Изобретение относится к области радиотехники и может быть использовано для обработки сигналов при амплитудной псевдомоноимпульсной пеленгации.
Известен способ обработки сигналов при амплитудной моноимпульсной пеленгации, при котором принимают сигнал антенной системой с элементами 1, 2, 3, 4, формируют суммарные 1+2, 3+4 и разностные 1-2, 3-4 сигналы, формируют суммарный сигнал 1+2+3+4 и разностные сигналы (1+2) - (3+4), (1+3) - (2+4) в плоскостях пеленгации, полученные сумму и разности усиливают, нормируют разностные сигналы суммарным сигналом, выделяя при этом сигналы ошибок в плоскостях пеленгации [А. И. Леонов, К. И. Фомичев. Моноимпульсная радиолокация. - М.: Сов. радио, 1970].
Недостатком этого способа является узкая полоса пропускания, составляющая из-за использования гибридных соединений величину порядка 10-15%, а также сильная подверженность влиянию аномальных флуктуаций в связи с большой "зашумленностью" низкочастотной части спектра фоном переменного тока, различного рода наводками, вибрационными и другими избыточными шумами.
Известен также способ обработки сигналов при амплитудной псевдомоноимпульсной пеленгации [Лайлс. Мобильный псевдомоноимпульсный радиолокатор сопровождения. Зарубежная радиоэлектроника, 1970, N6], принятый за прототип, при котором принимают сигнал четырехэлементной моноимпульсной антенной системой, формируют суммарные и разностные сигналы в плоскостях пеленгации, манипулируют полученные разности с подавлением несущей, суммируют манипулированные разности с суммарными сигналами в плоскостях пеленгации, полученные сигналы усиливают, нормируют, детектируют по амплитуде, результаты детектирования демодулируют по частоте манипуляции, выделяя при этом ошибки в плоскостях пеленгации.
Недостатком прототипа является невысокая (как и у аналога) полоса пропускания за счет использования гибридных соединений, большие диссипативные потери порядка 5 дБ при полосе пропускания 10-15%, неэффективное использование раскрыва антенны, за счет использования двух элементов для пеленгации по азимуту и двух - по углу места.
Целью настоящего изобретения является расширение полосы пропускания, уменьшение диссипативных потерь при обработке и увеличение дальности действия.
Для достижения поставленной цели предлагается способ обработки сигналов при амплитудной псевдомоноимпульсной пеленгации, при котором принимают сигнал четырехэлементной моноимпульсной антенной системой с элементами 1, 2, 3, 4, полученные сигналы усиливают, нормируют, детектируют по амплитуде.
Согласно изобретению принятые антенными элементами сигналы перекрестно переключают и суммируют, формируя две последовательности сигналов 1+2, 1+3, 3+4, 2+4, ...; 3+4, 2+4, 1+2, 1+3,...; детектированные по амплитуде сигналы вычитают, формируют сигналы нормировки из усиленных сигналов способом корреляционного приема, результаты вычитания демодулируют по частоте манипуляции с фазовыми сдвигами 0 и 90o, выделяя при этом сигналы ошибок в плоскостях пеленгации.
Сочетание отличительных признаков и свойства предлагаемого изобретения из литературы неизвестны, поэтому оно соответствует критериям новизны и изобретательского уровня.
На фиг. 1 приведена структурная электрическая схема устройства, реализующего предлагаемый способ;
на фиг. 2 приведено взаимное расположение облучающих элементов.
При реализации предлагаемого способа выполняется следующая последовательность операций:
- принимают сигнал четырехэлементной моноимпульсной антенной системой с элементами 1, 2, 3, 4:
- принятые антенными элементами 1, 2, 3, 4 сигналы перекрестно переключают и суммируют, формируя две последовательности сигналов 1+2, 1+3, 3+4, 2+4,...; 3+4, 2+4, 1+2,1+3,...;
- полученные сигналы усиливают, нормируют, детектируют по амплитуде;
- детектированные по амплитуде сигналы вычитают, формируют сигнал нормировки из усиленных сигналов способом корреляционного приема;
- результаты вычитания демодулируют по частоте манипуляции с фазовыми сдвигами 0o и 90o, выделяя при этом сигналы ошибок в плоскостях пеленгации.
