. Блок 3 управления содержит индикатор нуля 5, ключ 6, триггер 7, первый и второй элементы задержки 8 и 9.
Вместе с тем, весьма часто в упругой системе в течение управляемого процесса синхронно с изменениями жёсткости происходят значительные изменения диссипативного параметра. Как правило, это явление обусловлено особенностями исполнительных органов системы управления. В частности, демпферы-регуляторы жёсткости [2], построенные на использовании способности магнитореологической суспензии изменять свои свойства под действием электромагнитного поля [3], привносят в систему согласованно с релейным изменением жёсткости дополнительную диссипацию, зависящую от режима их работы.
Однако заметим, что и в данном случае управление (1) может быть также использовано для гашения свободных колебаний упругих элементов. Действительно, динамика таких упругих элементов весьма часто может быть описана системой обыкновенных дифференциальных уравнений

где qi, dqi/dt, i=1, 2 - фазовые координата и скорость соответственно; b≥ 0 - коэффициент пассивного демпфирования, обусловленный собственной и внесённой демпфером диссипацией; ω 2∈[ω
Поскольку рассматривается случай, когда внесённая демпфером-регулятором жёсткости диссипация существенно зависит от режима его функционирования, то принимаем, что b(ω )([b(ω min)=bmin, b(ω max)=bmax]. Как правило, bmin>bmax. Полагаем также, что во всём диапазоне изменения управляющего параметра динамика системы (4) сохраняет колебательный характер. Поcледнее предположение справедливо, если 4ω
Построение строго оптимального управления жёсткостью в задаче гашения колебаний системы (4) представляет значительные трудности. Однако, принимая во внимание синхронность и зависимость изменений диссипативного параметра системы от ее жесткости, целесообразно этот эффект считать сопутствующим. Такой подход позволяет в основу решения положить синтез субоптимального управления жесткостью по методике, разработанной для систем с постоянным демпфированием [4] с коррекцией на нестационарность коэффициента диссипации [5, 6]. При этом используются структура и основные свойства оптимального управления, но достигается инвариантность субоптимального решения от начальных и терминальных условий процесса, что существенно упрощает его техническую реализацию.
Исходя из вышесказанного, далее считаем, что искомое управление жёсткостью является кусочно-постоянным и может принимать значения либо ω min либо ω max. Соответственно, коэффициент демпфирования также является кусочно-постоянным:

Путем проведения преобразования координат

где t≥ 0, 0≤ tmax≤t - соответственно текущее и суммарное время движения системы с максимальной жёсткостью, система (4) сводится к системе

описывающей динамику свободного осциллятора без пассивного демпфирования. Здесь ω *=[ω 2-b2/4]1/2 (соответственно ω *max=[ω
Координатно-временное управление вида (1) обоснованно может быть применено к системе (7) в координатном базисе (s1, s2).
Формально это означает проведение замены q1(t1)(s1(t1) в законе (1). Кроме того, необходимо учесть, что изменятся частотные параметры системы ω max→ω*max, ω min→ω*min и соответственно величина параметра глубины управления жёсткостью
В то же время согласно преобразованиям (6) координаты q1 и s1 отличаются лишь знакопостоянным экспоненциальным множителем, учет которого при реализации закона вида (1) в базисе (s1, s2) необязателен. Учтем также, что в качестве управляющих параметры ω и ω * эквивалентны. Эти обстоятельства и позволяют сделать вывод о возможности использования закона управления (1) без каких-либо изменений для подавления колебаний упругих систем с согласованными синхронными переключениями жёсткостного и диссипативного параметров. Изменятся лишь значения параметров Т2 и T3, определяемых по формулам (3) и (2) соответственно, в которых производятся замены [5, 6]:

При этом последняя из перечисленных замен обусловлена не стационарностью коэффициента диссипации управляемой упругой системы.
Эффект от функционирования устройства [1] (быстродействие) варьируется через значения параметров T2 и T3, определяющих характеристики элементов задержки 8 и 9 соответственно. При этом предполагается точное значение частот ω
Особенно актуальна эта проблема для упругих систем, конструктивные параметры и характеристики которых способны изменяться в течение цикла их применения.
