Изобретение относится к устройствам для замены звеньев рельсового пути и стрелочных переводов.
Известно устройство для замены стрелочных переводов, содержащее раму, опирающуюся на ходовые тележки, стойки с консолями, установленные на раме с возможностью поворота вокруг вертикальных осей, ферму с грузоподъемным оборудованием, опирающуюся на консоли стоек (SU 1622478, Е 01 В 29/02, 1991 г.).
Известно устройство для замены стрелочных переводов, содержащее опирающуюся на ходовые тележки раму, ферму, установленную на раме при помощи стоек с консолями для опирания фермы, смонтированных на раме с возможностью поворота вокруг вертикальных осей (DE 2817634, Е 01 В 29/02, 1989 г.).
Известен путеукладочный кран, содержащий опирающуюся на ходовые тележки раму, ферму с грузоподъемным оборудованием, установленную на раме при помощи пары стоек с консолями для опирания фермы, смонтированных на одном концевом участке рамы с возможностью поворота вокруг вертикальной оси, расположенной в продольной плоскости симметрии крана (DE 2410718, Е 01 В 29/02, 1975 г.).
При использовании известных устройств для укладки звеньев рельсового пути или звеньев стрелочного перевода, когда ось фермы не совпадает с осью пути, установка звеньев на ось пути осуществляется вручную или с применением при этом специальных приспособлений, что увеличивает время укладки звена рельсового пути или звена стрелочного перевода, а следовательно и стоимость укладки.
Известен путеукладочный кран, преимущественно для замены стрелочных переводов, содержащий опирающуюся на ходовые тележки раму, ферму с грузоподъемным оборудованием, установленную на раме при помощи двух пар стоек, смонтированных на концевых участках рамы с возможностью поворота каждой пары приводами вокруг вертикальной оси, расположенной в продольной плоскости симметрии крана балки для опирания фермы, консольно закрепленные на каждой стойке, причем ферма оперта на упомянутые балки при помощи тележек, в верхних частях которых выполнены криволинейные пазы, в которых размещены криволинейные направляющие фермы, верхние части стоек каждой пары связаны между собой изогнутой в вертикальной плоскости балкой, в верхней части которой выполнено отверстие, в котором размещен палец, закрепленный в верхней части фермы (RU 2072706, Е 01 В 29/02, 1997 г.).
Техническим результатом изобретения является обеспечение работы крана по укладке и замене звеньев рельсового пути или стрелочного перевода в обоих направлениях с улучшением характеристик грузоподъемности и расширением рабочей зоны крана, что ведет к уменьшению стоимости работ по укладке и замене звеньев рельсового пути или стрелочного перевода.
Для достижения этого технического результата в путеукладочном кране, преимущественно для замены стрелочных переводов, содержащем опирающуюся на ходовые тележки раму, ферму с грузоподъемным оборудованием, установленную на раме при помощи двух пар стоек, смонтированных на концевых участках рамы с возможностью поворота каждой пары приводами вокруг вертикальной оси, расположенной в продольной плоскости симметрии балки для опирания фермы, консольно закрепленные на каждой стойке, причем ферма оперта на упомянутые балки при помощи тележек, в верхних частях которых выполнены криволинейные пазы, в которых размещены криволинейные направляющие фермы, верхние части стоек каждой пары связаны между собой изогнутой в вертикальной плоскости балкой, в верхней части которой выполнено отверстие, в котором размещен палец, закрепленный в верхней части фермы, каждое упомянутое отверстие выполнено криволинейным и расположено вдоль соответствующей изогнутой в вертикальной плоскости балки, а каждый упомянутый палец размещен в соответствующем криволинейном отверстии с возможностью перемещения вдоль него, так как криволинейная поверхность, расположенная дальше от центра кривизны, имеет больший радиус в отличии от радиуса криволинейной поверхности, расположенной ближе к центру кривизны.
