Изобретение относится к переключателю полярности согласно ограничительной части пункта 1 формулы изобретения. Подобный переключатель полярности известен, например, из ЕР 0 052 759 B1. Там для переключения направления движения стрелочного электропривода имеются четыре контакта реле контроля положения стрелки, которые в зависимости от желаемого направления движения подключают различные фазы сети трехфазного тока на две или три обмотки трехфазного двигателя. Реле для управления контактов реле контроля положения стрелки являются обычными в железнодорожной технике сигнализации сигнальными реле с принудительно замыкаемыми или размыкаемыми контактами. Положение переключения контактов реле контроля положения может контролироваться вне собственно цепи переводного тока стрелки за счет контроля положения обоих контактов реле контроля положения. Такие зарекомендовавшие себя на практике сигнальные реле являются механически чрезвычайно сложными и поэтому дорогими. В железнодорожной технике сигнализации все больше стремятся к применению вместо специальных реле обычных переключающих реле; это справедливо также для конструкции переключателей полярности для стрелочных приводов и для управления этих переключателей полярности.
Из EP 0 580 270 A1 известна схема для управления переключателя полярности, при которой управление реле контроля положения стрелки происходит через электронные переключатели (ключи). Реле контроля положения стрелки выполнены в виде моностабильных реле, которые подключаются или отключаются попарно. Это происходит через попарно взаимодействующие электронные переключатели. Эти электронные переключатели постоянно контролируются на их правильное поведение при работе таким образом, что не представленная электроника проверяет, проключены ли переключатели или нет. Если распознается ошибочное поведение переключения, то все четыре электронных переключателя включаются токопроводяще, причем текущий при этом ток разрушает предохранитель, через который проходит токоснабжение для электронных переключателей и реле контроля положения стрелки. Кто вызывает подключение всех четырех электронных переключателей, в ЕР A1 не раскрыто. Также не раскрыто, выполнены ли собственно реле контроля положения, как обычно, в виде сигнальных реле или в виде переключающих реле. Во всяком случае реле контроля положения стрелки выполнены в виде моностабильных реле, с тем, чтобы они, при необходимости, в случае неисправности переключателя могли отпускаться для размыкания цепи питания. Текущий контроль состояния переключения электронных переключателей представляет для возможно имеющейся, управляющей и контролирующей вычислительной системы за счет постоянной оценки напряжения известную вычислительную нагрузку, которая неблагоприятно воздействует на производительность такой вычислительной системы. Кроме того, является недостатком, что реле контроля положения стрелки постоянно включены попарно. Действительно ли перебросились их контакты при отключении реле с окончательной надежностью не установлено.
Задачей настоящего изобретения является создание переключателя полярности согласно ограничительной части пункта 1 формулы изобретения, который обходится без сигнальных реле и без дополнительных контрольных сообщений для контроля функционирования переключающих средств, управляющих реле контроля положения.
Изобретение решает эту задачу за счет применения отличительных признаков пункта 1 формулы изобретения. Предпочтительные формы выполнения и развития соответствующего изобретению переключателя полярности указаны в зависимых пунктах формулы изобретения.
Изобретение поясняется ниже более подробно с помощью представленного на чертеже примера выполнения. На чертеже, в частности, показано:
фиг. 1 - переключатель полярности и необходимые для его управления переключающие средства;
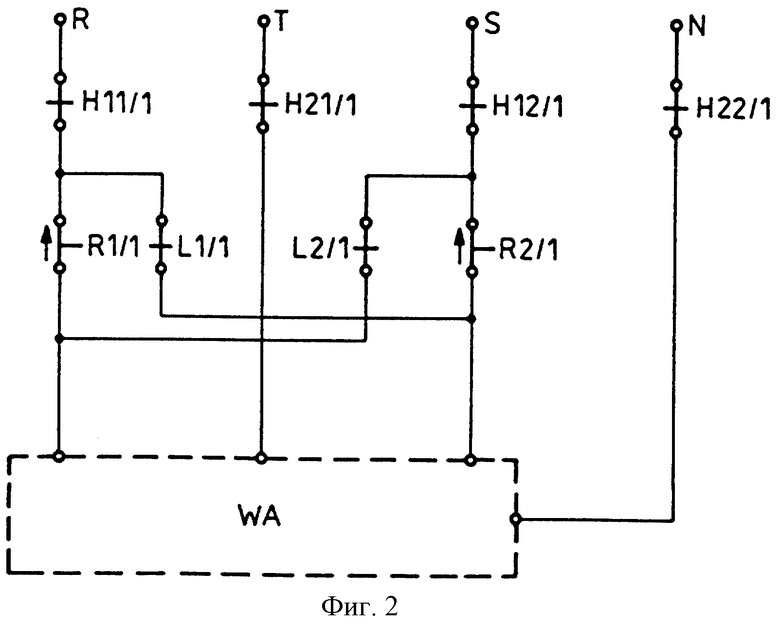
фиг. 2 - расположение переключателя полярности в цепи тока стрелочного привода.