В таких условиях целесообразнее использовать устройство [6] (прототип), в котором в процессе колебаний реального упругого элемента на основе информации о его движении осуществляется корректирование частотных параметров на каждом интервале управления. Это устройство обеспечивает реализацию оптимального закона управления в координатном базисе (s1, s2) в форме обратной связи [4, 5]:

где ϕ - оптимальный угол логики определяется из соотношений


Как показано в [1, 5], законы (1) и (10) в координатном базисе (s1, s2) формально эквивалентны. В этой связи представляется целесообразным, используя преимущества устройства [6], реализовать на его основе управление в координатно-временной форме (1). При этом достигается упрощение устройства [6].
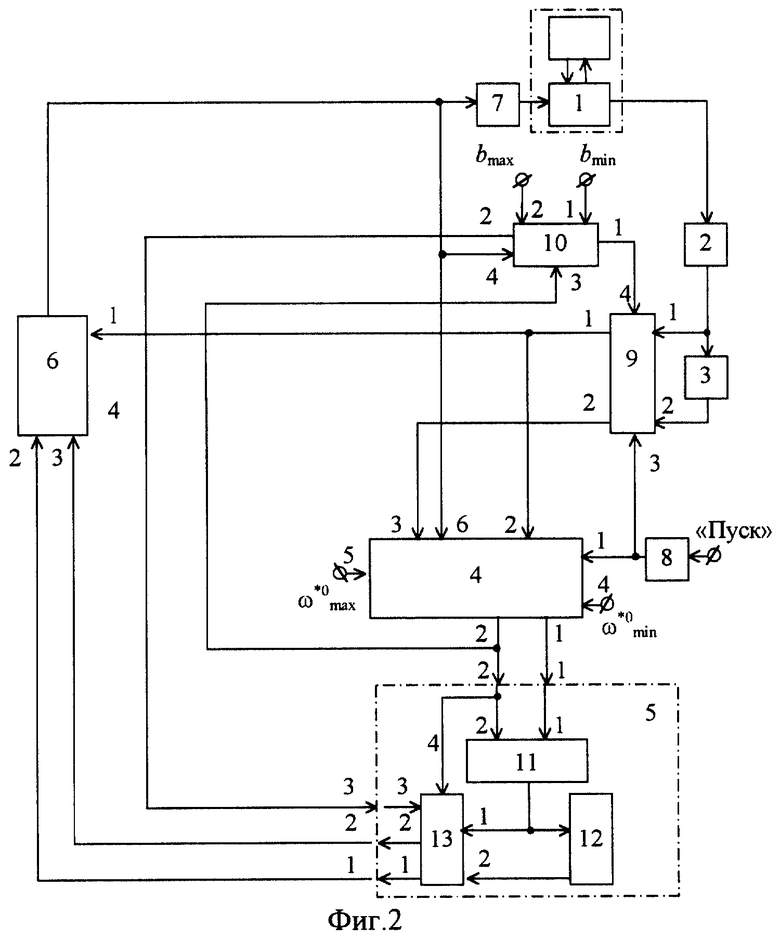
На фиг. 2 представлена функциональная схема предлагаемого устройства, на фиг.3 - структурная схема блока управления, на фиг.4 - то же, блока расчёта параметров, на фиг.5 - то же, блока расчёта угла логики, на фиг.6 - то же, блока расчёта временных параметров, на фиг.7 - то же, функционального блока, на фиг.8 - то же, блока расчёта параметра глубины управления, на фиг. 9 - то же, блока оценки частоты, на фиг. 10 - то же, блока преобразования координат, на фиг. 11 - то же, блока выбора коэффициента диссипации.
Устройство для успокоения колебаний упругого элемента переменной жёсткости (фиг.2) содержит: объект 1 управления (упругий элемент), датчик 2 отклонения, дифференцирующий блок 3, блок 4 оценки частоты, блок 5 коррекции частоты, блок 6 управления, регулятор 7 жёсткости, генератор 8 тактовых импульсов, блок 9 преобразования координат, блок 10 выбора коэффициента диссипации.
Блок 5 коррекции частоты содержит блок 11 расчета параметра глубины управления, функциональный блок 12, блок 13 расчёта параметров.