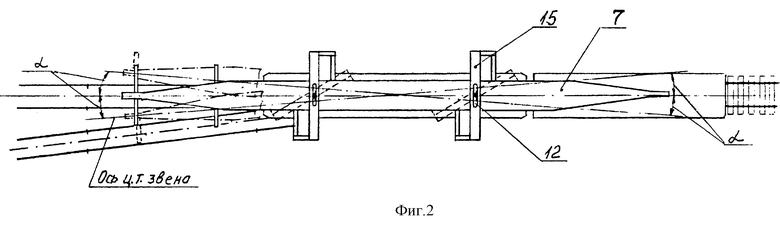
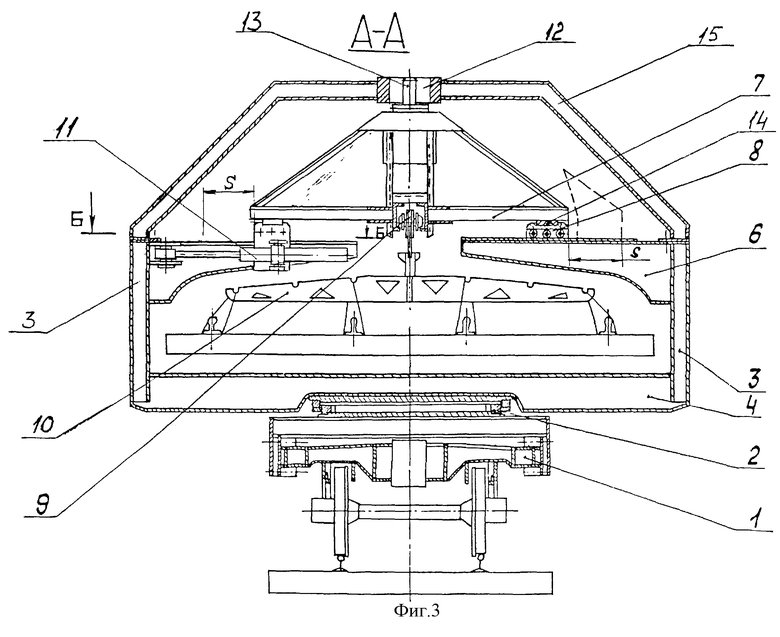
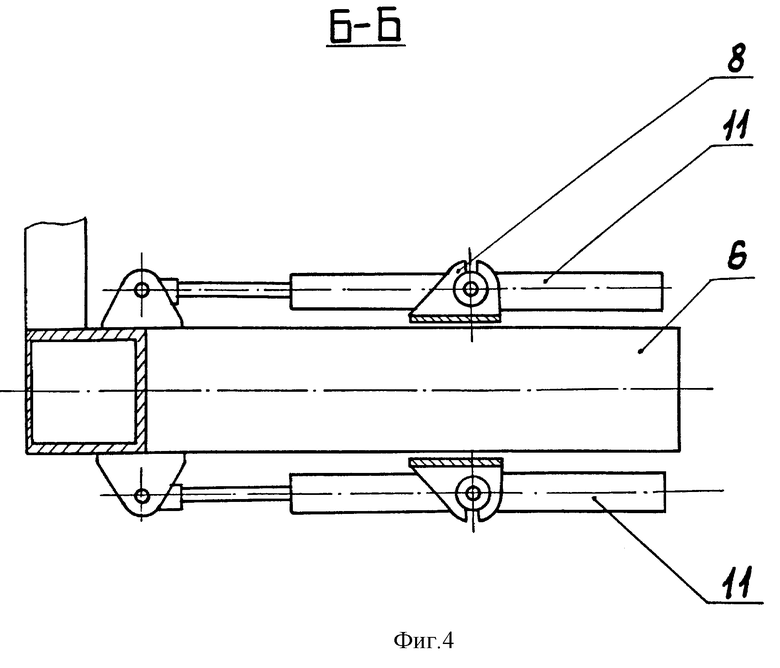
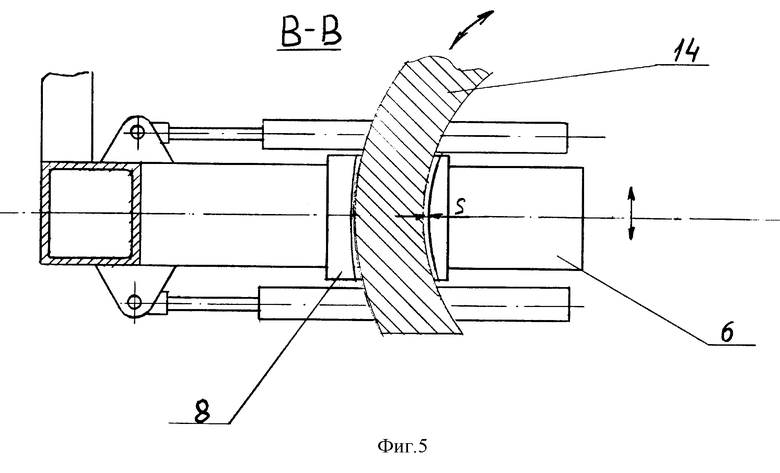
На фиг.1 изображен путеукладочный кран, общий вид; на фиг.2 - то же, вид сверху; на фиг.3 - разрез А-А фиг.1; на фиг.4 - разрез Б-Б фиг.3; на фиг.5 - разрез В-В фиг.3.
