Изобретение относится к радиотехнике и может быть использовано для обработки сигналов при одноканальной амплитудной пеленгации.
Известен способ обработки сигналов при одноканальной амплитудной пеленгации, при котором формируют диаграмму направленности (ДН), производят ее коническое развертывание, принимают сигнал, селектируют его по частоте, детектируют по амплитуде, разлагают на ортогональные составляющие, пропорциональные угловым рассогласованиям по азимуту Δβ и углу места Δε. [Теоретические основы радиолокации/Под ред. Я.Д. Ширмана.- М.: Сов. pадио, 1970, с. 294-296].
Недостатком этого способа является низкая точность пеленгования, обусловленная непостоянством крутизны пеленгационной характеристики при большом (более 60 дБ) динамическом диапазоне изменения уровней сигналов.
Известен также способ обработки сигналов при одноканальной амплитудной пеленгации [там же, стр. 296], принятый за прототип, при котором последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности W1, W2, W3, W4, производят их попарное переключение в плоскостях пеленгации, принимают сигнал, селектируют его по частоте, детектируют по амплитуде, демодулируют по частоте переключения, выделяя сигналы рассогласования по азимуту Δβ = W2-W4 и углу места Δε = W1-W3.
Недостатком прототипа, как и аналога, является низкая точность пеленгования, обусловленная непостоянством крутизны пеленгационной характеристики при большом (более 60 дБ) динамическом диапазоне изменения уровней сигналов.
Целью настоящего изобретения является повышение точности пеленгования при большом динамическом диапазоне изменения уровней сигналов.
Для достижения поставленной цели предлагается способ обработки сигналов при одноканальной амплитудной пеленгации, при котором последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности W1, W2, W3, W4, производят их попарное переключение в плоскостях пеленгации, принимают сигнал, селектируют его по частоте, детектируют по амплитуде, демодулируют по частоте переключения, выделяя сигналы рассогласования по азимуту Δβ = W2-W4 и углу места Δε = W1-W3.
Согласно изобретению перед попарным переключением диаграмм направленности в плоскостях пеленгации манипулируют каждой из последовательно сформированных диаграмм направленности W1, W2, W3, W4 с положением диаграммы направленности в направлении "чистое небо" W5, демодулируют сигналы по частоте манипуляции, выделяют сигналы W1-W5, W2-W5, W3-W5, W4-W5, вычисляют суммарные сигналы в плоскостях пеленгации (W1-W5)+(W3-W5), (W2-W5)+(W4-W5) и нормируют сигналы рассогласования Δβ и Δε к соответствующим суммарным сигналам

получая соответствующие рассогласования в плоскостях пеленгации Δβ′, Δε′.
Сочетание отличительных признаков и свойства предлагаемого изобретения из литературы не известны, поэтому оно соответствует критериям новизны и изобретательского уровня.
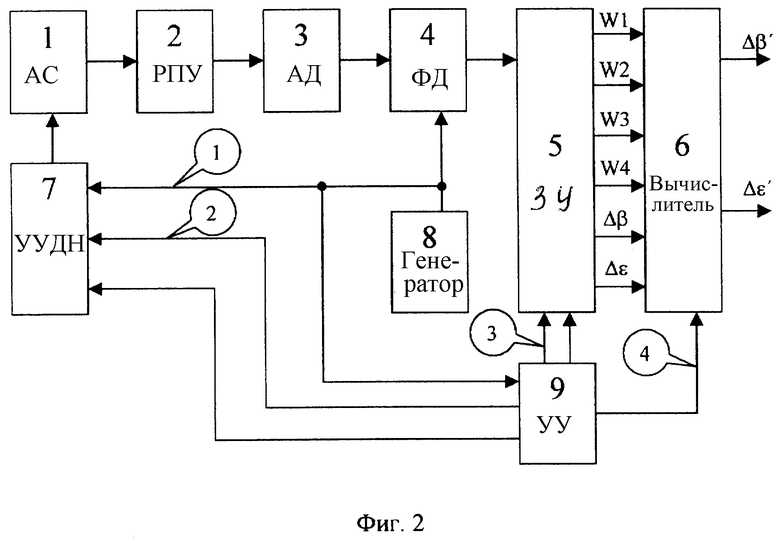
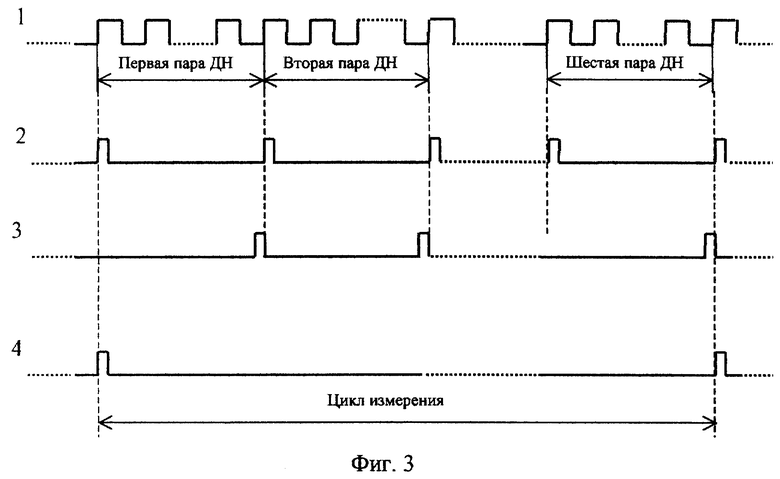
На фиг. 1 приведено расположение лучей ДН; на фиг. 2 приведена структурная электрическая схема устройства, реализующего предлагаемый способ; на фиг. 3 приведена временная диаграмма работы устройства управления.