Переключатель полярности состоит из, по меньшей мере, двух бистабильных реле R1 и L2 соответственно, каждое только с одной единственной обмоткой. Оба бистабильных реле включены последовательно, причем за счет внешней схемы обеспечено, что через них при временном приложении напряжения электроснабжения протекает ток или в одном, или другом направлении. Однако после отключения напряжения электроснабжения принятое положение переключения бистабильных реле остается сохраненным. В представленном примере выполнения предположено, что за счет последнего процесса подключения бистабильное реле контроля положения R1 попало в активное положение, а другое бистабильное реле L2 - в исходное положение. Если, как предположено, бистабильные реле имеют каждое только один единственный замыкающий контакт и подлежащий управлению стрелочный привод WA на фиг. 2 выполнен в виде трехфазного привода, то для переключения стрелочного привода наряду с реле контроля положения стрелки R1 и L2 в линиях снабжения требуются дополнительные реле контроля положения стрелки R2 и L1. Они включены параллельно ранее названным реле контроля положения стрелки и подвергаются одинаковому воздействию вместе с ними.
Подключение реле контроля положения стрелки происходит с применением реле направления R и L, выполненных в виде переключающих реле. Оба этих реле направления попеременно подключаются и отключаются из различных каналов К1 и К2 управляющей и контролирующей надежной вычислительной системы. Расположение контактов обоих реле направления R и L в управляющих цепях реле контроля положения R1, L2; R2, L1 выбрано так, чтобы в переключении реле контроля положения стрелки всегда должны активно действовать оба вычислительных канала. Это происходит через включенные последовательно замыкающие и размыкающие контакты обоих реле направления в управляющих цепях стрелочных реле.
При последнем процессе переключения реле направления R было подключено, а именно через соответствующую переводную команду вычислительного канала К1; к тому же моменту времени вычислительный канал К2 обесточил реле направления L. Через замыкающий контакт R/1 реле направления R и размыкающий контакт L/1 реле направления L при этом реле контроля положения R1, L2 R2, L1 были временно приложены к напряжению. При предположенном направлении тока при этом реле контроля положения R1 и R2 были включены в активное положение, а реле контроля положения L1 и L2 в исходное положение. Через контакты R1/1 и R2/1 реле контроля положения стрелки стрелочный привод WA после замыкания подключающих контактов H11/1, Н21/1, Н12/1 и Н22/1 переключился, и управляющая и контролирующая вычислительная система путем оценки сигнальных напряжений не представленных на чертеже сигнализаторов определила достижение нового конечного положения: Эти сигнализаторы включают контрольные потенциалы, которые подводятся к ним в определенной полярности через управляемые от привода контакты.
Если в более поздний момент времени стрелочный привод WA должен снова перейти в первоначальное состояние, то нужно изменить координацию фаз R и S относительно двух- или трехприводных обмоток. Это происходит при еще открытых подключающих контактах за счет открывания без нагрузки контактов реле контроля положения R1/1 и R2/1 и закрывания без нагрузки контактов реле контроля положения L1/1 и L2/1. Чтобы прийти к этому коммутационному циклу, активно включенные до сих пор реле контроля положения R1 и R2 переключаются в исходное положение и реле контроля положения L1 и L2 - в активное положение. Это вызывается управляющей вычислительной системой за счет отключения реле направления R и подключения реле направления L, и то, и другое из другого вычислительного канала. В цепи тока питания реле контроля положения стрелки после этого открываются контакты R/1 и L/1 реле направления R и L; одновременно закрываются размыкающие контакты R/2 и R/3, а также замыкающие контакты L/2 и L/3. Через эти контакты к реле контроля положения стрелки подводится, по меньшей мере, временное напряжение, причем, конечно, внутри реле контроля положения стрелки направление тока по сравнению с предыдущим временным промежутком рассмотрения меняется на обратное. Оба реле контроля положения R1 и R2 переключаются в исходное положение и реле контроля положения L1 и L2 переключаются в активное положение. Они вызывают своими контактами R1/1 и R2/1 или соответственно L1/1 и L2/1 требующуюся смену фаз для приводных обмоток, так что привод при закрывании подключающих контактов может переходить соответственно в другое положение.