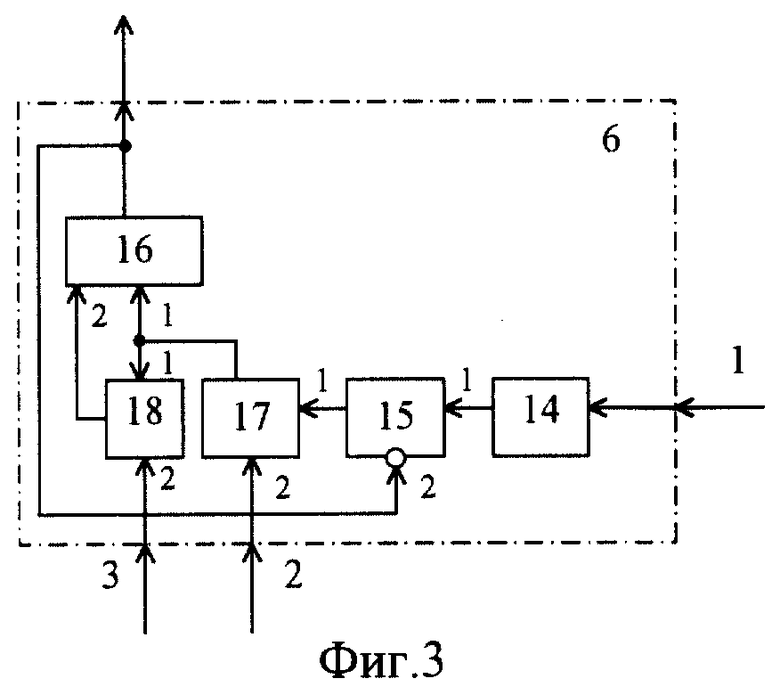
Блок 6 управления (фиг.3) содержит индикатор нуля 14, ключ 15, триггер 16, первую и вторую управляемые линии задержки 17 и 18.
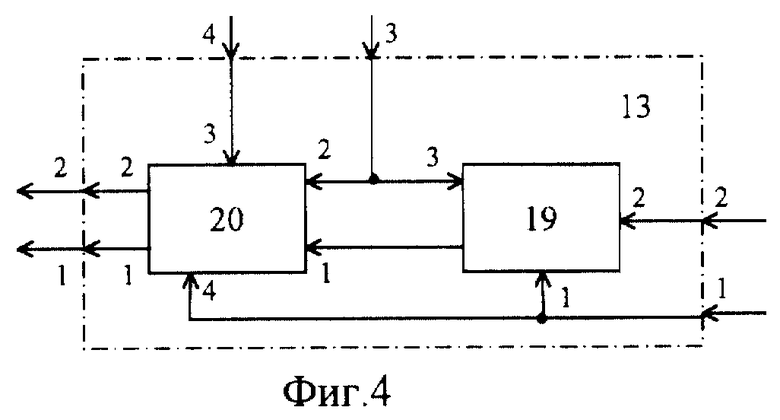
Блок 13 расчёта параметров (фиг.4) содержит блок 19 расчёта угла логики, блок 20 расчёта временных параметров.
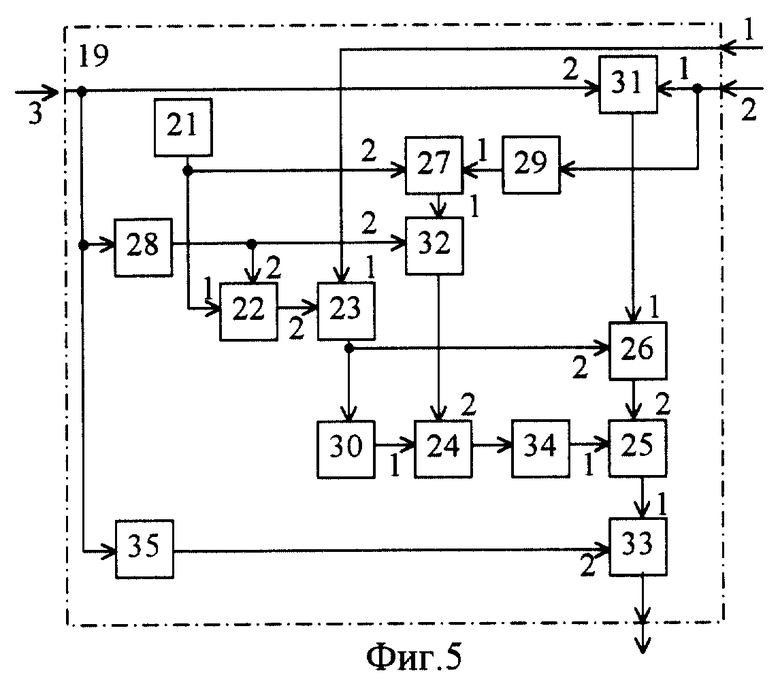
Блок 19 расчёта угла логики (фиг.3) содержит источник постоянного напряжения 21, первый-шестой сумматоры 22-27, первый-третий квадраторы 28-30, первый-третий блоки умножения 31-33, вычислитель квадратного корня 34, вычислитель обратной величины 35.