При реализации предлагаемого способа выполняется следующая последовательность операций:
- последовательно формируют четыре симметрично смещенные относительно равносигнального направления ДН W1,W2,W3,W4;
- последовательно манипулируют каждой из сформированных ДН W1, W2, W3, W4 с положением ДН в направлении "чистое небо" W5 (фиг. 1);
- попарно манипулируют каждой из сформированных ДН W1, W2, W3, W4 в плоскостях пеленгации;
- принимают сигнал;
- селектируют сигнал по частоте;
- детектируют по амплитуде;
- демодулируют сигнал по частоте манипуляции;
- выделяют сигналы W1-W5, W2-W5, W3-W5, W4-W5;
- вычисляют суммарные сигналы в плоскостях пеленгации (W1-W5)+(W3-W5), (W2-W5)+(W4-W5);
- демодулируют сигналы по частоте переключения в каждой плоскости пеленгации;
- выделяют сигналы рассогласования по азимуту Δβ = W2-W4 и углу места Δε = W1-W3;
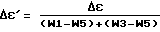
- нормируя сигналы рассогласования Δβ и Δε к соответствующим суммарным сигналам

получают соответствующие рассогласования в плоскостях пеленгации Δβ′и Δε′.
Устройство, реализующее предлагаемый способ (фиг. 2), содержит последовательно соединенные антенную систему на базе фазированной антенной решетки (АС) 1, радиоприемное устройство (РПУ)2, амплитудный детектор (АД)3, фазовый детектор (ФД)4, запоминающее устройство (ЗУ)5 и вычислитель 6, а также устройство управления диаграммой направленности (УУДН)7, генератор 8 и устройство управления (УУ)9. Выход генератора 8 связан с входами УУДН 7 и ФД 4, второй выход генератора 8 связан с входом УУ 9, выход УУДН 7 связан с входом АС 1, первый и второй выходы УУ 9 связаны с другими входами УУДН 7, третий, четвертый и пятый выходы соответственно с входами ЗУ 5 и вычислителя 6, выходы вычислителя 6 Δβ′и Δε′ являются выходами устройства.
Устройство работает следующим образом. Устройство управления 9 последовательно формирует пары ДН со следующими координатами луча по азимуту и углу места: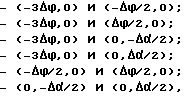
где Δϕ,Δα- ширина луча ДН соответственно по азимуту и углу места. Временной интервал между сформированными парами ДН выбирается таким образом, чтобы к моменту измерения уровня сигнала на выходе фазового детектора 4 в его цепях обеспечивалось окончание переходных процессов.
Сформированная пара ДН поступает в УУДН 7, где записывается по сигналу записи от УУ 9 (осциллограмма 2, фиг. 3).
По сигналу от генератора 8 (осциллограмма 1, фиг. 3) с помощью УУДН 7 производится манипулирование ДН из одного положения в другое.
