Изобретение относится к области электронной измерительной техники и может быть использовано в системах, построенных на базе прецизионных частотно-импульсных измерителей.
Известен частотно-импульсный измеритель [1], содержащий преобразователь напряжения в частоту, первый и второй делители частоты, преобразователь частоты в среднее значение постоянной величины, генератор, стабилизатор напряжения, триггер, коммутатор, первый, второй и третий ключи.
Недостаток этого известного частотно-импульсного измерителя в его сложности и низкой точности измерения.
Наиболее близким техническим решением к предлагаемому изобретению является прецизионный частотно-импульсный измеритель, содержащий датчик измеряемого параметра, блок широтно-импульсной модуляции, усилитель, кварцевый генератор, стабилизатор тока, первый, второй, третий и четвертый ключи, соединенные по мостовой схеме, первый и второй делители частоты [2].
Недостаток этого измерителя состоит в том, что он достаточно сложен и не обеспечивает высокой точности из-за невозможности формирования длительности выходного импульса блока широтно-импульсной модуляции, кратной периоду выходного сигнала кварцевого генератора.
Задача изобретения - повышение точности и упрощение прецизионного частотно-импульсного измерителя.
Эта задача достигается тем, что в прецизионный частотно-импульсный измеритель, содержащий датчик измеряемого параметра, усилитель, кварцевый генератор, стабилизатор тока, мостовую схему, образованную цепью из последовательно соединенных второго и первого ключей, параллельно которой включена вторая цепь из последовательно соединенных третьего и четвертого ключей, в диагональ мостовой схемы включена цепь формирования уравновешивающего сигнала датчика измеряемого параметра, выход которого соединен с входом усилителя, а выход стабилизатора тока соединен с входом мостовой схемой, дополнительно введены релейный элемент с гистерезисом, D-триггер, первый и второй элементы И, первые входы которых объединены с выходом кварцевого генератора и с C-входом D-триггера, неинверсный выход которого соединен со вторым входом первого элемента И и входом управления второго и четвертого ключей, инверсный выход соединен со вторым входом второго элемента И и входом управления первого и третьего ключей, а D вход подключен к выходу релейного элемента с гистерезисом, вход которого соединен с выходом усилителя, при этом выходы первого и второго элементов И соединены с выходной шиной положительного и шиной отрицательного сигналов соответственно.
На чертеже приведена блок-схема прецизионного частотно-импульсного измерителя. На этой схеме: 1 - датчик измеряемого параметра, 2 - усилитель, 3 - релейный элемент с гистерезисом, 4 - D-триггер, 5 - кварцевый генератор, 6 - первый ключ, 7 - второй ключ, 8 - третий ключ, 9 - четвертый ключ, 10 - стабилизатор тока, 11 - первый элемент И, 12 - второй элемент И, 13 - выходная шина положительного сигнала, 14 - выходная шина отрицательного сигнала, 15 - мостовая схема.
В прецизионном частотно-импульсном измерителе выход датчика измеряемого параметра 1 соединен со входом усилителя 2, соединенного последовательно с релейным элементом с гистерезисом 3, выход которого подключен к D-входу D-триггера 4, С-вход которого соединен с выходом кварцевого генератора 5, первыми входами первого 11 и второго 12 элементов И, неинверсный выход D-триггера 4 соединен с входами управления второго 7 и четвертого 9 ключей и вторым входом первого элемента И 11, выход которого подключен к выходной шине положительного сигнала 13, инверсный выход D-триггера 4 соединен с входами управления первого 6 и третьего 8 ключей и вторым входом второго элемента И 12, выход которого подключен к выходной шине отрицательного сигнала 14. Мостовая схема 15 образована цепью из последовательно соединенных второго 7 и первого 6 ключей, параллельно которой включена вторая цепь из последовательно соединенных третьего 8 и четвертого 9 ключей. В диагональ мостовой схемы 15 включена цепь формирования уравновешивающего сигнала датчика измеряемого параметра с индуктивностью, вход мостовой схемы 15 соединен с выходом стабилизатора тока 10.