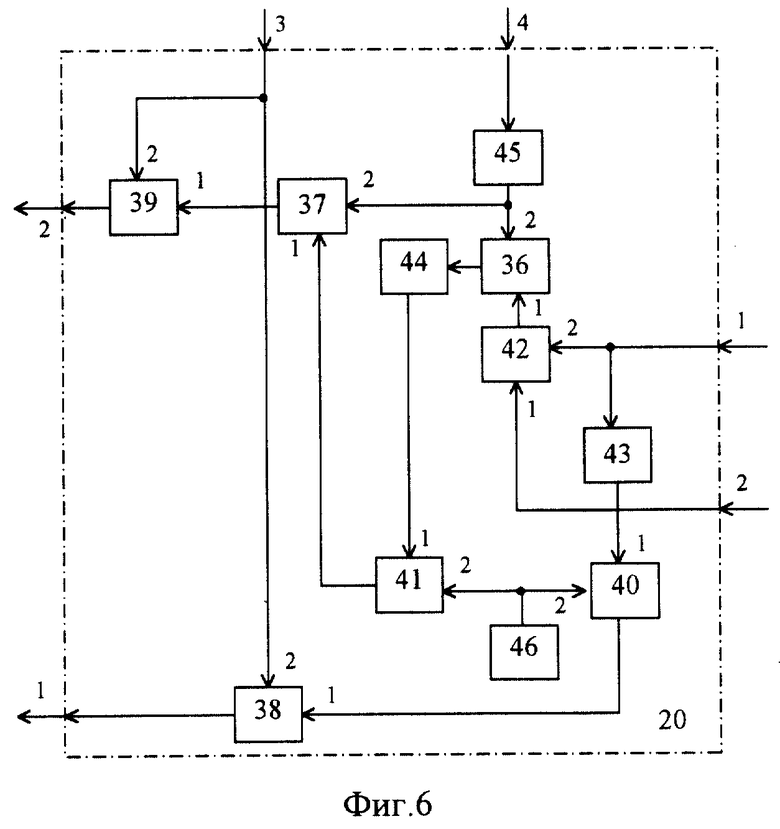
Блок 20 расчета временных параметров (фиг.6) содержит первый-четвёртый делители 36-39, первый-третий сумматоры 40-42, первый и второй вычислители арктангенса 43 и 44, вычислитель квадратного корня 45, источник постоянного напряжения 46.
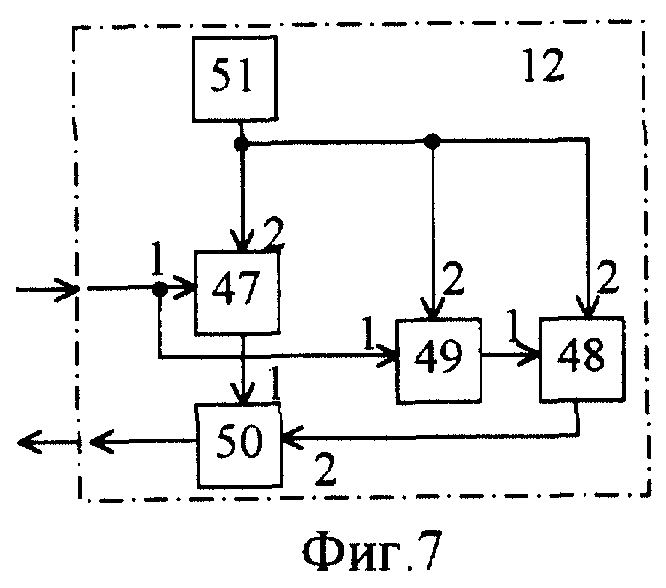
Функциональный блок 12 (фиг.7) содержит два сумматора 47 и 48, блок умножения 49, делитель 50, источник постоянного напряжения 51.