Если, как предположено выше, реле направления R и L представлены переключающими реле, то надежно контролировать положение переключения их контактов в цепи тока подключения реле контроля положения стрелки путем оценки положения других контактов в других цепях тока не является возможным, поскольку не может быть исключено, что, например, один из контактов приваривается в одном или другом положении переключения, в то время как другой переключающий контакт соответствующего реле еще является правильно переключаемым. По этой причине поведение функционирования реле направления должно контролироваться другим образом. Прежде всего за счет придания в соответствие обоих реле направления различным вычислительным каналам и последовательной схемы замыкающих и размыкающих контактов обоих реле направления в цепях тока подключения реле контроля положения стрелки обеспечено, что оба вычислительных канала должны участвовать в вызывании движения переключения. То есть не достаточно, если, например, исходя из представленного положения вещей с подключенным реле направления R и отключенным реле направления L, - только вычислительный канал К2 инвертирует свой вывод (подключение реле направления L), в то время как вычислительный канал К1 сохраняет свой вывод (подключение реле направления R). В этом случае хотя контакт L/1 и открылся бы, в то время как одновременно контакты L/2 и L/3 закрылись; однако контакты R/1 до R/3 не перекинулись бы. Если теперь временно активировалось бы токоснабжение для реле контроля положения стрелки, то это ничего не изменило бы в состоянии переключения реле контроля положения стрелки, так как ток не мог бы течь ни в одном, ни в другом направлении. Таким образом стрелочный привод не мог бы также переводиться и вычислительная система из подведенных к ней контрольных сообщений распознала бы сохранение имеющегося до команды перевода конечного положения привода. Только когда оба вычислительных канала согласованно побуждают переключение привода таким образом, что один вычислительный канал подключает приданное ему в соответствие реле направления и другой вычислительный канал отключает приданное ему в соответствие реле направления, перевод стрелочного привода является возможным.
Приваривание, по меньшей мере, одного контакта реле направления воздействует как ошибочное управление реле направления: несмотря на участие обоих вычислительных каналов на самом деле не происходит никакого процесса переключения; вычислительная система распознает это из отсутствия ожидаемых ею сигнальных потенциалов. Если предполагается, что, например, контакт R/1 реле направления R приварился в представленном рабочем положении, в то время как оба остальных контакта этого реле являются правильно переключаемыми, то при реверсировании реле направления  для введения процесса перевода реле контроля направления стрелки через контакты R/2, L/2, а также R/3, L/3 замыкаются накоротко, так что в его положении переключения ничего не меняется. Если один из контактов реле направления R/2 или R/3 приваривается в представленном положении размыкания, то при приложении напряжения электроснабжения течения тока через реле контроля положения также не происходит и реле контроля положения сохраняют принятое активное или соответственно исходное положение. Если же в противоположность этому замыкающий контакт R/1 реле направления R не может быть закрыт из положении размыкания, то реле контроля положения R1 и R2 не могут быть переключены в активное положение и реле контроля положения L1 и L2 не могут быть переключены в исходное положение, то есть привод сохраняет принятое им до этого конечное положение. Если, по меньшей мере, один из контактов реле направления R/2 или R/3 не может быть закрыт, то реле контроля положения R1 и R2 не могут быть переключены в исходное положение и реле контроля положения L1 и L2 не могут быть переключены в активное положение и привод сохраняет принятое им до этого конечное положение. Такие же зависимости получаются, если один или несколько контактов реле контроля положения стрелки L2 не могут больше переключаться вследствие неисправности. Стрелочный привод тогда не может переводиться и ожидаемые вычислительной системой обратные сообщения привода для достижения нового конечного положения отсутствуют. Таким образом вычислительная система знает, что наступила неисправность, причем, конечно, для вычислительной системы не ясно, что эта неисправность обусловлена привариванием определенного контакта. Во всяком случае неисправность распознается в момент времени, в который соответствующий контакт реле направления нагружается в положении переключения, в котором он больше не может реверсироваться. Таким образом неисправность распознается в возможно ранний момент времени и имеется возможность быстрого устранения неисправности.
