Изобретение относится к области радиотехники и может быть использовано в следящих измерителях угловых координат.
Известен способ обработки сигналов при одноканальной амплитудной пеленгации, при котором формируют диаграмму направленности (ДН), производят ее коническое развертывание, принимают сигнал, селектируют его по частоте, детектируют по амплитуде, разлагают на ортогональные составляющие, пропорциональные угловым рассогласованиям по азимуту и углу места [Теоретические основы радиолокации./Под ред. Я.Д. Ширмана, М., Сов. Радио, 1970, стр.294-296].
Недостатком этого способа является зависимость крутизны дискриминационной характеристики от уровня принимаемого сигнала и наличие у нее участков с отрицательной крутизной.
Известен также способ обработки сигналов при одноканальной амплитудной пеленгации [там же, стр.296], принятый за прототип, при котором последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности, производят их попарное переключение в плоскостях пеленгации, принимают сигнал, селектируют его по частоте, детектируют по амплитуде, демодулируют по частоте переключения, выделяя сигналы рассогласования по азимуту и углу места.
Недостатком прототипа, как и у аналога, является зависимость крутизны дискриминационной характеристики от уровня принимаемого сигнала и наличие у нее участков с отрицательной крутизной, что затрудняет его использование в следящих измерителях угловых координат при динамическом диапазоне пеленгуемых сигналов более 10 дБ, а также снижает их быстродействие при больших рассогласованиях (на участке дискриминационной характеристики с отрицательной крутизной).
Целью настоящего изобретения является расширение динамического диапазона пеленгуемых сигналов и приведение формы дискриминационной характеристики к виду, обеспечивающему наискорейшую отработку рассогласования следящей системой.
Для достижения поставленной цели предлагается способ обработки сигналов при одноканальной амплитудной пеленгации, при котором последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности, принимают сигнал, селектируют его по частоте, детектируют по амплитуде, демодулируют по частоте переключения.
Согласно изобретению после формирования каждой из диаграмм направленности формируют диаграмму направленности в направлении "холодное небо" (пространственное направление, где влияние пеленгуемого и других мешающих источников практически не сказывается на общий шумовой фон), производят переключение каждой смещенной относительно равносигнального направления диаграммы направленности с диаграммой направленности в направлении "холодное небо", после демодуляции сигналы запоминают, вычисляют суммарные сигналы в плоскостях пеленгации и по максимальному из них устанавливают коэффициент передачи тракта, при последующих переключениях в каждой плоскости пеленгации вычисляют разность Δ, сумму Σ и произведение П сигналов, формируют дискриминационные характеристики путем нормировки разности сигналов к их сумме и произведению, выравнивают их по крутизне и форме, определяют рассогласование
где UПОР1, UПОР2 - некоторые пороговые значения.
Сочетание отличительных признаков и свойства предлагаемого изобретения из литературы неизвестны, поэтому оно соответствует критериям новизны и изобретательского уровня.
На фиг. 1 приведена структурная электрическая схема устройства, реализующего предлагаемый способ, на фиг.2 - диаграммы, поясняющие работу схемы, на фиг.3 - диаграммы, поясняющие принцип формирования дискриминационной характеристики.
При реализации предлагаемого способа выполняется следующая последовательность операций:
- последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности;
- после формирования каждой из диаграмм направленности формируют диаграмму направленности в направлении "холодное небо";
- производят переключение каждой смещенной относительно равносигнального направления диаграммы направленности с диаграммой направленности в направлении "холодное небо";
- принимают сигнал;
- селектируют его по частоте;
- детектируют по амплитуде;
- демодулируют по частоте переключения;
- запоминают демодулированные сигналы;
- вычисляют суммарные сигналы в плоскостях пеленгации и по максимальному из них устанавливают коэффициент передачи тракта;
- при последующих переключениях в каждой плоскости пеленгации вычисляют разность Δ, сумму Σ и произведение П сигналов;
- формируют дискриминационные характеристики путем нормировки разности сигналов к их сумме и произведению;
- выравнивают их по крутизне и форме;
- определяют рассогласование
где UПОР1, UПОР2 - некоторые пороговые значения.