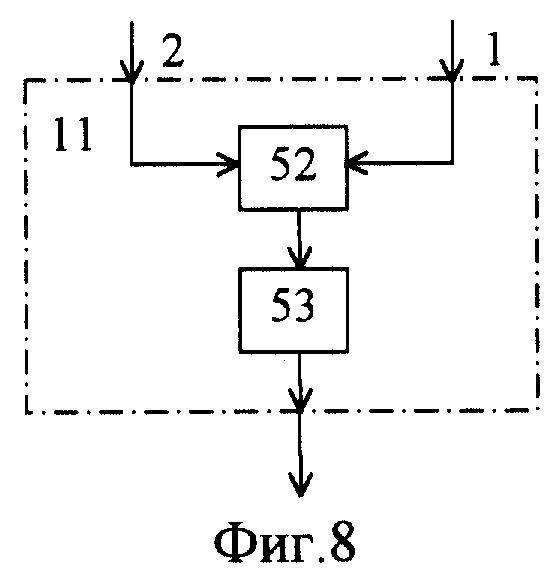
Блок 11 расчёта параметра глубины управления (фиг. 8) содержит делитель 52 и квадратор 53.
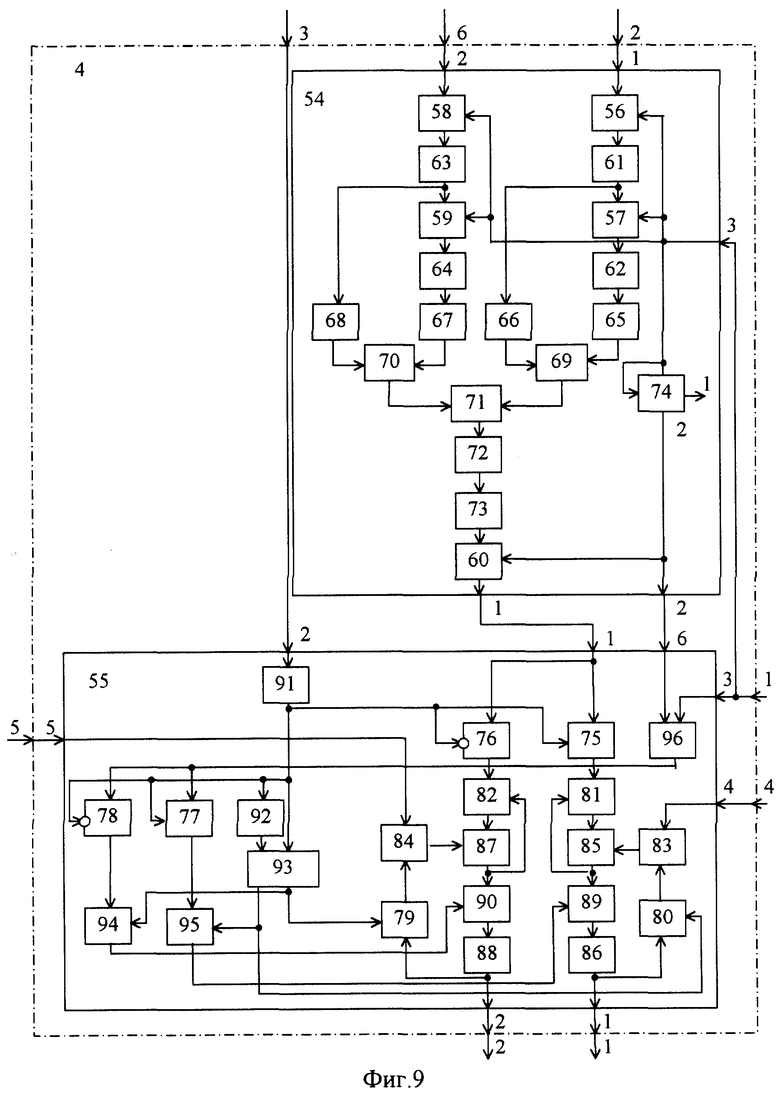
Блок 4 оценки частоты (фиг. 9) содержит блок 54 формирования оценки и блок 55 осреднения.
Блок 54 формирования оценки содержит пять ключей 56-60, четыре запоминающих элемента 61-64, четыре квадратора 65-68, два сумматора 69 и 70, делитель 71, формирователь 72 модуля, нелинейный элемент 73, двухразрядный сдвиговый регистр 74.
Блок 55 осреднения содержит шесть ключей 75-80, четыре сумматора 81-84, четыре запоминающих элемента 85-88, два делителя 89 и 90, элемент 91 задержки, инвертор 92, триггер 93, два счётчика 94 и 95, элемент И 96.