Путеукладочный кран содержит самоходную платформу 1, состоящую из рамы, опирающейся на ходовые тележки. На раме платформы 1 установлены опорно-поворотные устройства 2, расположенные на концевых участках рамы. На каждом устройстве 2 смонтирована пара стоек 3, причем стойки 3 каждой пары расположены с разных сторон продольной плоскости симметрии крана и закреплены на основании 4, установленном на поворотной вокруг вертикальной оси части опорно-поворотного устройства 2, которая соединена с приводом 5 ее поворота вокруг вертикальной оси, расположенной в продольной плоскости симметрии крана.
На каждой стойке 3 консольно закреплены балки 6 для опирания фермы 7. Ферма 7 опирается на балки 6 при помощи тележек 8 с катками. На ферме 7 смонтировано грузоподъемное оборудование, включающее в себя грузовые тележки 9, связанные с траверсами 10 для захвата звена рельсового пути или стрелочного перевода, и тяговую и грузовую лебедки (не показаны). При помощи грузовой лебедки осуществляется подъем и опускание траверс 10, несущих звено рельсового пути или стрелочного перевода, а тяговой лебедкой осуществляется перемещение грузовых тележек 9, несущих траверсы 10, вдоль фермы 7.
В транспортном положении крана каждая пара стоек 3 соответствующим приводом 5 повернута относительно продольной плоскости симметрии крана (на фиг.2 их положение показано пунктирными линиями). В рабочем положении крана каждая пара стоек 3 устанавливается перпендикулярно продольной плоскости симметрии крана (оси пути), при этом расстояние между стойками 3 каждой пары составляет 5620 мм, что позволяет обеспечить свободное перемещение между ними собранного закрестовинного блока, который имеет длину наибольшего бруса, равную 5500 мм.
Ферма 7 установлена на каждой паре стоек 3 с возможностью ограниченного перемещения приводами 11 относительно балок 6, при этом при перемещении одного конца фермы 7 другой ее конец перемещается в противоположную сторону от продольной плоскости симметрии крана на такую же величину. Верхние части стоек 3 каждой пары связаны между собой балкой 15, изогнутой в вертикальной плоскости и в верхней части которой выполнено криволинейное отверстие 12 (фиг. 2). В каждом отверстии 12 размещен палец 13, закрепленный на ферме 7. Отверстие 12 расположено вдоль балки 15. Отверстие 12 и расположенный в нем палец 13 предназначены для фиксации фермы 7 от перемещения ее вдоль крана и для симметричного поворота фермы 7 относительно продольной плоскости симметрии крана в обе стороны от нее на равные углы (см. фиг.2).
В верхних частях тележек 8 выполнены криволинейные пазы, а на ферме 7 выполнены или закреплены криволинейные направляющие 14, размещенные в этих пазах. При переводе стоек 3 из транспортного положения в рабочее происходит поворот каждой пары стоек 3 относительно вертикальной оси, при этом тележки 8 неподвижны и занимают среднее положение относительно балок 6, направляющие 14 на ферме 7 скользят по криволинейным пазам тележек 8.
Перемещение фермы 7 относительно продольной плоскости симметрии крана осуществляется приводами 11, закрепленными на балках 6 каждой стойки 3 и работающими в противоположных направлениях стоек 3 каждой пары. Под воздействием усилий от приводов 11 тележки 8 перемещаются вдоль балок 6, причем тележки 8 выполнены с выступами для фиксации их от перемещения поперек балок 6. Криволинейные пазы в верхних частях тележек 8 своими стенками взаимодействуют с направляющими 14, выполненными или закрепленными на ферме 7, и при этом происходит перемещение фермы 7 в ту или другую сторону от продольной плоскости симметрии крана с поворотом фермы 7 относительно этой плоскости на необходимый угол и относительно стоек 3, а также проскальзывание направляющих 14 фермы 7 относительно криволинейных пазов тележек 8.