Рассмотрим работу прецизионного частотно-импульсного измерителя на примере использования в качестве датчика измеряемого параметра акселерометра маятникового типа. В зависимости от измеряемого ускорения чувствительный элемент (маятник) акселерометра отклоняется и величина отклонения регистрируется датчиком. Если на вход акселерометра подавать сигнал, уравновешивающий отклонение чувствительного элемента, то величина этого сигнала (тока обратной связи Ioc) будет в точности соответствовать значению измеряемого ускорения а, т.е.
а=kIoc (1)
где k - масштабный коэффициент.
Пусть на акселерометр действует ускорение а. Под действием этого ускорения чувствительный элемент начинает отклоняться и выходной сигнал UD датчика измеряемого параметра 1 поступает на вход усилителя 2, с выхода которого сигнал U поступает на вход релейного элемента с гистерезисом 3. При достижении сигналом U значения h включается релейный элемент с гистерезисом 3 и его выходной сигнал UP=1 (высокий уровень) поступает на вход D-триггера 4. Импульсом с генератора 5 D-триггер 4 переводится в единичное состояние и его выходной сигнал U+=1 с неинверсного выхода поступает на вход управления второго 7 и четвертого 9 ключей мостовой схемы 15 и второй вход первого элемента И 11. С этого момента времени стабилизатор тока 10 формирует уравновешивающий сигнал Iос через открытые второй 7 и четвертый 9 ключи на вход датчика измеряемого параметра 1, а с выхода первого элемента И 11 импульсы f+ с генератора 5 поступают на выходную шину положительного сигнала 13. Ток обратной связи Iос направлен таким образом, чтобы препятствовать дальнейшему перемещению чувствительного элемента, и выбирается из условия Iос>Imax, где Imax - максимально возможное значение тока, соответствующего сигналу, уравновешивающему максимально возможное измеряемое ускорение аmax.
С момента включения второго 7 и четвертого 9 ключей чувствительный элемент акселерометра начинает перемещаться в обратном направлении, выходной сигнал UD датчика измеряемого параметра 1 уменьшается и при выходном сигнале усилителя 2 U=-h переключается релейный элемент с гистерезисом 3 и его выходной сигнал Up= 0 переводит триггер 4 в нулевое состояние. Выходной сигнал триггера 4 с инверсного выхода U-=1 поступает на вход управления первого 6 и третьего 8 ключей мостовой схемы 15 и второй вход второго элемента И 12. С этого момента времени стабилизатор тока 10 формирует уравновешивающий сигнал Ioc другого направления через открытые первый 6 и третий 8 ключи на вход датчика измеряемого параметра 1, а с выхода второго элемента И 12 импульсы f- с генератора 5 поступают на выходную шину отрицательного сигнала 14. С этого момента времени чувствительный элемент акселерометра начинает перемещаться в обратном направлении, выходной сигнал UD датчика измеряемого параметра 1 увеличивается и при выходном сигнале усилителя 2 U=h переключается релейный элемент с гистерезисом 3 и его выходной сигнал UP=1 переводит триггер 4 в единичное состояние. Далее процесс переключения триггера 3 и формирования выходных сигналов f+ и f- повторяется аналогично уже описанному.
Пусть Т1 - время нахождения D-триггера 4 в единичном состоянии, Т2 - время нахождения D-триггера 4 в нулевом состоянии, Т0 - период следования импульсов F кварцевого генератора 5. Для интервала времени (Т1+Т2) справедливо соотношение
а (Т1+Т2)=k Ioc(T1-T2), (2)
или
а=k Ioc(n1-n2) T0(Т1+T2)-1, (3)
где n1 - число импульсов генератора 5 за время Т1 (выходной сигнал f+), n2 - число импульсов генератора 5 за время T2 (выходной сигнал f-). Таким образом, в соответствии с (3) измеряемый сигнал а на интервале времени (Т1+Т2) определяется разностью числа импульсов (n1-n2).