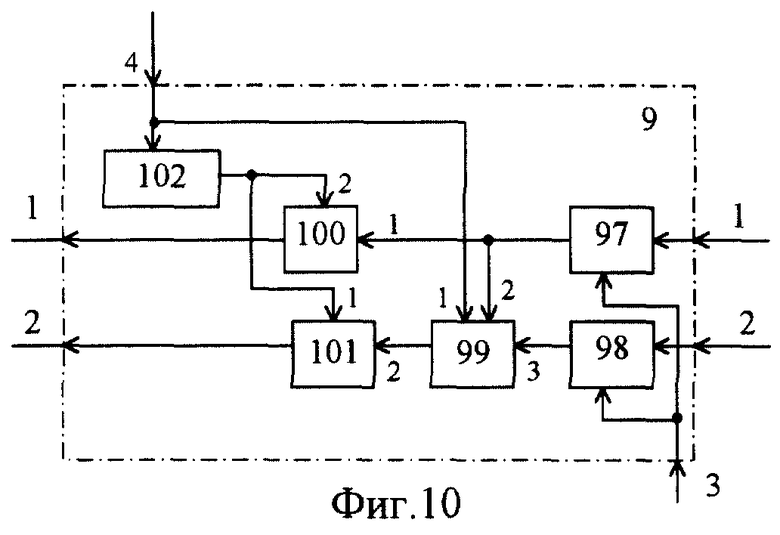
Блок 9 преобразования координат (фиг. 10) содержит два ключа 97 и 98, сумматор 99, два блока умножения 100 и 101, генератор 102 экспоненциального напряжения.
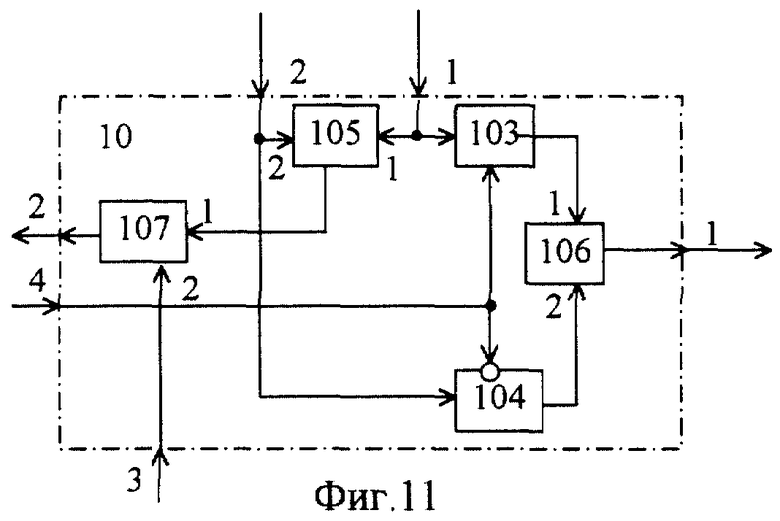
Блок 10 выбора коэффициента диссипации (фиг. 11) содержит два ключа 103 и 104, два сумматора 105 и 106, делитель 107.
Предлагаемое устройство функционирует следующим образом.
После воздействия внешнего возмущающего момента упругий элемент начинает колебаться с максимальной частотой ω mах, поскольку в состоянии покоя жёсткость упругого элемента максимальна (из условия снижения амплитуды колебаний, возникающих от действия внешнего возмущающего импульса).
Датчик 2 отклонения начинает выдавать текущее значение величины обобщённой координаты отклонения упругого элемента, которое поступает на вход дифференцирующего блока 3 и первый вход блока 9 преобразования координат. Текущее значение скорости обобщённой координаты отклонения упругого элемента выдаётся с выхода дифференцирующего блока 3 на второй вход блока 9 преобразования координат. При этом на выходе блока 6 управления сформирован сигнал u=0, поступающий на четвёртый вход блока 10 выбора коэффициента диссипации и обеспечивающий на первом выходе этого блока сигнал b=bmax, который подаётся на четвёртый вход блока 9 преобразования координат.
В случае переключения жесткости упругого элемента с максимальной на минимальную на выходе блока 6 управления формируется сигнал u=1, обеспечивающий на первом выходе блока 10 выбора коэффициента диссипации сигнал b=bmin. Таким образом, блок 10 выбора коэффициента диссипации реализует кусочно-постоянную функцию (5) изменения диссипативного параметра упругой системы синхронно с управляемым изменением её частоты.