Устройство, реализующее предлагаемый способ (фиг.1), содержит последовательно соединенные фазированную антенную решетку ФАР 1, радиоприемное устройство РПУ 2, амплитудный детектор АД 3, фазовый детектор ФД 4, фильтр нижних частот ФНЧ 5, запоминающее устройство ЗУ 6, а также вычислитель В 7, умножители на постоянный коэффициент УПК1 8, УПК2 9, нелинейные элементы НЭ1 10, НЭ2 11, блоки пороговых устройств БПУ1 12, БПУ2 13, коммутаторы К1 14, К2 15, логические устройства ЛУ1 16, ЛУ2 17, блок индикации БИ 18, устройство управления диаграммой направленности УУДН 19, генератор Г 20 и устройство управления УУ 21. Выходы с первого по четвертый ЗУ 6 соединены с соответствующими входами вычислителя 7, выходы которого первый - через УПК1 8 и второй - через НЭ1 10 соединены со входами коммутатора К1 14, третий и четвертый через блок пороговых устройств БПУ1 12 - со входом первого логического устройства ЛУ1 16, пятый и шестой через блок пороговых устройств БПУ2 13 - со входом второго логического устройства ЛУ2 17, седьмой - через УПК2 9 и восьмой - через НЭ2 11 - со входами коммутатора К2 15, девятый - с управляющим входом РПУ 2. Первый и второй выходы логических устройств ЛУ1 16, ЛУ2 17 соединены соответственно с управляющими входами коммутаторов К1 14, К2 15 и со входами блока индикации БИ 18. Выходы с первого по пятый устройства управления УУ 21 соединены соответственно первый и второй - со входами устройства управления диаграммой направленности УУДН 19, третий и четвертый - со входами запоминающего устройства ЗУ 6 и пятый с управляющим входом вычислителя В 7. Выход устройства управления диаграммой направленности УУДН 19 соединен с управляющим входом ФАР 1. Первый и второй выходы генератора Г 20 соединены, первый - с третьим входом УУДН 19 и с опорным входом фазового детектора ФД 4, а второй - с входом устройства управления УУ 21. Второй вход устройства управления УУ 21 соединен с клеммой разрешения пеленгации РП. Выходы коммутаторов К1 14 и К2 15 являются выходами устройства.
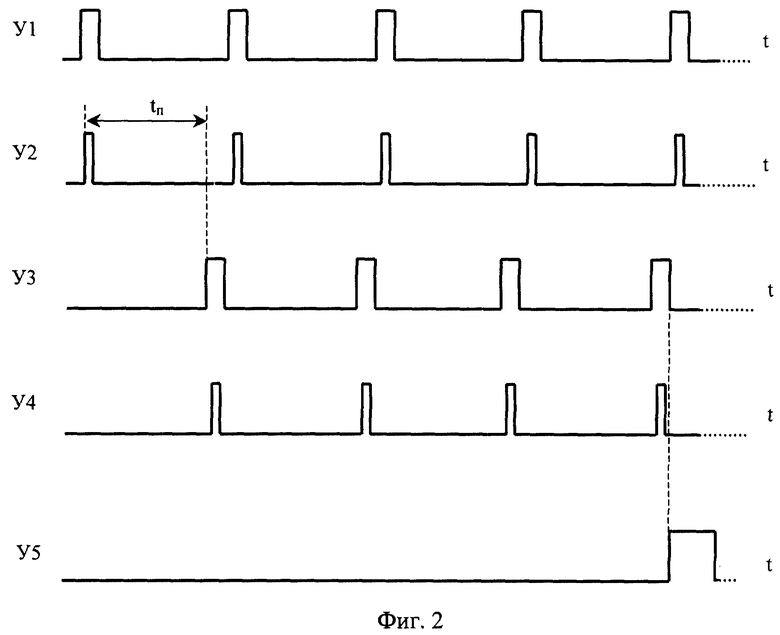
Устройство работает следующим образом. По приходу разрешающего сигнала на клемму РП с использованием сигнала от генератора Г 20 устройство управления УУ 21 формирует коды двух диаграмм направленности, первой - в направлении "холодное небо" и второй - в направлении, смещенном вниз относительно равносигнального направления (РСН) в угломестной плоскости (см. фиг. 2, диаграмма У1, первый импульс). По стробирующему сигналу от УУ 21 (см. фиг. 2, диаграмма У2, первый импульс) производится запись сформированных кодов в УУДН 19.
УУДН 19 производит переключение этих диаграмм направленности с частотой манипуляции fСК, поступающей от генератора Г 20.