Устройство, реализующее предлагаемый способ (фиг. 1), содержит зеркало 1, четырехэлементную облучающую систему 2, при этом выходы первого 2.1 и второго 2.2 элемента через перекрестные переключатели 3 и 4 связаны со входами сумматора 5, а выходы третьего 2.3 и четвертого 2.4 элементов через те же перекрестные переключатели 3 и 4 связаны со входами сумматора 6, выходы сумматоров 5 и 6, соответственно, через приемник 7, квадратичный детектор 8 и приемник 9 и квадратичный детектор 10 связаны со входами вычитающего устройства 11. Выходы приемников 7, 9 через коррелятор 12 связаны с управляющим входом усилителя с переменным коэффициентом усиления 13, другой вход и выход которого связаны, соответственно, с выходом вычитающего устройства 11 и входами демодуляторов 14, 15, другие входы которых связаны с выходами генератора 16. Другие выходы генератора 16 связаны с управляющими входами перекрестных переключателей 3 и 4.
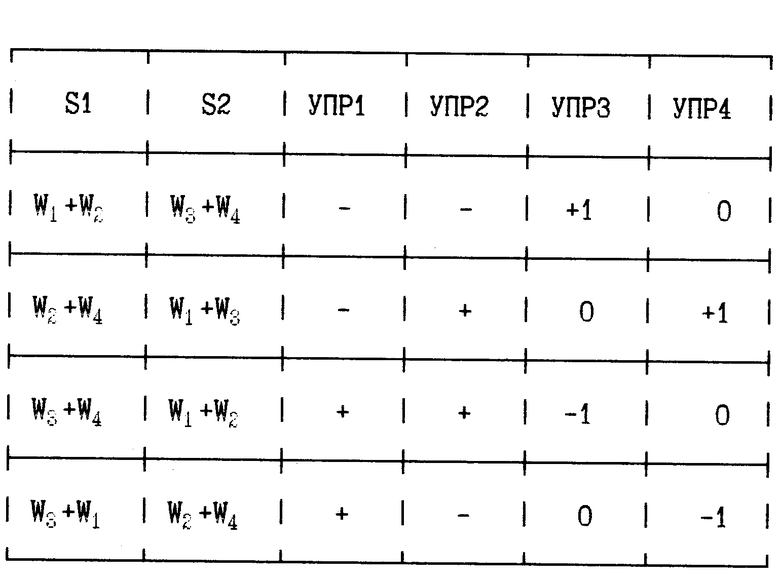
Устройство работает следующим образом. Пеленгуемый сигнал принимается амплитудной моноимпульсной антенной системой, состоящей из зеркала 1 и облучающей системы 2. Облучающая система 2 построена таким образом, что суммарные сигналы W1 + W2 и W3 + W4 образуют смещенные на 3 дБ в угломестной плоскости диаграммы направленности (ДН), a W1 + W3, и W2 + W4 - в азимутальной. Данные об управляющих сигналах генератора и формируемых при этом последовательностях сигналов приведены в таблице.
При подаче на управляющие входы перекрестных переключателей 3, 4 управляющих напряжений УПР1, УПР2, с генератора 16 в соответствии с таблицей, на выходах сумматоров 5,6 образуются две последовательности сигналов:
S1: W1+W2, W2+W4, W3+W4, W1+W3, W1+W2, W2+W4, W3+W4, W1+W3,...
S2: W3+W4, W1+W3, W1+W2, W2+W4, W3+W4, W1+W3, W1+W2, W2+W4,...