Возможность сложного движения фермы 7 (поворот и поперечное перемещение ее) относительно тележек 8 обеспечивается за счет выполнения на тележках 8 криволинейных пазов, имеющих разную кривизну криволинейных поверхностей, и криволинейных направляющих 14, выполненных на ферме 7, а также возможности перемещения пальца 13, закрепленного на ферме 7, по криволинейному отверстию 12, выполненному в балке 15. Криволинейная поверхность каждого криволинейного паза, расположенная дальше от центра кривизны, имеет больший радиус в отличии от радиуса криволинейной поверхности, расположенной ближе к центру кривизны. Сочетание этих двух криволинейных поверхностей в каждом пазу соответствующей тележки 8 и соответствующие зазоры между ними и соответствующей направляющей 14, а также возможность перемещения пальца 13 вдоль криволинейного отверстия 12 позволяют производить ферме 7 два движения - поворот и поперечное перемещение.
Кран работает следующим образом.
После прибытия крана к месту проведения работ по замене или укладке звеньев рельсового пути или стрелочного перевода каждая пара стоек 3 и соединяющая их балка 15 приводами 5 устанавливается перпендикулярно продольной плоскости симметрии крана. При разборке пути или стрелочного перевода грузовые тележки 9 с траверсами 10 перемещаются к переднему по направлению работы крана концевому участку его, траверсы 10 опускаются, производится захват звена рельсового пути или стрелочного перевода, затем звено поднимается и тележкой 9 перемещается вдоль фермы 7, затем звено укладывается на платформу для транспортировки. Таким образом производится снятие с пути всех его звеньев или звеньев стрелочного перевода. Укладка новых звеньев производится в обратном порядке.
При необходимости укладки звена на ось пути или снятия звена, когда ось пути ответвляется от прямолинейного направления, перед захватом звена траверсами 10 производится перемещение переднего концевого участка фермы 7 вдоль балок 6 с ее поворотом относительно продольной плоскости симметрии крана на необходимый угол, при этом задний концевой участок фермы 7 перемещается в противоположную сторону от продольной плоскости симметрии крана. Перемещение фермы 7 производится приводами 11, закрепленными на каждой балке 6, одновременно на одинаковую величину в соответствующую сторону от продольной плоскости симметрии крана. Затем звено захватывается траверсами 10 и поднимается на необходимую высоту. Ферма 7 возвращается в исходное положение, звено перемещается вдоль фермы 7 и укладывается на платформу. Когда необходимо уложить звено, оно размещается над зоной укладки, производится перемещение фермы 7 поперек крана с поворотом ее на необходимый угол, опускание звена и укладка его на основание пути.
Перемещение концевых участков фермы 7 на одинаковую величину в разные стороны относительно продольной плоскости симметрии крана позволяет увеличить его грузоподъемность, зависящую от соответствующих параметров опрокидывания крана. При минимальных перемещениях фермы 7 в зонах каждой пары стоек 3 получается максимальное перемещение концевых участков фермы 7 относительно оси пути.
Кран обеспечивает производство работ в обоих направлениях без предварительной ориентации его или фиксации или расфиксации соответствующих концевых участков фермы 7.