для введения процесса перевода реле контроля направления стрелки через контакты R/2, L/2, а также R/3, L/3 замыкаются накоротко, так что в его положении переключения ничего не меняется. Если один из контактов реле направления R/2 или R/3 приваривается в представленном положении размыкания, то при приложении напряжения электроснабжения течения тока через реле контроля положения также не происходит и реле контроля положения сохраняют принятое активное или соответственно исходное положение. Если же в противоположность этому замыкающий контакт R/1 реле направления R не может быть закрыт из положении размыкания, то реле контроля положения R1 и R2 не могут быть переключены в активное положение и реле контроля положения L1 и L2 не могут быть переключены в исходное положение, то есть привод сохраняет принятое им до этого конечное положение. Если, по меньшей мере, один из контактов реле направления R/2 или R/3 не может быть закрыт, то реле контроля положения R1 и R2 не могут быть переключены в исходное положение и реле контроля положения L1 и L2 не могут быть переключены в активное положение и привод сохраняет принятое им до этого конечное положение. Такие же зависимости получаются, если один или несколько контактов реле контроля положения стрелки L2 не могут больше переключаться вследствие неисправности. Стрелочный привод тогда не может переводиться и ожидаемые вычислительной системой обратные сообщения привода для достижения нового конечного положения отсутствуют. Таким образом вычислительная система знает, что наступила неисправность, причем, конечно, для вычислительной системы не ясно, что эта неисправность обусловлена привариванием определенного контакта. Во всяком случае неисправность распознается в момент времени, в который соответствующий контакт реле направления нагружается в положении переключения, в котором он больше не может реверсироваться. Таким образом неисправность распознается в возможно ранний момент времени и имеется возможность быстрого устранения неисправности.
Соответствующая изобретению схема может не только применяться для стрелочных приводов, эксплуатируемых от трехфазной сети через четыре жилы, но и с успехом может в принципе применяться для всех приводов, которые через реле контроля положения являются попеременно переключаемыми в одно или другое направление, то есть, например, также и для однофазных приводов. Для управления таких однофазных приводов требуются конечно только два контакта реле контроля положения и, таким образом, только два реле контроля положения.
Изобретение относится к стрелочным приводам. Переключатель содержит бистабильные реле контроля положения. Предусмотрены два переключающих реле направления, управляемых из различных вычислительных каналов. Каждое бистабильное реле контроля положения содержит одну обмотку. Бистабильные реле попарно включены последовательно так, что при одном направлении тока в активное состояние попадает одна, а при другом направлении тока другая пара. Последовательная схема бистабильных реле через замыкающий контакт одного реле направления соединена с одним полюсом источника питающего напряжения, а через размыкающий контакт другого реле направления - с другим полюсом. К последовательной схеме бистабильных реле с замыкающим или соответственно размыкающим контактом одного или соответственно другого реле направления параллельно включена соответственно последовательная схема из размыкающего контакта одного реле направления и замыкающего контакта другого реле направления. Технический результат - возможность исключения сигнальных реле и дополнительных сообщений для контроля управляющих реле. 3 з.п.ф-лы, 2 ил.
| Устройство для управления стрелкой | 1978 |
|
SU765074A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2047264C1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1618249C |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ НЕБНО-ГЛОТОЧНОГО ЗАТВОРА У ДЕТЕЙ С ВРОЖДЕННОЙ РАСЩЕЛИНОЙ НЕБА ПОСЛЕ УРАНОПЛАСТИКИ | 1996 |
|
RU2128007C1 |
| US 3708660 A, 02.01.1973 | |||
| US 4756494 A, 12.07.1988 | |||
| DE 15300379 A, 16.09.1973 | |||
| Способ модифицирования чугуна | 1984 |
|
SU1199802A1 |
| СПОСОБ УДАЛЕНИЯ ЛЕДЯНЫХ, ГАЗОГИДРАТНЫХ И ПАРАФИНОВЫХ ОТЛОЖЕНИЙ | 1999 |
|
RU2148151C1 |
| DE 3715478 A1, 17.11.1988 | |||
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СОЛОМЫ НА КОРМ | 1989 |
|
RU2038031C1 |
| DE 3004366 А1, 08.07.1982 | |||
| Композиция на основе диорганополисилоксана, содержащего концевые ацилоксигруппы | 1974 |
|
SU517614A1 |