Принятый ФАР 1 сигнал селектируется по частоте РПУ 2, детектируется по амплитуде АД 3, демодулируется по частоте манипуляции ФД 4 с последующим выделением постоянной составляющей демодудированного сигнала ФНЧ 5. По истечении времени переходного процесса tП в ФНЧ 5 УУ 21 формирует код адреса для записи полученной амплитуды D1 в ЗУ 6 (см. фиг.2, диаграмма У3, первый импульс), представляющее собой аналого-цифровой преобразователь с регистром памяти по выходу, которая производится по стробирующему сигналу от УУ 21 (см. фиг.2, диаграмма У4, первый импульс). Аналогичным образом производится получение амплитуд D2, D3, D4 (см. фиг.2, вышеуказанные диаграммы для второго, третьего и четвертого импульсов) с тем отличием, что при получении амплитуды D2 производится манипуляция диаграмм направленности в направлениях "холодное небо" и в направлении, смещенном вверх относительно РСН в угломестной плоскости, при получении амплитуды D3 производится манипуляция диаграмм направленности в направлениях "холодное небо" и в направлении, смещенном влево относительно РСН в азимутальной плоскости, при получении амплитуды D4 производится манипуляция диаграмм направленности в направлениях "холодное небо" и в направлении, смещенном вправо относительно РСН в азимутальной плоскости.
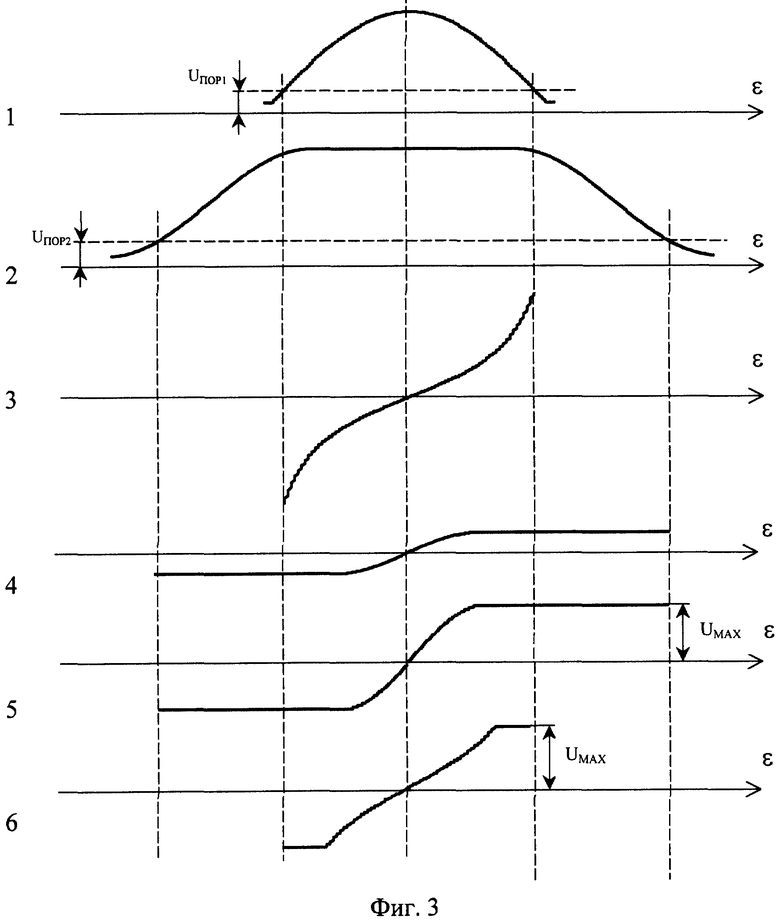
После окончания записи амплитуд D1...D4 УУ 21 выдает на вычислитель В 7 сигнал разрешения счета (см. фиг.2, диаграмма У5). По этому сигналу В 7 в первом цикле для каждой плоскости пеленгации производит вычисление сумм D1+D2 и D3+D4 и по максимальной из них формирует сигнал управления коэффициентом передачи РПУ 2, сохраняемый до окончания пеленгации. При последующих циклах для каждой плоскости пеленгации В 7 производит вычисление произведения D1•D2 (D3•D4), суммы D1+D2 (D3+D4) и дискриминационных характеристик, нормированных к произведению
и к сумме
(см. фиг.3 соответственно, диаграммы 1...4). Вычисленные значения хранятся в В 7 до окончания следующего цикла, после чего производится их обновление.