Эффект от использования предлагаемого изобретения состоит в повышении точности и упрощении прецизионного частотно-импульсного измерителя. Оценим вначале точность предлагаемого изобретения. Основными параметрами, влияющими на точность измерения, являются погрешности кварцевого генератора 5 и стабилизатора тока 10. Погрешность Δа измеряемого ускорения можно представить в виде
Δa = k(ΔIOCta+ΔtaIOC), (4)
где ta=(T1-Т2)/(Т1+Т2), ΔIOC - погрешность стабилизатора тока 10, Δta - погрешность формирования величины ta. Пусть относительная погрешность δI стабилизатора тока 10 равна 10-4, а относительная погрешность δT кварцевого генератора 10-5. Тогда при Ioc=10 мА, k=1 Mc-2/мА и а=8 Mc-2, ta=0,8, что следует из (2), Δta определяется погрешностью кварцевого генератора 5 и равна 0,8 • 10-5, а погрешность измерения ускорения Δa = 0,9•10-3 Мс-2. Относительная погрешность измерения δa ускорения будет равна Δa/a = 1,1•10-4, что составляет 0,011%.
Оценим погрешность известного измерителя [2]. Основная погрешность известного решения определяется неточностью формирования интервалов широтно-импульсной модуляции вследствие невозможности формирования указанных интервалов кратно периоду Т0 кварцевого генератора. В результате погрешность ΔТ формирования интервалов составляет величину Т0. Для рассмотренного выше случая основную погрешность измерения Δа можно записать в виде
Δa = kIOCΔT/T = kIOCT0/T, (5)
где Т - период широтно-импульсной модуляции. Для Т=0,01 с значение Δа= 0,01 Mс-2. Относительная погрешность δa = Δa/a известного решения составит 0,0012 или 0,12%, что значительно хуже, чем у предлагаемого изобретения.
Предлагаемое изобретение значительно проще известного решения, так как не содержит блока формирования широтно-импульсной модуляции, представляющего собой сложное электронное устройство. Кроме того, предлагаемое решение не содержит первого и второго делителей частоты с достаточно большим коэффициентом деления (обычно более 1000).
Предлагаемая совокупность признаков в рассмотренных автором решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень". В качестве элементов для реализации устройства могут быть использованы логические элементы И, триггеры, ключи любых серий, например, серии 564, стандартные релейные элементы, стабилизаторы тока, кварцевые генераторы, усилители.
Источники информации
1. П. В. Новицкий, В. Г. Кнорринг, B.C. Гутников. Цифровые приборы с частотными датчиками. "Энергия" Ленинградское отделение, 1970 г., с. 364, фиг.13-2.
2. П. В. Новицкий, В. Г. Кнорринг, В.С. Гутников. Цифровые приборы с частотными датчиками. "Энергия" Ленинградское отделение, 1970 г., с. 371, фиг.13-6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2002 |
|
RU2208796C1 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2001 |
|
RU2208797C1 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2194999C1 |
| СПОСОБ ЧАСТОТНО-ИМПУЛЬСНОГО ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО СИГНАЛА И ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2199758C1 |