После селекции в приемниках 7, 9 и возведения в квадрат детекторами 8, 10 эти сигналы вычитаются в устройстве 11. Для обеспечения нормировки сигналы с выходов приемников 7, 9 поступают на коррелятор 12, где производится их умножение. Напряжение коррелятора Uк имеет ярко выраженную зависимость от направления приема. При нахождении сигнала в пределах линейной части пеленгационной характеристики (рабочая зона, основной лепесток ДН) Uк > 0, при выходе из рабочей зоны Uк≈0. Этот сигнал может быть использован для устранения неоднозначности отчета или обнаружения цели. В предлагаемом способе этот сигнал поступает на управляющий вход усилителя с переменным коэффициентом усиления 13, обеспечивая постоянство крутизны пеленгационной характеристики при изменении уровня сигнала.
В демодуляторах 14 и 15 производится умножение полученной разности, соответственно, на управляющие напряжения УПР3 и УПР4 и выделяются разностные сигналы в угломестной и азимутальной плоскостях.
Использование операций перекрестного переключения и суммиpoвaния позволило увеличить примерно в 5-6 раз полосу обрабатываемых сигналов и на 3-4 дБ уменьшить диссипатавные потери, что привело к увеличению дальности действия пеленгатора в 1,5 раза.
В Ростовском НИИ радиосвязи был изготовлен и испытан опытный образец устройства, реализующего предлагаемый способ.
Результаты испытаний полностью подтвердили расчетные характеристики устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2162233C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 2000 |
|
RU2194287C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2159940C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ КРОССПОЛЯРИЗОВАННЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2048682C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА | 2009 |
|
RU2393598C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА С ПОМОЩЬЮ ЛОКАТОРА | 1992 |
|
RU2067305C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ДВУХКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 2001 |
|
RU2225990C2 |


Изобретение относится к радиотехнике и может быть использовано для обработки сигналов при амплитудной псевдомоноимпульсной пеленгации. Технический результат - расширение полосы пропускания, увеличение дальности действия пеленгатора и уменьшение диссипативных потерь при обработке. Способ включает операции: принимают сигнал четырехэлементной моноимпульсной антенной системой с элементами 1,2,3,4; перекрестно переключая и суммируя сигналы формируют две последовательности сигналов 1+2, 1+3, 3+4, 2+4, ...., 3+4, 2+4, 1+2 , 1+3, ...; полученные сигналы усиливают, нормируют, детектируют по амплитуде; детектированные по амплитуде сигналы вычитают; формируют сигнал нормировки из усиленных сигналов способом корреляционного приема; результаты вычитания демодулируют по частоте манипуляции с фазовыми сдвигами 0 и 90°, выделяя при этом сигналы ошибок в плоскостях пеленгации. 2 ил., 1 табл.
Способ обработки сигналов при амплитудной псевдомоноимпульсной пеленгации, при котором принимают сигнал четырехэлементной моноимпульсной антенной системой с элементами 1, 2, 3, 4, принятые антенными элементами сигналы усиливают, нормируют, детектируют по амплитуде, отличающийся тем, что, принятые антенными элементами сигналы перекрестно переключают и суммируют, формируя две последовательности сигналов 1+2, 1+3, 3+4, 2+4, ..., 3+4, 2+4, 1+2, 1+3, ..., причем детектированные по амплитуде сигналы вычитают, формируют сигнал нормировки из усиленных сигналов способом корреляционного приема, результаты вычитания демодулируют по частоте манипуляции с фазовыми сдвигами 0 и 90o, выделяя при этом сигналы ошибок в плоскостях пеленгации.
| ЛАЙЛС, Мобильный псевдомоноимпульсный радиолокатор сопровождения, Зарубежная радиоэлектроника, 1970, N 6 | |||
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1996 |
|
RU2107305C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПСИХОФИЗИЧЕСКОГО СОСТОЯНИЯ СТУДЕНТА ГУМАНИТАРНОГО ВУЗА | 2006 |
|
RU2317767C1 |
| Объемный насос | 1986 |
|
SU1402711A2 |