С помощью умножителей на постоянный коэффициент УПК1 8 и УПК2 9 производится приведение крутизны дискриминационной характеристики по каналу суммы к крутизне по каналу произведения (см. фиг.3 диаграмма 5). С помощью нелинейных элементов НЭ1 10 и НЭ2 11 производится ограничение дискриминационной характеристики по каналу произведения по уровню максимальной амплитуды в суммарном канале Umax.
С помощью БПУ1 12, ЛУ1 16 и БПУ2 13, ЛУ2 17 производится управление коммутаторами К1 14 и К2 15 и индикацией отсутствия сигнала в БИ 18 по алгоритму
где Δ = D1-D2 (D3-D4);
П=Dl•D2 (D3•D4);
Σ=D1+D2 (D3+D4);
UПОР1, UПОР2 - пороговые значения, выбираемые по заданным вероятностным характеристикам обнаружения.
Работа устройства продолжается до снятия сигнала РП. По приходу следующего сигнала РП производится повторение вышесказанных операций.
Введение операций по формированию дискриминационной характеристики специального вида и установки коэффициента передачи тракта по максимальному из суммарных сигналов в плоскостях пеленгации позволило расширить динамический диапазон пеленгуемых сигналов до 60 дБ и повысить быстродействие следящей системы более чем на 25%.
В Ростовском-на-Дону НИИ радиосвязи был изготовлен и испытан макет устройства, реализующего предлагаемый способ. Результаты испытаний полностью подтвердили расчетные характеристики устройства.
Изобретение относится к области радиотехники и может быть использовано в следящих измерителях угловых координат. Достигаемым техническим результатом является расширение динамического диапазона пеленгуемых сигналов и приведение формы дискриминационной характеристики к виду, обеспечивающему наискорейшую отработку рассогласования следящей системой. Способ включает операции: последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности, после формирования каждой из диаграмм направленности формируют диаграмму направленности в направлении "холодное небо", производят переключение каждой смещенной относительно равносигнального направления диаграммы направленности с диаграммой направленности в направлении "холодное небо", принимают сигнал, селектируют его по частоте, детектируют по амплитуде, демодулируют по частоте переключения, запоминают демодулированные сигналы, вычисляют суммарные сигналы в плоскостях пеленгации и по максимальному из них устанавливают коэффициент передачи тракта, при последующих переключениях в каждой плоскости пеленгации вычисляют разность Δ, сумму Σ и произведение П сигналов, формируют дискриминационные характеристики путем нормировки разности сигналов к их сумме и произведению, выравнивают их по крутизне и форме, определяют рассогласование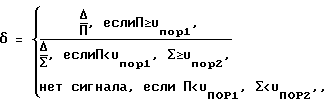
где Uпор1, Uпор2 - некоторые пороговые значения. 3 ил.
Способ обработки сигналов при одноканальной амплитудной пеленгации, при котором последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности, принимают сигнал, селектируют его по частоте, детектируют по амплитуде и демодулируют по частоте переключения, отличающийся тем, что после формирования каждой из диаграмм направленности формируют диаграмму направленности в направлении "холодное небо", производят переключение каждой из смещенной относительно равносигнального направления диаграммы направленности с диаграммой направленности в направлении "холодное небо", а после демодуляции сигналы запоминают, вычисляют суммарные сигналы в плоскостях пеленгации и по максимальному из них устанавливают коэффициент передачи тракта, при последующих переключениях в каждой плоскости пеленгации вычисляют разность Δ, сумму Σ и произведение П сигналов, формируют дискриминационные характеристики путем нормировки разности сигналов к их сумме и произведению, выравнивают дискриминационные характеристики по крутизне и форме, после чего определяют рассогласование
где UПОР1, UПОР2 - некоторые пороговые значения.
| ШИРМАН Я.Д | |||
| Теоретические основы радиолокации | |||
| - М.: Сов | |||
| радио, 1970, с | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1996 |
|
RU2107305C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПСИХОФИЗИЧЕСКОГО СОСТОЯНИЯ СТУДЕНТА ГУМАНИТАРНОГО ВУЗА | 2006 |
|
RU2317767C1 |
| Объемный насос | 1986 |
|
SU1402711A2 |