Импульсы с генератора 8 тактовых импульсов обеспечивают общую синхронизацию процессов в блоке 9 преобразования координат с процессами в остальной части системы. На первом и втором выходах блока 9 преобразования координат с каждым тактовым импульсом формируются соответственно сигналы  и
и  что соответствует дискретному преобразованию на основе формул (6) (здесь
что соответствует дискретному преобразованию на основе формул (6) (здесь  - период следования импульсов с генератора 8 тактовых импульсов, параметр b изменяется согласно (5)).
- период следования импульсов с генератора 8 тактовых импульсов, параметр b изменяется согласно (5)).
С использованием этой информации в блоке 4 оценки частоты на каждом такте генератора 8 тактовых импульсов формируются оценки максимальной ω
Заметим, что элементы 38, 40, 43 и 46 используются для расчета Т3, а элементы 36, 37, 39, 41, 42, 44-46 - для расчёта T3.
Сформированные сигналы Т2 и T3 используются в блоке 6 управления для настройки параметров линий задержки 18 и 17 соответственно. При первой же смене знака информационного сигнала, поступающего с первого выхода блока 9 преобразования координат на первый вход блока 6 управления, индикатор нуля 14 выдаёт импульс, который через открытый ключ 15 поступает на вход первой линии задержки 17, в которой обеспечивается задержка сигнала на период T3. В течение интервала времени длительностью T3 на выходе триггера 16 гарантирован сигнал u=0, что отвечает установлению максимальной жёсткости упругого элемента в соответствии с законом управления (1).
По окончании этого интервала импульс с выхода первой линии задержки 17 переключает триггер 16 в единичное состояние, благодаря чему устанавливается минимальная жесткость системы. При этом ключ 15 закрывается и блокирует входной информационный канал. Этот же импульс, проходя через вторую линию задержки 18, по истечении интервала времени Т2 переводит триггер 16 в нулевое состояние, благодаря чему в системе устанавливается максимальная жёсткость, и ключ 15 открывается. Система вновь готова реагировать на смену знака информационного сигнала аналогично описанному выше.
В остальном функционирование предлагаемого устройства полностью аналогично известному.
Источники информации
1. Патент РФ № 2192036, G 05 D 19/02, F 16 F 15/00, 2002 (п.1, аналог).
2. А.С. СССР № 1827465, кл.3 F 16 F 6/00, 1991.
3. Шулыман З.П., Кордонский В.И. Магнитореологический эффект. - Минск: Наука и Техника, 1982. - 184 с.
4. Шалимов С. В., Мануйлов Ю.С. Оптимальное повышение диссипации в упругой системе за счёт управления её жёсткостными свойствами // Методы и алгоритмы исследования автоматических систем управления. Вып. 6. - Л.: МО СССР, 1988. - С.26-31.
5. Шалымов С. В. Оптимальное гашение колебаний простых упругих систем с управляемой жёсткостью. - МО РФ, 2001. - 101 с.
6. Патент РФ № 2192035, G 05 D 19/02, F 16 F 15/00, 2002 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192035C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЁСТКОСТИ | 2003 |
|
RU2249244C2 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192662C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2003 |
|
RU2249243C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1988 |
|
SU1587465A1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ВИБРАЦИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2005 |
|
RU2291334C1 |
Изобретение относится к демпфированию колебаний упругих элементов конструкции объектов и может быть преимущественно использовано при проектировании и создании перспективных систем управления объектами нежесткой конструкции. Устройство содержит объект управления (упругий элемент), датчик отклонения упругого элемента, дифференцирующий блок, блок оценки частоты, блок коррекции частоты, блок управления, регулятор жесткости, генератор тактовых импульсов, блок преобразования координат, блок выбора коэффициента диссипации. Технический результат изобретения заключается в упрощении устройства. 5 з.п. ф-лы, 11 ил.
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192035C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192036C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192662C1 |
| US 4633982, 06.01.1987 | |||
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1983 |
|
SU1129585A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1987 |
|
SU1500990A2 |
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1988 |
|
SU1587465A1 |
| Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости | 1989 |
|
SU1596306A1 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| Способ демпфирования вынужденных колебаний объекта | 1990 |
|
SU1787810A1 |
| Демпфер | 1991 |
|
SU1827465A1 |