Таким образом, кран обеспечивает работы по укладке и замене звеньев рельсового пути или стрелочного перевода в обоих направлениях с улучшением характеристик грузоподъемности и расширением рабочей зоны крана, что ведет к уменьшению стоимости работ по укладке и замене звеньев рельсового пути или стрелочного перевода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУТЕУКЛАДОЧНЫЙ КРАН | 1994 |
|
RU2072706C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2193616C2 |
| СОСТАВ ДЛЯ ТРАНСПОРТИРОВАНИЯ ЗВЕНЬЕВ СТРЕЛОЧНОГО ПЕРЕВОДА | 1996 |
|
RU2098537C1 |
| ПУТЕУКЛАДОЧНЫЙ КРАН | 1999 |
|
RU2171327C1 |
| ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2078868C1 |
| ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2107123C1 |
| РАБОЧИЙ ОРГАН ШПАЛОПОДБИВОЧНОЙ МАШИНЫ | 1994 |
|
RU2054077C1 |
| МАШИНА ДЛЯ РИХТОВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1997 |
|
RU2112827C1 |
| УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПОВОРОТА ТЕЛЕЖКИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2047522C1 |
| ПУТЕВАЯ МАШИНА | 1993 |
|
RU2045600C1 |
Изобретение относится к устройствам для замены звеньев рельсового пути и стрелочных переводов. Путеукладочный кран содержит опирающуюся на ходовые тележки раму, ферму с грузоподъемным оборудованием, установленную на раме при помощи двух пар стоек. Стойки смонтированы на концевых участках рамы с возможностью поворота приводами вокруг вертикальной оси, расположенной в продольной плоскости симметрии крана. Балки для опирания фермы консольно закреплены на каждой стойке. Причем ферма оперта на упомянутые балки при помощи тележек, в верхних частях которых выполнены криволинейные пазы, в которых размещены криволинейные направляющие фермы. Верхние части стоек каждой пары связаны между собой изогнутой в вертикальной плоскости балкой, в верхней части которой выполнено отверстие. В отверстии размещен палец, закрепленный в верхней части фермы. Причем каждое упомянутое отверстие выполнено криволинейным и расположено вдоль соответствующей изогнутой в вертикальной плоскости балки. Каждый упомянутый палец размещен в соответствующем криволинейном отверстии с возможностью перемещения вдоль него, при этом криволинейные поверхности упомянутых пазов имеют разную кривизну. Так криволинейная поверхность, расположенная дальше от центра кривизны, имеет больший радиус в отличие от радиуса криволинейной поверхности, расположенной ближе к центру кривизны. Техническим результатом изобретения является обеспечение работы крана в обоих направлениях с улучшением характеристик грузоподъемности и расширением рабочей зоны крана, что ведет к уменьшению стоимости работ. 5 ил.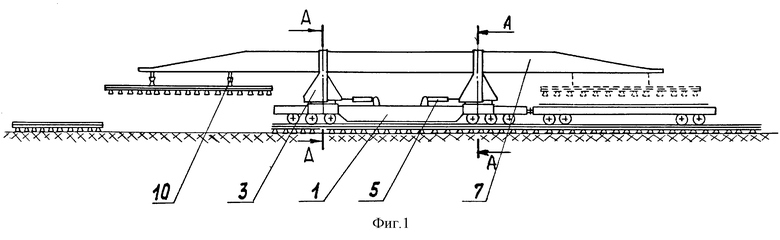
Путеукладочный кран, преимущественно для замены стрелочных переводов, содержащий опирающуюся на ходовые тележки раму, ферму с грузоподъемным оборудованием, установленную на раме при помощи двух пар стоек, смонтированных на концевых участках рамы с возможностью поворота каждой пары приводами вокруг вертикальной оси, расположенной в продольной плоскости симметрии крана, балки для опирания фермы, консольно закрепленные на каждой стойке, причем ферма оперта на упомянутые балки при помощи тележек, в верхних частях которых выполнены криволинейные пазы, в которых размещены криволинейные направляющие фермы, верхние части стоек каждой пары связаны между собой изогнутой в вертикальной плоскости балкой, в верхней части которой выполнено отверстие, в котором размещен палец, закрепленный в верхней части фермы, отличающийся тем, что каждое упомянутое отверстие выполнено криволинейным и расположено вдоль соответствующей изогнутой в вертикальной плоскости балки, а каждый упомянутый палец размещен в соответствующем криволинейном отверстии с возможностью перемещения вдоль него, при этом криволинейные поверхности упомянутых пазов имеют разную кривизну, так криволинейная поверхность, расположенная дальше от центра кривизны, имеет больший радиус в отличие от радиуса криволинейной поверхности, расположенной ближе к центру кривизны.
| RU 94041925 А1, 10.08.1996 | |||
| РЕЛЬСОПОГРУЗОЧНЫЙ ПОЕЗД ДЛЯ ТРАНСПОРТИРОВКИ, ПОГРУЗКИ И РАЗГРУЗКИ ДЛИННЫХ РЕЛЬСОВ | 1995 |
|
RU2093634C1 |
| Транспортное средство для транспортировки,погрузки и выгрузки длинномерных изделий | 1984 |
|
SU1221272A1 |
| US 5657888, 19.08.1997 | |||
| GB 1514528, 14.06.1978. | |||