| СПОСОБ ЧАСТОТНО-ИМПУЛЬСНОГО ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО СИГНАЛА И ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2199757C1 |
| ИНТЕГРАЛЬНЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2325664C2 |
| КОММУТАТОР НАПРЯЖЕНИЯ С ЗАЩИТОЙ ОТ ПЕРЕГРУЗКИ ПО ТОКУ | 2001 |
|
RU2208292C2 |
| УСТРОЙСТВО ВЫБОРА СИГНАЛА | 2001 |
|
RU2208245C2 |
| УСТРОЙСТВО ВЫБОРА СИГНАЛОВ | 2001 |
|
RU2208246C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2194998C1 |
Использование в системах, построенных на базе прецизионных частотно-импульсных измерителей. Технический результат заключается в повышении точности измерения за счет формирования уравновешивающего сигнала, точного по амплитуде и по длительности, кратной периоду кварцевого генератора. Прецизионный частотно-импульсный измеритель содержит релейный элемент с гистерезисом, D-триггер, мостовую схему, стабилизатор тока, кварцевый генератор. Измерение параметра осуществляется путем формирования уравновешивающего сигнала, компенсирующего отклонение чувствительного элемента, и преобразования этого сигнала в прецизионную частотно-импульсную последовательность. 1 ил.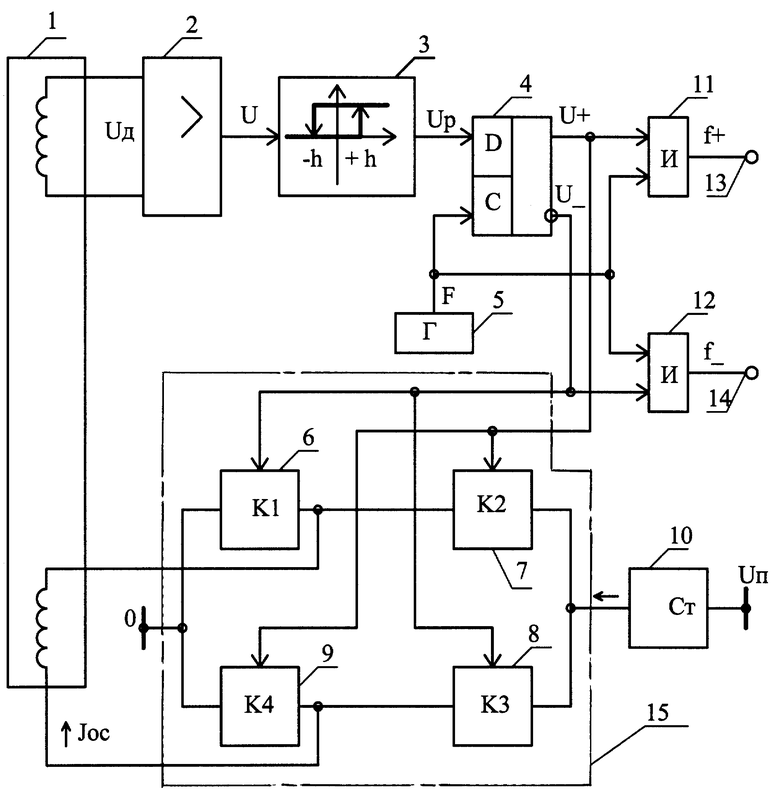
Прецизионный частотно-импульсный измеритель, содержащий датчик измеряемого параметра, усилитель, кварцевый генератор, стабилизатор тока, мостовую схему, образованную цепью из последовательно соединенных второго и первого ключей, параллельно которой включена вторая цепь из последовательно соединенных третьего и четвертого ключей, в диагональ мостовой схемы включена цепь формирования уравновешивающего сигнала датчика измеряемого параметра, выход которого соединен с входом усилителя, а выход стабилизатора тока соединен с входом мостовой схемы, отличающийся тем, что в него дополнительно введены релейный элемент с гистерезисом, D-триггер, первый и второй элементы И, первые входы которых объединены с выходом кварцевого генератора и с С-входом D-триггера, неинверсный выход которого соединен со вторым входом первого элемента И и входом управления второго и четвертого ключей, инверсный выход соединен со вторым входом второго элемента И и входом управления первого и третьего ключей, а D-вход подключен к выходу релейного элемента с гистерезисом, вход которого соединен с выходом усилителя, при этом выходы первого и второго элементов И соединены с выходной шиной положительного и шиной отрицательного сигналов соответственно.
| НОВИЦКИЙ П.В | |||
| и др | |||
| Цифровые приборы с частотными датчиками | |||
| Энергия | |||
| Ленинградское отделение, 1970, с.371 | |||
| 0 |
|
SU308506A1 | |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЧАСТОТУ СЛЕДОВАНИЯ ИМПУЛЬСОВ | 0 |
|
SU304512A1 |
| ИНТЕГРАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2138826C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ГАРМОНИЧЕСКИХ СОСТАВЛЯЮЩИХ ТОКА И НАПРЯЖЕНИЯ | 1994 |
|
RU2093841C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ ВЕРТИКАЛЬНОГО ТИПА (ВАРИАНТЫ) | 2013 |
|
RU2506463C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ МЕТАЛЛОСОДЕРЖАЩИХ КОНЦЕНТРАТОВ | 1994 |
|
RU2082780C1 |