Сигнал от источника радиоизлучения принимается антенной системой 1, селектируется по частоте РПУ 2, возводится в квадрат амплитудным детектором 3 и демодулируется по частоте манипуляции фазовым детектором 4. По окончании переходных процессов в фазовом детекторе 4 УУ 9 выдает сигналы номера записываемого сигнала, соответствующего номеру манипулированной пары (от 1 до 6) и сигнал записи в запоминающее устройство 5 (осциллограмма 3, фиг. 3), представляющее собой аналого-цифровой преобразователь с регистром памяти. После каждого измерения в устройстве 5 фиксируется два параметра - амплитуда сигнала с выхода фазового детектора 4 и номер манипулированной пары ДН. По окончании шестого измерения устройство управления 9 выдает сигнал отсчета (осциллограмма 4, фиг. 3) в вычислитель 6 на начало вычислений Δβ′и Δε′. Вычисление рассогласований по азимуту Δβ′ и углу места Δε′ производится по формулам

W1 - амплитуда сигнала первой ДН на выходе ФД 4;
W2 - амплитуда сигнала второй ДН на выходе ФД 4;
W3 - амплитуда сигнала третьей ДН на выходе ФД 4;
W4 - амплитуда сигнала четвертой ДН на выходе ФД 4;
W5 - амплитуда сигнала пятой ДН на выходе ФД 4;
Δβ- амплитуда сигнала на выходе ФД 4, измеренная при переключении второй и четвертой ДН;
Δε- амплитуда сигнала на выходе ФД 4, измеренная при переключении первой и третьей ДН;
Дальнейшая работа устройства повторяет вышесказанный цикл измерения.
Введение операции нормировки сигналов рассогласования Δβ и Δε к соответствующим суммарным сигналам позволило более чем в два раза повысить точность пеленгования при большом (более 60 дБ) динамическом диапазоне измерения уровней сигналов за счет стабилизации крутизны пеленгационной характеристики.
В Ростовском НИИ радиосвязи был изготовлен и испытан макет устройства, реализующего предлагаемый способ. Результаты испытаний полностью подтвердили расчетные характеристики устройства.
Изобретение относится к радиотехнике и может быть использовано для обработки сигналов при одноканальной амплитудной пеленгации. Технический результат - повышение точности пеленгирования при большом динамическом диапазоне изменения уровней сигналов. Способ включает следующие операции: формируют ДН, последовательно манипулируют каждой из сформированных ДН W1, W2, W3, W4 с положением ДН в направлении "холодное небо" W5; попарно манипулируют каждой из сформированных ДН W1, W2, W3, W4 в плоскостях пеленгации; принимают сигнал; селектируют сигнал по частоте, демодулируют сигнал по частоте манипуляции; выделяют сигналы W1-W5, W2-W5, W3-W5, W4-W5; вычисляют суммарные сигналы в плоскостях пеленгации (W1-W5)+(W3-W5),(W2-W5)+(W4-W5); демодулируют сигналы по частоте переключения в каждой плоскости пеленгации; выделяют сигналы рассогласования по азимуту Δβ = W2-W4 и углу места Δε = W1-W3; нормируя сигналы рассогласования Δβ и Δε к соответствующим суммарным сигналам
 получают соответствующие рассогласования в плоскостях пеленгации Δβ′ и Δε′. 3 ил.
получают соответствующие рассогласования в плоскостях пеленгации Δβ′ и Δε′. 3 ил.
Способ обработки сигналов при одноканальной амплитудной пеленгации, при котором последовательно формируют четыре симметрично смещенные относительно равносигнального направления диаграммы направленности W1, W2, W3, W4, производят их попарное переключение в плоскостях пеленгации, при этом принимают сигнал, селектируют его по частоте, детектируют по амплитуде, демодулируют по частоте переключения, выделяя сигналы рассогласования по азимуту Δβ = W2-W4 и углу места Δε = W1-W3, отличающийся тем, что, перед попарным переключением диаграмм направленности в плоскостях пеленгации производят переключение каждой из сформированных диаграмм направленности с положением диаграммы направленности в направлении "холодное небо" W5, перед выделением сигналов рассогласования Δβ и Δε производят выделение сигналов W1 - W5, W2 - W5, W3 - W5, W4 - W5, и вычисление суммарных сигналов в плоскостях пеленгации (W1 - W5) + (W3 - W5), (W2 - W5) + (W4 - W5), а после - их нормировку к соответствующим суммарным сигналам:

получая соответствующие рассогласования в плоскостях пеленгации Δβ′, Δε′.
| ШИРМАН Я.Д | |||
| Теоретические основы радиолокации | |||
| - М | |||
| : Сов.радио, 1970, с.296 - 297 | |||
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1996 |
|
RU2107305C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПСИХОФИЗИЧЕСКОГО СОСТОЯНИЯ СТУДЕНТА ГУМАНИТАРНОГО ВУЗА | 2006 |
|
RU2317767C1 |
| Объемный насос | 1986 |
|
SU1402711A2 |

